一種非全對稱低耦合度三平移一轉動并聯機構的設計及其運動學
2018-02-05 06:15:17沈惠平楊廷力邵國為
中國機械工程 2018年2期
沈惠平 許 可 楊廷力 邵國為
常州大學現代機構學研究中心,常州,213016
0 引言
KRUT等提出了一類可實現3T1R的四自由度I4L[1]、I4R[2]、Par4[3]、Heli4[4]并聯機器人,其中,I4機械手在兩相鄰支鏈末端安裝子平臺,兩子平臺通過齒輪齒條傳動,將兩子平臺間的相對移動轉化為末端執行器繞z軸的轉動,但這種結構使動平臺整體尺寸增大;趙鐵石等[5]提出了一種4-URU型3T1R并聯機器人構型;楊廷力等[6]基于單開鏈理論提出了一類3T1R并聯構型;黃田等[7]發明了3種Cross-IV的3T1R型四自由度高速并聯機械手;劉辛軍等[8]研制出具有一個動平臺的X4型并聯機器人樣機;FANG等[9]基于螺旋理論,提出了具有相同支鏈的4-DOF和5-DOF的并聯機構;ANCUTA等[10]提出了一種實現Sch?nflies運動的λ-四滑塊四自由度并聯機構,并給出了該機構的位置正反解、機構奇異位形和工作空間分析;RICHARD等[11]對一種部分解耦的3T1R并聯操作手樣機進行了運動學分析。
上述3T1R機構具有如下特點:①4條支鏈結構完全相同,多為約束支鏈,制造、裝配較復雜;②4條支鏈對靜平臺的幾何中心(或2條以上中心線)完全對稱布置(簡稱全對稱);③耦合度κ較大,為κ=2[12],機構位置正解、動力學求解較為復雜。
為此,本文首先提出一種含不同支鏈結構(2條約束支鏈、2條無約束支鏈)的3T1R并聯機構,且僅對靜平臺的對角線對稱布置(簡稱非全對稱),耦合度較高(κ=2)。為此,采用拓撲結構降耦方法來使機構的耦合度降至為1,但保持其基本功能——方位特征(position and orientation characteristics, POC)及自由度(degree of freedom, DOF)不變;然后,給出了該降耦機構位置正解求解的一維搜索法及其數值解;最后,分析了該降耦機構的工作空間、轉動能力及奇異性條件。
1 基于POC方程的并聯機構拓撲設計理論[13]
機構末端運動輸出的POC方程為
(1)
(2)
式中,MJi為第i個運動副的方位特征集;Mbi為第i條支鏈末端的POC集;MPa為機構動平臺的POC集。
并聯機構的自由度公式為
(3)
(4)
由基于有序單開鏈(single-open-chain,SOC)的機構組成原理知,任一機構可分解為一系列約束度為正、零、負的三種有序單開鏈,單開鏈可視為斷開了某個構件的回路,因此,第j個SOC的約束度定義為
(5)
式中,mj為第j個SOC的運動副數;fi為第i個運動副的自由度(不含局部自由度);Ij為第j個SOC的驅動副數。
進一步,一組有序的υ個SOC可組成一個獨立回路數為υ的基本運動鏈(basic kinematics chain,BKC),對一個BKC而言,須有
因此,其耦合度為
(6)
2 3T1R機構設計及其拓撲特性分析
2.1 3T1R機構的設計及特點
由式(1)所示的串聯機構的POC方程的“并運算”規則易知,圖1a所示的含4個球副S的平行四邊形復雜支鏈未端產生的POC集為三平移兩轉動(3T2R),兩轉動(2R)的軸線分別為R21、R22的軸線;由式(2)所示的并聯機構的POC方程的“交運算”規則知,當2條這樣的3T2R復雜支鏈在靜平臺0上的轉動副軸線不平行(R21、 R11不平行)時,即可消除其一個轉動而保持繞動平臺1法線(R22或R12)的轉動,從而獲得3T1R輸出;進一步,因該機構的自由度為4,為使每條支鏈僅具有1個驅動副,其他的2條支鏈可由S-P-S、S-S-R等無約束支鏈來實現,因此,本文提出的非全對稱3T1R機構如圖1b所示[14-15]。
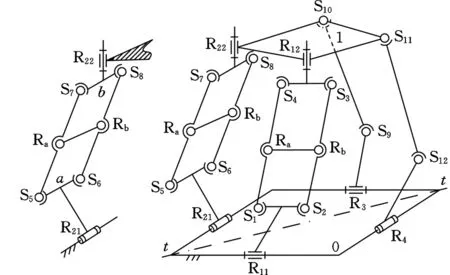
(a)產生3T2R的復雜支鏈(b)3T1R機構圖1 3T1R并聯機構設計Fig.1 The design of a novel 3T1R parallel mechanism
這樣,該機構的靜平臺0與動平臺1之間僅用2條相同的含4個球副的平行四邊形復雜支鏈及2條S-S-R型無約束支鏈連接;靜平臺0上的R21與R11垂直布置,R3與R4可任意布置。從整體上看,該機構僅相對于靜平臺的對角線直線t-t對稱,與具有4條含4S的平行四邊形復雜支鏈的H4、IR4、Par4、X4等完全對稱機構相比,對稱性已有降低,介于完全對稱與完全不對稱之間,稱為非全對稱,但結構簡單,制造成本降低,裝配容易。
2.2 3T1R機構的拓撲特性分析
2.2.1確定并聯機構動平臺的POC集
4條支鏈的拓撲結構分別為bi:{Ri1(-:(4S))⊥Ri2}(i=1,2);b3:{R3-S9-S10};b4:{R4-S12-S11}。
選定動平臺1上的基點O′。確定支路末端構件的POC集。因平行四邊形(4S)的運動輸出等價于2T1R,所示由式(1)得

由式(2)得動平臺POC集:
因此,動平臺1可實現三平移一轉動輸出。
2.2.2確定并聯機構自由度
此機構可分解為3個獨立回路:
SOC1{-R11(-(4S))⊥R12∥R22(-(4S))⊥R21}
SOC2{-R3-S9-S10-}
SOC3{-R4-S12-S11-}
(1)確定第一個回路的獨立位移方程數ξL1。由式(3)、式(4)得
(2)確定第二個回路的獨立位移方程數ξL2。由式(3)、式(4)得

