基于路面辨識的主動避撞系統(tǒng)制動性能
2018-03-01 05:24:20袁朝春張龍飛何友國范興根
吉林大學(xué)學(xué)報(bào)(工學(xué)版) 2018年2期
袁朝春,張龍飛,陳 龍,何友國,范興根
(江蘇大學(xué) 汽車與交通工程學(xué)院,江蘇 鎮(zhèn)江212013)
0 引 言
美國國家高速公路安全委員會(NHTSA)的調(diào)研表明,致死道路交通事故中,90%以上歸咎于駕駛員錯誤駕駛,只有3%的交通事故是車輛故障引起的[1]。因而針對糾正駕駛員錯誤駕駛的安全系統(tǒng)研究,將在很大程度上降低事故發(fā)生概率。主動避撞系統(tǒng)可以在事故發(fā)生前警示駕駛員,并在駕駛員未做出相應(yīng)避險(xiǎn)操作時(shí)自動控制車輛,達(dá)到規(guī)避危險(xiǎn)的目的。研究表明[2],主動避撞系統(tǒng)可使追尾事故概率降低62%。然而現(xiàn)有主動避撞系統(tǒng)往往忽視了道路因素,沒有充分發(fā)揮路面附著條件,導(dǎo)致制動性能變差,避撞效率降低。汽車制動性能作為汽車的主要性能之一,直接關(guān)系到交通安全。影響制動性能的因素很多,如車速、制動力、道路條件等[3],其中道路條件是影響制動性能的關(guān)鍵因素。
文獻(xiàn)[4]提出ABS汽車在滑動率為15%~20%時(shí)獲得最大制動力系數(shù),制動距離最短。文獻(xiàn)[5]認(rèn)為ABS通常減少在干燥和光滑的表面上的停止距離,但它也可以在某些條件下增加制動距離。為此提出了路面預(yù)測和控制雙循環(huán)的策略,改善了ABS的適用性。另外,在路面識別方面,文獻(xiàn)[6]結(jié)合輪胎力學(xué)模型和UKF算法對輪胎縱向力和滑移率進(jìn)行估計(jì),進(jìn)而得到不同附著系數(shù)路面條件下的曲線斜率,通過建立與典型路面之間的映射關(guān)系,準(zhǔn)確地識別路面。但是該方法在估算過程中需要較多的數(shù)據(jù)點(diǎn),因此實(shí)時(shí)性較差。Wang等[7]提出根據(jù)狀態(tài)特征因子對路面進(jìn)行識別的方法,通過路面類型識別間接獲得路面附著系數(shù),識別準(zhǔn)確率高,但識別結(jié)果局限于幾種典型路面。也有部分學(xué)者通過直接估計(jì)輪胎力完善車輛控制系統(tǒng)。文獻(xiàn)[8]提出利用交互多模型無跡卡爾曼濾波算法估計(jì)輪胎路面力和側(cè)偏角,在可變駕駛條件下提供了更準(zhǔn)確和可靠的估計(jì),適應(yīng)各種路況。
本文主要構(gòu)思基于路面特性的制動系統(tǒng)方案,設(shè)計(jì)了路面峰值附著系數(shù)辨識算法,準(zhǔn)確率高,且適用路面范圍廣;并根據(jù)路面附著條件進(jìn)行了制動性能研究,為了提高制動壓力控制的響應(yīng)速度及魯棒性,設(shè)計(jì)了單神經(jīng)元PID壓力控制器。
1 路面辨識
1.1 辨識算法
Burckhardt等[9]通過大量試驗(yàn)提出了一個輪胎-路面數(shù)學(xué)模型,可以較準(zhǔn)確地描述輪胎與路面之間的非線性縱向附著特性,其表達(dá)式為:

式中:c1、c2、c3為典型路面的參數(shù)值。
