3-DOF Delta并聯(lián)手控器逆運動學研究及MATLAB/SimMachenics仿真
2018-01-18 09:03:21
制造業(yè)自動化 2017年9期
關鍵詞:結構
(河南工業(yè)大學 機器人研究所,鄭州 450000)
0 引言
人機交互是遙操作技術的顯著特點之一,手控器作為力覺人機交互重要設備,成為近年來遙操作及力覺臨場感技術中重要的研究課題之一[1]。手控器按結構類型可以分為串聯(lián)式、并聯(lián)式和復合式。由于串聯(lián)式手控器存在較多奇異點,為此研究者提出采用并聯(lián)結構的手控器,這種結構具有較強的承載力以及高運動精度,因此逐漸成為目前研究熱點。并聯(lián)結構出現(xiàn)自二十世紀30年代,在80年代洛桑理工學院Revmond Clavel教授提出了Delta并聯(lián)機器人的概念。由于其優(yōu)異的性能,目前Delta結構已經(jīng)被廣泛應用于各種手控器結構中。并且國內(nèi)外眾多學者對其運動學分析及建模等方面也都進行了積極的探索[2,3]。
典型的三自由度Delta結構手控器由三個對稱的運動支鏈、動平臺和靜平臺組成。支鏈與靜平臺通過電機相連,電機轉(zhuǎn)動帶動支鏈運動從而使動平臺運動,同時通過控制動平臺運動可以通過支鏈將相應運動傳遞給電機。對手控器進行有效控制首先要研究其正/逆運動學特性。并聯(lián)機構手控器逆運動學所研究的問題是操作動平臺運動時求解相應驅(qū)動支鏈的輸入角度。Mustafa等人采用解析法對Delta結構并聯(lián)機器人進行運動學正解研究,分析了三種典型關節(jié)向量下的動平臺位姿[4]。文獻[5]對并聯(lián)手控器進行運動學分析并引入重力補償模型,從而提高了機構操作舒適度。Lipkin和Duffy等人采用基于扭矩的對偶性關系提出對扭矩控制的新方法[6]。雖然此類方法很多,但是由于并聯(lián)Delta結構手控器逆運動學模型復雜,在線計算量大,控制效果不理想,因此在實際中應用較少[7]。
以MATLAB/SimMachenics工具箱作為開發(fā)工具,對Delta并聯(lián)手控器進行建模仿真并分析其逆運動學規(guī)律。根據(jù)寧祎提出的手控器性能評價方法[8],為了避免設計上的盲目性,在設計過程中可以通過使用MATLAB/SimMachenics仿真的方法驗證設計的正確性,為進一步研究提供方便。
1 3-DOF并聯(lián)手控器構型介紹與坐標系建立
由于并聯(lián)型手控器具有結構剛度大,操作靈活并且能夠?qū)Σ僮髡弋a(chǎn)生較大的反饋力,適用于面向特殊復雜情況下的遙操作系統(tǒng)。Delta并聯(lián)型手控器由靜平臺、三組支鏈、動平臺組成。其結構如圖1所示。靜平臺與動平臺之間由三條運動支鏈相連,設支鏈與靜平臺之間三個連接點分別為A1、A2、A3,三個連接點均勻分布在以O為圓心,半徑為r0的A1A2A3外接圓上。對靜平臺建立坐標系,以O為原點建立O-XYZ固定坐標系,其中O-X經(jīng)過A1點,O-Ai與X軸夾角為αi(i=1,2,3),以A1為中心建立坐標系Ai-XYZ,坐標系X軸與O-X同向。θi為轉(zhuǎn)動副Ai的轉(zhuǎn)動角度。動平臺與運動支鏈之間的連接點分別為C1、C2、C3,與靜平臺相同,動平臺上的三條運動支鏈同樣均勻分布在以P為圓心,半徑為rp的三角形C1C2C3外接圓上。建立P-XYZ坐標系,P-X軸過C1點,P-X與P?Ci(i=1,2,3)之間夾角為αi(i=1,2,3)。Bi為連接兩條支鏈的轉(zhuǎn)動副,支鏈AiBi的長度為l,BiCi的長度為m。同時建立動坐標系Oi?XYZ(i=1,2,3),Oi與O重合。在運動平臺以Pi為原點建立動坐標系Pi?XYZ(i=1,2,3),Pi-X過Ci點[9]。
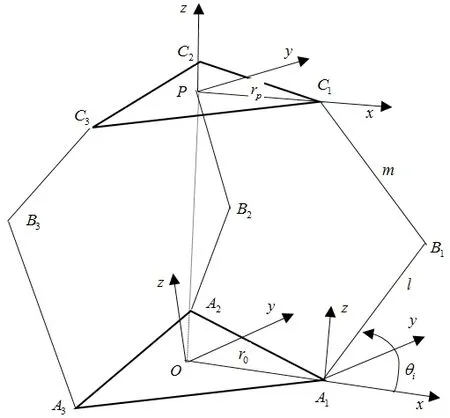
圖1 并聯(lián)手控器運動學分析圖
2 逆運動學模型建立
逆運動學所研究的問題是已知動平臺OP的運動情況,求靜平臺機構的輸入角θ。根據(jù)上文中建立的手控器模型坐標系,對第i個支鏈建立矢量閉環(huán):