(3)確定第三個回路的獨立位移方程數ξL3。由式(3)得
(4)確定并聯機構自由度。由式(4)得
因此,當選取靜平臺0上的4個轉動副R11、R21、R3、R4為主動副時,動平臺1可實現三平移一轉動輸出。
2.2.3確定并聯機構耦合度κ
確定SOC1、 SOC2、 SOC3的約束度。因2.2.2節已求得各回路的獨立位移方程數,即ξLj=6(i=1,2,3),因此,由式(5)得它們的約束度:

由式(6)得
可見,該機構僅包含一個BKC,但耦合度仍較高(κ=2),因此,機構位置正解還較復雜[16]。為此,可通過機構拓撲結構降耦方法,將其耦合度降低為1,使其位置正解易用一維搜索法求出,而保持機構的運動輸出類型和自由度不變,即方位特征仍為三平移一轉動。
3 3T1R并聯機構的結構降耦設計
3.1 降耦機構的設計及POC集分析
現根據并聯機構的結構降耦原理和方法[17],將動平臺1上兩條復雜支鏈末端R12副與R22副軸線重合,從而構成一條混合支鏈;兩條無約束S-S-R支鏈上的布置不變,這樣,可使機構耦合度從2降至為1,但其方位特征和自由度不變,簡稱為降耦機構[18]。降耦后的機構仍僅關于靜平臺對角線t-t對稱,也為非全對稱,如圖2所示。此時,該機構的三條支鏈為
b1:{-R11(-(4S))-R12⊥((4S))R21-R22}
b2:{-S10-S9-R3-}
b3:{-R4-S12-S11-}
圖2 低耦合度的3T1R降耦機構(κ=1)Fig.2 3T1R coupling-reducing PM(κ=1)
選定動平臺1上的基點O′,如圖2所示,確定支路末端構件的POC集。由式(1),得

確定動平臺POC集。由式(2),得
因此,動平臺1仍可實現三平移、一轉動輸出。
3.2 降耦機構的自由度分析
降耦機構的三個獨立回路為
SOC1{-R11(-(4S))-R12⊥(4S)⊥R21-}
SOC2{-R22-S10-S9-R3-}
SOC3{-R4-S12-S11-}
(1)確定第一回路的獨立位移方程數ξL1。由式(3)、式(4)得

(2)確定第二回路的獨立位移方程數ξL2。第二回路由SOC1、SOC2組成,也可看作由混合支鏈b1和無約束支鏈b2構成,由式(3)、式(4)得

(3)確定第三獨立回路的獨立位移方程數ξL3。由式(3)、式(4)得

(4)確定并聯機構自由度。由式(4)得
因此,當選取靜平臺0上的4個轉動副R11、R21、R3、R4為主動副時,動平臺1仍可實現三平移一轉動輸出。
3.3 降耦機構的耦合度κ計算
同樣,由式(5),分別得確定SOC1、SOC2、SOC3的約束度:

由式(6)得
可見降耦機構也僅包含一個BKC,但其耦合度已降低為1。因此,用基于序單開鏈的一維搜索法較易求得其位置正解。
4 降耦機構的位置分析
4.1 序單開鏈法的位置正解求解原理
由式(5)、式(6)可知,單開鏈的約束度Δj為正值、零、負值三種形式,其物理意義是:
4.2 機構坐標系的建立與參數標注
如圖3所示,該機構靜平臺0為正方形,邊長為2l1;動平臺1為等邊三角形,邊長為l2。與靜平臺0相連接的4個轉動副R11、R21、R3、R4分布在各邊的中點。
圖3 降耦機構的結構參數及其標注Fig.3 Structure parameters of coupling-reducing PM
不失一般性,在靜平臺0上建立坐標系OXYZ,O為靜平臺的重心,X軸垂直于R11的軸線,Y軸平行于R11的軸線,Z軸由右手笛卡兒坐標系法則確定;在動平臺1上建立坐標系O′X′Y′Z′,O′為動平臺1的重心,X′軸垂直于R22S11,Y′軸與R22S11平行,Z′軸由右手笛卡兒坐標系法則確定。設R11c、R3S9和X軸正向的夾角分別為θ1、θ3;R21a、R4S12與Y軸正向的夾角分別為θ2、θ4;又設平行四邊形S5S6S7S8平面與Y軸正方向的夾角為虛擬角δ*,ab與X軸正方向的夾角為γ。
為理解方便,將圖3所示機構展開,得到其平面展開俯視圖(圖4)。其中,dR12和S3S4的夾角、和S8S7的夾角均為固定角β。設混合支鏈的各桿長分別為:R11c=R21a=l3,ab=cd=l4,R12b=R12d=l5,R22R12=l6;兩條無約束支鏈的桿長分別為R3S9=R4S12=l7,S9S10=S11S12=l8;設動平臺O′的坐標為(x,y,z),R22S11與Y軸正向的夾角為動平臺姿態角α。
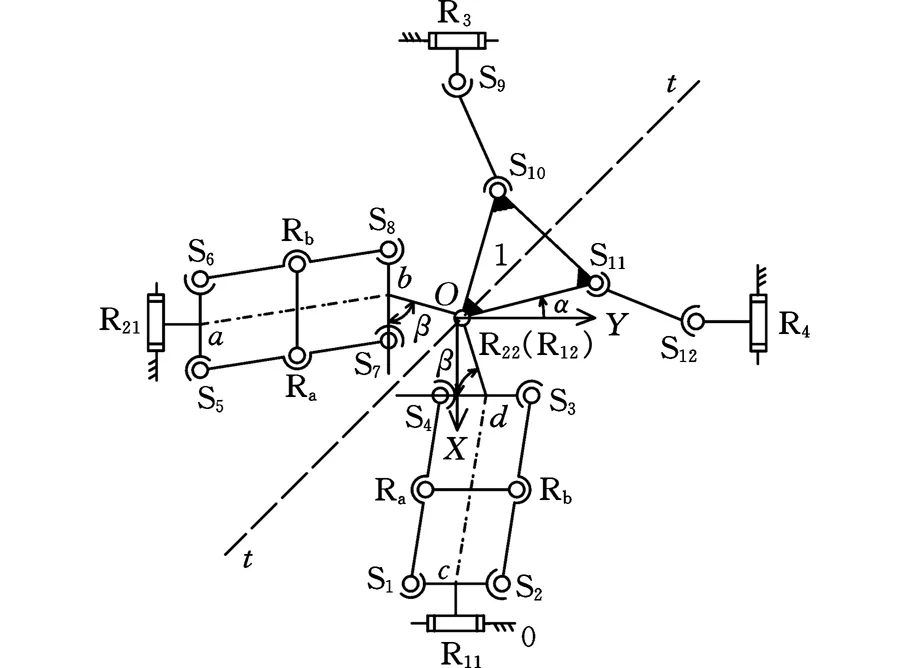
圖4 機構構型的俯視展開表達Fig.4 Expression of top view for decoupling mechanism
4.3 位置正解求解
已知輸入角θ1、θ2、θ3、θ4,求動平臺1上O′的坐標(x,y,z)和轉角α。
易知,在靜坐標系OXYZ下,靜平臺1上的4個轉動副R11、R21、R3、R4的坐標分別為(l1,0,0)、(0,-l1,0)、(-l1,0,0)、(0,l1,0);點c、a及球副S9、S12的坐標分別為(l1+l3cosθ1,0,l3sinθ1)、(0,l3cosθ2-l1,l3sinθ2)、(l7cosθ3-l1,0,l7sinθ3)、(0,l1+l7cosθ4,l7sinθ4)。
(1)在Δ1>0的SOC1上,設定虛擬變量δ*,并求解中間變量γ。對于SOC1{-R11(-(4S))-R12⊥((4S))R21-},點b、d及轉動副R12的坐標由幾何法求得
(7)
(8)
(9)
注:*表示與虛擬角δ*有關,下同。
由cd=l4,建立約束方程:
整理并化簡得
Asinγ+Bcosγ+C=0
(10)