圖1為Burckhardt輪胎模型中6種典型路面的附著系數(shù)-滑移率曲線。
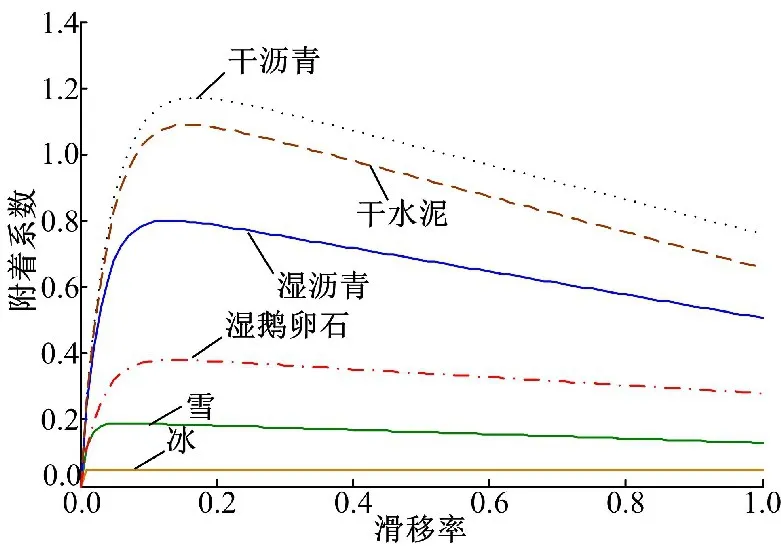
圖1 典型路面的μ-s曲線Fig.1 Typical roadμ-s curve
從圖1可以看出,不同路面的附著系數(shù)-滑移率曲線都非常相似,其非線性變化的趨勢和規(guī)律基本相同,即附著系數(shù)都是隨著滑移率的增加從零增加到峰值附著系數(shù),然后再緩慢減小到滑動附著系數(shù),所以可以認(rèn)為附著系數(shù)-滑移率曲線是每種路面的固有特性,可將它作為路面識別的重要依據(jù)。
基于路面的附著系數(shù)曲線相似的固有特性,定義無量綱特征值τ表征目標(biāo)路面與已知路面的相似度。認(rèn)為目標(biāo)路面與相近的兩條路面都具有一定的相似性,且滿足τ1+τ2=1,因此,目標(biāo)路面的峰值附著系數(shù)可以表示為:

式中:τ1、τ2為目標(biāo)路面與相近兩條路面的相似度;μ1max、μ2max為相近兩條路面的峰值附著系數(shù)。
τ的定義如下:

式中:φ為當(dāng)前路面的利用附著系數(shù);φ1、φ2分別為所選兩條路面的利用附著系數(shù)。
所選兩條路面為已知6條路面中與目標(biāo)路面相鄰的兩條路面,且滿足如圖2所示要求,[φ1]min>φ>[φ2]max。
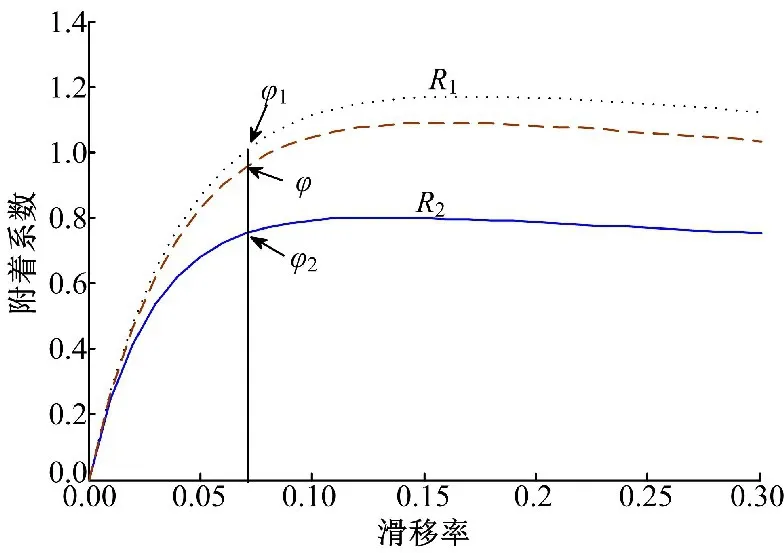
圖2 相似路面的μ-s曲線Fig.2 Similar roadμ-s curve
車輪滑移率s和利用附著系數(shù)φ的定義分別為:
式中:v為車輪中心的速度;r為車輪半徑;w為車輪的角速度;F X為地面對車輪的縱向力;F Z為車輪垂直載荷。
1.2 仿真驗(yàn)證
為了驗(yàn)證算法的有效性,首先利用該算法辨識干水泥路面的峰值附著系數(shù)。其中,滑移率s采用斜率為0.1的遞增信號,Burckhardt輪胎模型產(chǎn)生路面信號,實(shí)時(shí)輸出路面利用附著系數(shù)φ。圖3為干水泥路面辨識結(jié)果。
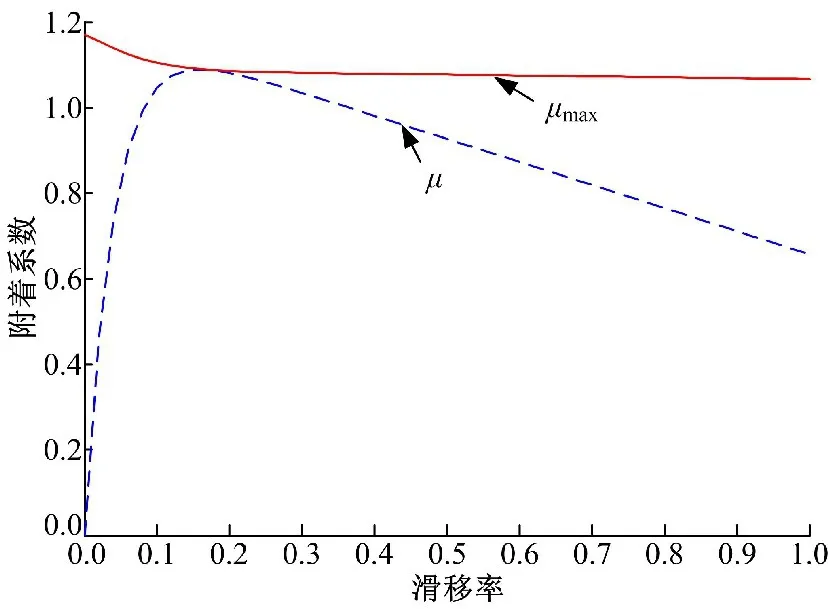
圖3 干水泥路面辨識結(jié)果Fig.3 Result of dry cement road identification
由圖3可以看出,在滑移率為0~2%期間,由于滑移率較低,識別結(jié)果與干瀝青路面較為相似,峰值附著系數(shù)辨識結(jié)果為[1.17,1.09],在其余滑移率(2%~100%)下,辨識效果較好,峰值附著系數(shù)辨識結(jié)果為[1.09~1.07],與設(shè)定的幾乎一致,誤差在2%以內(nèi)。結(jié)果表明,該算法辨識效果較好,精度較高。且滑移率從0~1的辨識結(jié)果一致性較好,最大誤差在0.08以內(nèi),充分證明了算法精度較高。
為了進(jìn)一步驗(yàn)證算法的適用性,再次利用辨識算法計(jì)算雪路面的峰值附著系數(shù)。同樣,滑移率s采用斜率為0.1的遞增信號,Burckhardt輪胎模型產(chǎn)生路面信號。圖4為雪路面辨識結(jié)果。
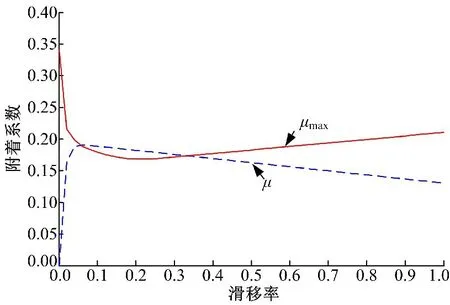