上式變換得:

化簡得:

且:

由此可知,只需求出Bi、Ci點在Oi-XYZ坐標系中的點矢量,再根據(jù)式(4)即可求得輸入角θi。設:P點在O-XYZ坐標系中的向量為:
則P點在Oi-XYZ中的點矢量為:

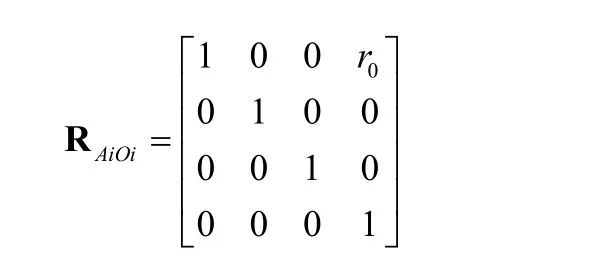
其中ROOi為坐標系O-XYZ到Oi-XYZ的轉(zhuǎn)換矩陣。根據(jù)手控器模型中設定O-Ai到X軸的夾角為αi(i=1,2,3),得:

Ai點在Oi-XYZ中的矢量為:
Bi點在Ai-XYZ中的矢量為:
則,Bi點在O-XYZ中的矢量為:

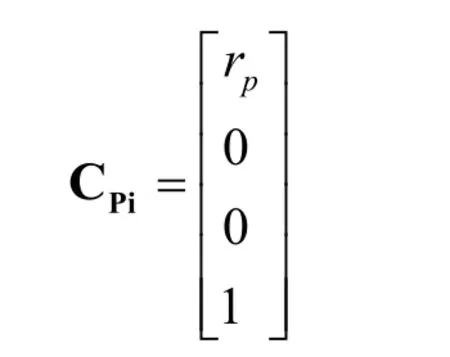
在運動平臺的動坐標系Pi-XYZ中,Cpi為Ci點在Pi-XYZ坐標系上的矢量,且:
CO為Ci點在O-XYZ上的矢量,因此得到:

