基于改進(jìn)RBF—PID的板球系統(tǒng)位置控制
2018-02-01 11:51:26苑仁令向鳳紅毛劍琳郭寧
軟件導(dǎo)刊 2018年1期
苑仁令+向鳳紅+毛劍琳+郭寧

摘要:板球系統(tǒng)是一個(gè)典型的多變量、不確定、強(qiáng)耦合的非線性系統(tǒng),一直被國(guó)內(nèi)外許多學(xué)者作為研究非線性控制系統(tǒng)的實(shí)驗(yàn)平臺(tái)。通過動(dòng)力學(xué)分析得到板球系統(tǒng)的數(shù)學(xué)模型和相應(yīng)的簡(jiǎn)化模型,針對(duì)系統(tǒng)響應(yīng)速度慢的問題,在原RBF-PID控制PID參數(shù)調(diào)整采用梯度下降法的基礎(chǔ)上,引入加速率的概念加快系統(tǒng)響應(yīng)速度。實(shí)驗(yàn)結(jié)果表明,該控制算法可使控制誤差縮小在2mm以內(nèi),控制時(shí)間也減少了2.8s,且具有較好的魯棒性。
關(guān)鍵詞:板球系統(tǒng);RBF神經(jīng)網(wǎng)絡(luò);PID;加速率;位置控制
DOIDOI:10.11907/rjdk.172078
中圖分類號(hào):TP319
文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào)文章編號(hào):1672-7800(2018)001-0169-03
Abstract:Ball and plate system is a typical multivariable, uncertain and strongly coupled nonlinear system. It has been used by many scholars at home and abroad to study the experimental platform of nonlinear control system. In this paper, the mathematical model of the ball and plate system and the corresponding simplified model are obtained by the kinetic analysis. In the case of system slow response, the concept of acceleration is introduced on the basis of the gradient descent method in the original RBF-PID control PID parameter to speed up the system's response speed. The experimental results show that the control algorithm can reduce the control error within 2mm, the control time is reduced by 2.8s and has good robustness.
Key Words:ball and plate system; RBF neural network; PID;acceleration rate; position control
0引言
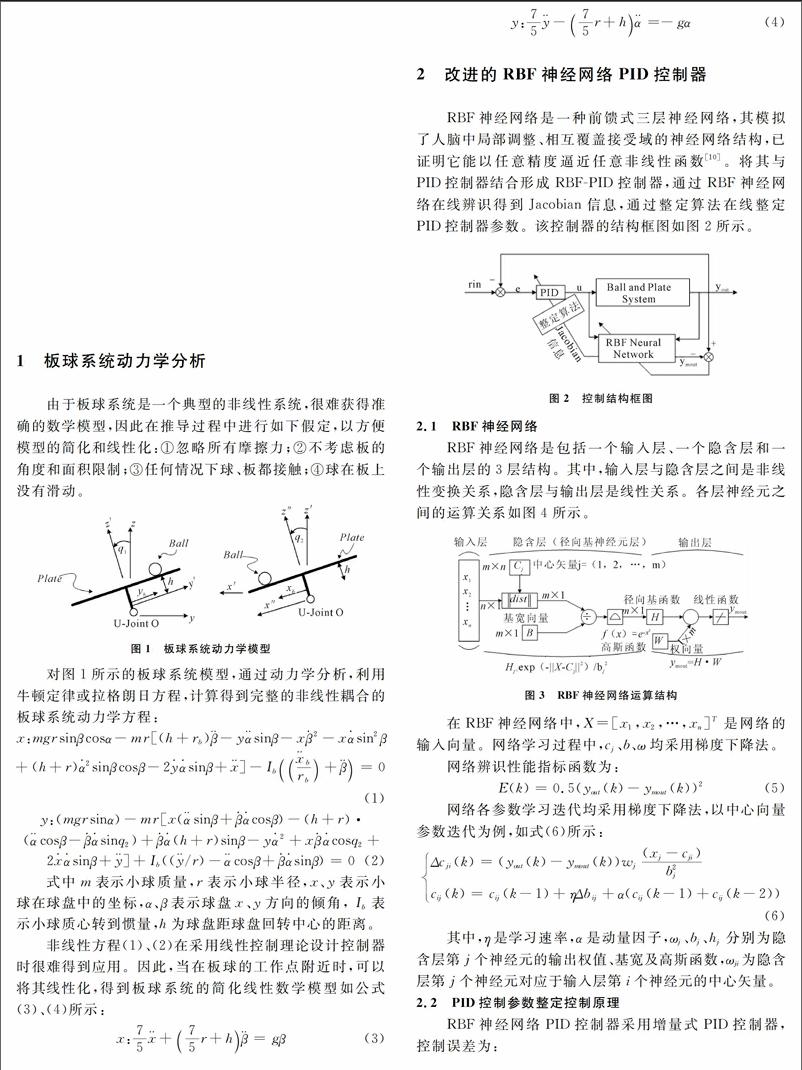
板球系統(tǒng)是一個(gè)多變量、強(qiáng)耦合和不確定性的非線性動(dòng)態(tài)系統(tǒng),主要用于學(xué)習(xí)和研究各種控制算法[1-2]。其控制目的是控制自由滾動(dòng)的小球運(yùn)動(dòng)到指定位置或按照給定軌跡運(yùn)動(dòng)。通過對(duì)板球系統(tǒng)進(jìn)行控制算法的研究,以期為化學(xué)熱反應(yīng)、航空航天領(lǐng)域等危險(xiǎn)性較高的控制系統(tǒng)找到穩(wěn)定的解決方案。