圖4 雪路面辨識結(jié)果Fig.4 Result of snow road identification
由圖4可以看出,在滑移率為0~2%時(shí),由于滑移率較低,識別結(jié)果與濕鵝卵石路面較為相似,峰值附著系數(shù)辨識結(jié)果較大。在滑移率為5%~15%時(shí),辨識算法準(zhǔn)確識別出路面為雪路面,峰值附著系數(shù)辨識結(jié)果范圍為[0.20,0.18],誤差在5%左右。滑移率在20%~100%范圍內(nèi),當(dāng)峰值附著系數(shù)辨識結(jié)果在滑移率為20%時(shí),最小為0.175,在滑移率為100%時(shí),最大為0.21,與設(shè)定的雪路面峰值附著系數(shù)0.19基本一致,滿足要求。結(jié)果表明,該辨識算法在較差路面同樣具有較高的精度。
2 制動系統(tǒng)建模
汽車的制動性能與道路條件、氣候條件、汽車結(jié)構(gòu)和技術(shù)狀況有關(guān),車輪的最大制動力受到路面附著系數(shù)的限制,所以汽車的最大制動減速度受到路面附著條件的限制,分析路面附著條件對汽車制動性能的影響,對充分發(fā)揮汽車的制動性有著決定性的意義。
2.1 制動減速度
制動減速度是制動時(shí)車速對時(shí)間的導(dǎo)數(shù),即dv/dt。它反映了地面制動力的大小[10]。
在不同路面上,由于地面制動力為:

故汽車能達(dá)到的減速度為:

若裝有理想的制動防抱死裝置來控制汽車的制動,使車輪制動力達(dá)到地面制動力極限,則制動減速度為:

式中:F Xb為地面制動力;φb為制動力系數(shù);G為汽車重力;g為重力加速度;φp為路面峰值附著系數(shù)。
本文主要分析針對不同路面獲得的最大制動減速度,通過路面辨識獲得路面峰值附著系數(shù),所以期望制動減速度為:

2.2 逆制動力模型
在制動時(shí),被控車輛處于直線行駛狀態(tài),因此,考慮建立被控車輛沿其前進(jìn)方向的制動動力學(xué)模型。在制動時(shí),逆制動力模型根據(jù)期望加速度和車速計(jì)算出期望制動壓力。
根據(jù)車輛受力分析圖5,其中,v為車速,Fw為空氣阻力,Ts為驅(qū)動力矩,Tbf、Tbr分別為前輪和后輪的制動力矩,Ff和Fr分別為地面作用于前、后輪的切向力,Wf和Wr分別為前、后輪的垂直載荷。
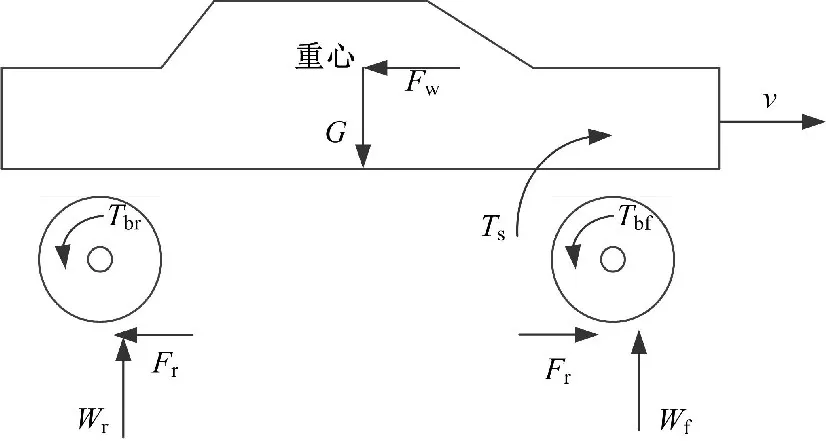
圖5 車輛受力分析圖Fig.5 Force analysis of vehicle
忽略車輛旋轉(zhuǎn)部件的質(zhì)量換算,將車輛運(yùn)動方程表示如下:

式中:Ft為驅(qū)動力;F Xb為制動力;∑F(v)為各種阻力的總和,本文簡化∑F(v),只取其風(fēng)阻值和滾動阻力,即:

式中:CD為空氣阻力系數(shù);Aa為迎風(fēng)面積;f為滾動阻力系數(shù);ρ為空氣密度。
由式(11)和式(12)可得期望制動力計(jì)算及逆制動模型為:

式中:Pdes為期望制動壓力;Kb為比例系數(shù)。
2.3 制動壓力控制器
