基于MIMO天線陣列的三維雷達探測
2018-02-28 11:19:18曹申藝付云起孫占山張雪松谷磊
電子技術與軟件工程 2018年21期
曹申藝 付云起 孫占山 張雪松 谷磊
摘要
本文提出了一種基于MIN天線陣列的三維探測雷達系統。目標的三維位置可以由距離、速度、方位角和高度來決定。本文提出了一種利用動目標探測(MTD)和數字波束形成(DBF)同時獲取目標三維信息的MIMO天線陣列。此外,本文利用所提出的信號處理方法解決了多目標情況下三維信息之間的不匹配問題并且降低了誤警概率。通過仿真驗證了該方法的正確性。
【關鍵詞】三維探測 MIMO MTD DBF 多目標
1 引言
近年來,隨著自動避碰雷達安全系統的普及,三維雷達探測技術得到了極大的發展。平面陣列、相控陣和機械掃描天線陣是實現三維探測的最常用方法,但這些天線系統的復雜性和成本較高。本文提出一種包含3個發射天線和2N個接收天線的時分多路復用(TDM)MIMO陣列,在水平和垂直兩個維度都實現了1×2n探測效果。
一個目標的距離和速度可以通過將動目標探測(MTD)應用于接收天線的差頻信號獲得,二維的角度可以通過數字波束形成(DBF)確定,從而可以直接確定目標的三維信息。但是,在多目標情況下,一個目標的方位角和高程信息可能存在不匹配問題,例如兩個目標的二維角度可能是(θ1,φ1),(θ2,φ2)也可能是(θ1,φ2),(θ2,φ1)因此產生虛警或者漏警的情況。本文提出了分別配對距離一速度、距離-角度以及速度一角度,合成目標三維信息的信號處理方法。
2 MIMO天線陣列
設計MIMO陣列是為了在低系統成本的情況下提高角度分辨率。利用調頻連續波(FMCW)模式,通過混合發射和接收信號來獲取差頻信號,差頻信號同時包含距離、速度和角度信息。當對MIMO虛擬陣列的差頻信號進行DBF確定二維角度時,僅通過一個差頻信號就可以得到距離和速度。
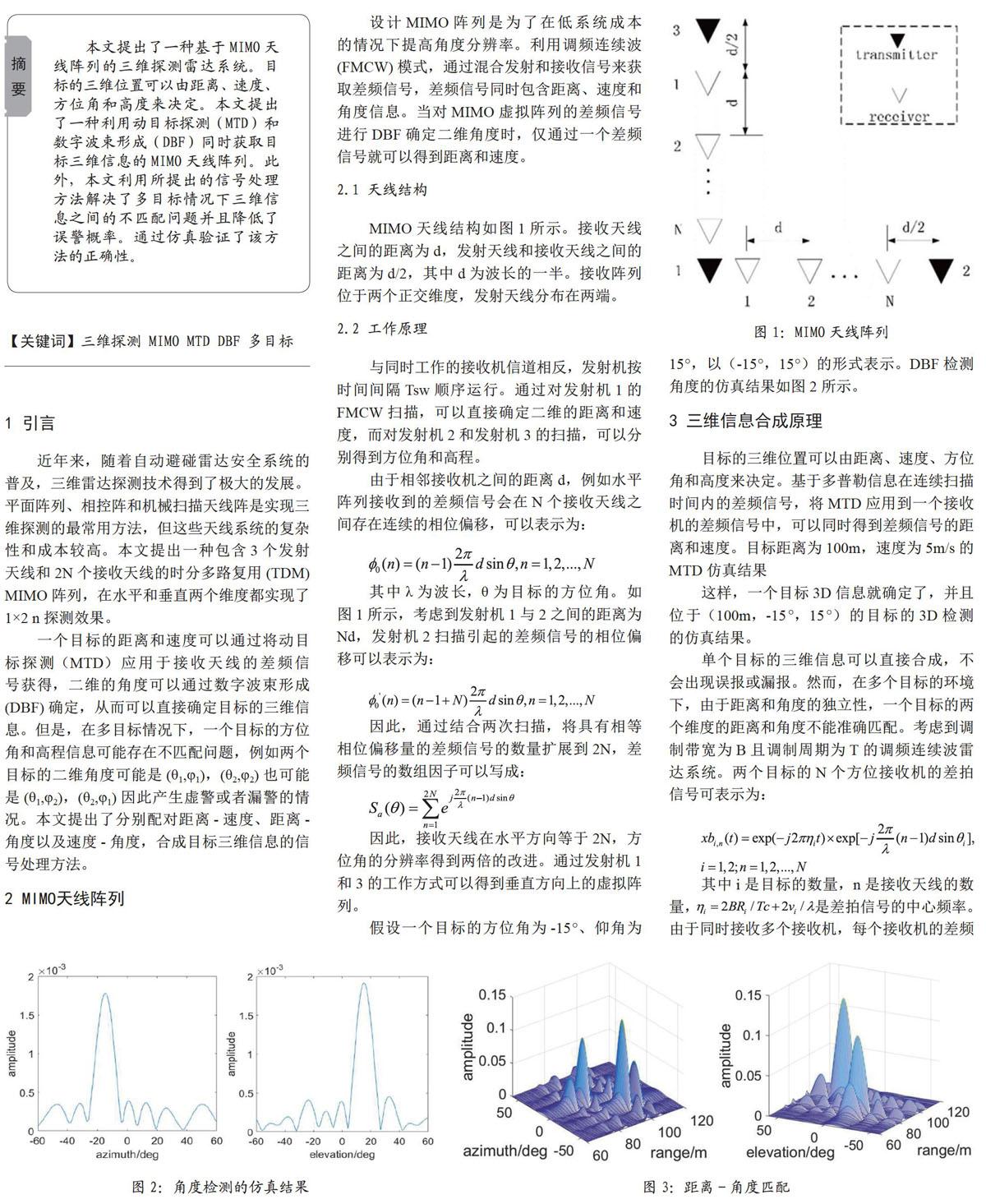
2.1 天線結構
MIMO天線結構如圖1所示。接收天線之間的距離為d,發射天線和接收天線之間的距離為d/2,其中d為波長的一半。接收陣列位于兩個正交維度,發射天線分布在兩端。
2.2 工作原理
