面向移動機器人的主備雙路智能電池系統設計
2018-02-08 08:28:44劉洪濤
微處理機 2018年1期
劉洪濤,王 猛
(中國電子科技集團公司第四十七研究所,沈陽110032)
1 引 言
移動機器人對電池管理要求較高。其可靠性決定了移動機器人能否正常工作。然而,目前移動機器人一般由一組大容量電池組集中為所有電氣設備供電,或者由多組電池組分別為不同電氣設備供電[1-4]。當其中一組電池出現故障,導致供電中斷,機器人整個系統或部分功能將無法正常工作。設計并實現了主備雙路智能電池系統,該系統實現了外部供電、主備雙路智能電池的無縫切換、過放電保護、電量檢測、溫度監測等功能。并通過實驗驗證了該系統能夠為移動機器人可靠地提供電能。
2 智能電池系統介紹
智能電池系統(SBS)遵循SBS1.1規范,包括智能電池、系統管理總線(SMBus)、智能電池選擇器和智能電池充電管理器。智能電池充電管理器通過SMBus總線與智能電池通訊,采集電池的溫度、氣壓、電流、電壓等信息,實現充放電管理、電源軌切換和監控等功能。SBS的模塊化特性使系統具有靈活的擴展能力,雙電池切換實現不間斷供電,從而保障供電可靠性。圖1為SBS系統的原理框圖。
與傳統方案相比,SBS系統有如下優點[5]:
①智能電池的溫度、氣壓傳感器保障電池電量評估準確,充放電管理精準;
②即插即用,標準兼容。具有不同化學特性、配置,甚至不同充電算法的任何符合SBS標準的智能電池組都可以直接兼容;
③內置安全功能。SBS標準提供監視計時器和一個處在電池和充電器之間的特別“安全信號”接口;
④充電器可無主控制器自適應管理;
⑤主控制器可根據需要收集電池狀態信息,制定不同的運行策略。
蔣忠偉等人設計的智能電池系統[6-7]是在SBS基礎上,采用RS-232協議替代SMBUS總線提升電池管理系統的通用性.但因采用單電池的智能電池系統,無法實現不間斷供電,難以保障移動機器人供電的高可靠性要求。
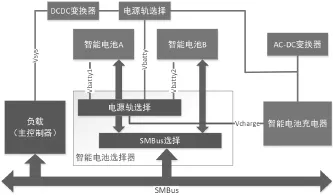
圖1 SBS系統原理框圖
3 主備雙路智能電池系統設計
主備雙路智能電池系統可實現直流輸入與智能電池組輸入之間、兩個智能電池組之間的電源路徑選擇,智能電池組的充電管理以及與STM32系統之間的通信交互功能。目前市面上支持智能充電的芯片較多,比較常見的有德州儀器公司的BQ247XX,凌特公司的LTC40XX,美信公司的MAX87XX等等。選用凌特公司的雙智能電池管理器芯片LTC1760作為智能電池系統管理電路的核心,通過單芯片實現智能電池選擇器和充電器的功能。其原理框圖如圖2所示。圖3為采用LTC1760芯片的連接示意圖。
采用此種設計的特點如下[8]:
①雙電池同步充電模式相對順序充電模式的充電器可以縮短充電時間。
②3個電源通路MOSFET支持從DCIN和兩個電池同時放電,提供更大的放電電流。
③硬件可編程電流和電壓安全限制以及很多其他安全功能用以補充電池的內部保護電路。
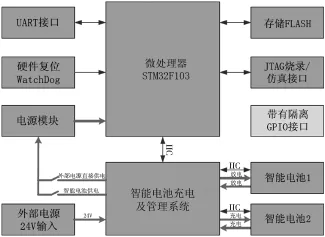
圖2 雙路智能電池系統的原理框圖
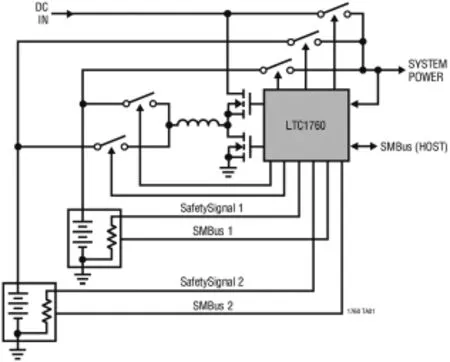
圖3 LTC1760系統架構示意圖
3.1 電路設計
主備雙路智能電池系統采用凌特公司的雙智能電池管理器芯片LTC1760作為核心芯片。LTC1760是為使用雙路智能電池應用而設計的高度集成的3級電池充電器和選擇器,采用降壓開關拓撲,具有符合智能電池標準定義的多種功能和輸入限流、安全限制等新增功能。
