區外故障引起的發電機功率突降保護誤切機動作分析
2018-02-08 01:33:20劉亞南唐一銘曹海歐韓葉松
電力工程技術 2018年1期
蔣 琛, 劉亞南, 唐一銘,曹海歐, 韓葉松
( 1. 江蘇方天電力技術有限公司,江蘇 南京 211102;2. 國網江蘇省電力有限公司,江蘇 南京210029;3. 江蘇國信揚州發電有限責任公司,江蘇 揚州225131)
0 引言
目前,江蘇省內新建汽輪發電機組出線多采用“同桿并架”的設計方式,可以節省大量投資。但當對側變電站發生母線故障或者線路開關偷跳時,將直接導致發電機組功率無法送出,此時若發電廠未設置功率突降保護或超速保護不動作,極易造成汽輪機超速、發電機變壓器組過電壓等惡劣后果,這對發電廠安全生產構成重大威脅。因此,功率突降保護裝置被廣泛應用以解決該問題[1-3]。
隨著國內大型機組日趨增多,發電機組與電網之間的聯系也越來越緊密。如何提高機組和電網發生異常或故障時機網之間的協調能力,提高電廠繼電保護、熱工技術,提升設備的穩定性就成了發電技術的一個新課題[4-7]。
文中針對江蘇某電廠送出線路區外故障,引起功率振蕩,導致機組全停事件進行原因分析,闡述防范措施,為解決國內機組可能存在的類似隱患提供了合理化建議和改進思路。
1 設備概況與事件經過
江蘇某電廠2臺600 MW機組正常運行,升壓站采用雙母線接線方式,送出線為4條220 kV線路,母聯開關正常合環運行。機組汽輪機數字電液控制系統(digital electric hydraulic control system,DEH)采用西門子T3000控制系統,通過數字計算機、電液轉換機構、高壓抗燃油系統和油動機控制汽輪機主汽門、調節汽門的開度,實現對汽輪機組轉速和負荷的實時控制。
機組送出線路區外,電網某處發生B相接地故障,30 ms后單相接地消失,之后120 ms衍變為三相短路。因故障線路未裝設全線速動保護,故三相故障后后備距離保護II段延時300 ms才動作切除故障,致使整個故障持續時間為450 ms。
因三相故障持續時間較長,造成電網負荷波動較大,波動過程持續3個周期,歷時2.67 s左右。系統波動造成發電機機端二次相電壓最低至36 V(額定電壓的62%)左右,主變高壓側二次相電壓最低至26 V(額定電壓的45%)左右。整個過程中發電機端二次電壓的最大變化幅度超過27 V,主變高壓側二次電壓的最大變化幅度超過40 V。發電機端二次電流最高達到8.8 A(額定電流為4.23 A),超過額定電流2倍。