令tanγ/2=u,則有
(11)

(12)
(13)
則動平臺上R22的坐標為
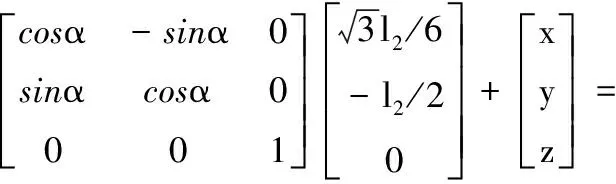
(14)
由式(8)、式(14),可得
(15)
同理,可得動平臺1上S10、S11的坐標:
(16)
(17)
由S10S9=l8,建立約束方程:
整理并化簡得
Esinα+Fcosα+G=0
(18)

令tanα/2=tα,解得
(19)
(3)在Δ3<0的SOC3上,建立約束方程。對于SOC3{-R4-S12-S11-},根據式(15)、式(17),由S11S12=l8,建立位置約束方程:

(20)
通過一維搜索,改變虛擬角δ*的賦值,直至滿足式(20),獲得真實的δ;將其代回位置正解求解式(6)~式(18),即可求出各個運動副位置的真實值,從而得到該機構的位置正解。
4.4 位置逆解求解
已知動平臺1上O′的坐標(x,y,z)和轉角α,求輸入角θ1、θ2、θ3、θ4。
4.4.1求機構各點坐標

根據式(12)、式(13),可得點b、d的絕對坐標:
(21)
(22)
球副S10、S11的絕對位置坐標,見式(16)、式(17)。
4.4.2建立位置相容方程
由桿長條件,建立以下位置約束方程:
(23)
(24)
(25)
(26)
4.4.3求輸入角θ1、θ2、θ3、θ4
由式(23)~(26),可得
(27)
i=1,2,3,4
t1=l3zdt2=l3zbt3=l7zS10t4=l7zS11