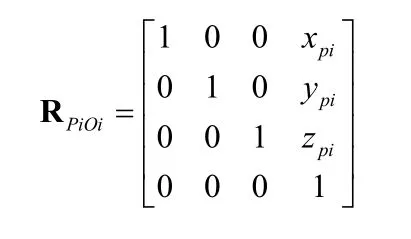
RPiOi為坐標系Pi-XYZ到坐標系Oi-XYZ的轉(zhuǎn)換矩陣,其中:
因此將式(6)、式(7)代入式(3)即可求得BiCi的值,再由式(4)建立的方程得:
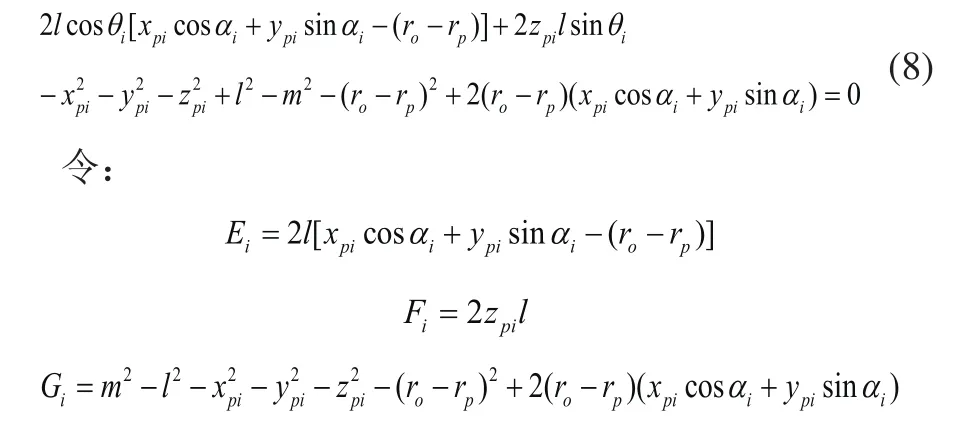
則方程(8)化簡為:
由方程(10)解得:
至此便可得到靜平臺與支鏈連接的運動副的輸入角:
因此,當給定運動平臺的位姿時,通過上式便可求得電機的輸入即驅(qū)動臂的張角。
3 系統(tǒng)仿真
SimMechanics是MATLAB仿真的一個工具箱,其結合Simulink與MATLAB的功能于一體,通過一系列的關聯(lián)模塊組成系統(tǒng)的模型,同時提供可視化仿真工具將機械系統(tǒng)簡化為直觀顯示的機構。本文使用SimMechanics建立并聯(lián)手控器仿真平臺。SimMechanics工具箱為用戶提供了剛體模塊組(Bodies)、運動副模塊組(Joints)、約束和驅(qū)動模塊組(Constraints&Drivers)、傳感器和驅(qū)動器模塊組(Sensors&Actuators)、機械仿真輔助模塊組(Utilities)等機構模塊,能夠?qū)Ω鞣N運動副連接的多剛體機構進行建模與仿真,從而實現(xiàn)對機構系統(tǒng)動態(tài)性能的分析[9]。
使用SimMechanics對系統(tǒng)建模首先需要選擇Ground、Body、Joint模塊。并且建立完整的仿真模型還需要Machine Environment模塊和Ground模塊。通過Machine Environment模塊可以設定系統(tǒng)的機械環(huán)境變量。通過Ground模塊可以將系統(tǒng)固定在慣性系統(tǒng)中,就是仿真系統(tǒng)中的定點,代表在世界坐標系中一個靜止不動的點。需要注意的是在連接中不能將傳感器和驅(qū)動器連接在Ground上。Body模塊表示一個剛體構件,包括質(zhì)量和慣性張量、重心坐標以及一個或多個坐標系統(tǒng)。Joint模塊是運動副模塊組。給定3-DOF手控器結構尺寸參數(shù)如表1所示。