LTC1760的SMBus接口可以跟蹤電池的內部電壓和電流,同時允許一個外接的SMBus主機監控任意一個電池的狀態。通過SMBus接口,主機系統可獲知電池供電系統的工作狀態。例如電池組的電壓、電流、充電電壓、充電電流、電池告警狀態,以及使用的是外接電源還是電池組供電等。LTC1760的充電精度由電池組內部的電壓、電流測量值決定,典型的測量精度誤差為±0.2%。雙電池系統通常采用順序放電方式放電,即先消耗電池組1的電量,再消耗電池組2的電量,通過這種方式來簡單地延長總的電池放電時間。而LTC1760采用專有的供電路徑架構,支持兩路電池同時充電或放電。典型狀態下,可使電池供電時間延長10%,而充電時間可減少50%。
LTC1760芯片具有功能完備,電路設計主要需要確定如下5個參數:
(1)輸入限流電阻RCL
用于限制系統充電電流和負載電流之和,不超過外接電源適配器的額定電流。系統中,適配器選擇24V、150W,額定電流為6A,RCL=100mV/ILIM
RCL選擇0.018Ω/1W的電阻,ILIM=5.7A。
(2)限流電阻RILIM
設定充電器可以供給電池的最大允許電流,任何超過這個限度的值都會被限定值所取代。
(3)匹配充電電流檢測電阻RSENSE
作用是讓充電器的滿標度電流與設置滿標度限流值同步。在本系統中充電最大電流設定為4A,RILIM設定為開路,RSENSE使用0.025Ω/1W的電阻。
(4)限壓電阻RVLIM
用于設定充電器可輸出的5個限壓值中的一個,系統中充電限制電壓設定為16.8V,因此,RVLIM選擇33kΩ的電阻。
(5)短路保護電阻RSC
用于設定電路短路保護啟動電流。系統中3個電源通路都由2個背對背的P溝道場效應管與短路檢測電阻RSC串聯。系統中選擇RSC=0.012Ω/1W。
基于以上5個主要參數,并結合其他相關輔助電路設計,最終形成了主備雙路智能電池系統整體方案并制作了控制板實物電路。圖4給出了主備雙路智能電池系統的電池管理模塊及斷電保護模塊原理圖。圖5給出了主備雙路智能電池系統控制板的板圖設計,圖6則給出了控制板實物圖。
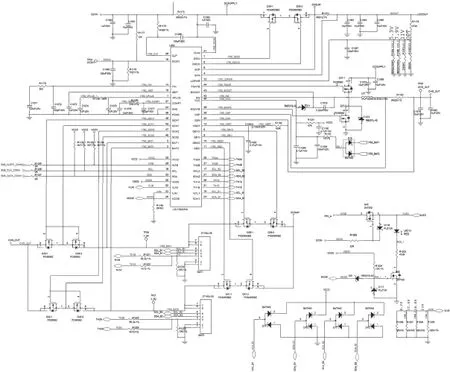
圖4 電池管理模塊及斷電保護模塊原理圖
3.2 軟件設計
為了更準確的了解主備雙路智能電池系統運行情況以及電池狀態,基于Microsoft Visual Studio開發工具包,使用C語言和C++語言進行編程,設計并開發了與之匹配的智能電池管理系統應用程序。通過該應用程序可以實時監控系統運行情況及電池狀態,并可以實現主備雙路電池系統的充放電管理和狀態監控等功能,為機器人控制器的電源管理策略提供數據。圖7為主備雙路智能電池系統應用程序的監控及配置界面。
圖5 主備雙路智能電池系統控制板布局圖
圖6 主備雙路智能電池系統控制板實物圖
4 實驗結果
主備雙路智能電池系統已經應用到某型號移動機器人的設計開發中。移動機器人控制器通過串口與智能電池系統通訊,實現過放電保護、電量檢測、溫度監測等功能。在一系列的測試實驗中,該智能電池系統運行狀態良好,能夠準確的監測電池狀態,并采取相應的調整措施,為移動機器人提供穩定的電能。
5 結束語
移動機器人對電池管理要求較高。設計并實現了主備雙路智能電池系統,較為詳細的介紹各部分的組成結構和原理設計,并通過實驗驗證了該系統的可靠性和穩定性。主備雙路智能電池系統可以實現外部供電、主備雙路智能電池的無縫切換,過放電保護,電量檢測,溫度監測等功能,進一步提升了移動機器人供電系統的可靠性,并推動了移動機器人的發展。
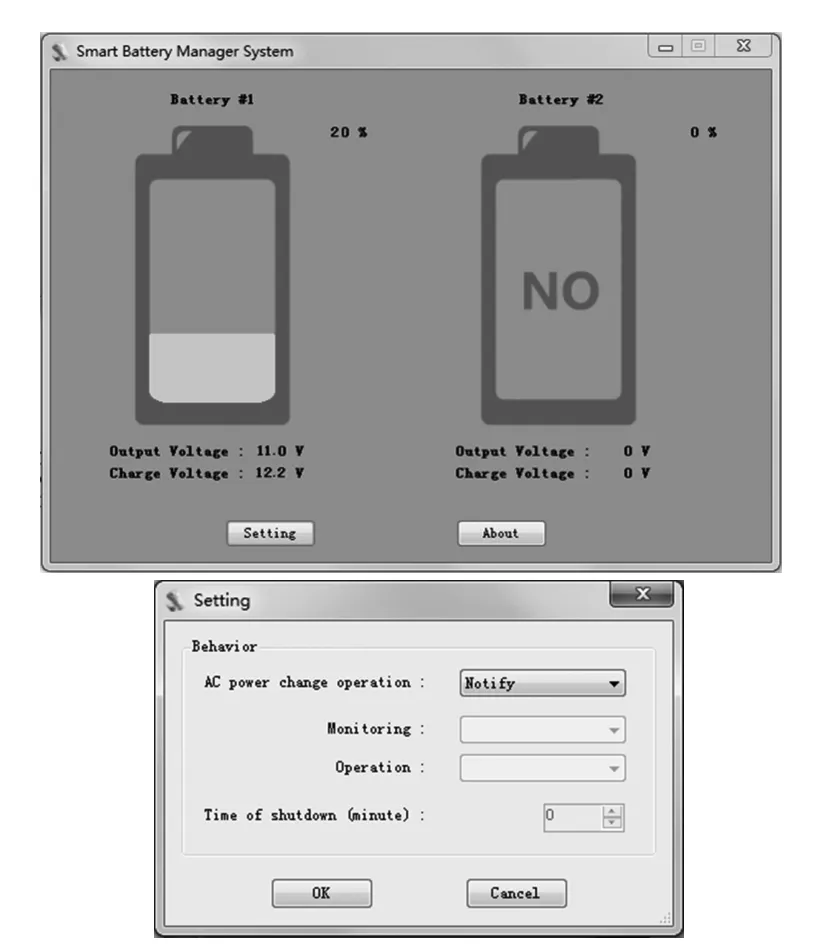
圖7 主備雙路智能電池系統應用程序的監控及配置界面
[1]梁東,施家棟,王建中.移動機器人不間斷電源管理系[J].計算機測量與控制,2013,21(12):3418-3420.LIANGDong,SHIJiadong,WANGJianzhong.Uninterruptible power supply management system on mobile robots[J].Computer Measurement&Control,2013,21(12):3418-3420.
