雷沃ZP9500高地隙噴霧機的GNSS自動導航作業(yè)系統(tǒng)設計
2018-01-18 09:20:08劉兆朋張智剛羅錫文黃培奎
農業(yè)工程學報 2018年1期
關鍵詞:作業(yè)
劉兆朋,張智剛※,羅錫文,王 輝,黃培奎,張 健,2
(1. 華南農業(yè)大學南方農業(yè)機械與裝備關鍵技術省部共建教育部重點實驗室,廣州 510642;2. 青島農業(yè)大學機電工程學院,青島 266109)
0 引 言
農機裝備的自主導航作業(yè)已成為國內外農機發(fā)展的必然趨勢,基于RTK-GNSS技術開發(fā)的農機自主導航和智能化作業(yè)系統(tǒng)已越來越廣泛[1-2]。高地隙噴霧機在中國規(guī)模化農田的藥肥噴施機械中占據重要地位。但因人工駕駛存在的漏噴、重噴難以保障作業(yè)質量,且飄散的有毒藥物易對駕駛員造成傷害[3-4]。
高地隙噴霧機的自動導航作業(yè)系統(tǒng)可分為自動導航控制和自主作業(yè)控制2部分。在自動導航控制研究方面,一些學者基于簡化二輪車輛模型研究了路徑跟蹤控制的模糊控制算法、遺傳控制算法、狀態(tài)反饋控制算法及基于純追蹤模型的控制算法等,開發(fā)了導航控制系統(tǒng)并通過試驗驗證,路面試驗直線路徑跟蹤精度小于 5 cm,田間試驗路徑跟蹤精度在5~10 cm[5-12]。為提高導航控制精度,許多學者基于二自由度車輛動力學模型、參數(shù)辨識和現(xiàn)代控制理論開展了導航控制器的研究。O’Connor等[13-14]通過離線辨識確定了參數(shù),設計了最優(yōu)導航控制系統(tǒng),在1.8 m/s速度下開展了田間試驗,直線路徑跟蹤最大誤差為10 cm,曲線路徑跟蹤誤差為60 cm;Erkan等[15]基于非線性最小二乘法實現(xiàn)車輛模型參數(shù)的辨識,設計了模糊控制路徑跟蹤控制器,開發(fā)了基于 GNSS的導航控制系統(tǒng),跟蹤誤差較大。Han等[16]通過迭代法實現(xiàn)了車輛模型參數(shù)估計,設計了基于純追蹤模型的路徑跟蹤控制器在水田環(huán)境2 km/h速度下進行了試驗,各行平均誤差在5.8~12.5 cm之間。孟慶寬等[17]通過改進粒子群優(yōu)化算法實現(xiàn)了車輛模型參數(shù)的在線辨識,設計了自適應模糊控制器實現(xiàn)路徑跟蹤,在瀝青路面0.8 m/s的速度下,直線路徑跟蹤偏差4.2 cm、曲線路徑跟蹤偏差5.9 cm。張萬枝[18]等研究了二輪車線性時變模型,基于預測控制理論設計了控制算法,以小型試驗車為平臺在平整草坪上進行了試驗,速度為3 m/s時誤差在10 cm左右。
