基于無級變速器速比控制的插電式混合動力汽車再生制動控制策略
2018-03-01 05:24:13秦大同林毓培胡建軍郭子涵
吉林大學學報(工學版) 2018年2期
秦大同,林毓培,胡建軍,郭子涵
(重慶大學 汽車工程學院,重慶400044)
0 引 言
插電式混合動力汽車(Plug-in hybrid electric vehicle,PHEV)的優點在于電池容量大,純電動模式續駛里程長,且在制動或減速過程中能夠將制動能量轉換為電能存儲在電池中,提高汽車的能量利用效率[1],因此對PHEV制動過程進行研究以回收更多的制動能量是目前的研究熱點。
再生制動控制策略作為PHEV制動能量回收的關鍵技術,國內外研究學者對其進行了深入研究。Suntharalingam等[2]分析了地面附著系數與制動強度對再生制動系統能量回收率的影響,并提出了制動能量回收率最大化的控制策略。Gao等[3]提出了基于最優制動能量回收的混合動力汽車再生制動系統制動力分配策略,但未考慮電機和電池的工作效率,制動能量回收率不高。Yeo等[4,5]提出了基于電機高效發電工作的無級變速器(Continuously variable transmission,CVT)速比控制策略,實現了基于CVT速比最優控制的再生制動控制策略。宋世欣等[6]針對電動輪汽車的制動系統進行分析,提出了適用于電動輪汽車的制動能量回收策略,仿真驗證該策略能有效提高能量回收率。張俊智等[7]以一款串聯式混合動力汽車為研究對象,研究了在不同的制動力分配策略下車輛的制動能量回收率以及制動舒適性。秦大同等[8]提出了在制動過程中通過調節CVT速比來控制電機工作在高效區,以提高電機的發電效率。鄧濤等[9]考慮鎳氫電池充電效率和電機發電特性,確定了電池電機聯合高效工作曲線,制定了CVT速比控制策略及再生制動控制策略。綜上所述,國內外學者更多地考慮制定合理的控制策略以提高制動能量回收率,但未考慮到制動過程中CVT速比與整車減速產生的慣性矩的變化對駕駛員制動意圖的影響。