制動壓力控制器旨在實(shí)時(shí)控制輪缸制動壓力,使其達(dá)到期望制動壓力值,從而實(shí)現(xiàn)汽車的主動制動[11]。因此,壓力控制器要求快速達(dá)到目標(biāo)值并且盡量消除超調(diào)和靜差。常規(guī)PID對于線性定常系統(tǒng)的控制非常有效,但對于汽車制動這種非線性、時(shí)變的復(fù)雜系統(tǒng),因其PID參數(shù)不是整定困難就是無法整定,因而很難達(dá)到預(yù)期的控制效果。單神經(jīng)元作為構(gòu)成神經(jīng)網(wǎng)絡(luò)的基本單位,具有自學(xué)習(xí)和自適應(yīng)能力,且結(jié)構(gòu)簡單而易于計(jì)算。相較于傳統(tǒng)PID,單神經(jīng)元PID對非線性時(shí)變復(fù)雜系統(tǒng)的適應(yīng)性更好,而且可以自整定控制參數(shù),省去了繁瑣的參數(shù)整定環(huán)節(jié),所以本文采用單神經(jīng)元PID控制策略設(shè)計(jì)制動壓力控制器。
單神經(jīng)元PID控制器的基本結(jié)構(gòu)如圖6所示。將期望制動壓力Pdes與實(shí)際制動壓力P的差值作為單神經(jīng)元PID控制器的輸入,采用有監(jiān)督的Hebb學(xué)習(xí)規(guī)則后,可實(shí)現(xiàn)PID參數(shù)的在線自整定,且能保證系統(tǒng)的魯棒性。
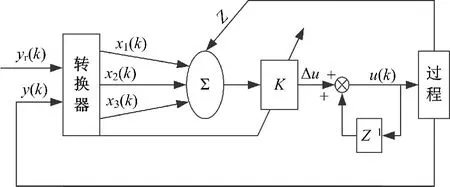
圖6 單神經(jīng)元PID控制器結(jié)構(gòu)圖Fig.6 Structure diagram of single neuron PID controller
制動壓力控制算法如下:
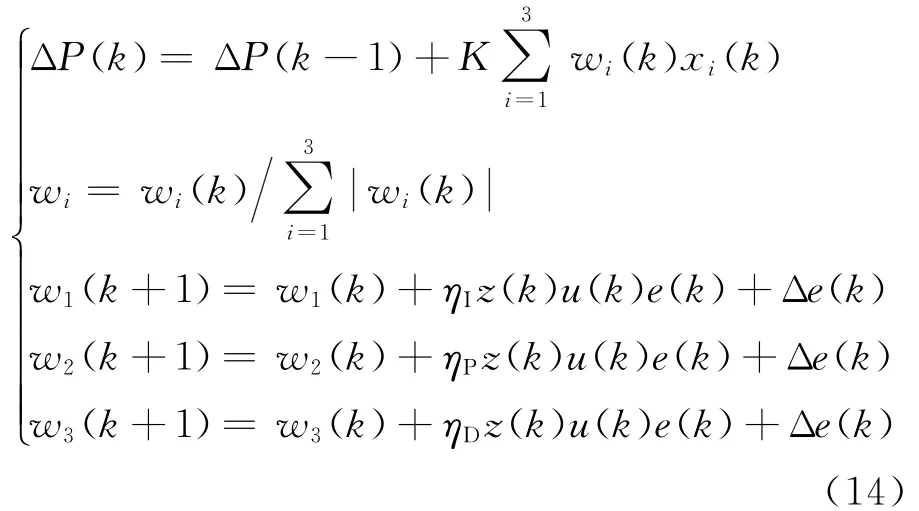
式中:ΔP為期望制動壓力與實(shí)際制動壓力差值。ηI、ηP、ηD分別為積分、比例、微分的學(xué)習(xí)速率;K為神經(jīng)元的比例系數(shù);w i(k)為對應(yīng)于狀態(tài)量x i(k)的加權(quán)系數(shù);u(k)為輸出值;e(k)為偏差值;Δe(k)為偏差值的差值。
在Simulink中搭建如圖7所示的制動壓力控制仿真模型。由于本文所建制動系統(tǒng)主要是實(shí)現(xiàn)主動避撞系統(tǒng)中主動制動的功能,故只針對基本制動功能進(jìn)行仿真驗(yàn)證,即驗(yàn)證制動壓力響應(yīng)效果。
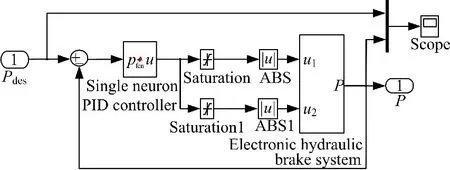
圖7 制動壓力控制仿真模型Fig.7 Simulation model of brake pressure control
分別設(shè)定期望制動壓力為2.5、5、8 MPa,系統(tǒng)響應(yīng)結(jié)果如圖8所示。

圖8 目標(biāo)壓力響應(yīng)圖Fig.8 Target pressure response diagram
由圖8可見,目標(biāo)壓力為8 MPa時(shí),系統(tǒng)響應(yīng)時(shí)間為0.12 s左右,且調(diào)節(jié)過程超調(diào)量較小,基本沒有穩(wěn)態(tài)靜差。傳統(tǒng)液壓制動系統(tǒng)制動時(shí),駕駛員全力踩下制動踏板,輪缸壓力最快響應(yīng)時(shí)間一般為0.2~0.9 s,由仿真結(jié)果可以看出,目標(biāo)壓力為2.5 MPa時(shí),系統(tǒng)可以在0.07 s內(nèi)響應(yīng),目標(biāo)壓力為5 MPa時(shí),系統(tǒng)也在0.08 s內(nèi)達(dá)到預(yù)設(shè)壓力,由此可以看出本文所建制動壓力控制器可以滿足主動制動需求,且制動過程中有較好的動態(tài)和穩(wěn)態(tài)效果。
