物流倉儲自動拖車系統分析與設計
2018-02-02 15:39:00許哲文
中國新技術新產品 2018年2期
許哲文

摘 要:本文基于逆平行四桿機構設計了一種物流倉儲自動拖車系統。該系統由拖車機構和自動化拖車測控系統組成。在分析對比逆平行四桿機構與普通平行四桿機構的特性之后,最終選用逆平行四桿機構,使本文設計的拖車的轉向半徑為一般拖車的一半,拓寬了其應用范圍。同時針對作業環境特點在牽引車上應用多種傳感器來實現自動控制,使拖車能轉向避障并進行平穩的運動。論文完成了一種能簡單運輸且安全高效、環境適應性強的自動化拖車的設計。
關鍵詞:拖車;逆平行四桿機構;牽引車;轉向半徑
中圖分類號:F252 文獻標志碼:A
0 引言
當下,隨著網購日益成為民眾生活中重要的一部分,人們對快遞的完好和送達速度有了更高的要求。而此時物流倉儲扮演著相當關鍵的角色,但是物流分揀自動化水平較低、包裹運輸安全等多個問題都在困擾我國物流倉儲行業。因此目前物流行業急需一種能夠代替工人進行簡單運輸且安全高效的自動化拖車。針對物流倉儲存在著的問題,本文分析并設計了一種物流倉儲自動拖車系統。
在結構優化設計方面,本文應用了逆平行四桿機構來減小拖車轉向半徑。四桿機構因其結構簡單,成本低而被廣泛應用,文獻中關于生產生活中的四桿機構的研究有很多。曹烈以阿克曼原理為研究基礎,對四輪拖車梯形結構分析了誤差存在的原因。黃健、張昊克服了常見平行四邊形機構的死點問題。孫文剛對飛機牽引車轉向系統的研究,提高了牽引車轉向性能。本文借鑒前人經驗,選用一種四桿轉向機構來進行優化。在自動化設計方面,我們采用自動牽引車方案。設計了一套自動控制系統,應用傳感器配合控制器實現自動避障運輸,最終達到拖車安全快速準確地到達目標位置的自動化目標。
本文設計的物流倉儲自動拖車系統實現了自動化的目標,提高物流倉儲工作效率,發展并完善物流倉儲業,并為其他物流倉儲系統的分析與設計提供了一個切實可行的思路。希望本文的研究為今后該領域的研究貢獻一份力量。
1 拖車結構設計
根據對市場上常見的拖車種類進行調查,發現其轉向機構主要包括梯形機構和平行四邊形機構。其中梯形機構能夠使拖車轉向時左右前輪得到合理的偏轉角匹配,從而避免或減少輪子的側滑,延長了輪子使用壽命。但是在實際工作中,由于原理誤差的存在,無法實現拖車轉向的純滾動。而采用平行四邊形機構的拖車存在著轉向半徑大的問題,無法在狹小的空間內進行工作。本文應用四桿機構中的逆平行四邊形機構改善了該問題,并實現了其機構設計。
本文基于逆平行四邊機構為物流拖車設計了一種轉向機構,其特點在于前后軸在車體發生轉向時能夠協同運動,從而達到減小拖車轉向半徑的目的,解決了現存拖車轉向半徑大的問題。
該機構由車身(機架)、轉向基座、連桿、滑塊、車輪軸組成。轉向基座鉸接于車身底部前后兩端,兩車輪軸鉸接于前后轉向基座。兩轉向基座相向面設置鉸鏈,并通過連桿進行連接。該機構中有構件5個,低副7個,高副0個,故機構自由度計算式(1)。