在機端電壓波動過程中,廠用電電壓也隨之波動,使鍋爐給煤機跳閘,導致鍋爐主燃料跳閘(main fuel trip,MFT)。此外,因發電機功率變送器存在傳變周期與DEH刷新頻率不匹配且波形畸變的情況,故系統振蕩時,滿足汽機快控功能(又稱負荷干擾控制功能,簡稱KU)動作條件,使得調門快速關閉。當機組有功功率降至發電機額定功率的12%以下時,功率突降保護動作停機。
2 原因分析
2.1 給煤機變頻器控制回路
給煤機變頻器控制回路電源使用廠用400 V系統,由變比為380 V/115 V的穩壓變供電。當系統發生三相故障時,因發電機機端電壓降到額定電壓的62%,380 V電壓降至236 V,致使給煤機變頻器控制回路中的1ZJ繼電器線圈電壓降至67 V以下,低于1ZJ繼電器動作值(70.2 V),其結果是變頻器發給煤機停運信號,5臺運行中的給煤機同時發停運信號,致使燃料消失保護動作啟動鍋爐MFT,根據正常爐-機-電跳閘動作邏輯,鍋爐MFT動作后啟動汽機跳閘,汽機跳閘動作后,電氣逆功率保護動作全停。
2.2 功率變送器
該電廠采用傳統的模擬式有功功率變送器,采集發電機電壓、電流量,利用時分割乘法器原理產生模擬量功率信號[8-10]。有功功率變送器的功率信號送至DEH系統,作為其測量及控制的基礎。
由于國標對于模擬式有功功率變送器的暫態性能(電網發生故障時變送器輸出量的特性)并沒有要求,故變送器產品暫態性能較差,容易發生功率畸變[11-12]。畸變原因可能是故障電流過大或含有的非周期分量導致變送器內小電流互感器飽和,從而使參與計算的電流量畸變,變送器輸出信號放大了實際功率變化值。
由于控制系統波形無法調取,故從電廠DEH曲線推斷得:在系統振蕩過程中,發電機實際輸出功率的變化并沒有達到DEH中關于調門快控的規定值,但由于變送器輸出功率畸變,DEH監測到機組有功功率大于功率跳變限值,誤以為滿足KU觸發條件(①突然出現負荷干擾大于負荷跳變限值,②負荷控制偏差大于設定值,兩者同時滿足),從而導致調門快速關閉,發電機輸出功率突降。
2.3 功率突降保護
當汽輪機發生正功率突降時,若動力原因造成突降,則鍋爐及汽機保護先動作,然后機跳電邏輯實現發變組保護出口全停;若功率送出系統原因引起功率突降,則由送出系統(一般是線路保護)遠方投切回路聯跳發變組保護實現出口全停。
功率突降保護就是在發電機突然甩負荷或者由于輸電線路故障,發電機無法輸出功率時,迅速動作關閉主汽門、滅磁、解列,以防止發電機組超速、升壓,從而保證發電機組汽輪機、鍋爐等主設備安全。該電廠在鍋爐MFT觸發爐跳機過程中,功率突降保護動作出口條件滿足,觸發出口動作跳閘,實現了機組安全停機。