針對于路面實(shí)變的特性,要求壓力控制器能實(shí)時(shí)達(dá)到期望壓力,所以進(jìn)行增、減壓的仿真,驗(yàn)證其控制效果,并與PID控制進(jìn)行對比。
由圖9可以看出,單神經(jīng)元PID控制下壓力從0增加到4 MPa僅需0.06 s,超調(diào)量約為2.1%,幾乎沒有靜差;在減壓工況,響應(yīng)時(shí)間約為0.35 s,靜差可以忽略不計(jì)。仿真結(jié)果表明,相較于PID控制,單神經(jīng)元PID壓力控制器有更快的響應(yīng)時(shí)間,較小的超調(diào)量,并能保證基本無靜差。
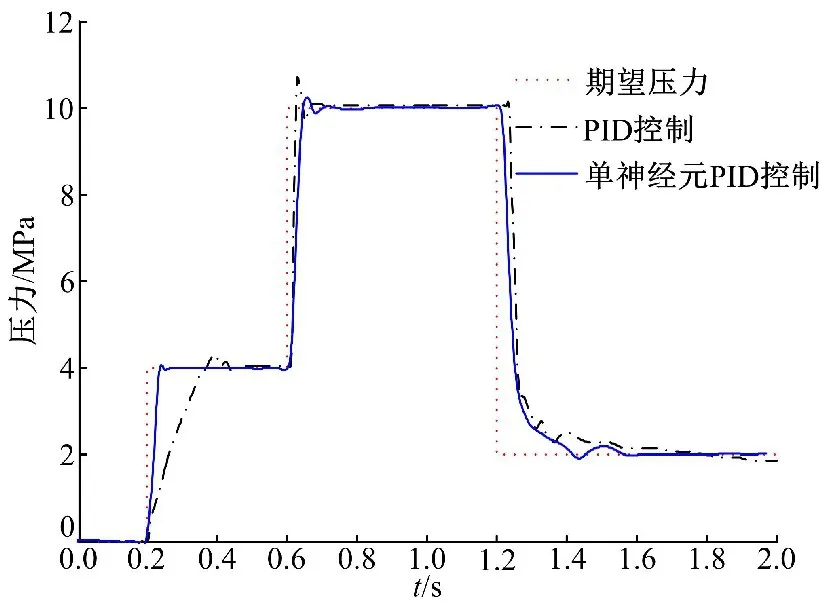
圖9 壓力控制對比圖Fig.9 Comparison of pressure control
結(jié)果表明,PID控制較為簡單易用,且響應(yīng)速度可以達(dá)到主動避撞系統(tǒng)要求,但調(diào)節(jié)過程中有較大的震蕩且有一定的穩(wěn)態(tài)靜差。相較而言,單神經(jīng)元PID控制不僅有較快的響應(yīng)速度,而且可以保證系統(tǒng)的魯棒性,擁有較好的動態(tài)和穩(wěn)態(tài)效果。
3 仿真分析
為了驗(yàn)證基于路面峰值附著系數(shù)的最大制動力系統(tǒng)的制動效果,通過CarSim/Simulink聯(lián)合仿真,利用CarSim的整車模型和精確的輪胎模型[12],在Simulink中搭建路面辨識及制動系統(tǒng)模型,并與CarSim內(nèi)的ABS進(jìn)行對比。
圖10為基于路面的最大制動力仿真模型,CarSim輸出路面辨識所需的速度、車輪轉(zhuǎn)速、車輪縱向力以及垂直載荷,通過路面辨識算法模塊計(jì)算路面峰值附著系數(shù),逆制動力模塊將峰值附著系數(shù)換算成期望制動減速度,根據(jù)期望減速度和車速計(jì)算出期望制動壓力,并輸入到單神經(jīng)元PID制動壓力控制器,得到實(shí)際制動壓力輸入到CarSim實(shí)現(xiàn)最大制動力的緊急制動。
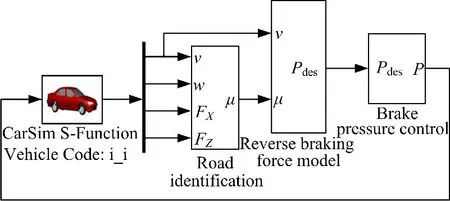
圖10 基于路面的最大制動力仿真模型Fig.10 Simulation model of maximum braking force based on road surface
為了便于區(qū)分,將基于路面制動的車輛用虛線表示,稱之為R車,也可理解為Road;將ABS制動的車輛用實(shí)線表示,稱之為B車,也可理解為ABS。
3.1 路面附著條件較好
在CarSim中設(shè)置路面摩擦因數(shù)為0.85,相當(dāng)于干水泥路面,設(shè)置車輛行駛工況:初速度為120 km/h,給ABS制動車輛設(shè)置10 MPa的制動壓力,使其實(shí)現(xiàn)最大強(qiáng)度制動。圖11、圖12為仿真結(jié)果。

