核電廠棒電源系統停堆功能的接口設計
2018-01-18 05:37:38陳亞臨
自動化儀表 2018年1期
陳亞臨,楊 鍇
(1.國核自儀系統工程有限公司,上海 200241;2.上海儀器儀表自控系統檢驗測試所,上海 200233;3.國家能源核電站儀表研發(實驗)中心,上海 200233)
0 引言
核電廠棒電源系統(rod drive power system,RDPS)是負責給控制棒驅動機構(control rod drive mechanism,CRDM)提供穩定、可靠電源,保證控制棒處于相應工況對應位置的重要設備,其可靠性直接影響核電廠機組的運行效率[1]。
在第三代核電堆型CAP1400儀控系統中有多種設計方式,可對棒電源系統發送停機指令,切斷其對控制棒驅動機構的供電,以實現停堆功能。
為解決核電廠棒電源系統與其他實現停堆功能的系統之間的接口問題,CAP1400通過系統架構的多層級分配、遠程與就地控制相結合、自動與手動控制相結合等措施,保證RDPS停堆功能的安全、可靠運行。
本文介紹了棒電源系統及儀控系統架構,詳細描述了棒電源系統停堆接口設計的實現原理及技術,旨在為后續核電項目中棒電源系統相關的接口設計及管理提供參考。
1 棒電源系統概述
RDPS主要由兩套電動機發電機組(M-G Set)和兩臺控制柜組成。當核電廠正常工作時,兩套電動機發電機組并聯同步運行[2],并經260 V交流母線給控制棒驅動機構供電。當一套電動機發電機組不能正常工作或并網失敗時,另一套機組可繼續承擔全部負載。每臺控制柜控制一套電動機發電機組,能夠給控制棒驅動機構滿負荷供電,并具備并聯運行時均分總負載(最大150 kW)的能力。
2 CAP1400數字化儀控系統總體結構
以實時數據網為界,整個CAP1400儀表控制系統劃分為上下兩個部分[3]。
①下半部分執行核電廠的保護、控制和監測功能,其分為第0層和第1層兩層。
第0層(level 0)主要是執行部件和設備,包括:核電廠的執行部件(電機和控制柜、開關柜)、敏感元件、一次儀表、反應堆停堆斷路器(reactor trip system,RTS)等。