功率突降保護邏輯判據分為啟動判據、動作判據、閉鎖條件3部分。
2.3.1 啟動判據分析
當發電機功率大于保護投入功率定值時,保護功能投入。啟動判據由電壓突增判據和頻率突增判據構成,邏輯如圖1所示。圖中:ΔUf1,ΔUf1set分別為發電機機端正序電壓突變量實測值、整定值;ΔUt1,ΔUt1set分別為主變高壓側正序電壓突變量實測值、整定值;f,fset分別為發電機頻率實測值、整定值;Δf,Δfset分別為發電機頻率變化量實測值、整定值;PG,Pset.1分別為發電機有功功率實測值、整定值I段;T0為判據判別延時。
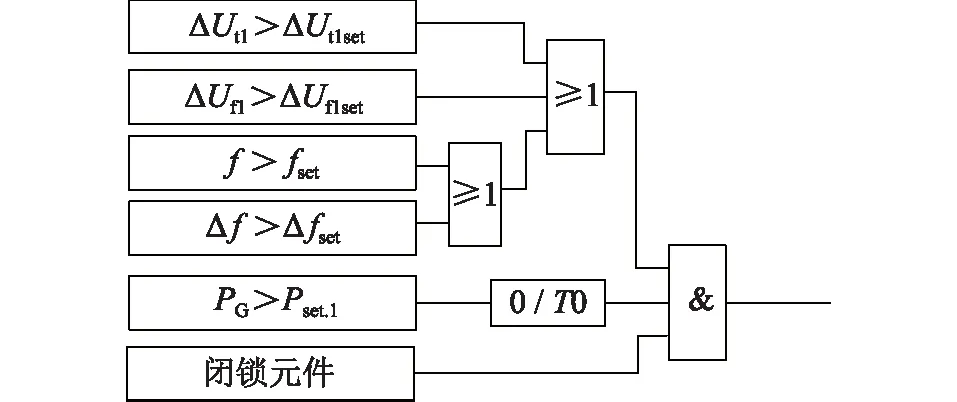
圖1 啟動邏輯Fig.1 Start up logic
裝置啟動前,機組負荷約為44.3%PN(PN為發電機額定有功功率),大于保護投入功率定值(設定值為25%PN),保護功能投入。裝置啟動時機組頻率曲線如圖2所示。
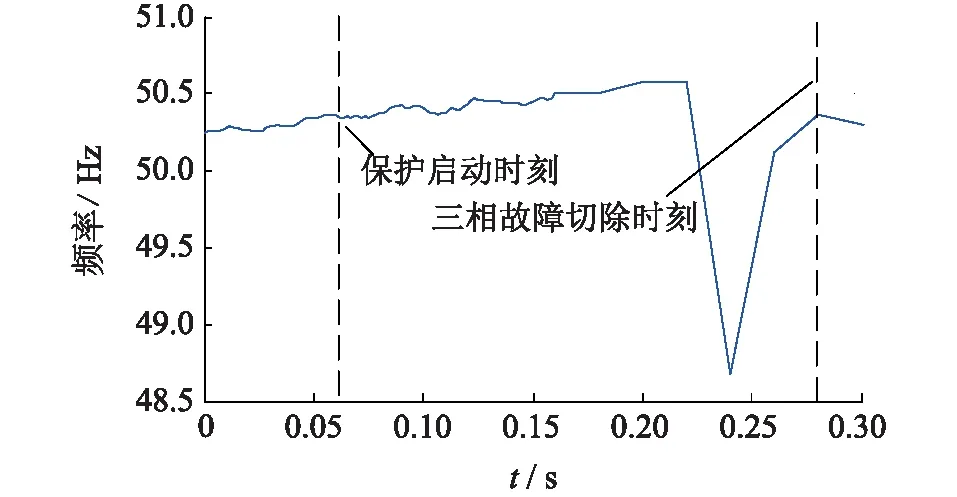
圖2 頻率曲線Fig.2 Frequency curve
在0.06 s時,機組頻率已經上升到50.34 Hz,上升速率約1.5 Hz /s,大于頻率突增定值0.28 Hz /s,滿足頻率突增條件。
根據以上分析,保護投入功率條件、頻率突增條件滿足,切機功能投入。
2.3.2 動作判據分析
動作判據由低功率判據、電流突降判據和低電流判據構成,邏輯如圖3所示。
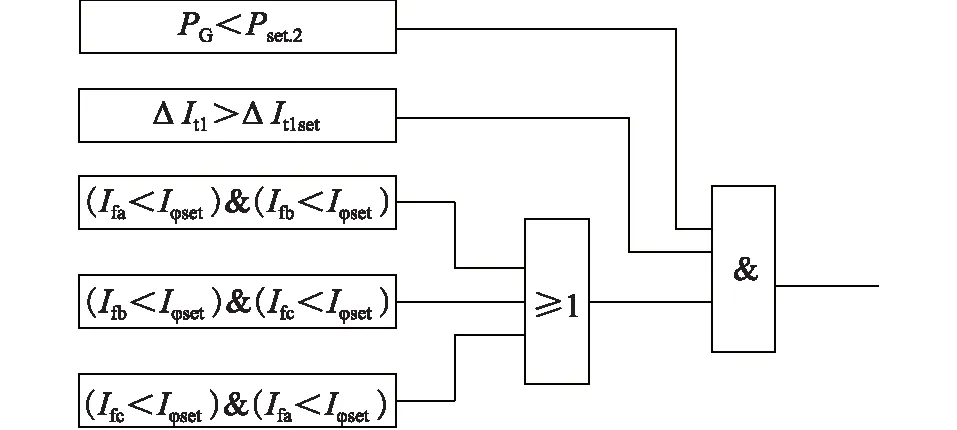
圖3 動作邏輯Fig.3 Action logic
圖中:ΔIt1,ΔIt1set分別為主變高壓側正序電流突變量實測值、整定值;Ifa,Ifb,Ifc分別為發電機機端A,B,C相正序電流;Iφset為發電機機端電流整定值;PG,Pset.2分別為發電機有功功率實測值、整定值II段。
2.738 s時,機組有功功率P降至11.68%PN,達到裝置低功率定值,如圖4所示。
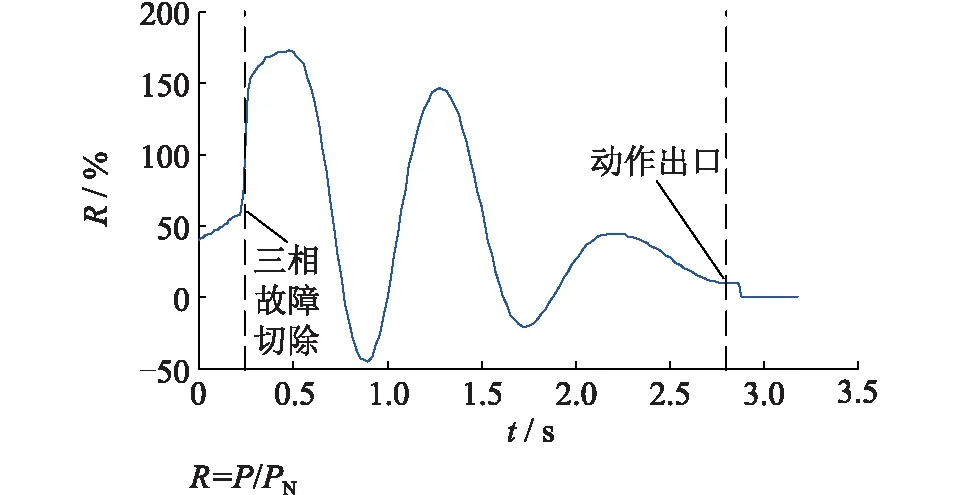
圖4 有功功率曲線Fig.4 Active power curve
2.52 s時(第3個振蕩周期)主變高壓側電流突降值為0.113 6 A,高于主變高壓側正序電流突降定值0.11 A,如圖5所示。
