基于人工魚群的風機故障診斷方法
2018-01-25 10:52:38孫潔連暢
物聯網技術 2018年1期
關鍵詞:故障診斷
孫潔 連暢
摘 要:為了提高風機故障檢測準確率并改善風機系統振動故障復雜性較高的問題,文中提出了基于人工魚群的風機故障診斷方法。人工魚群算法結構簡單,具有良好的并行性、快速性等優點,但易陷入局部最優。為解決這一問題,在人工魚群算法的基本原理上提出了基于差分進化算法和人工魚群算法相融合的混合算法,在人工魚群算法中引入了交叉變異策略,使原始種群能夠不斷優化,提高了全局尋優的能力。試驗表明,相對于其他檢測方法,改進的人工魚群算法的識別率及計算效率均有所提高,對風機早期故障的診斷效果較佳。
關鍵詞:風機;故障診斷;人工魚群;局部最優;差分進化算法
中圖分類號:TP39;TD441 文獻標識碼:A 文章編號:2095-1302(2018)01-00-03
0 引 言
隨著科技的不斷進步和發展,風機發展也體現出高速化、復雜化和智能化的趨勢,其結構和組成亦隨之變的更加復雜。一方面,如果風機故障時有發生,那么企業將遭受非常嚴重的經濟損失;另一方面,如若風機系統發生故障,往往還會導致人身安全損傷和環境污染等后果。因此,對風機故障進行準確診斷不僅具有重大經濟效益還具有良好的社會效義[1-3]。為了對風機早期故障進行有效診斷,需要運用部分算法對故障數據進行有效的分類和提取。人工魚群算法不僅具有自組織性和自適應性等特點,還具有搜索速度快、參數少、易于實現等優點[4],目前在故障診斷、圖像處理等領域的應用取得了一定成果。
文中首先利用小波包對振動信號進行提取,再利用經差分進化算法改進后的人工魚群算法對風機故障進行快速、準確地診斷改進。
1 故障分析理論
1.1 小波包熵特征提取
風機故障發生時的振動信號若存在于不同的頻帶上,那么其所具有的能量分布亦不同。因此,在風機發生故障時,我們可以以不同頻帶能量特征的差異為根據對故障進行識別。
小波包變換可將時域中的問題轉換到頻域上進行分析,并能夠保持問題信息的完整性[5,6]。小波包熵提取的具體步驟如下:
(1)原始信號在經過4 層小波包分解后,能夠獲得16個頻帶上的信號特征。
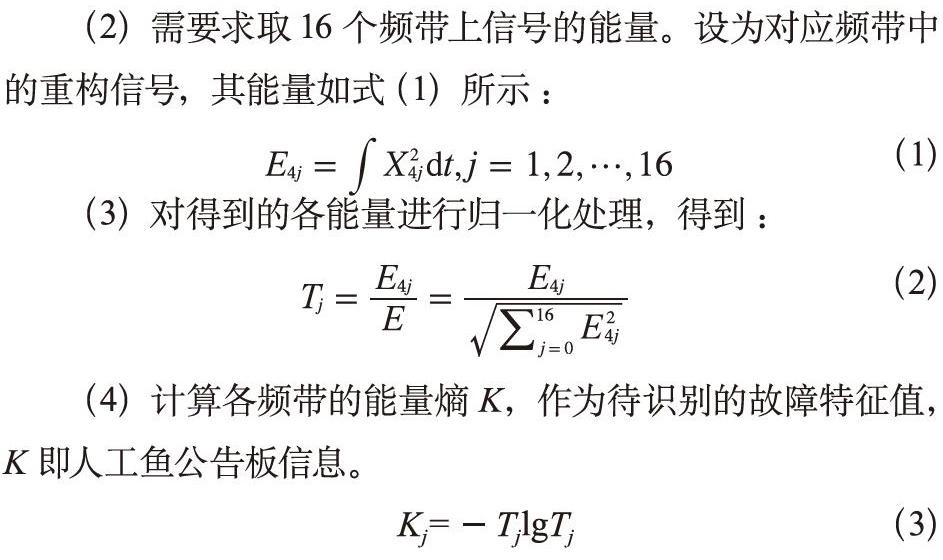
(2)需要求取16個頻帶上信號的能量。設為對應頻帶中的重構信號,其能量如式(1)所示:
(3)對得到的各能量進行歸一化處理,得到:
(4)計算各頻帶的能量熵K,作為待識別的故障特征值,K即人工魚公告板信息。
1.2 人工魚群算法
人工魚群算法(Artificial Fish Swarm Algorithm,,AFSA)是李曉磊博士受魚群行為的啟發,于2002年提出的一種新型智能仿生優化算法。在水中,魚總是能夠自行游動亦或尾隨其他魚游動,找到含營養物質最多的地方,因此可以推知,在營養物質多的區域中相應所含魚的數目也最多[7-9]。根據魚群這一特點來進行人工魚群對魚群覓食、聚群和追尾行為的模仿,通過模仿實現尋優。