第1層(level 1),包括保護和安全監測系統(protection and safety monitoring system,PMS)、核電廠控制系統(plant control system,PLS)、多樣化驅動系統(diverse actuation system,DAS)、地震自動停堆系統(earthquake scarm system,ESS)、特殊監測系統(special monitoring system,SMS)等。
②中間部分為非安全級的實時數據網。
③上半部分屬于第二層,包括運行和控制中心系統(operation and control centers system,OCS)、數據顯示和處理系統(data display and processing system,DDS)。
3 棒電源系統可實現停堆功能的接口設計
在核電廠儀控系統中,棒電源系統與多樣化驅動系統、主交流電源電氣控制系統(electrical control system,ECS)、電廠控制系統、地震自動停堆系統、停堆斷路器等均有停堆接口。這些接口信號引發的動作均可斷開電動發電機組對CRDM的供電,以實現安全停堆功能。棒電源系統停堆接口設計原理圖如圖1所示。
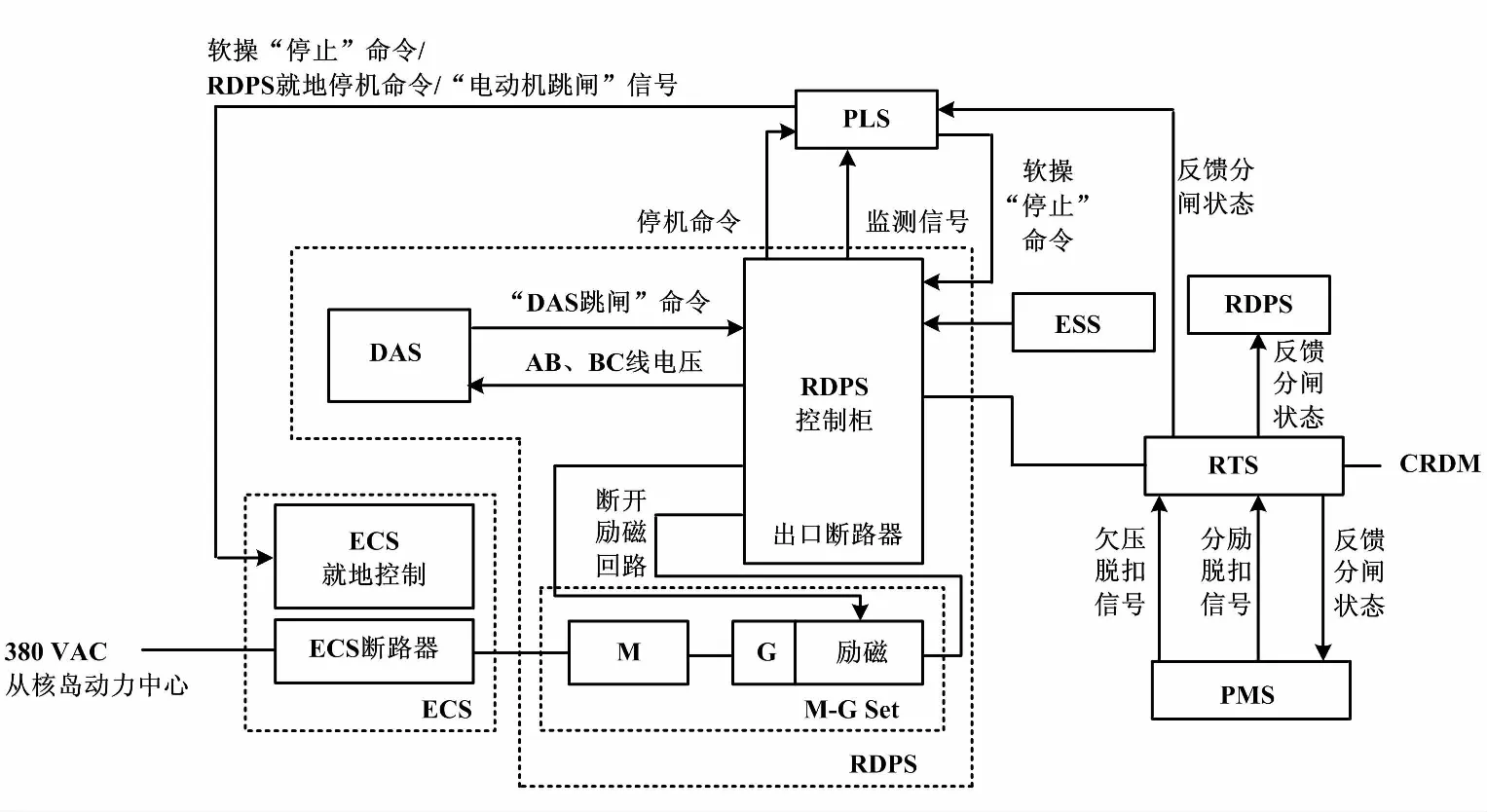
圖1 棒電源系統停堆接口設計原理圖
根據儀控系統層級,設備劃分如下。
①位于第0層的執行設備有主交流電源系統、棒電源系統、停堆斷路器。
②位于第1層的系統有多樣化驅動系統、電廠控制系統、地震自動停堆系統、保護和安全監測系統。
③另外,PLS的軟操指令從位于儀控系統第2層的工程師站(位于DDS)或主控制室(位于OCS)發送。
根據就地/遠程控制方式,設備劃分如下。
①可實現就地控制的有ECS可就地停斷電動機(一般只在維修時使用)、RDPS控制柜可就地停斷電動機和發電機、RTS可就地分閘。
②可實現遠程控制的有DAS可遠程跳閘發電機勵磁回路、PLS軟操可遠程斷開發電機出口斷路器、ESS可遠程斷開出口斷路器、PMS可遠程斷開停堆斷路器。
根據手動/自動控制方式,控制方式劃分如下。
①可實現手動控制的有ECS可手動分閘、DAS可手動分閘發電機勵磁回路、RDPS控制柜可手動斷開電動機和發電機、PLS軟操控制、RTS可手動分閘。
