LiDAR點云數據分割方法的比較分析
2018-02-14 12:49:08李雅盟李朝奎陳奇褚楠
數字技術與應用 2018年10期
李雅盟 李朝奎 陳奇 褚楠

摘要:目前點云數據分割又分為基于面域、基于邊界及混合三大類方法。與之前的方法不同,本文通過比較各類點云數據分割算法,得出各類分割算法的優缺點,并在實驗過程中總結出點云數據在濾波、分類中的相關性,提出一種基于分類與分割迭代的分割算法。
關鍵詞:點云;分割;比較分析
中圖分類號:TN958.98? ? 文獻標識碼:A? ? 文章編號:1007-9416(2018)10-0000-00
激光雷達測量技術(LiDAR)以其觀測精度高、作業效率高等優點,已在三維建模、森林資源管理、海岸侵蝕檢測中得到廣泛應用[1]。其中數據分割是點云數據生成柵格數據的關鍵環節。現存的點云數據分割算法主要分為基于邊界、基于面域及混合分割算法這三大類,根據應用需求的不同,選取相應的算法進行數據分割[2,3]。
通過總結點云數據處理過程中的各個環節之間重要的相互關系,提出了一種基于分類與分割迭代的分割算法。
1 LiDAR點云分割算法的比較分析
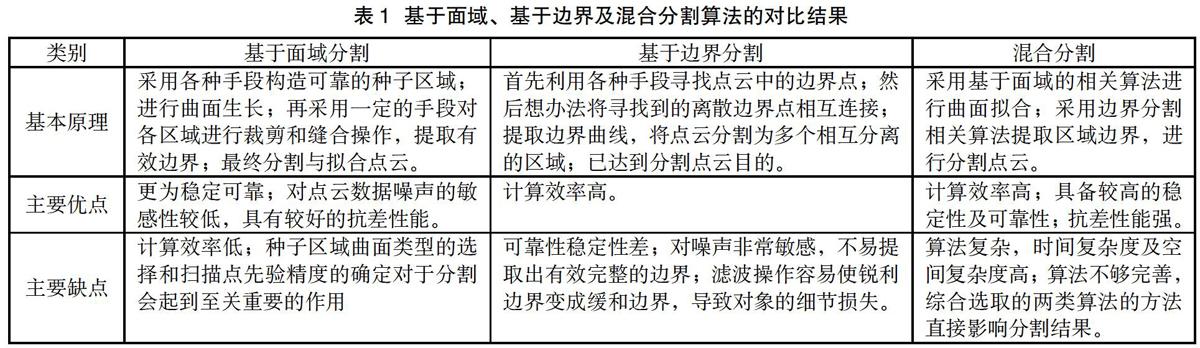
一般來說,點云數據分割算法可以分為基于邊界的算法和基于面域的算法兩大類。前者主要著眼于提取點云中代表不同曲面間邊界的掃描點,然后根據得到的邊界分割點云數據。而后者則主要著眼于尋找點云中具有相同屬性的掃描點,構成可靠種子區域,然后對這些種子進行生長,最終達到分割點云數據的目的。很多研究人員綜合使用了上述兩種方法進行點云分割,即混合算法。其中基于面域的分割算法,又分為高級特性及掃描點聚類算法。
本實驗通過對現有的點云分割算法,得到相應的實驗結果,并結合算法思想,得到了基于面域、基于邊界及混合算法的對比結果(見表1),基于面域的高級特性及掃描點聚類的對比結果(見表2)。
2 基于分類與分割迭代的分割算法
目前存在的算法都是基于面域或基于邊界,且各種混合算法也只是為了得到一種基于邊界及基于面域分割算法的最優組合,盡管有些混合算法達到了較好的分割結果,但針對不同的數據處理目的,算法不一定適用。
但是通過一系列數據處理實驗,不難發現點云數據分類可能會直接影響到數據分割的精度,而這種影響又是相互的且線性相關。由于點云數據分割的目的就在于將空間劃分為不同的區域,方便之后分門別類的對點云數據進行表面重建、三維建模等。所以點云數據的分割也直接影響到之后的表面重建工作。
基于以上原理及現存的算法總結,本文提出了一種將點云分類與分割迭代的新型算法。
2.1 基本原理
基于分類與分割迭代的分割算法的基本原理如下:
(1)首先對每個激光腳點生成小鄰域;
(2)再將各個小鄰域進行生長,屬性相同的鄰域進行合并,得到粗分割結果;
(3)然后對粗分割結果使用最大似然法進行粗差剔除,去除分割碎片.使得該算法具備很強的抗差能力;
(4)粗分割后,在各個類別中去除可靠性低于70%的種子,并選取可靠性最高的中心種子進行分門別類的生長,得出細分割結果;
(5)判斷分割精度是否滿足要求,若不滿足則轉到第四步;若滿足則得到最終的分割結果。
2.2 算法優勢
基于分類與分割迭代的分割算法是在總結點云數據處理過程中分類與分割的相關程度及其特點的基礎上建立的,通過運用點云數據分類與分割過程中相互之間的影響,得出的一類新型算法。
該算法通過將點云數據的分類及分割過程迭代進行,克服了點云數據分類與分割中遇到的分類自動化程度低、分割效果差等缺點,可以大大縮減LiDAR后處理過程中的成本。
此外,該類算法通過使用聚類生長算法進行生長,具備抗差能力強、穩定性可靠性高、思路簡單明了、適用性強等優點。
3 結語
分門別類總結現存的點云數據分割主流算法,得到各類算法的基本原理、優缺點,對于我們之后的學習工作有很好的導向作用。在實驗過程中,通過發現點云數據分類、數據分割、表面重建環節的相關性,總結點云數據處理過程中各個環節的相互作用,提出一種基于分割與分類相互迭代的分割算法。該算法凌駕于其他三類算法,從數據處理環節鏈的角度,動態處理數據,能夠同時達到數據分類與數據分割的目的,大大簡化數據處理的復雜度,提高分類與分割處理的精度,有效縮短工作時間,適應性強。
參考文獻
[1]Chen Z, Gao B, Devereux B. State-of-the-Art: DTM Generation Using Airborne LIDAR Data[J].Sensors,2017,17(1):150.
[2]Bose S K, Biswas K K, Gupta S K. An integrated approach for range image segmentation and representation[J].Artificial Intelligence in Engineering,1996,10(3):243-252.
[3]Kaveti S, Teoh E K, Wang H. Second-order implicit polynomials for segmentation of range images[J].Pattern Recognition,1996,29(6):937-949.
The Compare and Analysis of LiDAR Data Segmentation Methods*
LI Ya-meng1,2, LI Chao-kui1△, CHEN Qi1, CHU Nan1
(1.National-local Jo int Engineering Laboratory of Geo-Spatial Information Technology, University of Science and Technology, Xiangtan Hunan? 411201;
2.School of Resource Environment and Safety Engineering, Hunan University of Science and Technology, Xiangtan Hunan? 411201)
Abstract: LiDAR data segmentation methods are divided into three categories, including based on domain, based on the boundary and mixed. Different from previous methods, it is concluded that the advantages and disadvantages of all kinds of segmentation algorithms though comparing all kinds of LiDAR data segmentation methods. And summing up the point cloud data in the experimental process, the correlation among the various steps in processing, put forward a segmentation algorithm based on alternates of classification and segmentation.
Key words: point cloud; segmentation; comparative analysis