表1 3-DOF手控器結構尺寸參數(shù)
本文根據(jù)并聯(lián)手控器的機械結構在MATLAB/Simulink中建立仿真模型如圖2所示[10]。
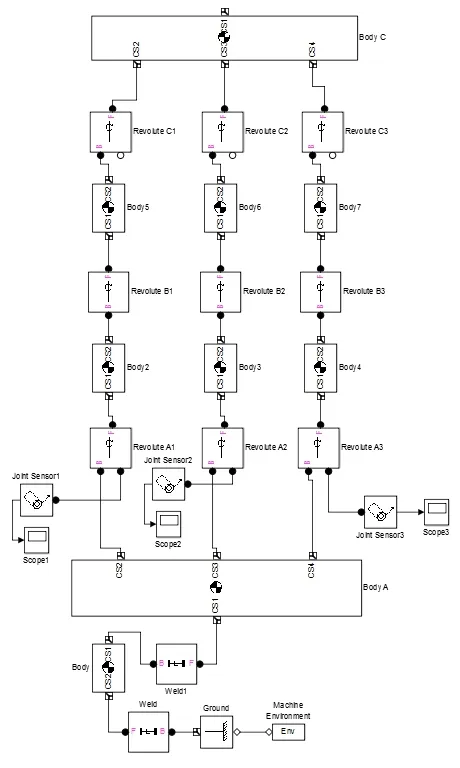
圖2 并聯(lián)手控器的SimMechanics框圖
運行后得到并聯(lián)手控器仿真模型,如圖3所示。
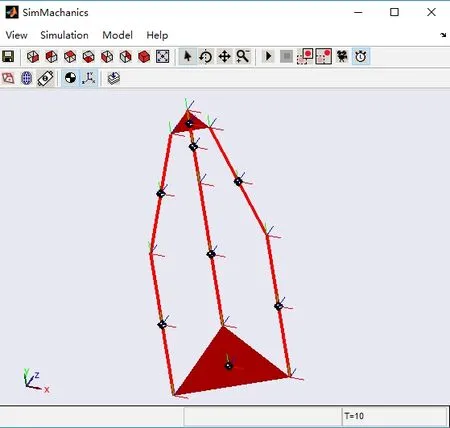
圖3 并聯(lián)手控器仿真模型
SimMechanics還帶有傳感器與執(zhí)行器模塊組(Sensor&Actuators)。該模塊組中的模塊是用來與Simulink模塊進行數(shù)據(jù)交換的。運動學逆解要解決的問題是給定動平臺的位姿、速度、加速度,求解各驅(qū)動關節(jié)的位置、速度、加速度。因此在系統(tǒng)搭建過程中需要在底部三個轉(zhuǎn)動副處連接檢測模塊Joint Sensor。
仿真初始環(huán)境如圖3所示,設此時三個轉(zhuǎn)動副的角度為0。設置仿真時間為10s,動平臺受重力作用向下運動,到達底部后復位,重復此動作兩次。仿真運行后得到三個轉(zhuǎn)動副的轉(zhuǎn)角大小如圖4所示。
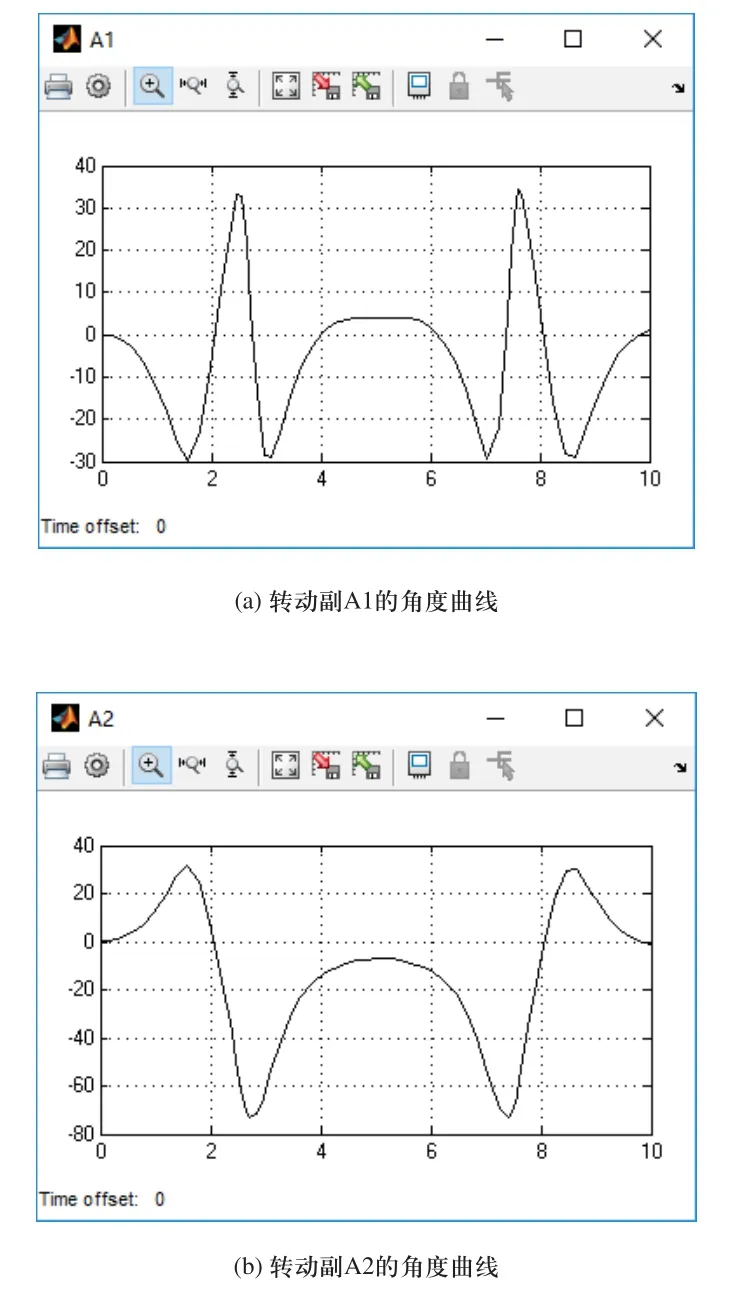
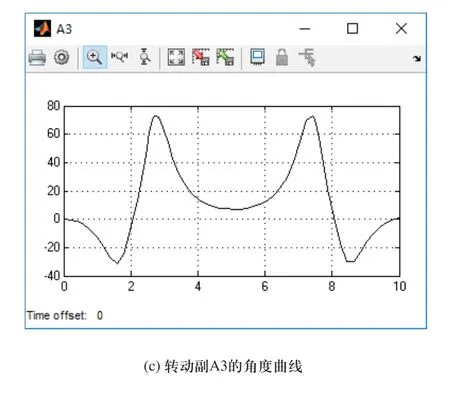
圖4 轉(zhuǎn)動副Ai(i=1,2,3)的角度曲線
從圖中可以明顯看到完整運行一次所用時間為5s,因此分析前5s三個轉(zhuǎn)動副的輸入角變化曲線。從圖中可以看出動平臺在一個周期內(nèi)移動時三個轉(zhuǎn)動副的轉(zhuǎn)動角度的模是相同的,并且只有一個解。結果符合實際要求。
SimMachenics的另一個優(yōu)勢在于在仿真過程中可以觀看機構運行的實時動畫。如圖5所示為某一時刻機構運行動畫截圖。