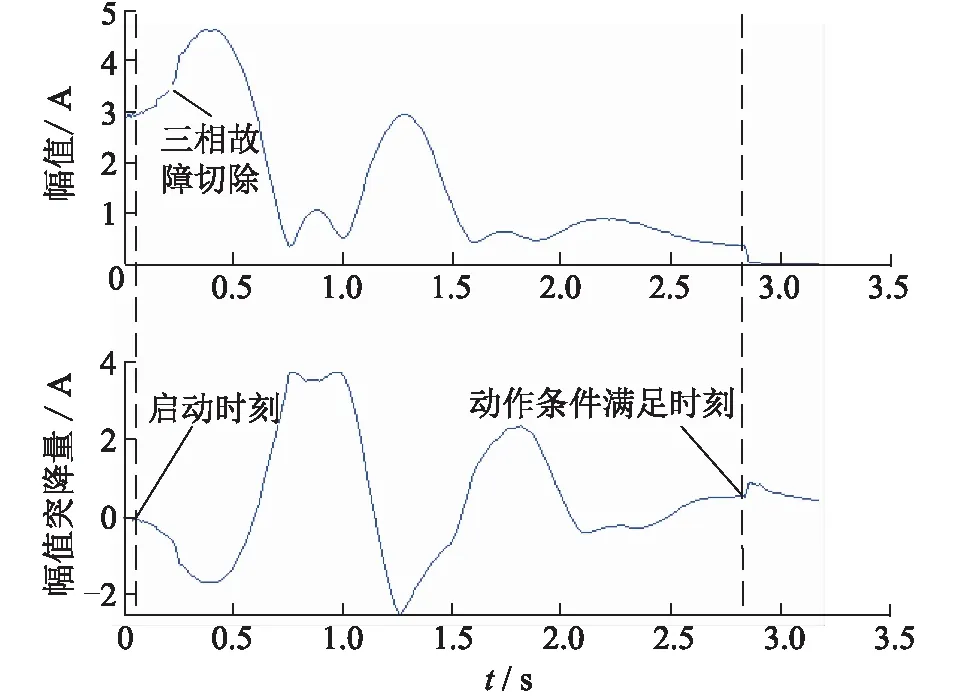
圖5 主變高壓側電流幅值及突降量Fig.5 Current amplitude and dump of main transformer’s high voltage side
2.71 s時,發電機正序電流最低降至0.88 A,小于發電機機端低電流定值1.01 A,如圖6所示。
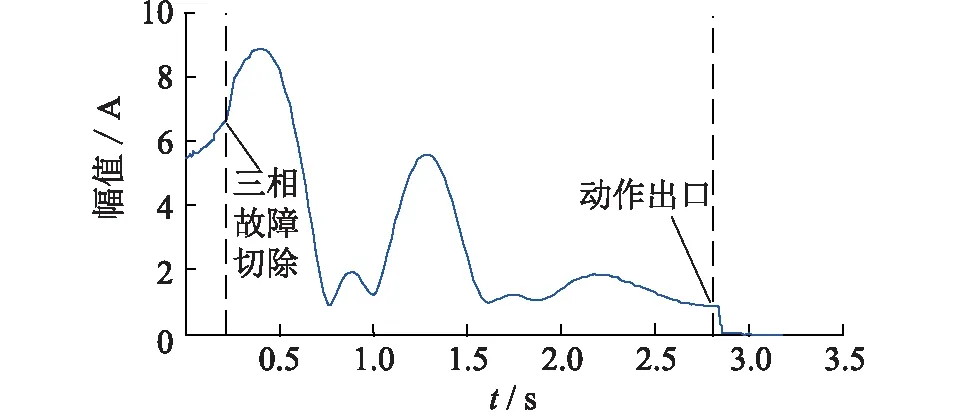
圖6 發電機正序電流Fig.6 Positive sequence of generator
2.3.3 閉鎖判據分析
閉鎖判據由正序過電壓判據和負序欠電壓判據構成,邏輯如圖7所示。

圖7 閉鎖邏輯Fig.7 Blocking logic
圖中:U1set為正序電壓整定值;U2set為負序電壓整定值;Uf1為發電機機端正序電壓;Ut1為主變高壓側正序電壓;Uf2為發電機機端負序電壓;Ut2為發主變高壓側負序電壓。
零功率保護動作前,發電機和主變正序電壓始終高于閉鎖定值49.1 V,不滿足正序電壓閉鎖條件。發變組三相電壓對稱,故負序電壓始終偏低,也不滿足負序電壓閉鎖條件。
2.4 線路保護
2套保護均配置光纖差動、三段式距離、零序過流等保護,故障期間,保護裝置及線路故障錄波器均啟動。
由于故障發生在電站送出線變電站的下級線路,故電廠側光纖差動保護、距離I段保護、距離II段保護均未動作。距離III段整定時間為3.8 s,時間較長,故距離III段保護未動作。系統單相接地故障持續30 ms,零序II段、III段延時分別為2 s,3.8 s,故零序II段、III段保護均未動作。
2.5 發變組保護
該電廠發變組保護南瑞繼保PCS-985系列,有發電機保護、變壓器保護、高廠變保護等。故障過程中,保護啟動,但均未動作,動作行為正確。
綜合以上研究分析,可以得出發生事故的主要原因:(1) 給煤機跳閘觸發鍋爐全燃料中斷信號;(2) 下級線路故障造成功率大幅波動,觸發調門快控功能動作,調門關閉后機組功率下降,達到保護動作條件,引起零功率保護動作,機組解列。
3 防范措施
功率突降保護是在機組無法正常輸出功率時動作,線路故障會引起功率振蕩,然而不應該造成機組跳閘,因此這是一起由于線路故障造成零功率切機動作的誤動事件,需要進一步分析并采取相應的防范措施,消除機組的誤跳隱患。