本文以一款裝備CVT的插電式混合動力汽車為研究對象。首先在滿足制動安全法規的前提下,基于所制定的理想再生制動力分配策略,考慮電機、電池及CVT綜合效率最優的目標要求,得到基于綜合效率最優的CVT速比控制策略,針對制動過程中由于CVT速比和車速動態變化使得實際制動強度偏離需求制動強度的問題,進一步研究傳動系統動態特性,得到系統慣性矩與駕駛制動意圖之間的關聯規律,最后以保證制動意圖的同時提高能量回收率為目標,采用離散窮舉優化,并結合綜合效率最優的速比控制策略,提出基于速比變化限制及電機協調控制的CVT速比優化控制策略。
1 理想再生制動力分配策略
1.1 整車結構與參數
表1為整車參數。整車結構如圖1所示,發動機通過離合器與ISG電機同軸布置,經過CVT和主減速器與車輪相連。制動時,離合器斷開連接,整車制動力由電機和液壓系統提供,電機制動力僅作用在前輪上。

表1 整車參數Table 1 Vehicle parameter
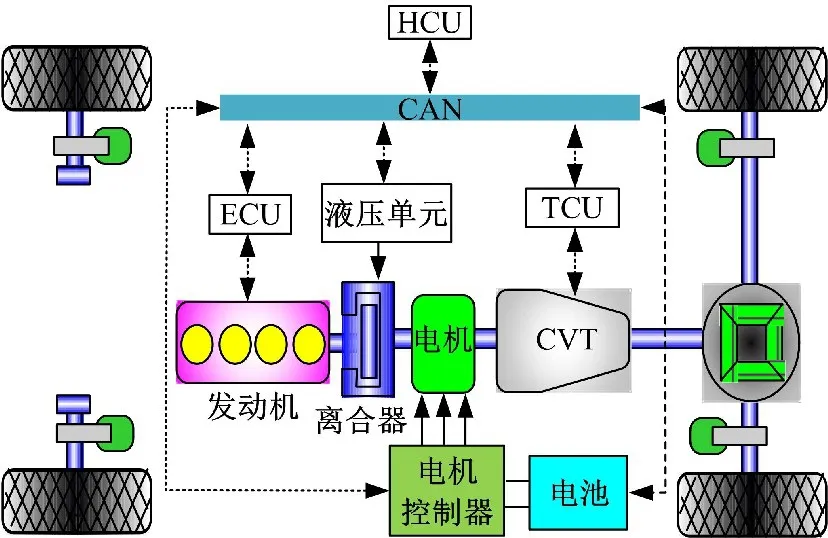
圖1 整車結構圖Fig.1 Structure of vehicle
1.2 再生制動門限值
制動過程中電機單獨制動時所能提供的最大制動強度稱之為再生制動門限值[10],為了更多地回收制動能量,再生制動門限值應取較大值,但是受到制動法規和電機制動性能的限制。
聯合國歐洲經濟委員會制定了ECE R13制動法規[11],要求附著系數φ在0.2~0.8的各種車輛的制動強度z滿足:

汽車在水平路面上制動時的受力情況為:
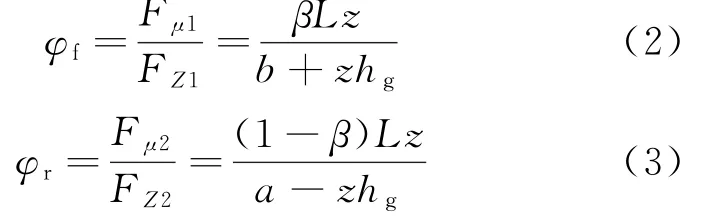
式中:φf、φr分別為前、后輪附著系數;β為制動力分配系數;Fμ1、Fμ2分別為前、后輪制動器制動力;F Z1、F Z2分別為地面對前、后輪的法向反作用力;L為軸距;a、b分別為汽車質心到前、后軸中心線距離;hg為汽車質心高度。
為了防止后輪先抱死,前輪附著系數φf應大于后輪附著系數φr,進而可得:

制動過程中當電機單獨制動時,制動力分配系數β=1,代入式(4)可得到制動法規規定的電機單獨提供的最大制動強度為0.133。
根據再生制動系統的功率流向,電機的制動性能需滿足下式:
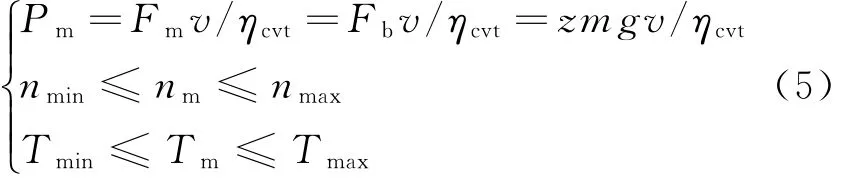