圖11 速度-時(shí)間曲線Fig.11 Velocity-time curve
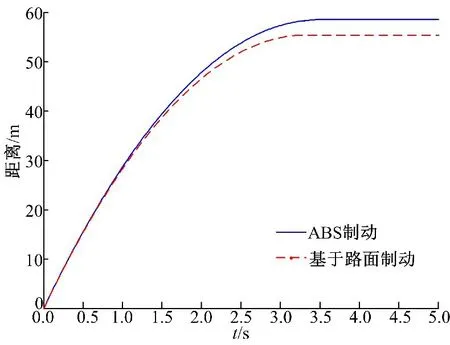
圖12 距離-時(shí)間曲線Fig.12 Distance-time curve
由圖11、圖12可知,從120 km/h到完全停止,R車用時(shí)3.3 s,制動減速度為10.1 m/s2,制動距離為55.4 m;B車用時(shí)3.5 s,制動減速度為9.5 m/s2,制動距離為58.5 m。結(jié)果表明,基于路面的最大制動力R車比ABS的B車制動時(shí)間減少了5.7%,制動減速度提高了6.3%,制動距離縮短了5.3%。
3.2 路面附著條件中等
在CarSim中設(shè)置路面摩擦因數(shù)為0.5,路面水平相當(dāng)于比濕瀝青路面差一點(diǎn),設(shè)置同樣的車輛行駛工況:初速度為120 km/h,給ABS制動車輛設(shè)置10 MPa的制動壓力,使其實(shí)現(xiàn)最大強(qiáng)度制動。圖13、圖14為仿真結(jié)果。

圖13 速度-時(shí)間曲線Fig.13 Velocity-time curve
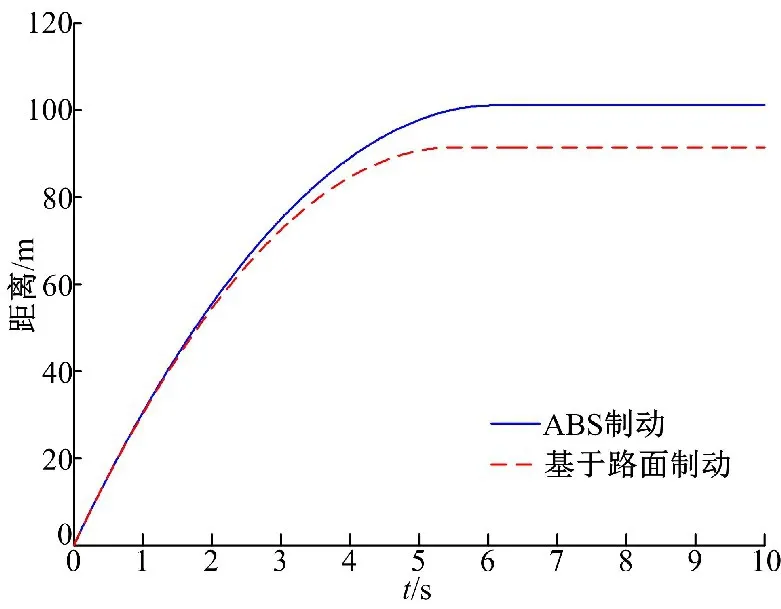
圖14 距離-時(shí)間曲線Fig.14 Distance-time curve
由圖13、圖14可知,從120 km/h到完全停止,R車用時(shí)5.5 s,制動減速度為6.06 m/s2,制動距離為91 m;B車用時(shí)6.1 s,制動減速度為5.46 m/s2,制動距離為101 m。結(jié)果表明,基于路面的最大制動力R車比ABS的B車制動時(shí)間減少了9.8%,制動減速度提高了11%,制動距離縮短了9.9%。
通過對比可以發(fā)現(xiàn),隨著路面附著條件的降低,R車相較于B車制動性能提高越來越明顯,這是因?yàn)樵诟街鴹l件較差的路面,最佳滑移率在10%左右,甚至以下,而ABS仍然將滑移率控制在10%~20%,所以路面條件越差,ABS制動時(shí)偏移最佳滑移率越多,制動性能下降越明顯。
3.3 路面附著條件較差
在CarSim中設(shè)置路面摩擦因數(shù)為0.2,路面條件相當(dāng)于比雪路面好一點(diǎn),為了切合實(shí)際,設(shè)置車輛行駛工況:初速度為60 km/h,同樣給ABS制動車輛設(shè)置10 MPa的制動壓力,使其實(shí)現(xiàn)最大強(qiáng)度制動。圖15~圖17為仿真結(jié)果。
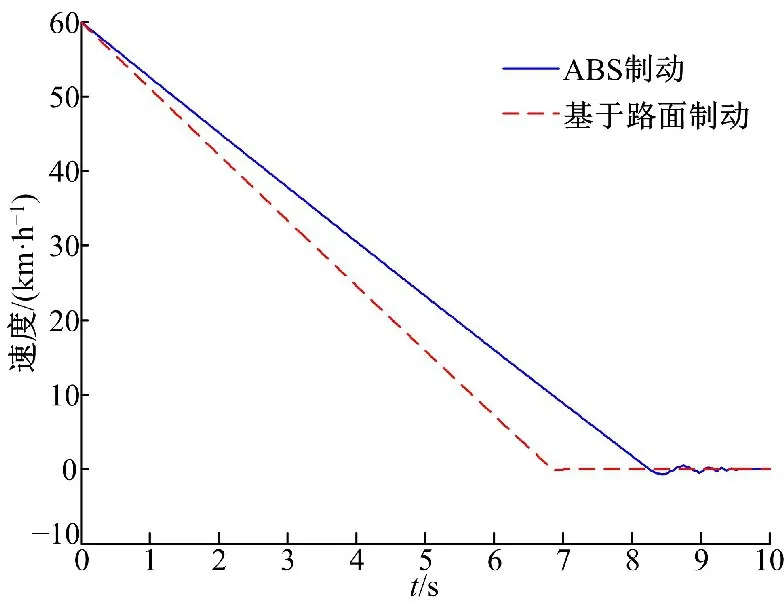
圖15 速度-時(shí)間曲線Fig.15 Velocity-time curve
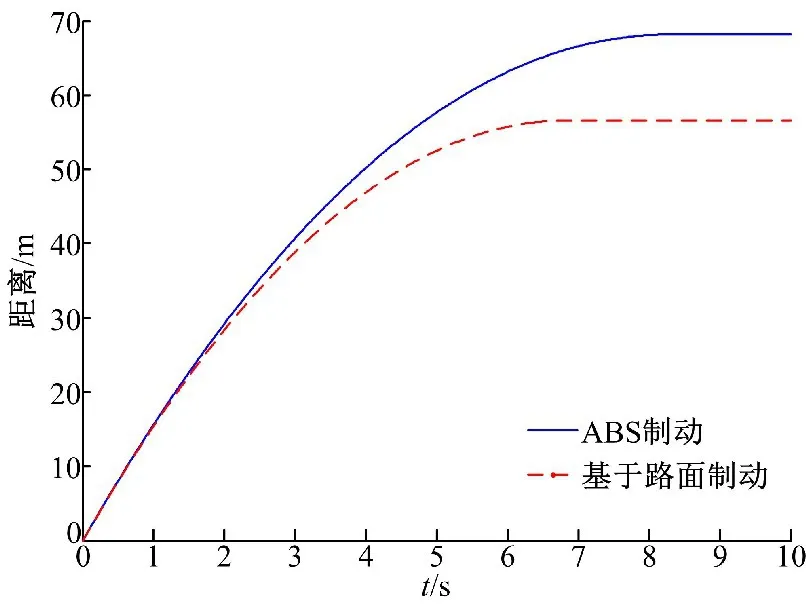
圖16 距離-時(shí)間曲線Fig.16 Distance-time curve

圖17 質(zhì)心軌跡Fig.17 Centroid trajectory
由圖15、圖16可知,從60 km/h到完全停止,R車用時(shí)6.85 s,制動減速度為2.4 m/s2,制動距離為56.6 m;B車用時(shí)8.25 s,制動減速度為2 m/s2,制動距離為68.1 m。結(jié)果表明,基于路面的最大制動力R車比ABS的B車制動時(shí)間減少了17%,制動減速度提高了20%,制動距離縮短了16.9%。