②可實現自動控制的有DAS的自動勵磁跳閘控制、PLS的“RDPS就地停止”控制、ESS地震停堆觸發、PMS對RTS的分勵或欠壓脫扣控制。
3.1 RDPS與DAS的停堆接口
DAS是非1E級的儀控系統,與PMS相隔離。
RDPS與DAS之間的接口為硬接線,傳輸模擬量和開關量。
①DAS可通過48 VDC開關量傳輸“DAS跳閘”信號給棒電源機組,斷開發電機勵磁回路以實現停堆。由DAS向RDPS控制柜提供48 VDC電壓。
②DAS可通過4~20 mA模擬量信號監測機組公共母線上的AB和BC線電壓,以確保反應堆停堆。4~20 mA信號電源由DAS機柜提供。
RDPS-DAS停堆接口設計原理圖如圖2所示。
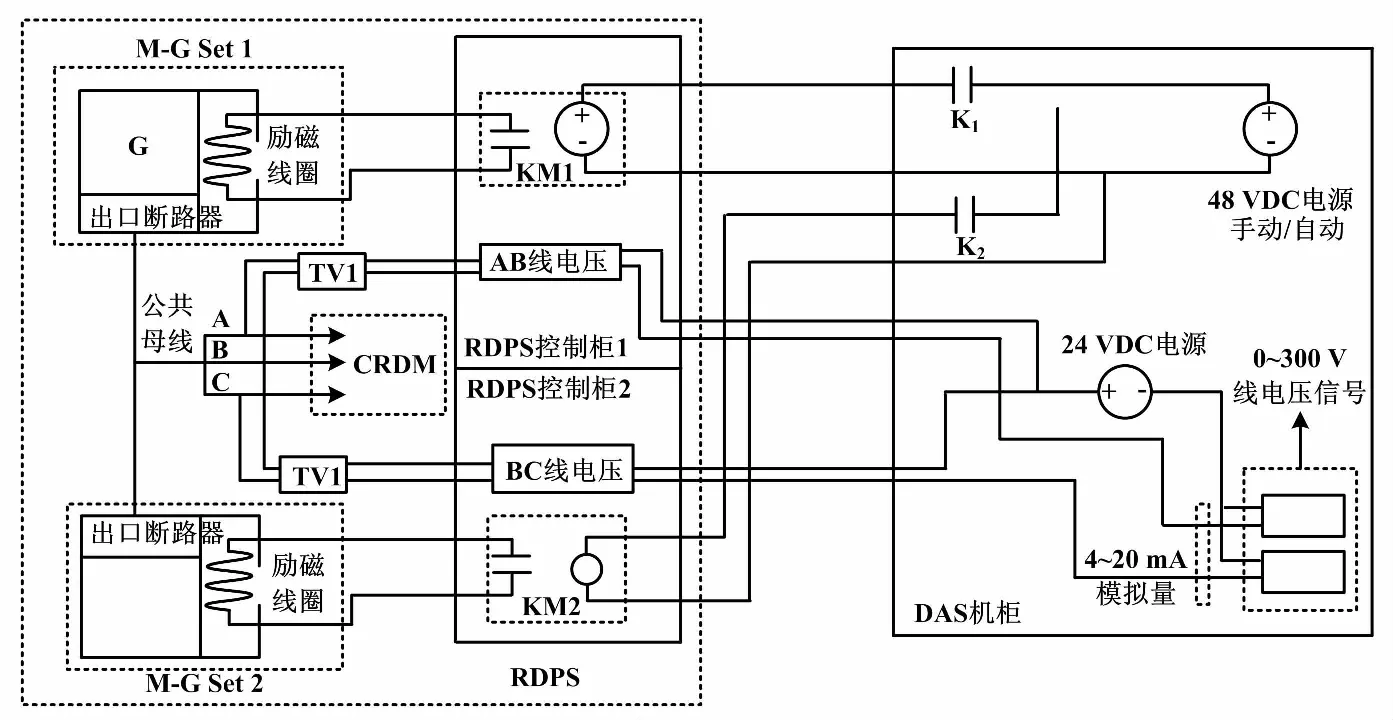
圖2 RDPS-DAS停堆接口設計原理圖
DAS的勵磁脫扣電路包含兩個48 VDC有源觸點:一個用于自動跳閘,另一個用于手動跳閘。
①DAS機柜內的K1、K2為常開有源觸點,當接收“DAS跳閘”信號時,觸點閉合。
②當K1閉合后,勵磁脫扣電路中位于RDPS控制柜內的接觸器KM1右側線圈將得電,并通過機械線圈將左側的常閉觸點斷開,最終實現發電機勵磁回路跳閘。
3.2 RDPS與ECS、PLS的停堆接口
主交流電源系統是一個不執行任何安全功能的非1E級系統,從核島動力中心經ECS斷路器給棒電源機組提供380 V交流電。
核電廠控制系統為非1E級,執行核電站從冷停堆到滿功率的正常運行所必需的功能。通過建立并維持核電站的運行條件在規定的限制之內,減少觸發保護動作工況的出現和減輕操縱員日常工作負擔,從而提高核電廠的安全性。
RDPS與PLS之間的接口應為硬接線,傳輸開關量。
RDPS-PLS/ECS停堆接口設計原理圖如圖3所示。
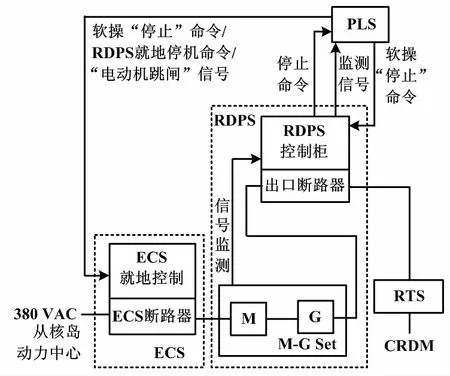
圖3 RDPS-PLS/ECS停堆接口設計原理圖
①ECS可就地切斷對電動機的380 VAC供電,但一般只在維修時使用。
②PLS軟操可對RDPS控制柜發送“停止”命令,斷開發電機出口斷路器,以切斷供電。
③PLS軟操可對ECS發送“停止”命令,斷開ECS出口斷路器,以切斷ECS對電動機的供電。