綜上可知,當動平臺O′的坐標(x,y,z)和轉角α已知時,輸入角θ1、θ2、θ3、θ4各有兩組解。故逆解數為16,因此,機構有16種構型。
4.5 正逆解驗證
參考ABB機器人I4R的結構參數,本機構的2個平行四邊形的尺寸參數取與之相同[19],即l1=l2=400 mm,l3=l5=l7=375 mm,l4=l8=800 mm,l6=100 mm,β=90°。
輸入角(θ1,θ2,θ3,θ4)分別取兩組數據:數據Ⅰ(43.211 5°,141.543 3°,111.793 3°,66.921 9°);數據Ⅱ(50°,120°,120°,60°)。
由MATLAB計算得機構位置正解,見表1。
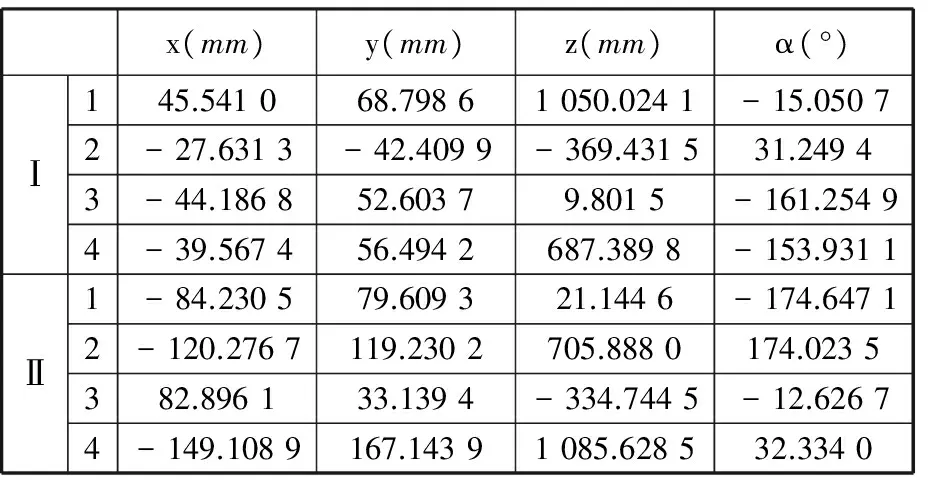
表1 機構的位置正解
取Ⅰ中第1組的正解數值,代入到逆解求解公式(式(27))中,得到θ1、θ2、θ3、θ4的16組逆解,如表2所示。
表2機構的位置逆解
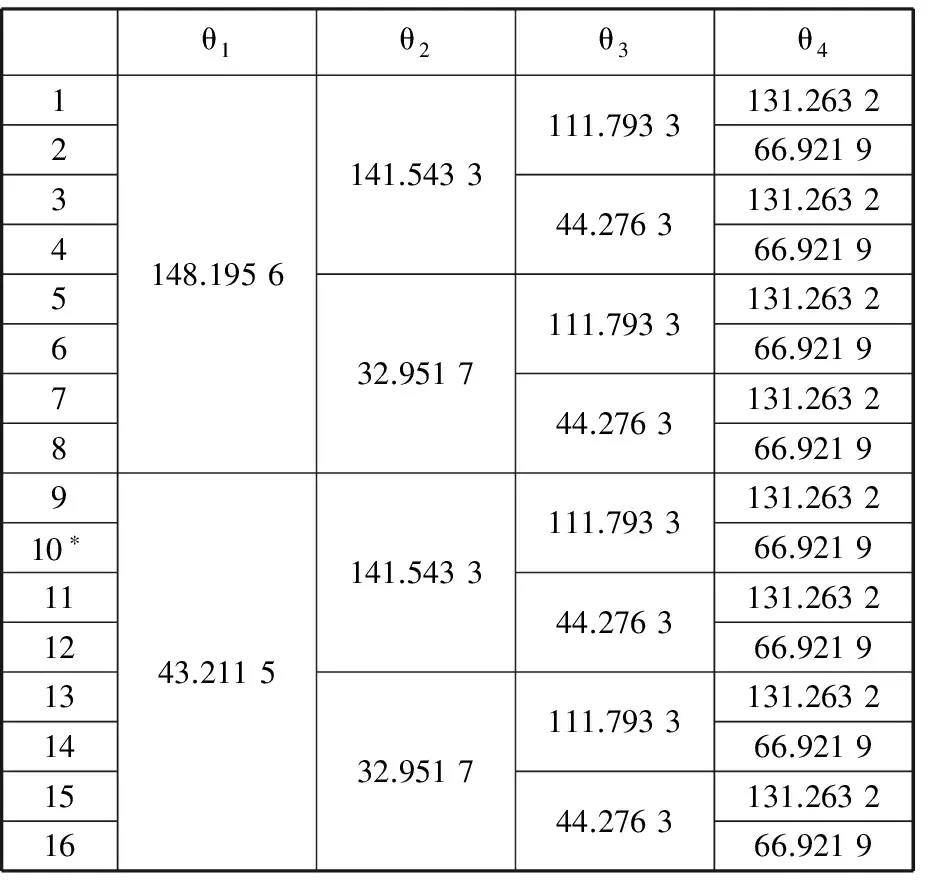
Tab.2 Numerical solutions of the inverse kinematics (°)
表2中,第10組數據θ1=43.211 5°,θ2=141.543 3°,θ3=111.793 3°,θ4=66.921 9°,和正解求解時第Ⅰ組的4個輸入角一致;同樣,用第Ⅱ組中的正解數據,也驗證了4個輸入角的一致性,因此,正逆解公式導出正確。
5 降耦機構的工作空間和轉角能力分析
5.1 工作空間分析
降耦機構動的工作空間分析,采用極坐標三維搜索法[20]。先將搜索范圍限制在:300 mm≤z≤1 200 mm,-π≤θ≤π,0≤ρ≤1 000 mm;運用MATLAB軟件編程,得到降耦機構工作空間的三維立體圖(圖5),圖6為Z向不同高度的X-Y截面圖。
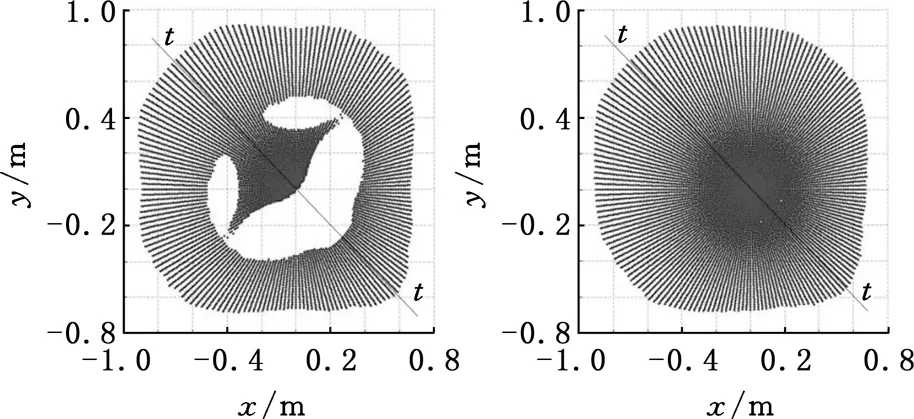
(a)z=300 mm(b)z=460 mm
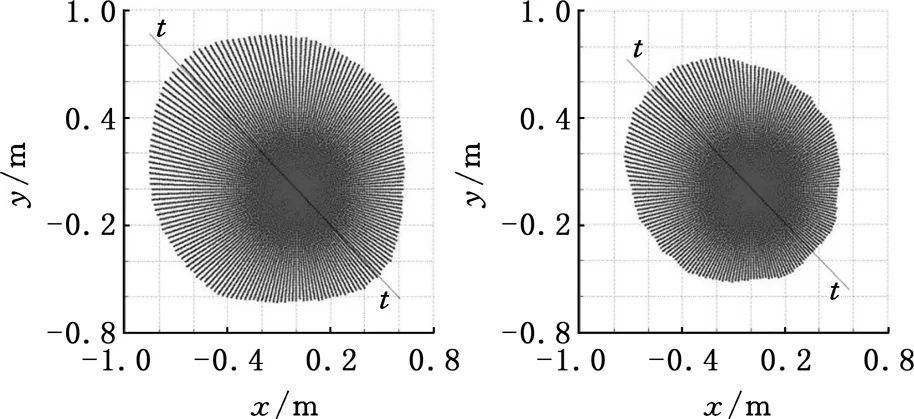
(c)z=700 mm(d)z=900 mm圖6 降耦機構工作空間的Z截面圖Fig.6 Cross-section of the workspace
圖5、圖6可以看出:
(1)該機構工作空間整體呈近似圓柱狀,對稱性較好,表面光滑。