與同時工作的接收機信道相反,發射機按時間間隔Tsw順序運行。通過對發射機I的FMCW掃描,可以直接確定二維的距離和速度,而對發射機2和發射機3的掃描,可以分別得到方位角和高程。
由于相鄰接收機之間的距離d,例如水平陣列接收到的差頻信號會在N個接收天線之間存在連續的相位偏移,可以表示為:
其中λ為波長,θ為目標的方位角。如圖1所示,考慮到發射機1與2之間的距離為Nd,發射機2掃描引起的差頻信號的相位偏移可以表示為:
因此,通過結合兩次掃描,將具有相等相位偏移量的差頻信號的數量擴展到2N,差頻信號的數組因子可以寫成:
因此,接收天線在水平方向等于2N,方位角的分辨率得到兩倍的改進。通過發射機I和3的工作方式可以得到垂直方向上的虛擬陣列。
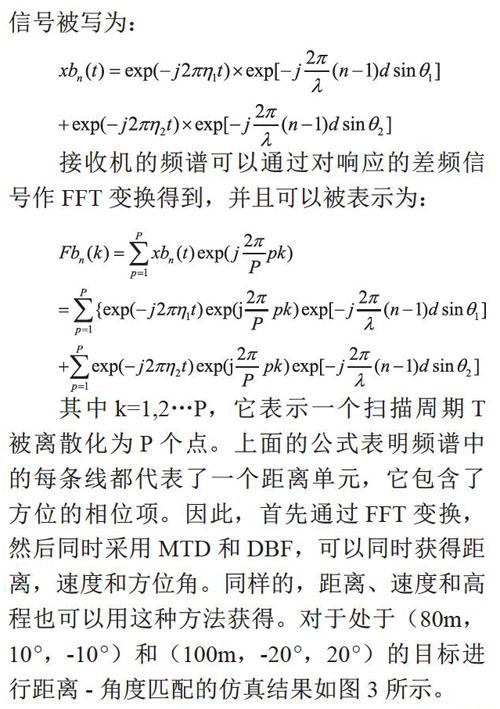
假設一個目標的方位角為-15°、仰角為15°,以(-15°,15°)的形式表示。DBF檢測角度的仿真結果如圖2所示。
3 三維信息合成原理
目標的三維位置可以由距離、速度、方位角和高度來決定。基于多普勒信息在連續掃描時間內的差頻信號,將MTD應用到一個接收機的差頻信號中,可以同時得到差頻信號的距離和速度。目標距離為100m,速度為5m/s的MTD仿真結果
這樣,一個目標3D信息就確定了,并且位于(100m,-15°,15°)的目標的3D檢測的仿真結果。
單個目標的三維信息可以直接合成,不會出現誤報或漏報。然而,在多個目標的環境下,由于距離和角度的獨立性,一個目標的兩個維度的距離和角度不能準確匹配。考慮到調制帶寬為B且調制周期為T的調頻連續波雷達系統。兩個目標的N個方位接收機的差拍信號可表示為:
其中i是目標的數量,n是接收天線的數量,ηi=2BPi/Tc+2vi/λ是差拍信號的中心頻率。由于同時接收多個接收機,每個接收機的差頻信號被寫為:
接收機的頻譜可以通過對響應的差頻信號作FFT變換得到,并且可以被表示為:
其中k=1,2…P,它表示一個掃描周期T被離散化為P個點。上面的公式表明頻譜中的每條線都代表了一個距離單元,它包含了方位的相位項。因此,首先通過FFT變換,然后同時采用MTD和DBF,可以同時獲得距離,速度和方位角。同樣的,距離、速度和高程也可以用這種方法獲得。對于處于(80m,10°,-10°)和(100m,-20°,20°)的目標進行距離一角度匹配的仿真結果如圖3所示。