④PLS可接收RDPS控制柜發送的停機命令,經運行模式和優先邏輯判斷后,發送“停止”命令給ECS。ECS切斷對電動機的供電。此工作方式可完成MCR和就地控制柜控制的同步交換。
⑤RDPS控制柜PLC監測機組的振動和溫度等信息,并通過無源觸點將“電動機跳閘”信號傳輸給PLS。PLS接收到此信號后,應立即使ECS斷路器跳閘。
3.3 RDPS與ESS的停堆接口
地震自動停堆系統獨立于保護和安全監測系統及多樣化驅動系統,通過連續監測地震動并當監測到地震動加速度超過預先設定的整定值時,產生離散停堆信號驅動棒電源機組出口斷路器跳閘,以觸發反應堆停堆系統。
ESS是非1E級儀控系統,不執行安全有關功能。
①ESS A通道邏輯觸發機柜通過無源、常開觸點,發送“ESS A通道地震停堆觸發信號”至RDPS控制柜A。
②ESS B通道邏輯觸發機柜通過無源、常開觸點,發送“ESS B通道地震停堆觸發信號”至RDPS控制柜B。
③僅當A、B兩個通道均有效輸出停堆信號,并將兩臺棒電源機組出口斷路器均斷開時,才能完全切斷對機組對CRDM的供電,最終實現停堆。
RDPS控制柜與ESS之間的接口應為硬接線,傳輸開關量信號。RDPS-ESS停堆接口設計原理圖如圖4所示。
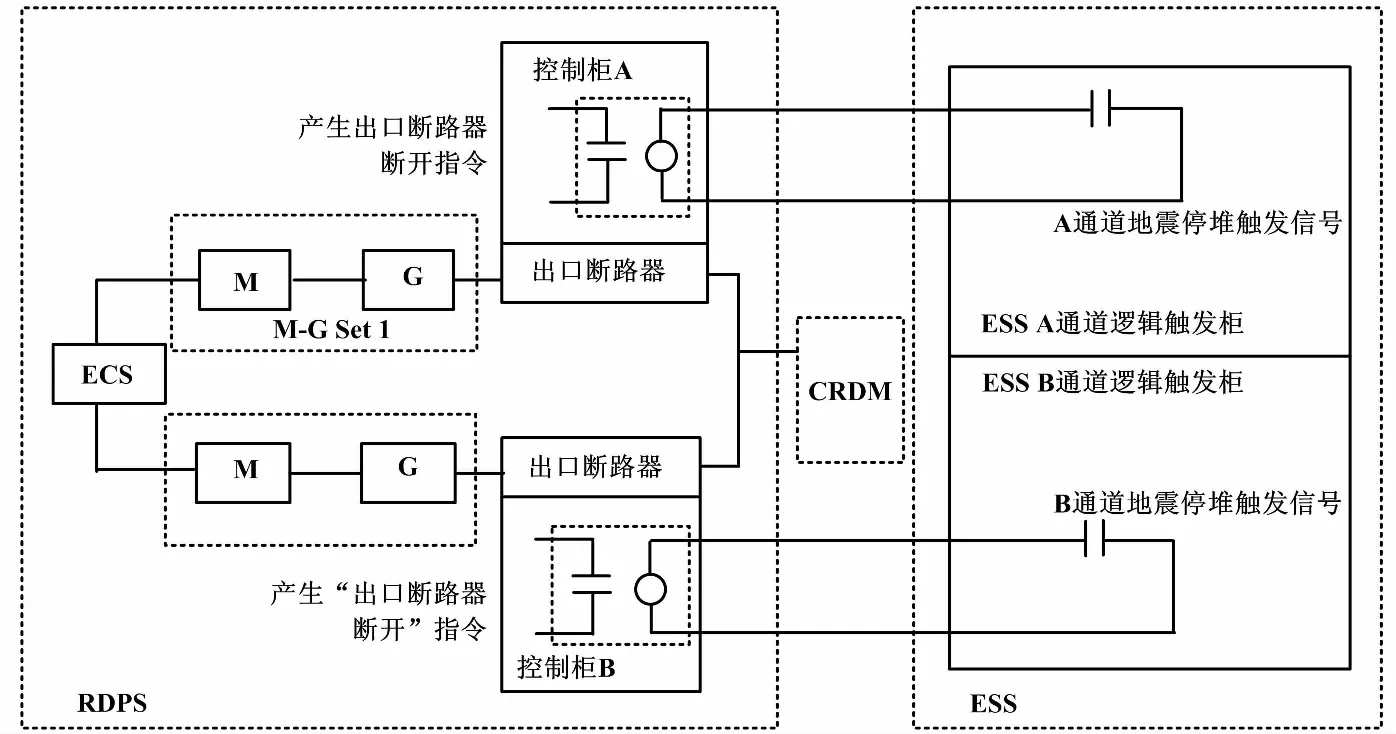
圖4 RDPS-ESS停堆接口設計原理圖
RDPS僅接收來自ESS的停堆觸發信號,并不向ESS發送出口斷路器狀態反饋信號。
①ESS發送的脈沖型觸點信號的脈沖寬度至少應為1 s(可上下浮動5%)。
②當ESS A/B通道邏輯觸發柜的地震停堆觸發信號處于觸發狀態時,應閉合RDPS控制柜的常開觸點。
3.4 RDPS與RTS的停堆接口
反應堆停堆系統接收來自保護和安全監測系統發送的脫扣信號(分勵或欠壓),并觸發動作切斷RDPS對CRDM的供電,以實現反應堆停堆。
①每個停堆斷路器設有額定電壓為48 VDC的欠壓(UV)脫扣裝置和額定電壓為220 VDC的勵磁脫扣(SHTR)裝置。發生自動或手動反應堆緊急停堆時,PMS通過對欠壓脫扣裝置和勵磁脫扣裝置發送信號,使停堆斷路器分閘。
②每個停堆斷路器都會提供分閘狀態給保護與安全監測系統、電廠控制系統以及落棒試驗子系統(rod drop test system,RDTS),以確保反應堆已停堆。