(1) 該機組給煤機的低壓變頻器不具備低電壓和高電壓穿越能力(現有的一類輔機高低電壓穿越能力標準討論稿稱:電壓低到20%UN,UN為低壓母線額定線電壓,運行0.5 s;低到60%UN,運行5 s;低到90%UN時長期運行;高電壓130%UN時運行0.5 s),是電廠安全運行的隱患,應積極落實整改,對于已投運變頻器應對其控制部分和動力部分進行整體改造,如外加串聯不間斷電源(uninterruptible power supply,UPS)等措施,從根本上解決變頻器控制、動力部分固有問題,確保機組一類輔機具有高電壓、低電壓穿越能力。
若受客觀條件所限,暫時無法實施改造措施,則可以根據輔機設備能力、電廠安全運行要求、變頻器安全經濟能效比等因素,考慮對優化分散控制系統(distributed control systems, DCS)進行優化。以低壓給煤機為例,當全廠給煤機變頻器低電壓動作瞬時全部停運時,煤倉內剩余煤粉仍可短時運行,不用瞬時觸發鍋爐MFT。若在短時內廠用電電壓能及時恢復正常,給煤機變頻器則配合自啟動;若廠用電電壓未能及時恢復,則給煤機變頻器正常停運。給煤機變頻器DCS 控制策略優化可以考慮在廠用電瞬間失去或波動時防止熱工自動回路切換的邏輯,即在這短暫的時間內熱工自動回路不進行切換,保證整個鍋爐控制系統不產生大的擾動;從 DCS 送給煤機的啟動指令應在廠用電電壓波動或瞬間失去恢復后能夠自動啟動給煤機,即將 DCS 啟動給煤機的指令由脈沖改為電平形式;給煤機就地控制柜的邏輯應保證在廠用電電壓波動或瞬間失去恢復后,能夠在 DCS 遠方控制等措施[13-15]。
(2) 在外部故障發生至切除期間,從機組DCS畫面查看,機組負荷均出現大幅波動。目前,國內多數電廠在電氣側選用的功率變送器為國產三相三線制功率變送器,響應時間一般為250 ms,測量穩態功率信號時,效果較好,但當功率突變時,由于響應能力的制約,其輸出可能產生畸變。省外也發生過多起由于功率變送器輸出波形畸變造成機組非計劃停機的情況。故對于T3000 DEH系統,建議改用動態性能更為可靠的功率變送器,目前新型功率變送器可在暫態時由穩態測量繞組切換至保護繞組進行計算,有效地解決了電流互感器飽和問題;另一方面新型功率變送器響應時間一般小于30 ms,與實際功率擬合度較高,與控制系統計算周期和刷新率可以很好地進行匹配[16]。