可以看出,距離一方位和距離一俯仰分別實現了精確匹配。
事實上,由于距離與二維角度不具備相關性,所以會出現多目標的距離相同,單目標的方位和高程可能出現不匹配問題的特殊情況。為了實現多目標情況下三維信息的精確匹配,本文提出了一種信號處理方法,分別在二維空間下對距離一速度,距離一角度和速度一角度進行匹配,從而可以合成每個目標的三維信息。
首先考慮N個方位接收機。假定調頻連續波雷達發送K個掃描周期,并且每個周期中的差頻信號的采樣點是P。對每個周期的N個差頻信號按順序應用FFT變換,獲得具有N×K個周期的距離譜。距離譜可以被寫為SRn(K×P)。
然后將MTD應用到距離譜的K個周期的同一距離單位,以便獲得速度譜Svn(K×P)。最后,將DBF應用于N個接收機的同一速度頻譜單元,就能獲得與一個目標的唯一速度相對應的方位信息。速度一仰角匹配結果可以以相同的方式獲得。
二維速度和角度實現了精確匹配,一個目標的速度可以稱為方位角和仰角的相關性,從而可以專門合成三維信息。
4 結論
本文提出了一種三維檢測雷達系統來精確合成一個目標的三維信息。為了解決距離,方位角和仰角之間的不匹配問題,該工作分別實現了距離-速度,距離-角度和速度-角度匹配,從而使三維信息可以獨立合成。本文所提出的信號處理方法通過仿真進行了驗證。
參考文獻
[1]Harter M,Chaudhury S,Ziroff A,etal.Realization of an innovative3D imaging digital beamformingradar system[C]//2011 icee cieinternational conference on radar,2011:186-189.
[2]Barrick D E,Lipa B J,Lilleboe PM,et al.Gated FMCW DF Radar AndSignal Processing For Range/Doppler/Angle Determination[J].1994.
