機器人底盤搭載局放技術應用
2018-02-25 11:54:22高磊齊振忠李育靈寧晉峰王嬋瓊
電子技術與軟件工程 2018年11期
關鍵詞:技術應用
高磊 齊振忠 李育靈 寧晉峰 王嬋瓊
摘要 科學技術的不斷發展,使得我國進入了自動化的科技時代。現如今,我國的機器人研發技術逐漸走向成熟,由最初的只為軍事化戰略服務,但現在的家用服務以及學習機器人等,這證明了我國機器人研發取得了巨大的進步。在機器人研發生產的過程中,其底盤技術的設計極為關鍵。
[關鍵詞]機器人 底盤搭載 局放技術 技術應用
近年來,社會的發展逐漸趨于社會化,以往曾創想的機器人時代即將到來。在國外,早已經有多類及其人被研發及投入生產及銷售使用。例如,智能服務類機器人、玩具機器人以及家用機器人等。在國內,也有諸多機器人已經逐漸開始投入生產及使用。文章依據對其底盤搭載局部技術的介紹,提出的其技術應用的重點探究,對我國機器人的研發工作具有理論性的意義,對國內機器人事業在國際市場上獲得的競爭優勢具有現實性的指導意義。
1 機器人底盤搭載局放的相關技術
1.1 模塊化技術
一般的工業或者是農業機器人其體積偏大,致使其在生產、安裝以及運輸的過程中都會受到體積的影響,而在后期的保養與維修上也會存在諸多困難。對于此類問題的解決,具體的方法如下:
(1)創建優秀的框架,無論是大型的機器人,還是小型的機器人,其框架的設計均是需要具有一定的科學布局的,其走線必須設計合理,才可能使其具有較好的穩定性。
(2)模塊設計,此為底盤設計內容之一。在對機器人進行生產的過程中,其每一部分的設計均是有模塊的,且每一模塊層次分明,可拆卸,可更新,功能也均是具有獨特性的。對于同種產品的機器人,其模塊是可以相互更換的,依據模塊的設計,最終可以完成底盤搭載設計。良好的模塊技術,可對機器人的生產產生重要的影響,利于其模塊理念的形成。
1.2 局放模塊技術
局放模塊技術,其是底盤搭載技術的核心,主要涉及到的是驅動機械臂,搭載局放技術以及局放電檢測等。其具體的設計要求如下.
(1)定位,現代機器人的設計,設計人員對于其定位功能的設計十分重視。
(2)機器人的機械性動作設計,如手臂的伸出與收回等。
(3)視覺的連動性設計,機器人與人類身體的結構功能是相類似的,其本身也具有視覺的設計,而在其視覺的設計當中,其連動性的設計至關重要,該項技術的重點在于傳感器的設計與調整。
2 機器人底盤搭載局放技術應用難點解析
2.1 優化機械設計
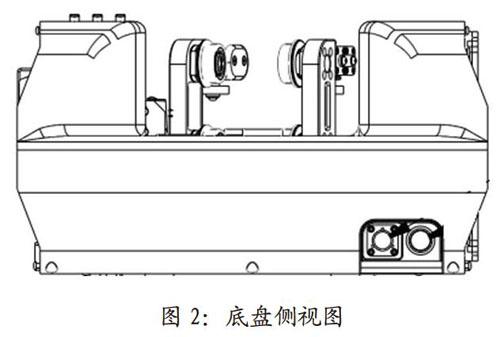
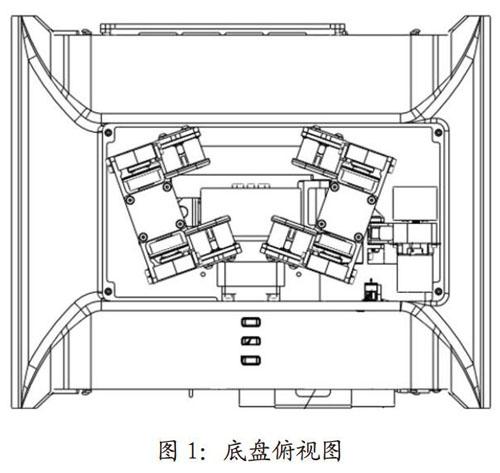
優化技術設計,其屬于機器人自平衡技術的內容之一。在設計底盤時,其機械零件間的誤差大小極為重要,誤差值越小,則其機械間的協調性便會越高,便更利于其底盤的穩定性。零部件不同,線性排布也會存在不同,其中,底盤的線性排布十分重要,尤其是其與底盤軌道間的契合程度。圖1、圖2,是底盤的側、附是視圖,在垂直方向,依靠驅動力以及重力,可以使底盤與軌道緊密貼合。在水平方向上,底盤既需要和軌道的側面進行貼合,又需要與其保持一定的空隙,利于確保機器人運行穩定。
2.2 機器人底盤搭載軟件控制
機器人的底盤搭載軟件控制主要包括的機械臂的伸縮控制、機器人底盤垂直升降的控制以及機器人水平移控制。機器人底盤搭載軟件控制涉及到空間三維運動向量。從機器人底盤搭載軟件控制的角度出來,為了確保機器人在運動的過程中,能夠在確保自由度的前提下,對其零部件進行結構上的補充,從而提升穩定性。機器人底盤搭載軟件的控制,應實現主動輪接觸面積大、負載大以及重心低的特點,從而提升防滑能力,對此,應提升底盤搭載軟件控制的水平,從而確保及其人底盤搭載軟件控制的質量。
2.3 結構與平衡間的關系
機器人在執行命令的過程中,運動的控制需要與機器人的體態特征情況以及運行命令的和任務的分類相結合,只有這樣才能有效的提升機器人運動的穩定性。在機器人底盤搭載局放技術的應用過程中,需要確保其日圖案件系統能夠針對不同的巡視位置進行不同的運動的速度,包括機器人運動的巡視的類型以及巡視點的數量。此外,機器人的體態特征也是機器人運動速度控制的重要因素之一。
3 結論
言而總之,據相關人員的介紹,對于機器人的設計,其底盤搭載技術的應用的關鍵,機器人之所以能夠站穩,其功勞均歸于底盤搭載技術設計的科學性與合理性。而在其底盤設計的工作中,其設計的相關技術有諸多種。而每一種技術其在施工的過程中,都是具有一定的技術難點的。文章針對其底盤設計具有模塊化技術及局放模塊技術等,提出了優化機械設計、機器人底盤搭載軟件控制以及結構與平衡間的關系等難點探析,希望能夠為機器人底盤的設計提供幫助。
參考文獻
[1]王浩,工業機器人技術的發展與應用綜述[J].中國新技術新產品,2018,21(03):109-110.
猜你喜歡
新媒體研究(2016年20期)2016-12-02 19:12:46
中國新技術新產品(2016年22期)2016-11-29 06:04:22
商情(2016年40期)2016-11-28 11:05:43
法制與社會(2016年30期)2016-11-24 17:45:48
電腦知識與技術(2016年26期)2016-11-24 16:21:39
科學與財富(2016年15期)2016-11-24 14:29:54
法制博覽(2016年11期)2016-11-14 10:44:13
數字技術與應用(2016年9期)2016-11-09 23:18:52
中國科技博覽(2016年22期)2016-11-01 18:30:10
電腦知識與技術(2016年21期)2016-10-18 22:33:02