另外發電廠熱控專業一般要求提供3個功率功率變送器信號以便在邏輯上進行 “三取二”配置,因此一般都會在電氣系統設置多個有功功率變送器,但這些變送器電壓回路卻取自同一組電壓互感器的二次繞組,輔助電源也取自同一個電源開關,帶來許多安全隱患。一旦在機組運行中發生電壓互感器二次繞組斷線或變送器輔助電源失電,會造成變送器輸出歸零或功率信號減半,嚴重影響機組調節,甚至造成停機。故建議參與機組協調的功率變送器應分別從電壓互感器的3個繞組取得機組電壓信號輸入,變送器電源可從 2 套機組不間斷電源輸出,保安電源取得3路互相獨立的交流輔助電源;也可以在不降低設備運行可靠性的前提下,盡量減少電流互感器、電壓互感器二次負載,如采用雙輸出功率變送器,以提高變送器測量精度。
(3) 當機組功率突降后,在發電機電抗和主變電抗上的電壓降消失,在很短的時間內發電機勵磁調節器來不及反應,故引起主變高壓側和發電機機端正序電壓突升,而機端電流會隨即衰減,衰減時間由電流互感器負荷電流以及二次回路衰減常數決定。故可在啟動或者動作邏輯中可考慮增加電壓突升、電流突降等輔助判據,防止機組振蕩時功率突降保護誤動作。
主變高壓側正序電壓突升值如式(1)所示:
(1)
式中:ΔU為突變時間內電壓突變值;Δt為突變時間;PG為發電機有功功率;φ為額定功率因素角;SB為基準功率;Xd′為折算后直軸瞬變電抗飽和值;XT為折算后主變短路阻抗;Un為二次額定電壓;K為靈敏系數。
機端正序電壓突升值如式(2)所示:
(2)
機端電流突降值如式(3)所示:
(3)
式中:ΔI為機端電流變化值;Iload,Iload′分別為功率突降前、后機端電流互感器二次負荷電流;τ為功率突降后電流互感器二次回路衰減時間常數,其值由二次電纜長度、截面、電流互感器剩磁大小等因素決定。
在功率突降保護自身邏輯功能優化的同時,也可以考慮對功率突降保護定值進行優化。如適當延長動作時間,以可靠躲過失靈保護動作時間,目前省內220 kV及以上電壓等級失靈保護動作時間約為0.2~0.3 s,考慮到回路整組時間,可將功率突降保護延時動作時間整定至0.4~0.5 s。另外可適當增加啟動判據中頻率突增定值。以省內某660 MW機組為例,發電機組總轉動慣量為發電機轉動慣量、汽輪機轉子慣量、高壓轉子慣量、低壓轉子慣量之和。故機組慣性常數如式(4)所示:
(4)
式中:M為機組慣性常數;J為發電機組總轉動慣量,取7 167.7 MPa;SN為發電機額定容量,取667×106W;ω0為發電機角速度。經計算得M為10.596 s,故對于大型火電機組,M一般約為10 s。發電機功率突降到零時的df/dt值為如式(5)所示:
(5)
(4) 局部電網振蕩主要成因是電網系統呈弱阻尼特性,一旦系統發生擾動,易形成電網振蕩。故發電廠電力系統穩定器(power system stabilization, PSS)應按照要求進行相關涉網試驗并對其參數進行測定,機組并網后PSS功能必須投入運行,可以抑制系統低頻振蕩,從而降低功率突降保護誤動的風險。