圖5 SimMachenics運行動畫截圖
4 結束語
并聯(lián)型手控器結構的復雜性及各桿件支鏈的耦合問題,給系統(tǒng)控制帶來了困難。本文對Dleta型手控器進行了逆運動學分析,采用SimMechanics仿真的方法,可快速得出與動平臺位姿對應的各運動支鏈應輸入的角度。在理論上,Dleta型手控器的運動學逆解存在多值性,在實際結構中,各支鏈的輸入角受到幾何約束,其運動學逆解是唯一的。為了驗證運動學逆解,本文采用SimMechanics仿真,對并聯(lián)手控器進行建模和分析,可快速得到運動學逆解,為手控器的機構設計提供了便
【】【】利。SimMechanics工具箱采用可視化模塊將機械系統(tǒng)簡化為直觀顯示的機構模型,使原本看似復雜的機構建模,通過SimMechanics工具箱可容易解決。研究表明,用Matlab/SimMechanics平臺對Dleta型手控器進行仿真分析便捷高效,為并聯(lián)手控器的機構設計和控制研究提供了一種有效的技術手段。
[1]倪濤,朱厚文,張紅彥,黃玲濤,鄭幻飛,鞏明德.基于手控器觸覺共享控制的主從遙操作[J].農(nóng)業(yè)機械學報,2016,(12):367-372+423.
[2]楊斌久,蔡光起,朱春霞.少自由度并聯(lián)機器人的研究現(xiàn)狀[J].機床與液壓,2006(5):201-205.
[3]Mustafa M, MisuariR, Daniyal H. Forward kinematics of 3 degree of freedom delta robot[J].Research and Development,2007(5):1-4.
[4]H. Lipkin, J. Duffy, Hybrid twist and wrench control for a robotic manipulator[J].MachineDesign,2002(6):138-144.
[5]余昆.并聯(lián)手控器運動學分析及重力補償研究[D].華中科技大學,2014.
[6]Brogardh Torgny. Present and Future Robot Control Development-An Industrial Perspective[J].Annual Reviews in Control,2007(31):69-79.
[7]許禮進,劉有余,劉陽.DELTA機器人逆運動學的分析與控制[J].制造業(yè)自動化,2014,(17):66-69.
[8]寧祎. 手控器的性能和評價方法[J].機器人,2000,(04):282-288.
[9]宮赤坤,熊吉光,黃成林.Delta并聯(lián)機器人運動學與動力學仿真分析[J].制造業(yè)自動化,2013,(05):5-7+14.
[10]王英波,黃其濤,鄭書濤,韓俊偉,許宏光.Simulink和SimMechanics環(huán)境下并聯(lián)機器人動力學建模與分析[J].哈爾濱工程大學學報,2012,(01):100-105.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