個體魚的狀態用X=(x1,x2,…,xn)描述, 其中xi(i=1,2,…,n)表示尋優變量,通過人工魚所在位置營養物質濃度的大小,即使用目標函數值Y=f(X)來判斷個體優劣。人工魚個體間距用dij=‖Xi-Xj‖表示;Visual表示人工魚可見范圍;Step為人工魚所移動步長的最大值;δ表示擁擠度因子。
(1)覓食行為即人工魚不斷向富含營養物質較多的區域移動的行為,是向更優區域移動的迭代方式。人工魚Xi代表在一個可見區域內以隨機選擇的方式所選擇的一條人工魚,其狀態設置為Xj,若其目標函數值Yj比當前值更優,則朝Xj所在方向游動一步;否則,將再次重新隨機選擇一個Xj,重復嘗試trynumber次,若所得目標函數值仍然不具備前進所需的條件,則向任意方向隨機游動一步。
(2)聚群行為是人工魚向魚群中心方向游動并避免過分擁擠的一種行為。人工魚的狀態設為Xi,將當前可見區域內(即di,j≤Visual)的伙伴數量和中心位置分別用nf和Yc表示,如果出現Yc?nf>δYi且Yi (3)追尾行為即一種魚群個體朝著可見范圍內最優個體所在方向游動,并避免過分擁擠的行為。人工魚Xi在可見區域內搜索最優伙伴,即在可見區域內的所有人工魚中尋找適應度值最高的個體Xj,若出現Yc?nf>δYi且Yi (4)公告板即人工魚在每完成一次迭代后都進入一個新的狀態,將之與公告板中所記錄的狀態進行對比,若新狀態更優,則公告板信息會更新為新狀態。迭代結束后,輸出更新后的公告板記錄,該記錄即為所求的最優值。 2 改進人工魚算法在風機故障檢測中的研究 2.1 差分進化算法 自差分進化算法(Differential Ev,DE)[10]作為近年來新興算法中的一種,對個體的最優解擁有較好的記憶能力,同時也可共享種群內部信息。相較于其他不同的算法,對于求解比較復雜的全局優化問題,DE的優勢更加明顯,性能更加優越,具有受控參數少,優化過程簡單,魯棒性強等優點[11,12],使得DE被看作是仿生智能計算算法產生后,在算法結構方面獲取的一項重要成果。 2.2 對人工魚算法的改進 當魚群算法進入后期階段,在公告板進行了連續多次的迭代后,公告板將出現信息并未更新或更新變化非常小的問題,即尋優過程陷于停滯狀態,導致出現陷入局部最優的問題。對此本文使用DE算法中的交叉、變異策略,當公告板的停滯狀態大于最大停滯參數時,選擇部分人工魚個體對其實施DE交叉操作和變異操作[13],以產生新的個體。對比產生的新個體和當前目標函數值,將對比結果與公告板的狀態再次進行比較,若對比結果優于公告板記錄,則更新公告板的狀態,跳出局部最優。
實現過程如下:
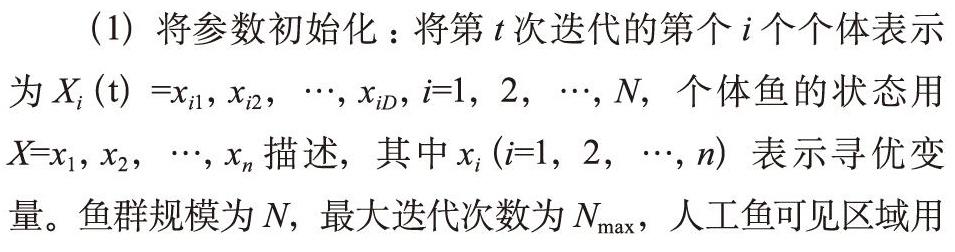
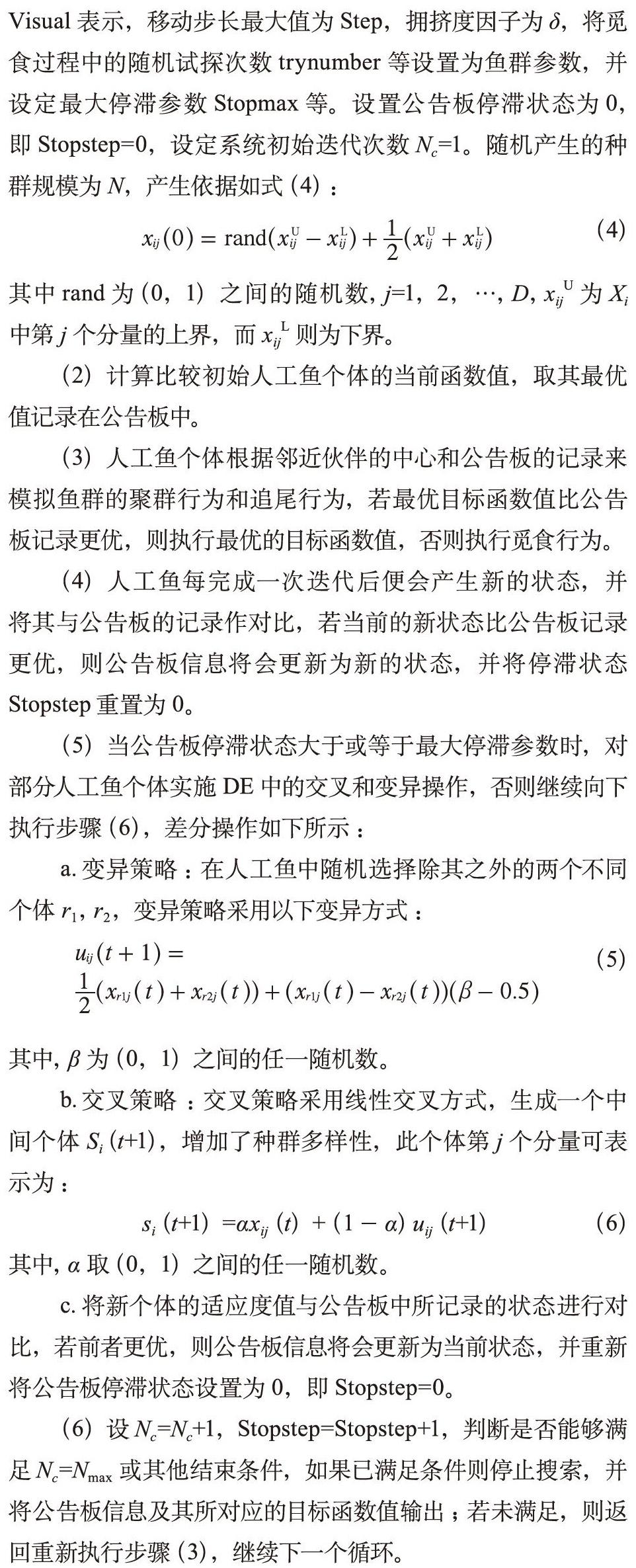