農業(yè)機械的自動導航作業(yè)系統(tǒng)是在導航控制系統(tǒng)基礎上,通過搭載自主作業(yè)控制器實現(xiàn)極少人干預情況下的田間作業(yè)。Seong等[19]基于 GPS/超聲波傳感器開發(fā)了噴霧機自主導航作業(yè)系統(tǒng),基于超聲波檢測實現(xiàn)了避障識別并設計了規(guī)避路徑,基于模糊控制和遺傳算法設計了路徑跟蹤控制器,田間試驗表明系統(tǒng)在系統(tǒng)實現(xiàn)了自動避障功能,路徑跟蹤精度不高。羅錫文等[8]在自主開發(fā)的 GPS自動導航拖拉機平臺上,通過對拖拉機進行機-電-液改造,設計了拖拉機自動導航作業(yè)系統(tǒng),使拖拉機的啟停、速度控制、機具升降、點火及熄火都實現(xiàn)了自動控制。Nagasaka等[20-21]在插秧機自動導航系統(tǒng)的平臺上,通過對插秧機機構改造,設計了智能作業(yè)控制器,使插秧機能夠自動實現(xiàn)車輛啟停、地頭轉彎、速度控制和插秧機構的升降和插秧作業(yè)等。Hiroki等[22]在履帶式水稻收獲機上,通過搭載視覺系統(tǒng)和 GNSS導航定位系統(tǒng)開發(fā)了一套可自動完成水稻收獲、倉滿卸糧、未收獲邊界的判別和接茬收獲等作業(yè)的水稻收獲機自主導航作業(yè)系統(tǒng),在 0.6、0.8、1 m/s速度下進行田間試驗,直線路徑跟蹤精度<8 cm,自動化程度和導航控制精度高。
以高地隙噴霧機為平臺開展自動導航和自主作業(yè)系統(tǒng)的研究較少。為實現(xiàn)噴霧機在極少人工干預情況下的田間導航作業(yè),避免人工操作噴霧機作業(yè)所造成的藥物損害,本研究以雷沃ZP9500高地隙噴桿噴霧機為平臺,開展了噴霧機自動導航作業(yè)系統(tǒng)的研究。最終在水泥路面、旱田及水田環(huán)境中進行了試驗,驗證了高地隙噴霧機自動導航作業(yè)系統(tǒng)的精確性和可靠性。
1 自動導航作業(yè)系統(tǒng)結構
自動導航作業(yè)系統(tǒng)由雷沃 ZP9500高地隙噴霧機主體、機-電-液裝備及機構、導航控制器和無線監(jiān)控顯示屏終端組成,如圖1所示。