式中:Pm為電機制動功率;Fm為電機制動力;v為車速;Fb為整車制動力;ηcvt為CVT效率;nm為電機轉速;Tm為電機扭矩。
為了保證電機在制動回收時的安全運行,分析電機可提供的最大制動強度與車速之間的關系,如圖2所示。統計典型工況下的最高車速情況(見圖3),發現典型工況下的最高車速均小于100 km/h,結合圖2,可得到此時電機單獨制動時提供的最大制動強度為0.133。
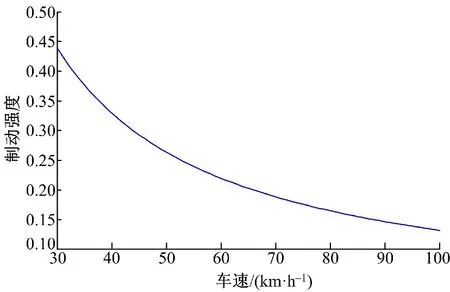
圖2 電機單獨提供的最大制動強度zm與車速v的關系Fig.2 Relationship between zm and v
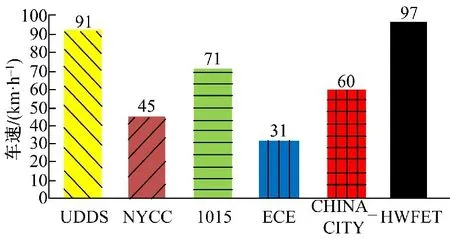
圖3 典型循環工況最高車速Fig.3 Maximum speed in typical driving cycles
綜合考慮制動法規和電機制動性能對再生制動門限值的限制,選取再生制動門限值zm=0.13,能夠在保證制動安全性的前提下更好地發揮電機回收制動能量的作用。
1.3 理想制動力分配策略
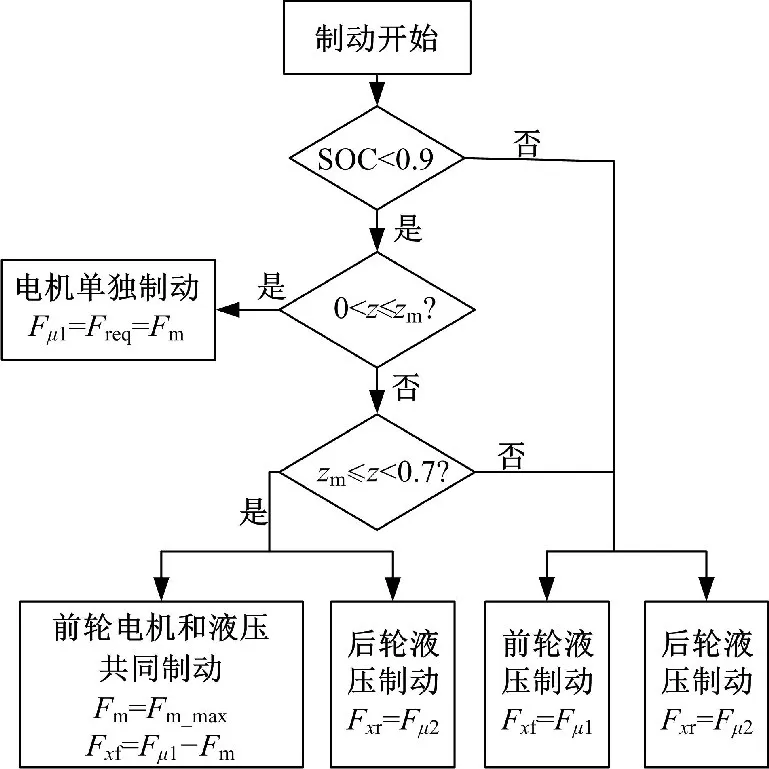
圖4 制動力分配策略Fig.4 Brake force distribution strategy
如圖4所示,在確定了再生制動門限值的基礎上,制定了理想再生制動力分配策略。由電池SOC和制動強度得到不同狀態下的電機和液壓系統所需提供的制動力。當前、后輪共同提供制動力時,前、后輪制動力按I曲線進行分配[11],其中在前軸制動力中,電機提供最大制動力,剩余不足的制動力由前輪的液壓系統進行補償。
2 基于綜合效率最優的CVT插電式混合動力汽車制動性能分析
不同車速和制動強度下的整車需求制動功率不同,根據制定的理想再生制動力分配策略,可分別得到液壓制動路徑和再生制動路徑上的制動功率,對于不同的再生制動功率,電機都存在一個轉速使得電機、電池和CVT綜合效率η=ηmηbηcvt達到最優,考慮再生制動路徑上電機、電池和CVT等工作元件的效率特性{ηm=f(nm,Tm)、ηb=f(Pb,SOC)、ηcvt=f(Tin,i)},可得到電機單獨制動模式下CVT目標速比與車速、制動強度的關系,如圖5所示。制動過程中,根據當前的制動強度和車速,得到此時的CVT目標速比,使得再生制動系統綜合效率達到最優。