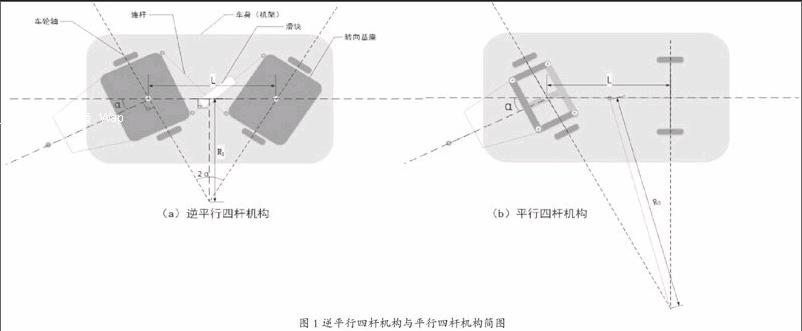
該機構在轉向過程中,因逆平行四邊機構兩曲柄反向轉動的特性,前后輪產生相反的轉向,使得轉向中心與前后輪動的距離減小,即減小了轉向半徑,如圖1(a)所示。
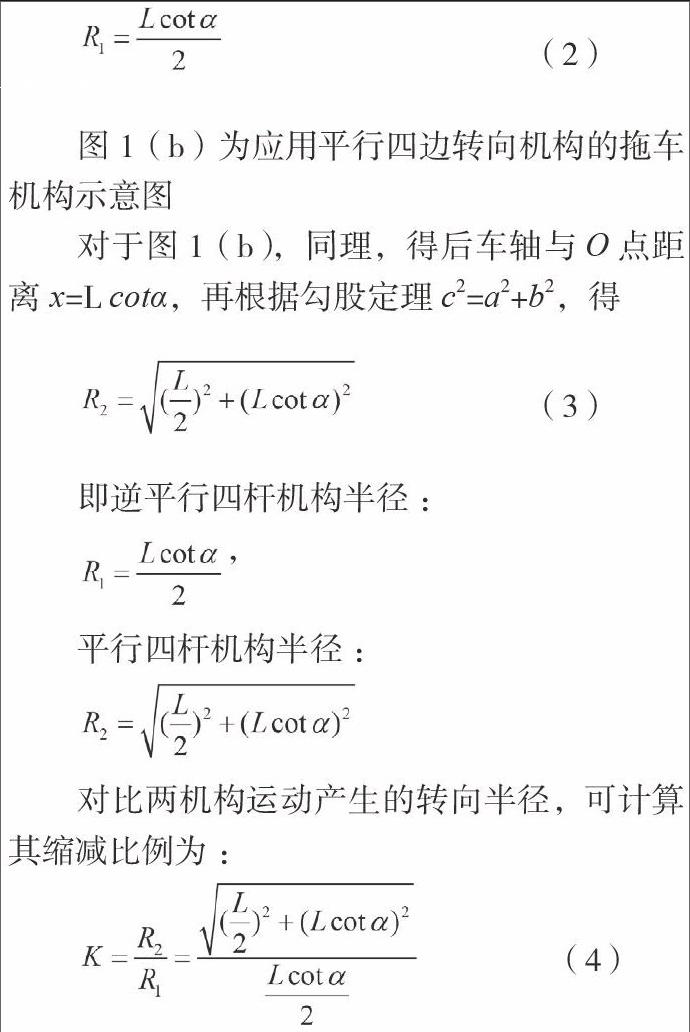
設拖車期望路徑偏移量為α,兩轉向基座軸距為L,兩車軸延長線相較于點O。則由圖1(a)所示的幾何關系可知,R1與轉向基座側邊垂直。由圖中余角關系,得兩車軸延長線夾角為2α,
通過不等式放縮式4,得Kmin=2。經上述比較計算可知,當拖車軌跡偏移量相同時,應用逆平行四桿機構的拖車轉向半徑更小。
2 拖車運動分析
對圖1所設計逆平行四桿轉向機構進行抽象,繪制其機構簡圖及其坐標系,如圖2所示。對其進行速度分析,分析其轉向運動特點。
首先根據圖2所示的逆平行四邊坐標系對該逆平行四邊機構進行矢量建模,創建矢量l0,l1,l2,l3來表示各構件。設各矢量的正方向與x軸正方向的夾角為θi(i=1,2,3,0)。從而建立位移方程:
經上述分析計算可知,逆平行四桿機構搖桿與曲柄,即l1與l3,運動時等速反向。
3 控制系統設計
本文設計優化了一種小轉向半徑的拖車機構,并為其設計了一套與之匹配的自動化拖車測控系統。該系統由牽引車及拖車構成,針對其作業環境特點在其上添加了傳感器,以達到自動控制的目的。基于逆平行四桿機構設計的物流倉儲自動拖車的測控系統由控制器、驅動器、傳感器、直流電機和執行機構等部分組成,如圖3所示。
在此系統中,牽引車的前、左、右三面都安裝紅外距離傳感器,在運動過程中傳感器將外界距離信號反饋傳輸給控制器。當小車與左(右)側障礙物距離較近時,控制器收到信號控制驅動器,使得左(右)側電機轉速提高,從而使小車向右(左)側行駛;當小車與前方障礙物距離較近時,控制器收到信號控制驅動器,使得左右兩側電機轉速降低,從而使小車減速行駛。上述傳感器的控制作用,使小車在牽引車的牽引下實現轉向避障。
4 結論與展望
本文設計了一種物流倉儲自動拖車系統,并應用逆平行四桿機構優化了拖車的轉向機構以實現拖車的小半徑轉向功能。本文首先對拖車的轉向機構進行了機構優化設計,降低了一般拖車50%的轉向半徑,使其能夠在狹小的環境中進行作業,并分析了該機構的運動特點。同時為該拖車設計了一套自動控制系統,應用多種傳感器,通過接收外界信號來完成自動化控制。本文所完成的機構優化僅應用了四桿機構,在今后的研究中,可以采用六桿或者其他多機構組合的優化方式對該機構進行再優化。
參考文獻
[1]曹烈.四輪拖車轉向梯形機構分析[J].科技資訊,2015,13(34):109-109.
[2]黃健,張昊,周國軍,等.開門機構中反平行四邊形機構的性能分析[J].機械工程師,2013(4):4-5.
[3]孫文剛.飛機牽引車轉向系統研究[D].長安大學,2008.
[4]曹烈.地面設備拖車轉向梯形機構分析[C].沈陽科學學術年會, 2015.