本文以固高GBP2001型系統(tǒng)作為研究對(duì)象,PID控制具有算法簡(jiǎn)單、易于實(shí)現(xiàn)、穩(wěn)定性好等優(yōu)點(diǎn),在板球系統(tǒng)控制中得到了廣泛應(yīng)用。由于實(shí)際系統(tǒng)的耦合性、非線性和不確定性,以及PID參數(shù)整定方法復(fù)雜和需要精確的數(shù)學(xué)模型等,PID控制在實(shí)際系統(tǒng)控制中效果并不理想[3-4]。神經(jīng)網(wǎng)絡(luò)以其強(qiáng)大的非線性映射能力、并行處理能力和自學(xué)習(xí)能力,能很好地適用于非線性不確定系統(tǒng)控制[5-6]。針對(duì)RBF神經(jīng)網(wǎng)絡(luò)整定PID參數(shù)采用梯度下降法,導(dǎo)致在控制初期學(xué)習(xí)速度慢、適應(yīng)能力差等缺點(diǎn),國(guó)內(nèi)外學(xué)者提出了很多改進(jìn)算法[7-12]。文獻(xiàn)[7]采用粒子群算法優(yōu)化RBF神經(jīng)網(wǎng)絡(luò),不僅改善了神經(jīng)網(wǎng)絡(luò)性能,也提高了PID控制器性能;在RBF神經(jīng)網(wǎng)絡(luò)參數(shù)調(diào)整和PID參數(shù)調(diào)整中,文獻(xiàn)[8]引入動(dòng)量因子和增速率的概念,減輕了系統(tǒng)震蕩,且較傳統(tǒng)PID控制具有更好的魯棒性和較快的響應(yīng)速度;文獻(xiàn)[9]應(yīng)用Levenberg Marquardt算法代替梯度下降法整定PID參數(shù),使控制系統(tǒng)的速度明顯提高;文獻(xiàn)[10]基于切換控制策略,利用RBF神經(jīng)網(wǎng)絡(luò)控制PID參數(shù),并將其應(yīng)用到板球控制系統(tǒng)中,縮短了系統(tǒng)控制時(shí)間,控制精度也得到一定程度提高;文獻(xiàn)[11]利用傳統(tǒng)PID、模糊控制、RBF神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn)設(shè)計(jì)了模糊RBF神經(jīng)網(wǎng)絡(luò)PID控制器,將其應(yīng)用到高頻感應(yīng)加電源控制中,通過仿真實(shí)驗(yàn)驗(yàn)證了該控制算法具有較好的適應(yīng)性和魯棒性;文獻(xiàn)[12]采用粒子群算法優(yōu)化模糊RBF結(jié)構(gòu),增強(qiáng)其學(xué)習(xí)能力,將優(yōu)化后的模糊RBF神經(jīng)網(wǎng)絡(luò)整定PID參數(shù),并且應(yīng)用到板球系統(tǒng)中。仿真結(jié)果表明,該算法提高了板球系統(tǒng)的軌跡跟蹤精度與魯棒性。
本文借鑒已有的文獻(xiàn)算法,針對(duì)提高實(shí)物系統(tǒng)精度和縮短系統(tǒng)控制時(shí)間進(jìn)行了研究,在PID參數(shù)整定過程中引入增速率概念,加快系統(tǒng)的響應(yīng)速度,進(jìn)而將本文算法應(yīng)用到GBP2001型板球系統(tǒng)位置控制實(shí)驗(yàn)中。
由圖可得出,PID控制時(shí),小球到達(dá)球盤中心的時(shí)間為14.4s,小球穩(wěn)定在球盤中的坐標(biāo)為(2.9,3.0),誤差較大;RBF-PID控制時(shí),小球到達(dá)球盤中心的時(shí)間為14.3s,系統(tǒng)控制時(shí)間較長(zhǎng),小球穩(wěn)定在球盤中的坐標(biāo)為(1.5,1.6);IRBF-PID控制時(shí),小球到達(dá)球盤中心的時(shí)間為11.6s,小球穩(wěn)定在球盤中的坐標(biāo)為(1.294 7,0.018 6)。本文的改進(jìn)算法相比于PID控制和RBF-PID控制算法,其控制小球到達(dá)指定點(diǎn)的時(shí)間縮短了2.8s,控制精度誤差也小于2mm。
4結(jié)語