4 結語
功率突降保護在電廠送出線路出現異常時,能夠有效保護設備的安全,然而系統振蕩造成功率突降保護誤動作的事件也時有發生。文中通過分析事件經過及原因,提出了合理化建議和改進思路,消除了大型發電機組在線路故障時由于功率振蕩造成機組誤跳的隱患,保證了機組和電網的安全穩定運行,具有重要的意義。
[1] 喬永成,寇海榮,王云輝,等. 發電機零功率保護[J]. 電力自動化設備,2011,31(5):148-151.
QIAO Yongcheng,KOU Hairong,WANG Yunhui, et al. Zero power protection of generator [J]. Electric Power Automation Equipment,2011,31(5):148-151.
[2] 林長鵬,張曉亮,張寶紅. 火力發電廠零功率保護整定計算方法[J]. 黑龍江電力,2013,35(2):156-158.
LIN Changpeng,ZHANG Xiaoliang,ZHANG Baohong. Setting calculation of zero-power protection for thermal power plant [J]. Heilongjiang Electric Power,2013,35(2):156-158.
[3] 兀鵬越,楊 博,王海濤,等. 火電機組零功率保護的應用研究[J]. 中國電力,2014,47(9):107-111.
WU Pengyue,YANG Bo,WANG Haitao, et al. Application research of zero power protection for thermal power plants [J]. Electric Power,2014,47(9):107-111.
[4] ARABI S, KUNDUR P,HASSINK P. Small signal stability of a large power system as affected by new generation additions [C]∥ Proceedings of IEEE Power Engineering Society T&D Conference, 2000:812-816.