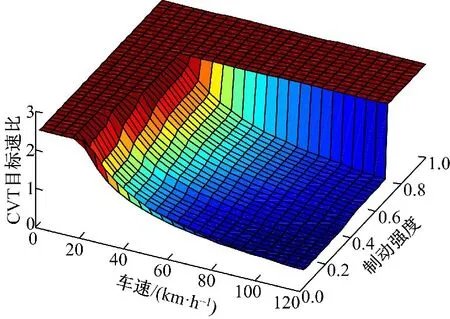
圖5 CVT目標速比圖Fig.5 CVT target speed ratio
基于穩態下綜合效率最優的CVT速比控制策略未考慮到傳動系統的動態變化對制動過程所帶來的影響,為了分析基于綜合效率最優的CVT插電式混合動力汽車的制動性能,分別在輕度制動工況和中度制動工況(初速度為100 km/h,制動強度在1 s內分別從0增加到0.1和0.3并維持到車輛停止[12])下進行仿真分析,仿真結果如圖6、圖7所示。
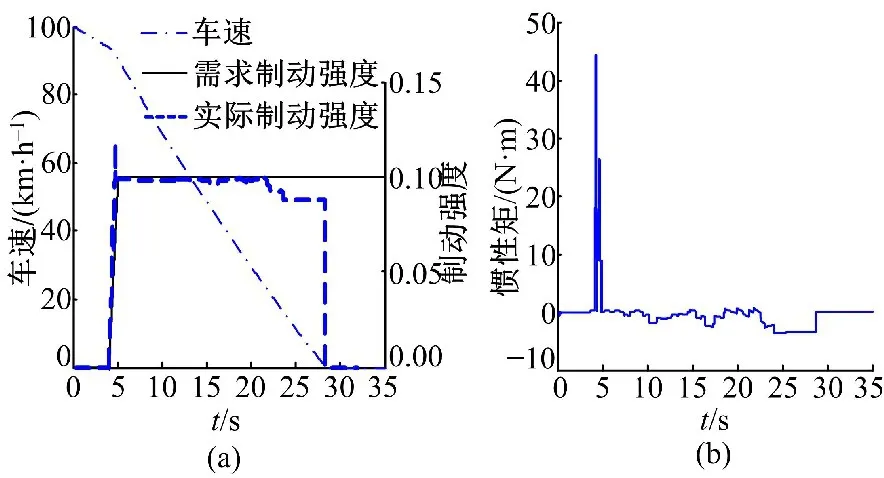
圖6 輕度制動工況的仿真結果Fig.6 Simulation results of mild braking condition

圖7 中度制動工況的仿真結果Fig.7 Simulation results of moderate braking condition
從圖6、圖7可以看出,制動強度分別從0增加到0.1和0.3的過程中,會產生很大的作用于電機軸上的慣性矩,最大慣性矩分別達到45 N·m和91N·m,導致車輛的實際制動強度比需求制動強度大,最大超調量分別達到37.78%、32.24%。在CVT速比達到最大后又由于車速下降,產生反方向的慣性矩,導致車輛的實際制動強度比需求制動強度小,最小制動強度分別為0.089、0.265,比需求制動強度小了11%、11.67%,違背了駕駛意圖。為消除慣性矩對制動過程中的不利影響,有必要對制動過程中傳動系統的動態特性進行研究,并對基于綜合效率最優的CVT速比控制策略進行修正。
3 基于速比變化限制及電機協調控制的CVT速比優化控制策略
3.1 制動過程中CVT傳動系統動態特性
CVT傳動系統的結構如圖8所示,其中,Im、Iin、Iout、Id分別為電機、CVT輸入軸、CVT輸出軸、整車的轉動慣量;ωm、ωin、ωout、ωd分別為電機、CVT輸入軸、CVT輸出軸、車輪處的角速度;Tm、Tin、Tout、Td分別為電機、CVT輸入軸、CVT輸出軸、車輪處的扭矩;icvt、io分別為CVT、主減速器的速比。