圖1 噴霧機自動導航作業(yè)系統(tǒng)Fig.1 Automatic navigation operation system of sprayer
其中,雷沃ZP9500高地隙噴霧機轉向形式為四輪逆向轉向,車輪大小一致,輪胎為實心胎。離合、噴霧及噴桿升降為電控,油門為踏板機械式調節(jié);噴桿由左、中、右3段組成,各段噴霧可獨立控制,性能參數(shù)如表1所示。需要說明的是,本平臺為該系列產品的首批產品,初定型號為3WP500,設定的作業(yè)速度如表1所示的0~5.4 km/h,其升級產品型號為ZP9500,速度為0~10 km/h。
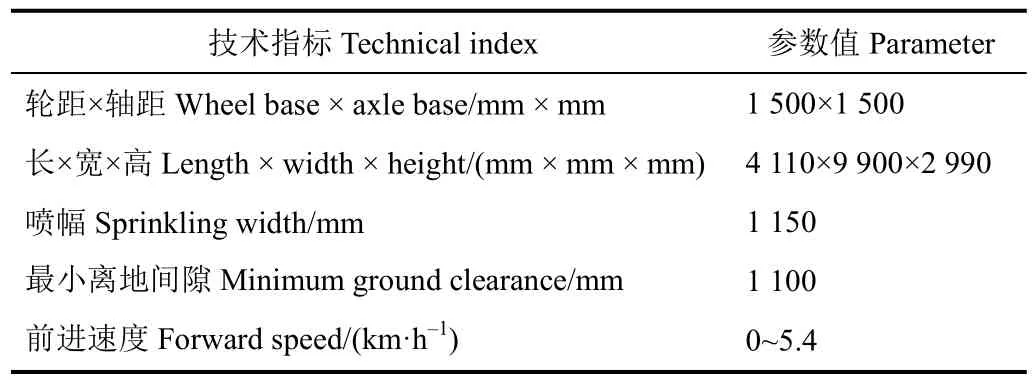
表1 雷沃ZP9500噴霧機主要技術指標參數(shù)Table 1 Main technical index of Lovol ZP9500 sprayer
針對噴霧機結構進行了機-電-液改造,并配置了相應傳感器。轉向系統(tǒng)執(zhí)行主件采用 EATON-KDG4V型電-液比例換向閥,通過加裝液壓管路與噴霧機轉向油路并聯(lián),構成電-液轉向控制機構。轉向輪偏角檢測傳感器采用BEI公司的9902120CWHT型霍爾角度傳感器,與轉向節(jié)臂同軸轉動。油門控制機構選用力姆泰克LIM3-S2-100型電控推桿電機,通過將伸縮軸軸端與油門踏板機構末端相連接,構成油門調控機構。為實現(xiàn)導航作業(yè)控制器對噴霧機的離合、噴霧系統(tǒng)啟停及分段控制,對噴霧機電氣系統(tǒng)進行了部分改造。
其中,位姿傳感器組件選用XSENS公司的 MTi-30慣性傳感器和Trimble公司的雙天線RTK-GNSS導航定位板卡 BD982,可同時實現(xiàn)對位置信息、航向信息的直接測量,其中定位精度1 cm,航向測量精度0.3°,數(shù)據遲延<20 ms。MTi-30提供車身的姿態(tài)、加速度及角速度等信息,姿態(tài)測量精度為0.3°。
導航控制器是導航控制系統(tǒng)的核心,包括導航信息采集與處理模塊、自動導航控制器和控制執(zhí)行機構。其結構及功能如圖2所示。
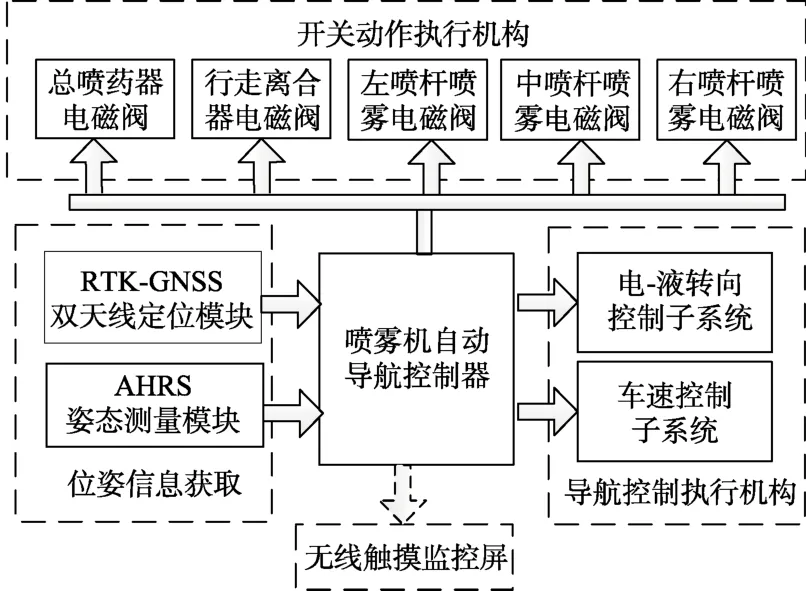
圖2 導航控制器功能結構圖Fig.2 Function structure chart of navigation controller