RDPS-RTS停堆接口設計原理圖如圖5所示。
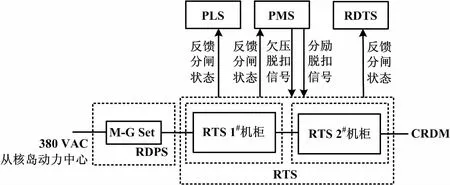
圖5 RDPS-RTS停堆接口設計原理圖
4 多樣性和冗余性
CAP1400棒電源系統在自身結構以及與其他系統接口的設計上,均充分遵循了多樣性和冗余性的原則,提高了核電機組運行的穩定性和安全性。
4.1 多樣性
基于計算機的數字化儀控系統具有可靠性高、應用靈活的特點,但由于數字化的弊端,軟件共因故障的問題也較突出。引入多樣性可較大程度避免或減緩軟件共因故障的影響[4]。
HAF102-2004明確指出:采用多樣性原則能減少某些共因故障的可能性,從而提高某些系統的可靠性[5]。
多樣性是儀控系統設計的一項原則,是指通過探測不同參數,使用不同技術、不同算法、不同驅動手段響應電站工況。
NUREG/CR-6303把多樣性分為6種重要的類型:人員多樣性、設計多樣性、軟件多樣性、功能多樣性、信號多樣性以及設備多樣性。CAP1400儀控系統總體結構遵從NUREG/CR-6303,其在多樣性的設計上和功能上充分考慮并滿足NUREG/CR-6303中第三章“分析導則”的要求[6]。
與棒電源系統停堆功能相關的多樣性表現如下。
(1)設計多樣性。
在CAP1400數字化儀控系統設計中,與RDPS有停堆接口的PLS、DAS、PMS均采用了不同的架構方式或處理芯片,保證了設計的多樣性。
(2)設備多樣性。
①傳感器多樣性。DAS采用獨立于PMS的現場傳感器采集過程參數,因此即使PMS因為傳感器故障失效時,DAS仍可正常執行其功能。
②處理器多樣性。DAS、PMS分別采用不同技術原理、體系架構和開發驗證平臺的芯片。
③執行機構多樣性。DAS、ESS通過切斷發電機出口斷路器,而PMS則通過切斷停堆斷路器,實現停堆。PLS既可通過切斷ECS斷路器,也可通過切斷發電機出口斷路器,實現停堆。其執行手段具有多樣性。
④顯示系統的多樣性。PMS、PLS和DAS均采用了不同的顯示系統,因此不會出現因共模故障導致所有顯示丟失的情況,為電站操作員提供了充足、可靠的電站信息。
(3)功能多樣性。