(2)當300 mm≤z≤460 mm時,該機構的工作空間X-Y截面圖不連續,存在空洞;當460 mm≤z≤1 175 mm時,截面連續,且形狀比較規則,輪廓圓滑;從z=460 mm開始,隨著高度的增加,截面面積逐漸減小。
(3)與同類3T1R機構工作空間體積的比較,由文獻[19],不考慮轉動副的轉角約束,當高度500 mm≤z≤1 200 mm時,本文計算出I4R機構與降耦機構的工作空間體積分別為6.168 8×108mm3、7.556 3×108mm3;由文獻[21],當高度766 mm≤z≤1 016 mm時,Cross IV-3機器人與降耦機構工作空間體積分別為4.427 4×108mm3、5.152 9×108mm3。
因此,降耦機構比I4R、CrossIV-3工作空間分別增加了22.53%、16.39%。
5.2 轉動能力分析
轉動能力分析就是評估并聯機構動平臺的轉動角度范圍,當并聯機構動平臺基點處于工作空間內某一位置時,其姿態角存在一定范圍。根據逆解公式,采用極限邊界搜索法,可求出基點處于工作空間內任一點時的轉角范圍。
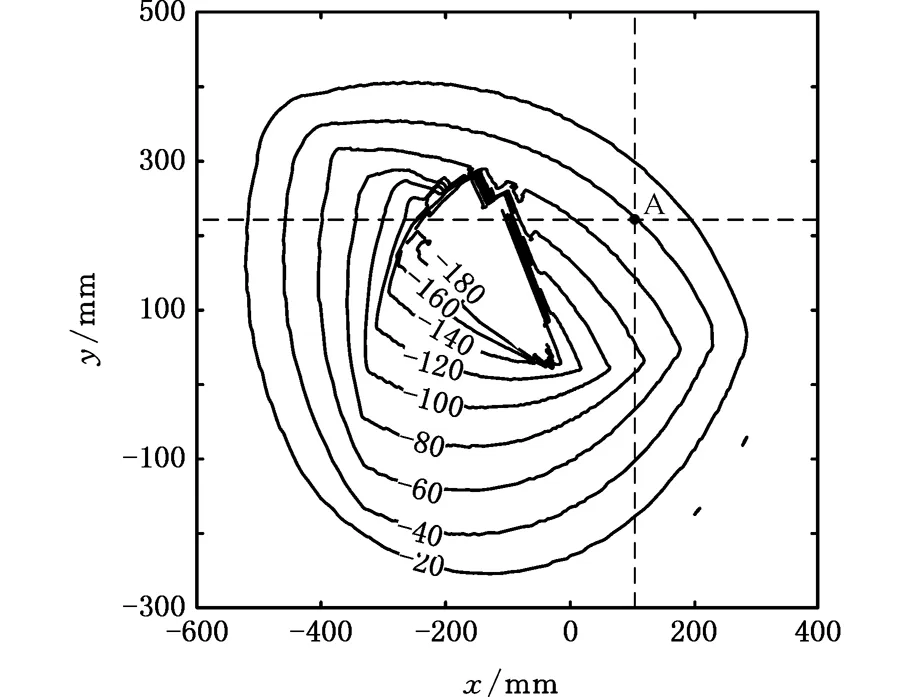
現取z=1 000 mm,分別計算降耦機構和H4機構[22](動平臺未加齒輪傳動)在工作空間內X-Y平面上各點轉角最大值αmax與最小值αmin(單位為(°))的分布,如圖7所示。
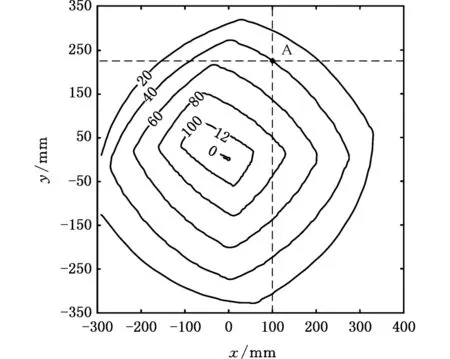
(a)H4機構的αmax分布
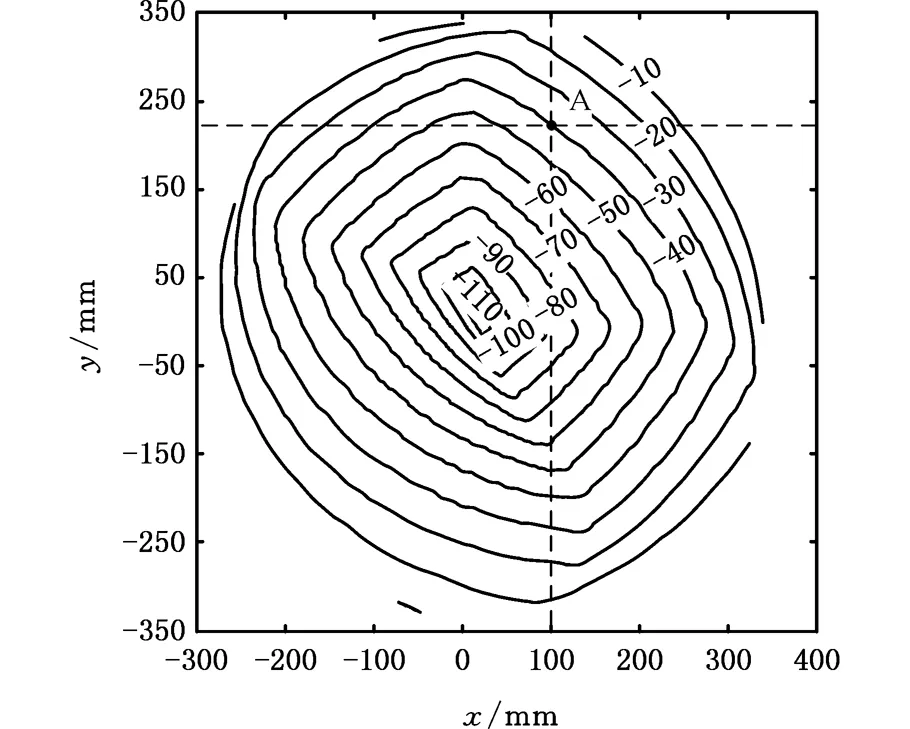
(b)H4機構的αmin分布
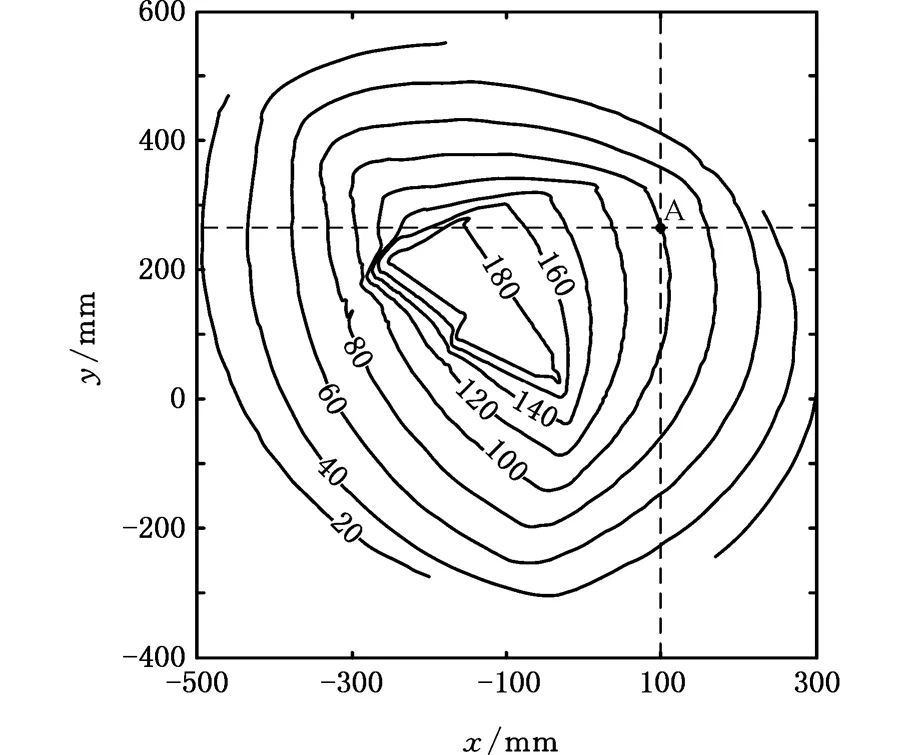
(c)降耦機構的αmax分布
(d)降耦機構的αmin分布
分別取兩機構工作空間內的相同位置,例:A(100,225,1 000),得H4機構、降耦機構在該點位置的轉角范圍分別為[-40°,40°](圖7a、圖7b)、[-40°,102°](圖7c、圖7d),因此,降耦機構轉角范圍增加了77.5%。
同樣,用該方法可求得這兩機構在工作空間內其他位置的轉角范圍,對比得:降耦機構的轉角范圍大,因此,降耦機構動平臺無需特殊轉動放大裝置,便可獲得較大的轉角范圍。
6 降耦機構的奇異性分析
6.1 機構奇異性分析方法