根據圖8和CVT傳動系統動力學分析有:

電機端產生的慣性矩為:

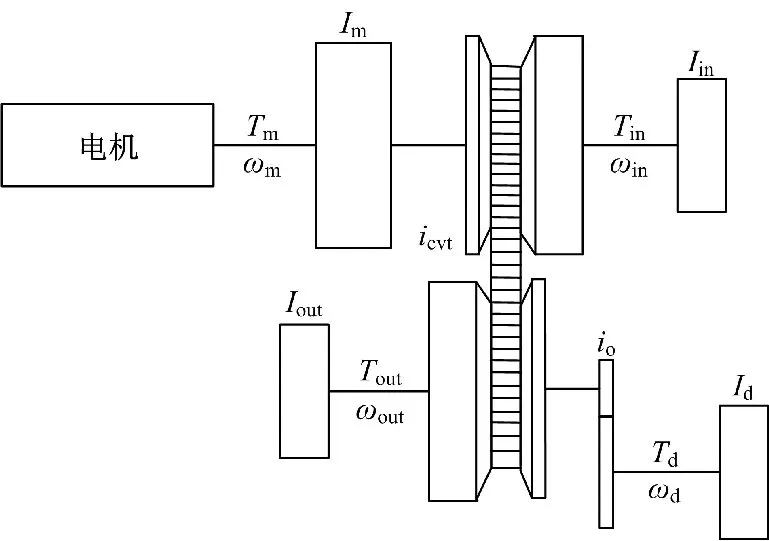
圖8 CVT傳動系統結構圖Fig.8 CVT transmission system
從式(7)可以看出,再生制動過程中電機端產生慣性矩是由CVT速比變化率和制動減速度共同引起的。結合圖6、圖7分析可知,在制動過程中由于CVT速比迅速增加引起的慣性矩使得實際制動強度大于需求制動強度;由于車速下降引起的慣性矩使得實際制動強度小于需求制動強度,違背駕駛員的制動意圖。在高速緊急制動的情況下,會出現由于CVT速比變化率過大引起作用在電機軸上的慣性矩過大,此時前輪制動力會迅速增加,甚至出現前輪抱死的現象,影響制動安全性。
3.2 CVT速比變化率控制策略
考慮制動過程中傳動系統的動態特性,電機實際提供的制動扭矩是由電機和慣性矩共同作用,即T′m=Tm-Tmi。如果仍根據綜合效率最優的CVT速比控制策略進行控制,那么產生的慣性矩會造成實際制動強度偏離需求制動強度,同時使制動系統的效率不能達到最優。所以,需要對制動過程的CVT速比變化率進行限制以減小制動過程的慣性矩,結合所制定的綜合效率最優速比控制策略,對CVT目標速比進行修正,使得電機提供適當的制動扭矩,既能滿足駕駛員需求的制動強度,同時又能回收更多的制動能量。
在不同的制動強度z和車速v下,以再生制動功率max{P′ηmηbηcvt}為目標,根據需求制動功率Pb和制定的理想再生制動控制策略,考慮傳動系統的動態特性,結合穩態下CVT和電機的最優目標運行點,得到再生制動路徑上實際的再生制動功率P′,將CVT速比變化率ψ的變化范圍限定為-2~2[13],利用離散窮舉優化方法求得最優的CVT速比變化率。優化流程如圖9所示。
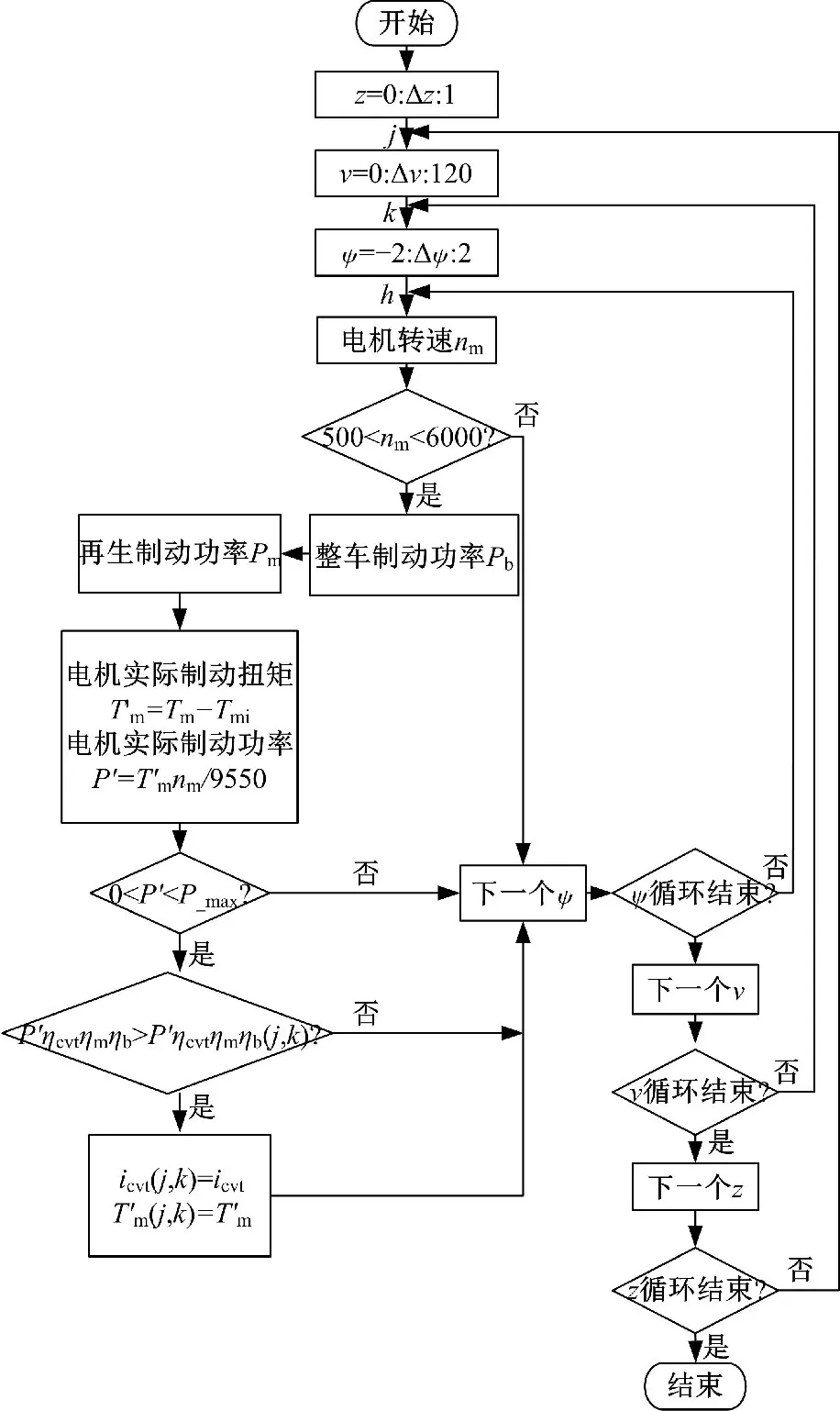
圖9 CVT速比變化率優化流程圖Fig.9 Optimization of CVT ratio change rate