PMS是一套具有4個獨立序列的1E級系統,采用4取2表決實現緊急停堆驅動;而DAS具有2個序列,采用2取2表決實現緊急停堆驅動。此外,DAS與PMS還采用不同的觸發整定值、不同的延時時間和不同的控制邏輯來實現驅動功能。兩者采集不同傳感器的信號,采用不同的方式驅動專設安全設備來緩解事故后果。
(4)人員多樣性。
DAS的設計、驗證和確認、實施過程由不同的開發人員完成。
(5)信號多樣性。
在緊急停堆中,針對特定事件的信號,在PMS內來自不同類型傳感器,而在DAS內則來自專用傳感器。
(6)軟件多樣性。
PMS、DAS執行的自動及硬手操保護功能不依賴于軟件的運行,且PMS、PLS和DAS均采用了不同的設計工具軟件。
4.2 冗余性
冗余是提高安全重要系統可靠性的重要方法[7]。在核安全級數字化儀控系統的設計中,冗余設計是降低因共模失效(common mode failure,CMF)導致部分CAP1400儀控總體結構無法響應瞬態或核電站故障概率的有效手段之一。冗余設計本身并不能預防CMF,但在各個失效間隔時間足夠大的情況下,使用冗余子系統可以使電站發現并響應包括CMF在內的失效。棒電源系統停堆功能設計中采用的冗余設計介紹如下。
①棒電源系統本身采用了兩套電動機、發電機組并聯同步運行的結構,在系統設計上保證了單個元件的故障不會影響負荷的持續供電。
②在儀控系統的第0層~第2層均有可發送或執行停堆指令的系統,體現了停堆操作主體的冗余性。
③在遵循執行優先級原則的前提下,既可在儀控系統第0層實現對ECS、RDPS控制柜、RTS的就地停堆控制,也可在位于儀控系統第2層的主控室或工程師站實現遠程停堆控制。
④DAS對發電機勵磁線圈的手動分閘及自動跳閘的冗余控制、PLS對機組的軟操停機及經檢測信號自動停機的冗余控制、ECS對電動機入口電壓手動切斷及經PLS指令自動切斷的冗余控制,均體現了棒電源系統停堆操作方式的冗余性。
5 結束語
在第三代核電堆型CAP1400數字化儀控系統中,
棒電源系統與多樣化驅動系統、電廠控制系統、地震自動停堆系統、主交流電源系統、停堆斷路器等接口均能實現不同方式的安全停堆,具有就地控制與遠程控制相配合、手動控制與自動控制相結合的特點。