[5] 李 瑋. 零功率切機保護的技術探討與論證[J]. 華北電力技術,2014 (10):15-20.
LI Wei. Technology research and demonstration of zero-power tripping protection[J]. Electric Power Automation Equipment,2014 (10):15-20.
[6] 王可山. 零功率切機保護在大型火電廠的應用[J]. 能源與節能,2011(4):80-82.
WANG Keshan. Application of zero-power tripping protection for large thermal power plant[J]. Energy and Energy Conservation,2011(4):80-82.
[7] 韓 涌. 零功率切機保護在呂四港電廠的應用[J]. 中國科技投資,2012(33):78-79.
HAN Yong. Application of zero-power tripping protection in Lvsi power plant[J]. China Venture Capital,2012(33):78-79.
[8] 錢偉康,方宗達. 影響時分割乘法器準確度的主要因素分析[J]. 上海理工大學學報,2002,24(3):268-271.
QIAN Weikang, FANG Zongda. Analysis on main factors influencing accuracy of time-division multiplier [J]. University of Shanghai for Science and Technology,2002,24(3):268-271.
[9] 黃 純,何怡剛,江亞群,等. 交流采樣同步方法的分析與改進[J]. 中國電機工程學報, 2002,22(9):39-43.
HUANG Chun, HE Yigang, JIANG Yaqun, et al. Analysis and improvement of synchronization[J]. Proceedings of the CSEE,2002,22(9):39-43.
[10] LU Zuling. An error estimate for quasi-integer period sampling and an approach for improving its accuracy[J]. IEEE Trans on IM, 1988,37(2):219-222.
[11] 張 寶,楊 濤,項 謹,等. 電網瞬時故障時汽輪機汽門快控誤動作原因分析[J]. 中國電力,2014,47(5):18-22.
ZHANG Bao, YANG Tao, XIANG Jin, et al. The cause analysis of steam turbine valve control misoperation caused by grid instantaneous fault[J]. Electric Power, 2014, 47(5): 18-22.
[12] 楊 濤, 黃曉明, 宣佳卓. 火電機組有功功率變送器應用分析[J]. 中國電力,2016,49(6) :53-56.
YANG Tao, HUANG Xiaoming, XUAN Jiazhuo. Analysis on application of active power transducer in thermal power generating units[J]. Electric Power, 2016, 49(6): 53-56.
[13] 周道軍. 變頻器防低電壓穿越分析[J]. 江蘇電機工程,2015,34(2):37-40.
ZHOU Daojun. The Analysis of frequency converter prevent low voltage ride through[J]. Jiangsu Electrical Engineering, 2015, 34 (2): 37-40.
[14] 姚新陽,黃學良,顧 文,等. 火電機組一類輔機變頻器低電壓穿越改造技術研究[J]. 電氣技術,2015(12) :26-30.
YAO Xinyang,HUANG Xueliang,GU Wen, et al. Research on the low voltage ride through reconstruction technology for frequency converter of thermal power unit auxiliary equipment[J]. Electrical Engineering, 2015(12): 26-30.
[15] WANG Xiaoyu,TAO Zhang,SHU liu, et al. Ride-through for important auxiliary equipment drive inverter [C]∥Power and Engineering Conference , 2014:1-5.
[16] 董 亮,馬 皓,王小瑞,等. 基于滑動平均電壓電流相移的數字化功率計算方法[J]. 電力系統自動化,2012,36(5) :51-56.
DONG Liang,MA Hao,WANG Xiaorui, et al. A modified digital power calculating method based on sliding averaging and phase shifting of voltage and current[J]. Automation of Electric Power Systems, 2012,36(5): 51-56.
猜你喜歡
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
電子制作(2017年7期)2017-06-05 09:36:13
大電機技術(2017年3期)2017-06-05 09:36:02
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
軍事文摘(2016年16期)2016-09-13 06:15:49
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電力工程技術(2014年1期)2014-03-20 14:19:06