根據優化得到制動時CVT最優速比變化率,如圖10所示。
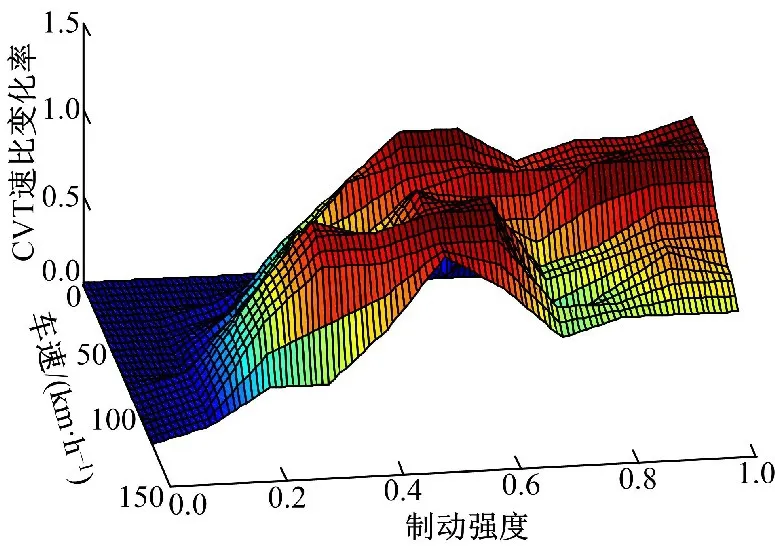
圖10 CVT最優速比變化率Fig.10 Optimal CVT ratio change rate
3.3 基于速比變化限制及電機協調控制的CVT速比優化控制策略
根據綜合效率最優的CVT控制策略和最優速比變化率可以得到修正的CVT目標速比與制動強度、車速的關系圖,如圖11所示。
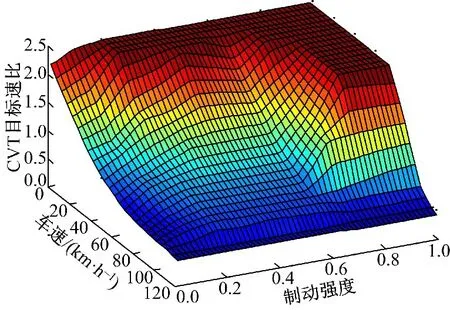
圖11 修正之后的CVT目標速比圖Fig.11 CVT target speed ratio after modification
當制動強度0≤z<0.7時,電機和液壓系統共同工作,由于CVT速比變化率的限制,CVT速比變化減緩,從而減小產生的慣性矩。當制動強度0.7≤z<1時,此時車輛被視為緊急制動,為了保證制動的安全性,CVT速比應以最快的速度達到最大值。
3.4 再生制動性能仿真分析
在輕度制動工況和中度制動工況下,對采用基于單電機效率(策略1)、綜合效率最優(策略2)和速比變化限制及電機協調控制的CVT速比優化控制策略(策略3)進行仿真分析,結果如圖12所示。
從圖12(a)可以看出,制動強度在1 s內從0增加到0.1的過程中,與采用策略1和策略2相比,采用策略3時CVT速比變化更加平緩,產生的慣性矩最大值分別從49 N·m和45 N·m減小到11 N·m,車輛的實際制動強度很好地跟隨駕駛員的需求制動強度,最大偏離量為2%。制動結束后,采用策略1,電池SOC從0.8增加到0.8056;采用策略2,電池SOC從0.8增加到0.8059;采用策略3,電池SOC從0.8增加到0.8062,分別提高了0.7%和0.3%。同時,制動過程中產生的最大沖擊度分別從12.5 m/s3、9.6 m/s3減少到1.7 m/s3。
從圖12(b)可以看出,制動強度在1 s內從0增加到0.3的過程中,產生的慣性矩最大值分別從160 N·m和91 N·m減小到22 N·m,實際制動強度較需求制動強度的最大偏離量為2.3%。制動結束后,電池SOC分別從0.8增加到0.8046、0.8049和0.8051,提高了0.6%和0.28%。同時,制動過程中產生的最大沖擊度從49 m/s3、46 m/s3減少到18 m/s3。