(1)將參數初始化:將第t次迭代的第個i個個體表示為Xi(t)=xi1,xi2,…,xiD,i=1,2,…,N,個體魚的狀態用X=x1,x2,…,xn描述,其中xi(i=1,2,…,n)表示尋優變量。魚群規模為N,最大迭代次數為Nmax,人工魚可見區域用Visual表示,移動步長最大值為Step,擁擠度因子為δ,將覓食過程中的隨機試探次數trynumber等設置為魚群參數,并設定最大停滯參數Stopmax等。設置公告板停滯狀態為0,即Stopstep=0,設定系統初始迭代次數Nc=1。隨機產生的種群規模為N,產生依據如式(4):
其中rand為(0,1)之間的隨機數,j=1,2,…,D,xijU為Xi中第j個分量的上界,而xijL則為下界。
(2)計算比較初始人工魚個體的當前函數值,取其最優值記錄在公告板中。
(3)人工魚個體根據鄰近伙伴的中心和公告板的記錄來模擬魚群的聚群行為和追尾行為,若最優目標函數值比公告板記錄更優,則執行最優的目標函數值,否則執行覓食行為。
(4)人工魚每完成一次迭代后便會產生新的狀態,并將其與公告板的記錄作對比,若當前的新狀態比公告板記錄更優,則公告板信息將會更新為新的狀態,并將停滯狀態Stopstep重置為0。
(5)當公告板停滯狀態大于或等于最大停滯參數時,對部分人工魚個體實施DE中的交叉和變異操作,否則繼續向下執行步驟(6),差分操作如下所示:
a.變異策略:在人工魚中隨機選擇除其之外的兩個不同個體r1,r2,變異策略采用以下變異方式:
其中,β為(0,1)之間的任一隨機數。
b.交叉策略 :交叉策略采用線性交叉方式,生成一個中間個體Si (t+1),增加了種群多樣性,此個體第j個分量可表示為:
si(t+1)=αxij (t)+(1-α)uij(t+1) (6)
其中,α取(0,1)之間的任一隨機數。
c.將新個體的適應度值與公告板中所記錄的狀態進行對比,若前者更優,則公告板信息將會更新為當前狀態,并重新將公告板停滯狀態設置為0,即Stopstep=0。
(6)設Nc=Nc+1,Stopstep=Stopstep+1,判斷是否能夠滿足Nc=Nmax或其他結束條件,如果已滿足條件則停止搜索,并將公告板信息及其所對應的目標函數值輸出;若未滿足,則返回重新執行步驟(3),繼續下一個循環。
3 實例分析
采集振動信號,并對其實施小波包變換,提取小波包熵特征值作為原始種群,運用本文改進的人工魚群算法對風機進行故障診斷。
本文采用圖1所示的五種故障振動信號。對采集到的信號經小波包分析提取出7個不同頻段的信息,每一種故障狀態選40組特征向量,共200組樣本作為原始種群,數據采集器的采集頻率取800 Hz,采樣時間為5 s,數據處理等工作均在臺式機上完成。表1為實驗采用的部分樣本,其中f為基頻,樣本1~5各表示一種風機故障:樣本1代表軸不對中,樣本2代表轉子質量不平衡,樣本3代表機械碰摩,樣本4代表軸承故障,樣本5代表基礎松動。