此外,在棒電源系統整體結構設計上,兩套電動機、發電機組并聯同步運行,體現了核電冗余設計的理念,保證了單個元件的故障不會影響負荷的持續供電。同時,在儀控系統總體結構設計上,與棒電源系統有停堆接口或功能相關的PLS、DAS、ESS、ECS、RTS以及PMS等系統,均充分遵循了多樣性和冗余性的設計原則,提高了CAP1400核電堆型的穩定性和安全性。系統接口的設計和管理往往是核電項目工程建設的難點及運行維護階段中的風險項[8],因此系統設計必須嚴格遵循核電廠基本安全原則、充分貫徹縱深防御理念[9]。
[1] 陶果,李虎,張東生.核電站棒電源機組設計研究[J].電工技術,2016,8(A):33-34.
[2] 尹小龍,趙海江,張前平,等.基于電動機發電機組的核電站棒電源系統設計[J].新能源與風力發電,2015,42(7):67-70.
[3] 張淑慧,任永忠.AP1000核電廠儀控系統介紹[J].自動化儀表,2010,31(10):48-51.
[4] 淮小利,張雷,李朝歷.核電站儀控系統的多樣性評估方法及應用[J].核電子學與探測技術,2016,36(1):38-42.
[5] 國家核安全局.HAF 102 核動力廠設計安全規定[S].北京:中國法制出版社,2004.
[6] NUREG/CR-6303 Method for Performing Diversity and Defense-in-Depth Analyses of Reactor Protection Systems[S].NRC,1994.
[7] 王鼎,王曉偉,徐曉冬.一種核安全級數字化儀控系統現場控制站的冗余設計[J].原子能科學技術,2013,47(1):105-108.
[8] 程東平,孫漢虹.核電工程項目管理[M].北京:中國電力出版社,2006.
[9] 童爭光.AP1000核電項目的設計接口管理研究[J].新能源建設,2014,101(2):78-80.
猜你喜歡
設備管理與維修(2022年21期)2022-12-28 07:34:58
設備管理與維修(2022年21期)2022-12-28 07:33:36
工業設計(2022年8期)2022-09-09 07:43:20
中國特種設備安全(2022年1期)2022-04-26 14:15:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