2 導航作業(yè)控制方法
2.1 作業(yè)路徑跟蹤控制
為引導噴霧機自動完成田間行走,設計了直線路徑跟蹤控制器和地頭轉彎控制器,兩者之間通過設定的邊界閾值實現(xiàn)切換。
2.1.1 直線路徑跟蹤控制
基于車輛操縱特點和車輛運動過程,車輛運動學和轉向控制是導航控制系統(tǒng)研究的重要內容。高地隙噴霧機因重心高、輪胎窄,在田間作業(yè)過程中,尤其是水田環(huán)境下,由地形起伏造成的車體側偏極易導致車身產生側滑并影響導航控制精度,表現(xiàn)為偏航角和位置偏差的擾動。在系統(tǒng)中,因搭載的雙衛(wèi)星天線導航定位系統(tǒng)可實現(xiàn)對偏航角、位置偏差的高精度直接觀測,則在本研究中不將車體的側偏角作為運動狀態(tài)參量。同時,噴霧機轉向形式為四輪逆向轉向且輪胎規(guī)格一致,小角度轉向行駛過程中可假設各輪胎動力學基本對稱,車輪轉角近似相等,則車軸上的2個車輪可用1個車輪代替[23-26]。基于以上特點,在本研究中將四輪逆向轉向車輛模型簡化為了二輪車模型,如圖3所示。
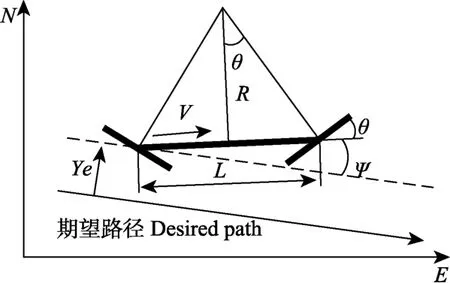
圖3 四輪轉向噴霧機簡化運動學模型Fig.3 Four-wheel steering sprayer simple kinematics model
在車體中心建立車體坐標系,并在導航坐標系下得到噴霧機運動學微分方程描述[23-24],如式(1)~(2)。
式中t為時間,s。
因直線路徑跟蹤中車輪轉角θ為小角度值,故可對方程線性化,得到四輪轉向噴霧機運動狀態(tài)微分方程的標準形式

設計基于全狀態(tài)反饋的直線路徑跟蹤控制率

式中k1為偏航角反饋系數(shù),k2為位置偏差反饋系數(shù)。
經試驗驗證,閉環(huán)系統(tǒng)極點設為-0.5時路徑跟蹤性能穩(wěn)定性好;通過解析系統(tǒng)的特征多項式得到直線路徑跟蹤的狀態(tài)反饋控制器為

在實際應用時,對公式(5)參數(shù)單位進行了重定義,并將式(5)改寫為式(6):用“度”代替“弧度”;車輛位置、航向左偏量值為負;輪角右偏量值為負。

式中δ為決策輪角。
因本平臺無法直接測量車輛的中心點位置,且車身晃動會造成測量“桿臂效應”[13],基于噴霧機運動學模型,在位置信息獲取時將主天線位置投影到車輛中心的地面投影點。