JpV=Jqω
(28)
Jq=diag(u11,u22,u33,u44)
f11=xd-xc
f12=yd-yc
f13=zd-zc
f21=xb-xa
f22=yb-ya
f23=zb-za
f31=xS10-xS9
f32=yS10-yS9
f33=zS10-zS9
f41=xS11-xS12
f42=yS11-yS12
f43=zS11-zS12
u11=(zd-zc)l3cosθ1-(xd-xc)l3sinθ1
u22=(zb-za)l3cosθ2-(yb-ya)l3sinθ2
u33=(zS10-zS9)l7cosθ3-(xS10-xS9)l7sinθ3
u44=(zS11-zS12)l7cosθ4-(yS11-yS12)l7sinθ4
依據Jp、Jq矩陣是否奇異,將機構的奇異位形分為如下三類:①det(Jq)=0時,機構發生輸入奇異;②det(Jp)=0時,機構發生輸出奇異;③det(Jq)=det(Jp)=0時,機構發生綜合奇異。
6.2 奇異性分析
6.2.1輸入奇異
當機構發生輸入奇異時,機構的動平臺將失去某個方向的運動能力,此時,至少有一個運動鏈到達了工作空間的邊界。此時det(Jq)=0,方程解的集合為
U={U1∪U2∪U3∪U4}
(29)
U1={(zd-zc)cosθ1-(xd-xc)sinθ1=0},即R11、c、d三點共線;
U2={(zb-za)cosθ2-(yb-ya)sinθ2=0},即R21、a、b三點共線;
U3={(zS10-zS9)cosθ3-(xS10-xS9)sinθ3=0},即R3、S9、S10三點共線;
U4={(zS11-zS12)cosθ4-(yS11-yS12)sinθ4=0},即R4、S12、S11三點共線;
例1 滿足子集U4的三維構型如圖8所示。
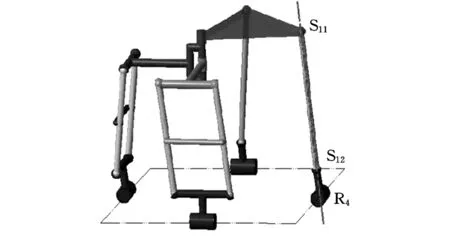
圖8 輸入奇異位形Fig.8 The input singularityof coulping-reducing PM
此時,支鏈R4-S12-S11已經到達該支鏈的運動極限位置,即動平臺已經到達機構工作的空間邊界。
6.2.2輸出奇異
當所有的主動件鎖住時,動平臺依舊可以產生局部運動,稱為機構發生輸出奇異。此時,若機構動平臺上作用有限的力,則主動件上將需無窮大的驅動力才能達到力平衡。矩陣Jp的每一行的前三個元素即對應一個向量,取
(f11,f12,f13)=cd
(30)
(f21,f22,f23)=ab
(31)
(f31,f32,f33)=S9S10
(32)
(f41,f42,f43)=S12S11
(33)
若det(Jp)=0,則向量cd、ab、S9S10、S12S11有如下兩種情況:①至少有兩個向量相互平行;②至少有三個向量線性相關。其中,兩個向量平行的幾何意義是:當ab∥S9S10時,有
式中,η為常系數。
整理得