圖12 輕度制動工況和中度制動工況的仿真結果Fig.12 Simulation results of mild and moderate brake
4 結 論
(1)考慮制動法規和電機制動性能的限制,確定了再生制動門限值zm=0.13,制定了理想再生制動力分配策略。
(2)根據理想再生制動力分配策略,考慮電機、電池和CVT的效率特性,制定了基于綜合效率最優的CVT速比控制策略。發現在制動過程中車輛的實際制動強度偏離需求制動強度,最大偏離量達到37.78%、32.24%,違背了駕駛制動意圖。
(3)針對車輛實際制動強度偏離需求制動強度的問題,分析了制動過程中傳動系統的動態特性,得到了制動過程系統慣性矩與駕駛制動意圖之間的關聯規律。以再生制動功率為優化目標,采用離散窮舉優化方法求得了最優的CVT速比變化率,并結合綜合效率最優的CVT速比控制策略,對CVT目標速比及電機制動轉矩進行了修正,提出了基于速比變化限制及電機協調控制的CVT速比優化再生制動控制策略。
(4)在輕度制動工況和中度制動工況下進行仿真分析,結果表明,車輛的實際制動強度相對于需求制動強度的最大偏離量可控制在3%以內。與基于單電機效率和綜合效率最優的再生制動控制策略相比,采用本文設計的再生制動控制策略,有效保證了駕駛制動意圖,同時提高了制動能量回收率,并減小了車輛在制動過程中的沖擊度。
[1]Ramakrishnan R,Hiremath S S,Singaperumal M.Theoretical investigations on the effect of system parameters in series hydraulic hybrid system with hydrostatic regenerative braking[J].Journal of Mechanical Science and Technology,2012,26(5):1321-1331.