在電-液轉向機構中,車輪角度跟隨控制具有明顯的滯后特性[25-26]。為此針對噴霧機平臺,基于噴霧機電-液轉向系統(tǒng)特性參數(shù),設計了F-PID車輪角度控制算法,在噴霧機運動狀態(tài)下通過追蹤正弦波信號驗證了算法性能。如圖4所示,車輪角度跟蹤信號幅值1.5°,周期1.5 s,跟隨角度曲線相對指令角度曲線呈現(xiàn)穩(wěn)定的相位滯后,拐點位置無震蕩,超調量小。統(tǒng)計跟隨延時τ平均值為0.2 s,從而確定了在該控制系統(tǒng)下的車輪角度控制延時特性。
在導航控制系統(tǒng)中,車輪角度控制的延時造成了車輛狀態(tài)的校正滯后,導致系統(tǒng)穩(wěn)定性降低,表現(xiàn)為導航航向偏差、位置偏差的增大。在直線路徑跟蹤下,噴霧機四輪逆向轉向機構使前后車輪的運動軌跡具有良好的同轍性,在運動軌跡上可近似為前輪相對后輪存在量值為τ=L/V的相位超前。基于此,本研究將天線投影位置前置,距離為d=Vτ,以補償車輪角控制的滯后,坐標轉換公式如式(7)。該方法在實踐應用中取得了成效,提高了控制精度和穩(wěn)定性。
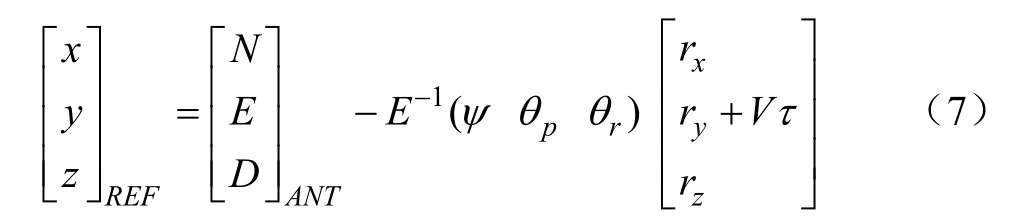
式中N-E-D為主天線坐標,x-y-z為車輛坐標,θp為車輛俯仰角,rad;θr為橫滾角,rad;rx-ry-rz為主天線在車體坐標系下的坐標。
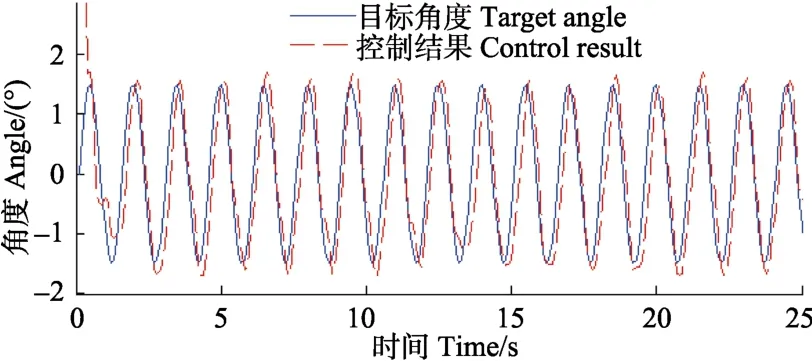
圖4 車輪角度跟蹤控制Fig.4 Wheel angle tracking control
2.1.2 地頭轉向控制
基于純追蹤模型設計了地頭轉彎控制算法[27],如圖5所示:1)設定前視距離為Dh,當前定位坐標為Pc(xc,yc),車輛當前航向角為φC,曲線路徑離散點距離Pc最近的點為Pn;2)自Pn沿曲線路徑方向依次搜索點Pn+k(xn+k,yn+k),直至PcPn+k;3)噴霧機的目標航向角φaim,如式(8)
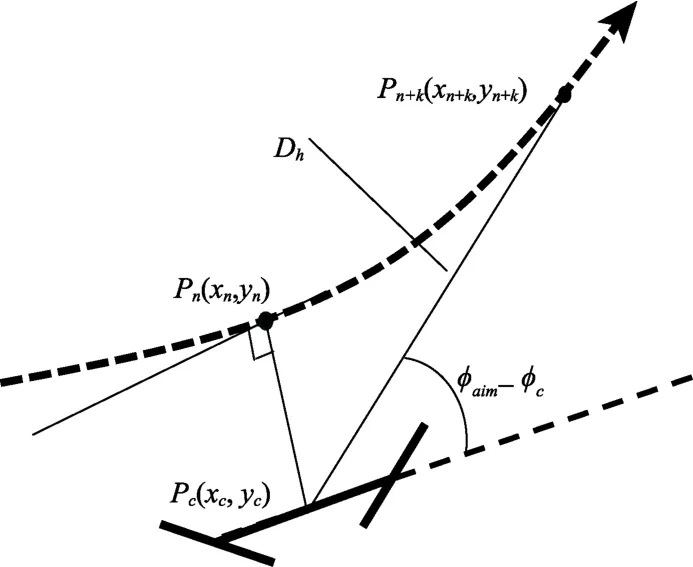
圖5 地頭轉彎路徑跟蹤控制示意圖Fig.5 Path tracking control sketch for headland turn

設計控制律得到曲線路徑跟蹤的決策車輪角

式中k3為決策輪角系數(shù)。
2.2 一體化噴霧作業(yè)控制方法