圖17為兩車制動時(shí)的質(zhì)心軌跡,可以看出R車制動時(shí)方向穩(wěn)定性較好,并未發(fā)生側(cè)滑;B車發(fā)生輕微側(cè)滑,是因?yàn)樵谳^差路面,ABS通過控制輪缸壓力增壓減壓,將四輪滑移率持續(xù)控制在10%~20%,由于延遲滯后現(xiàn)象,造成輕微側(cè)滑,最大側(cè)向位移為0.008 m,也可以忽略不計(jì)。而R車只需保壓,所以不會出現(xiàn)側(cè)滑現(xiàn)象。
4 結(jié) 論
(1)設(shè)計(jì)的路面峰值附著系數(shù)辨識算法能夠直接有效地辨識出路面的峰值附著系數(shù),誤差控制在5%左右。
(2)針對路面實(shí)變的特點(diǎn),單神經(jīng)元PID控制不僅有較快的響應(yīng)速度,而且可以保證系統(tǒng)的魯棒性,擁有較好的動態(tài)和穩(wěn)態(tài)效果。
(3)路面峰值附著系數(shù)的準(zhǔn)確辨識對改善制動性能發(fā)揮著很大的作用,結(jié)果表明,道路附著條件變差,基于路面特性的制動系統(tǒng)始終具有較好的制動性能,相比ABS制動系統(tǒng)具有更高效的制動效果。
[1]NHTSA.Trafficsafety facts 2010 annual report[R].DOTHS 810631,Washington DC,2011.
[2]Suetoml T,Kido K.Driver behavior under a collision warning system-a driving simulator study[C]∥SAE Paper,970279.
[3]Bogdevi?ius M,Vladimirov O.Efficiency of a braking process evaluating the roughness of road surface[J].Transport,2006,21(1):3-7.
[4]王潤琪,蔣科軍.ABS汽車制動距離分析與計(jì)算[J].中南林學(xué)院學(xué)報(bào),2005,25(2):70-73.Wang Run-qi,Jiang Ke-jun.Analysis and calculation of braking distance of ABS automobiles[J].Journal of Central South Forestry University,2005,25(2):70-73.
[5]Bhandari R,Patil S,Singh R K.Surface prediction and control algorithms for anti-lock brake system[J].Transportation Research Part C Emerging Technologies,2012,21(1):181-195.
[6]林棻,黃超.采用UKF算法估計(jì)路面附著系數(shù)[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2013,45(7):121-126.Lin Fen,Huang Chao.Unscented Kalman filter for road friction coefficient estimation[J].Journal of Harbin Institute of Technology,2013,45(7):121-126.