本文針對(duì)固高GBP 2001型板球系統(tǒng)建立了一個(gè)比較簡(jiǎn)單的數(shù)學(xué)模型,并對(duì)板球系統(tǒng)的位置控制進(jìn)行研究,采用視覺檢測(cè)技術(shù)實(shí)時(shí)反饋小球的位置信息,分別完成了PID控制、RBF-PID控制及IRBF-PID控制的板球系統(tǒng)位置控制試驗(yàn)。結(jié)果表明,本文設(shè)計(jì)的IRBF-PID控制算法與傳統(tǒng)PID控制及RBF-PID控制算法相比,提高了系統(tǒng)響應(yīng)速度,在控制精度上也有所提高,因此具有一定實(shí)用價(jià)值。endprint
參考文獻(xiàn):
[1]韓京元,田彥濤,孔英秀,等.板球系統(tǒng)的間接模糊自適應(yīng)控制[J].控制與決策,2015(2):303-310.
[2]史智慧,劉楓,祁虔.基于視覺檢測(cè)板球系統(tǒng)的變論域模糊控制研究[J].西南師范大學(xué)學(xué)報(bào):自然科學(xué)版,2017,42(2):148-152.
[3]ROY P. Design of a fractional order PD controller tuned by firefly algorithm for stability control of the nonlinear ball and plate system[C].IEEE International Conference on Advanced Communication Control and Computing Technologies,2014.
[4]ROY P, KAR B, HUSSAIN I. Trajectory control of a ball in a ball and plate system using cascaded PD controllers tuned by PSO[C].Proceedings of Fourth International Conference on Soft Computing for Problem Solving. Springer India, 2015:53-65.
[5]張旭.三種RBF神經(jīng)網(wǎng)絡(luò)比較分析[J].軟件導(dǎo)刊,2013,12(4):34-36.
[6]徐磊,樊國(guó)磊,王超.RBF-PID控制器在傾斜搖擺試驗(yàn)臺(tái)中的應(yīng)用[J].軟件導(dǎo)刊,2014(3):21-22.
[7]朱衛(wèi)云,付東翔,葛懂林,等.基于RBF神經(jīng)網(wǎng)絡(luò)的永磁同步伺服電機(jī)控制系統(tǒng)[J].電子科技,2016,29(1):161-164.
[8]吳曉明,馬立廷,鄭協(xié),等.改進(jìn)的RBF神經(jīng)網(wǎng)絡(luò)PID算法在電液伺服系統(tǒng)中應(yīng)用[J].機(jī)床與液壓,2015,43(11):63-66.
[9]蔡滿軍,劉建軍,劉明坤.基于RBF網(wǎng)絡(luò)自整定PID控制的改進(jìn)算法[J].控制工程,2008,15(1):15-17.
[10]ZHENG F, LI X, WANG S, et al. Position control of ball and plate system based on switching mechanism[C].IEEE International Conference on Automation and Logistics, 2011:233-237.
[11]付光杰,張微微,牟海維.基于模糊RBF網(wǎng)絡(luò)高頻感應(yīng)加熱電源控制的研究[J].化工自動(dòng)化及儀表,2014,41(4):357-361.
[12]XIUCHENG DONG, YUNYUAN ZHAO, YUNYUN XU, et al.Design of PSO fuzzy neural network control for ball and plate system[J]. International Journal of Innovative Computing, Information and Control,2011,7(12):7091-7103.
(責(zé)任編輯:黃健)endprint