[2]Suntharalingam P,Economou J T,Knowles K.Effect on regenerative braking efficiency with deceleration demand and terrain condition[C]∥IET International Conference on Power Electronics,Machines and Drives,Brighton,UK,2010:1-6.
[3]Gao H,Gao Y,Ehsani M.A neural network based SRM drive control strategy for regenerative braking in EV and HEV[C]∥Electric Machines and Drives Conference,Cambridge,USA,2001:571-575.
[4]Yeo H,Hwang S,Kim H.Regenerative braking algorithm for a hybrid electric vehicle with CVT ratio control[J].Journal of Automobile Engineering,2006,220(11):1589-1600.
[5]Yeo H,Kim D,Hwang S,et al.Regenerative braking algorithm for a HEV with CVT ratio control during deceleration[J].British Journal of Cancer,2004,91(9):1718-1725.
[6]宋世欣,王慶年,王達.電動輪汽車再生制動系統控制策略[J].吉林大學學報:工學版,2015,45(2):341-346.Song Shi-xin,Wang Qing-nian,Wang Da.Control strategy for regenerative braking system of in-wheel motor vehicle[J].Journal of Jilin University(Engineering and Technology Edition),2015,45(2):341-346.
[7]張俊智,陸欣,張鵬君,等.混合動力城市客車制動能量回收系統道路試驗[J].機械工程學報,2009,45(2):25-30.Zhang Jun-zhi,Lu Xin,Zhang Peng-jun,et al.Road test of hybrid electric bus with regenerative braking[J].Journal of Mechanical Engineering,2009,45(2):25-30.
[8]秦大同,譚強俊,楊陽,等.CVT混合動力汽車再生制動控制策略與仿真分析[J].汽車工程,2007,29(3):220-225.Qin Da-tong,Tan Qiang-jun,Yang Yang,et al.Simulation on regenerative braking control strategy for hybrid electric vehicle with CVT[J].Automotive Engineering,2007,29(3):220-225.
[9]鄧濤,孫冬野,秦大同,等.CVT混合動力汽車再生制動系統仿真[J].機械工程學報,2009,45(9):214-220.Deng Tao,Sun Dong-ye,Qin Da-tong,et al.Regenerative braking simulation for hybrid electric vehicle with continuously variable transmission[J].Journal of Mechanical Engineering,2009,45(9):214-220.
[10]Gao Y,Ehsani M.Electronic braking system of EV and HEV-integration of regenerative braking,automatic braking force control and ABS[C]∥SAE Paper,2001-01-2478.
[11]余志生.汽車理論[M].5版.機械工業出版社,2009.
[12]Yang Y,Zou J,Yang Y,et al.Design and simulation of pressure coordinated control system for hybrid vehicle regenerative braking system[J].Journal of Dynamic Systems Measurement&Control,2014,136(5):051019.
[13]郝允志,孫冬野,林毓培,等.CVT速比響應特性的實驗研究及其應用[J].汽車工程,2014(7):879-884.Hao Yun-zhi,Sun Dong-ye,Lin Yu-pei,et al.An experimental study on CVT ratio response characteristics and its application[J].Automotive Engineering,2014(7):879-884.
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