圖2中橫縱坐標分別代表迭代次數和整體故障診斷正確率。圖2能夠直觀表示出前期故障診斷正確率隨迭代次數的增大而不斷上升的趨勢,后期尤其當迭代次數達到60次之后故障診斷正確率趨于平穩,不再隨著迭代次數的增大而出現大幅波動。將200組樣本數據作為故障檢測數據進行實驗,診斷正確率的檢測結果見表2所列。
從表2可以明確看出對軸不對中診斷的正確率達95%,對轉子質量不平衡診斷的正確率為90%,對機械碰摩診斷的正確率高達100%,對軸承故障診斷的正確率為95%,對基礎松動的診斷正確率為90%。由此可見,采用本文所述方法可大大提高對風機5種故障的診斷正確率。
4 結 語
本文提出了基于人工魚群的風機故障診斷方法,將改進的人工魚群算法應用于風機故障診斷當中,具有實現過程簡單,運算速度快,適應能力強等優點。實驗證明,本文提出的方法故障診斷正確率高,具有很強的可行性,為風機故障診斷這一領域提供了方便。
參考文獻
[1]呂茂超,華鋼,劉晶晶.基于LabVIEW的風機故障監測診斷系統的設計[J].煤礦安全,2011, 42(10):51-53.
[2]李寧,王李管,賈明滔,等.基于信息融合理論的風機故障診斷[J].中南大學學報(自然科學版),2013, 44(7):2861-2866.
[3]呂振江,湯家升.基于遺傳算法的風機故障診斷研究[J].煤炭工程, 2015, 47(1):101-103.
[4]劉剛.一種人工魚群算法及其應用研究[D].上海:華東理工大學, 2015.
[5]丁建明,林建輝,任愈,等.基于諧波小波包能量熵的軸承故障實時診斷[J].機械強度,2011,33(4):483-487.
[6]薛勇,萬振剛.基于改進人工蜂群的軸承故障診斷方法[J].軸承, 2017(5):45-48.
[7]王聯國.人工魚群算法及其應用研究[D].蘭州:蘭州理工大學,2009.
[8]吳昌友.一種改進的人工魚群優化算法[J].智能系統學報, 2015 (3):465-469.
[9]王聯國,洪毅,趙付青,等.一種改進的人工魚群算法[J].計算機工程, 2008,34(19):192-194.
[10]盧青波,張學良,溫淑花,等.高斯變異差分進化算法及其應用研究[J].工程設計學報,2012, 19(5):372-378.
[11]朱宇航.差分進化算法及其在云計算任務調度中的應用研究[D].蘭州:蘭州交通大學, 2013.
[12]劉波,王凌,金以慧.差分進化算法研究進展[J].控制與決策, 2007,22(7):721-729.
[13]張大斌,楊添柔,溫梅,等.基于差分進化的魚群算法及其函數優化應用[J].計算機工程,2013, 39(5):18-22.
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00