[7]Wang B,Guan H,Lu P,et al.Road surface condition identification approach based on road characteristic value[J].Journal of Terramechanics,2014,56:103-117.
[8]Jin X J,Yin G.Estimation of lateral tire-road forces and sideslip angle for electric vehicles using interacting multiple model filter approach[J].Journal of the Franklin Institute,2015,352(2):686-707.
[9]Burckhardt M.ABS und ASR,Sicherheitsrelevantes,Radschlupf-Regel system[R].University of Braunschweig,Germany,1987.
[10]鄭宏宇,王琳琳,趙偉強(qiáng),等.基于電控制動系統(tǒng)的客車制動力分配控制策略[J].吉林大學(xué)學(xué)報(bào):工學(xué)版,2015,45(2):347-351.Zheng Hong-yu,Wang Lin-lin,Zhao Wei-qiang,et al.Passenger train braking force distribution control strategy based on electronic control braking system[J].Journal of Jilin University(Engineering and Technology Edition),2015,45(2):347-351.
[11]玄圣夷,宋傳學(xué),靳立強(qiáng),等.基于多級魯棒PID控制的汽車穩(wěn)定性控制策略[J].吉林大學(xué)學(xué)報(bào):工學(xué)版,2010,40(1):13-18.Xuan Sheng-yi,Song Chuan-xue,Jin Li-qiang,et al.Vehicle stability control strategy based on multilevel robust PID control[J].Journal of Jilin University(Engineering and Technology Edition),2010,40(1):13-18.
[12]杜春臣,張文廣,周孫鋒.基于Carsim的車輛制動防抱死過程分析[J].北京汽車,2012,180(3):27-30.Du Chun-chen,Zhang Wen-guang,Zhou Sun-feng.Analysis of vehicle anti-lock braking process based on Carsim[J].Beijing Automotive Engineering,2012,180(3):27-30.