[2]瞿巍,夏洪,李雪仁.移動機器人的電源模塊和電機驅動模塊的設計[J].湖南農機,2014,41(3):89-91.QU Wei,XIA Hong,LI Xueren.Mobile robot power module and motor drive module design[J].Hunan Agricultural Machinery,2014,41(3):89-91.
[3]姜衛東,王偉,王金平,等.基于混合脈寬調制的并聯網變換器控制方法[J].電力系統自動化,2017,41(22):124-132.JIANG Weidong,WANG Wei,WANG Jinping,et al.Control method forparallelgrid-connected convertersbased on hybrid pulse width modulation[J].Automation of Electric Power Systems,2017,41(22):124-132.
[4]胡鄭希,胡泊.基于多傳感器的移動小車循墻導航控制[J].自動化儀表,2017,38(6):40-45.HUZhengxi,HU Bo.Wall-following navigation controlofmobile car based on multi-sensor[J].Process Automation Instrumentation,2017,38(6):40-45.
[5]精密智能電池系統設計原理分析[DB/OL].http://www.elecfans.com/yuanqijian/dianchi/dianchishengchang/20091-210129067.html,2009-12-10/2017-11-1.The design principles analysis of precision intelligent battery system[DB/OL].http://www.elecfans.com/yuanqijian/dianchi/dianchishengchang/20091210129067.html,2009-12-10/2017-11-1.
[6]蔣忠偉,孫一鳴,胡曉吉.基于嵌入式計算平臺的智能電池系統的設計[J].計算機工程與設計,2011,32(6):1970-1974.JIANG Zhongwei,SUN Yiming,HU Xiaoji.Design of smart battery system based on embedded computing[J].Computer Engineering and Design,2011,32(6):1970-1974.
[7]李作文,于海月.單片機控制太陽能充電控制器[J].光電技術應用,2015,30(3):54-57.LIZuowen,YUHaiyue.Solarchargecontrollerbasedon single chip microcomputer[J].Electro-optic Technology Application,2015,30(3):54-57.
[8]Linear technology.LTC1760 Data Sheet[DB/OL].http://www.linear.com.cn/docs/1958,2008-1/2017-11-1.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
制造技術與機床(2017年3期)2017-06-23 08:11:21