(34)
對應的三維構型如圖9所示。
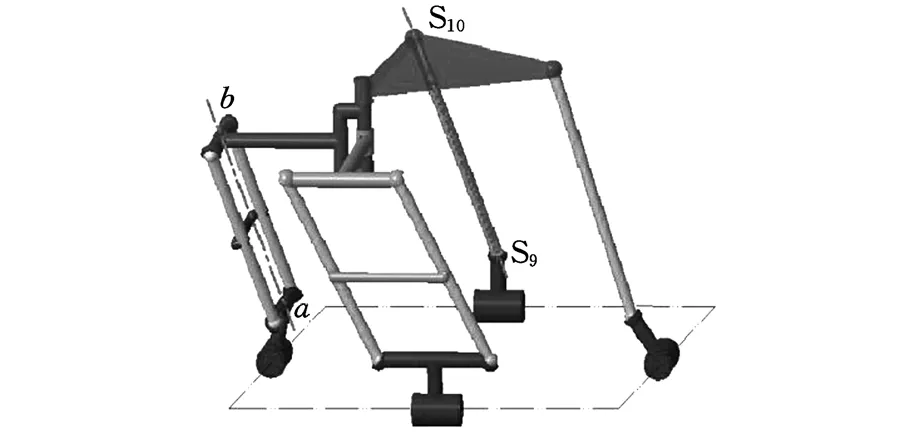
圖9 輸出奇異位形舉例(ab∥S9S10)Fig.9 Output singularity of coupling-reducing PM (ab∥S9S10)


即det(Jp)=0,對應的三維構型如圖10所示。
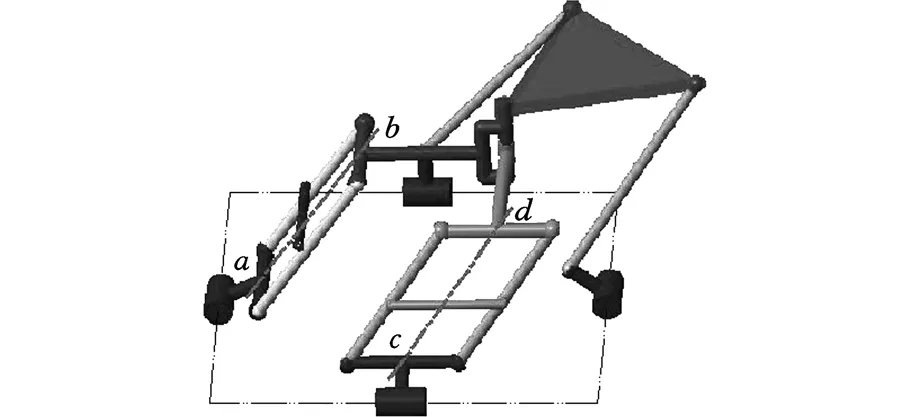
圖10 輸出奇異位形舉例(ab∥cd)Fig.10 Output singularity of coupling-reducing PM(ab∥cd)
6.2.3綜合奇異
綜合奇異時,det(Jq)=det(Jp)=0,即輸入奇異和輸出奇異同時發生。機構滿足U4且ab∥S9S10,則機構滿足R4、S12、S11三點共線且滿足式(33),其三維構型,如圖11所示。
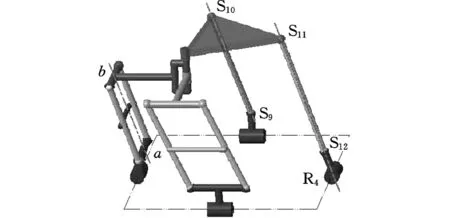
圖11 機構的綜合奇異位形舉例Fig.11 Synthetic singularity of coupling-reducing PM
7 結論
(1)設計出一種非全對稱、低耦合度(κ=1)的3T1R并聯操作手,并求解了其位置正逆解。
(2)工作空間分析表明:當460 mm≤z≤1175 mm時,該機構工作空間較規則,呈近似圓柱狀且連續;進一步,工作空間體積比相同參數的I4R機構大22.53%,比Cross IV-3大16.39%;同時,其轉角范圍大于同類3T1R的H4機構等。
(3)通過奇異位形分析,得到了降耦機構發生輸入奇異、輸出奇異和綜合奇異的條件。
(4)降耦機構含2條無約束支鏈,結構簡單、制造裝配方便,具有一定的研發價值。
[1] KRUT S,BENOIT M,OTA H,et al.I4:a New Parallel Mechanism for Scara Motions[C]//2003 IEEE International Conference on Robotics and Automation.Taipei,2003:1875-1880.
[2] KRUT S,NABAT V,PIERROT F.A High-speed Parallel Robot for Scara Motions [C]//2004 IEEE International Conference on Robotics and Automation.New Orleans,2004:4109-4115.
[3] NABAT V,RODRIGUEZ M,KRUT S,et al.Par4:Very High Speed Parallel Robot for Pick-and-place[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems.Edmonton,Canada,2005:553-558.
[4] KRUT S,NABAT V,PIERROT F.Heli4:a Parallel Robot for Scara Motions with a Very Compact Traveling Plate and a Symmetrical Design[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing,2006:1656-1661.
[5] 趙鐵石,黃真.欠秩空間并聯機器人輸入選取的理論和應用[J].機械工程學報,2000,36(10):81-85.
ZHAO Tieshi,HUANG Zhen.Theory and Application of Selecting Actuating Components of Spatial Parallel Mechanisms[J]. Chinese Journal of Mechanical Engineering,2000,36(10):81-85.
[6] 楊廷力,金瓊,劉安心.基于單開鏈單元的三移動一轉動并聯機器人機構型綜合及機構分類[J].機械工程學報,2002,38(8):1038-1043.
YANG Tingli,JIN Qiong,LIU Anxin.Structural Synthesis and Classification of the 3dof Translational Parallel Robot Mechanisms Based on the Units of Single-opened-chain[J]. Chinese Journal of Mechanical Engineering,2002,38(8):1038-1043.
[7] 黃田,趙學滿,梅江平,等.一種具有三維平動一維轉動的并聯機構: 中國,ZL201220007884.X[P]. 2012-11-14.
HUANG Tian,ZHAO Xueman,MEI Jiangping,et al.A Parallel Mechanism with Three Translations and One Rotation: China,ZL201220007884.X[P].2012-11-14.
[8] 劉辛軍,謝富貴,王立平,等.一種可實現SCARA運動的四自由度單動平臺并聯機構: 中國,201210435375.1[P].2012-11-02.
LIU Xinjun, XIE Fugui, WANG Liping, et al.A Kind of Four Degrees of Freedom of Moving Platform Parallel Mechanism with SCARA Exercise: China,201210435375.1[P].2012-11-02.
[9] FANG Y F,TSAI L W.Structural Synthesis of 4-DOF and 5-DOF Parallel Manipulators with Identical Limbs[J].The International Journal of Robotics Research,2002,21(9):799-810.
[10] ANCUTA A,COMPANY O,PIERROT F.Design of Lambda-Quadriglide:a New 4-DOF Parallel Kinematics Mechanisms for Sch?nflies Motion[C]//Proceedings of the ASME 2010 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference. Montreal,2010:1131-1140.
[11] RICHARD P L,GOSSELIN C,KONG X.Kinematic Analysis and Prototyping of a Partially Decoupled 4-DOF 3T1R Parallel Manipulator[C]//ASME International Design Engineering Technical Conferences & Computers & Information in Engineering Conference. Philadelphia,2006:1029-1036.
[12] 沈惠平,曾氫菲,李菊,等.典型并聯機構拓撲結構特征分析[J].農業機械學報,2016,47(8):388-398.
SHEN Huiping,ZENG Qingfei,LI Ju,et al.Topological Characteristic Analysis for Practical Parallel Mechanisms [J].T. Chin. Soc. Agric. Mach.,2016,47(8):388-398.
[13] 楊廷力,劉安心,羅玉峰,等.機器人機構拓撲結構設計[M].北京:科學出版社,2012.
YANG Tingli,LIU Anxin,LUO Yufeng,et al.Theory and Application of Robot Mechanism Topology [M]. Beijing:Science Press,2012.
[14] 沈惠平,楊廷力,朱小蓉,等.一種三平移一轉動并聯機器人:中國,201510564382.5[P].2015-09-08.
SHEN Huiping,YANG Tingli,ZHU Xiaorong,et al.A Parallel Mechanism with Three Translations and One Rotation: China,201510564382.5[P].2015-09-08.
[15] YANG Tingli,LIU Anxin,SHEN Huiping,et al. Topological Structure Synthesis of 3T1R Parallel Mechanism Based on POC Equations[C]//Proceedings of 9th International Conference on Intelligent Robotics and Applications. Tokyo,2016:147-161.
[16] 沈惠平,尹洪波,王振,等.基于拓撲結構分析的求解6-SPS并聯機構位置正解的研究[J].機械工程學報,2013,49(11):14-20.
SHEN Huiping,YIN Hongbo,Wang Zhen,et al. Research on Forward Position Solutions for 6-SPS Parallel Mechanisms Based on Topology Structure Analysis[J]. Journal of Mechanical Engineering,2013, 49(11):14-20.
[17] 沈惠平,朱小蓉,尹洪波,等.并聯機構的結構降耦原理及其設計方法[J].機械工程學報,2016,52(23):102-113.
SHEN Huiping,ZHU Xiaorong,YIN Hongbo,et al. Study on the Principle and Design method for Structure Coupling-reducing of Parallel Mechanisms[J].Journal of Mechanical Engineering,2016,52(23):102-113.
[18] 李菊,沈惠平,強恒存,等.一種低耦合度三運動副動平臺的三平移一轉動并聯機器人平臺:中國,201610141614.0[P].2016-03-15.
LI Ju,SHEN Huiping,QIANG Hengcun,et al. A Low Coupling DegreeParallel Robot Platform with Three Translations and One Rotation: China, 201610141614.0[P]. 2016-03-15.
[19] 劉平松.I4R型并聯機器人全域性能及其優化研究[D]. 南京:南京理工大學,2013.
LIU Pingsong.Global Performance and Optimization of I4R Parallel Robot[D].Nanjing :Nanjing University of Science and Technology,2013.
[20] 黃真,孔令富,方躍法.并聯機器人機構學理論及控制[M].北京:機械工業出版社,1997.
HUANG Zhen,KONG Lingfu,FANG Yuefa.Parallel Robot Mechanism Theory & Control[M].Beijing:China Machine Press,1997.
[21] 李玉航,梅江平,劉松濤,等.一種新型4自由度高速并聯機械手動力尺度綜合[J].機械工程學報,2014,50(19):32-40.
LING Yuhang,MEI Jiangping,LIU Songtao,et al. Dynamic Dimensional Synthesis of a 4-DOF High-speed Parallel Manipulator[J]. Journal of Mechanical Engineering,2014,(19):32-40.
[22] XIE Fugui,LIU Xinjun.Design and Development of a High-Speed and High-Rotation Robot with Four Identical Arms and a Single Platform[J].Mechanisms and Robotics,2015,7 (4): 041015.