噴霧機一體化作業(yè)控制由車輪角度控制部分、油門開度控制部分和噴霧作業(yè)控制查詢列表組成。其中,基于F-PID設計了車輪角度控制算法和油門開度控制算法;依照人工駕駛操作經驗并結合本系統(tǒng)電氣結構特點,設計了噴霧機自動作業(yè)查詢列表,如表2所示。
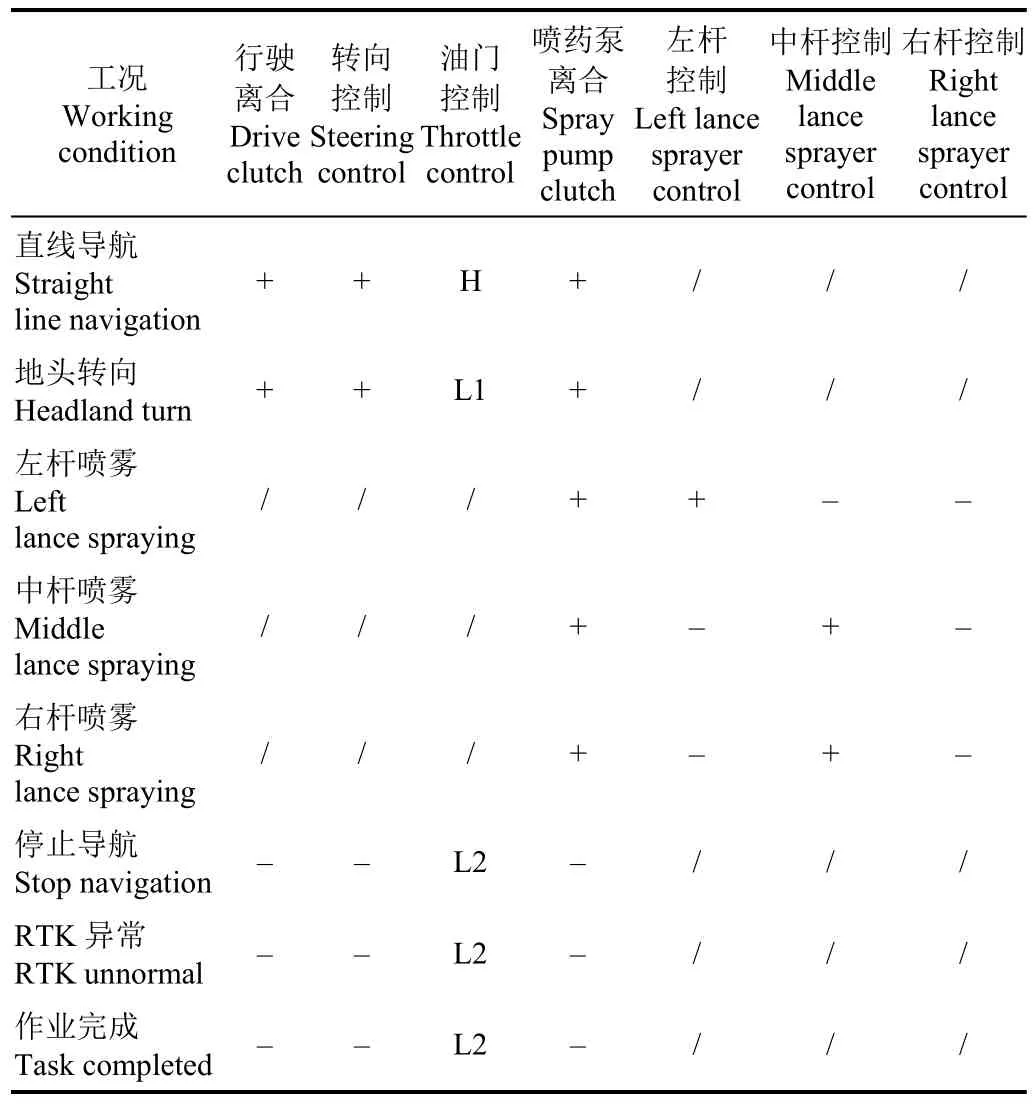
表2 一體化自主作業(yè)控制策略Table 2 Integrated autonomous operation control strategy
3 測試試驗
3.1 試驗過程
2016年6月在江蘇省黃海農場,分別在水泥地面、旱田和水田3種不同環(huán)境場地,速度為0.8,1.3和1.5 m/s時,進行了 3次以上的重復試驗,受限于本平臺的作業(yè)速度,更高速度下的試驗未開展。
試驗過程為:1)導航控制系統(tǒng)引導噴霧機自動完成直線行走和地頭轉彎對行、速度高低切換,噴桿噴霧控制等作業(yè),在RTK差分數(shù)據異常和作業(yè)完成時控制車輛停車、停噴,油門至怠速位置;2)導航作業(yè)完成后導出導航過程參數(shù),包括位姿信息、跟蹤偏差、轉向車輪角及油門控制信息、其他狀態(tài)標志位等。控制參數(shù)為:1)為更好的測試地頭轉彎平順性,根據不同測試環(huán)境設定了不同的作業(yè)幅寬范圍,水泥路面、水田試驗設置最大幅寬為12 m,最小幅寬為6 m;旱田試驗最大、最小幅寬同為6 m;地頭轉彎半徑為3 m;2)曲線路徑追蹤控制參數(shù)k3=1,前視距離Dh=2 m,轉彎對行的引導過渡線Lt=4 m;3)作業(yè)完成地頭停車的邊界距離S≤2 m。
相同地況條件,不同速度下的直線路徑跟蹤控制精度一致性較好,但車身在1.3、1.5 m/s速度下轉彎會發(fā)生明顯的側滑,影響對行的平穩(wěn)性;地面顛簸對導航控制精度影響明顯,且噴霧機在大幅顛簸作業(yè)時噴桿會產生劇烈晃動,在噴桿高度較低時噴桿末端易產生觸地危險。
為防止噴霧機在作業(yè)時因大幅顛簸造成噴桿觸地導致噴頭堵塞及損傷,和較高速度下的轉彎側滑導致接行平順性差及作物損傷,并根據黃海農場噴霧作業(yè)的速度標準,最終在1.3 m/s速度下進行了3地況環(huán)境下的直線路徑跟蹤試驗,在0.8 m/s速度下完成地頭轉彎。導航路徑軌跡如圖 6所示,其中水泥路面試驗場地長 75、寬40 m,規(guī)劃4行;旱田長60 m、寬32 m,規(guī)劃5行;水田長95 m、寬38 m,規(guī)劃4行。
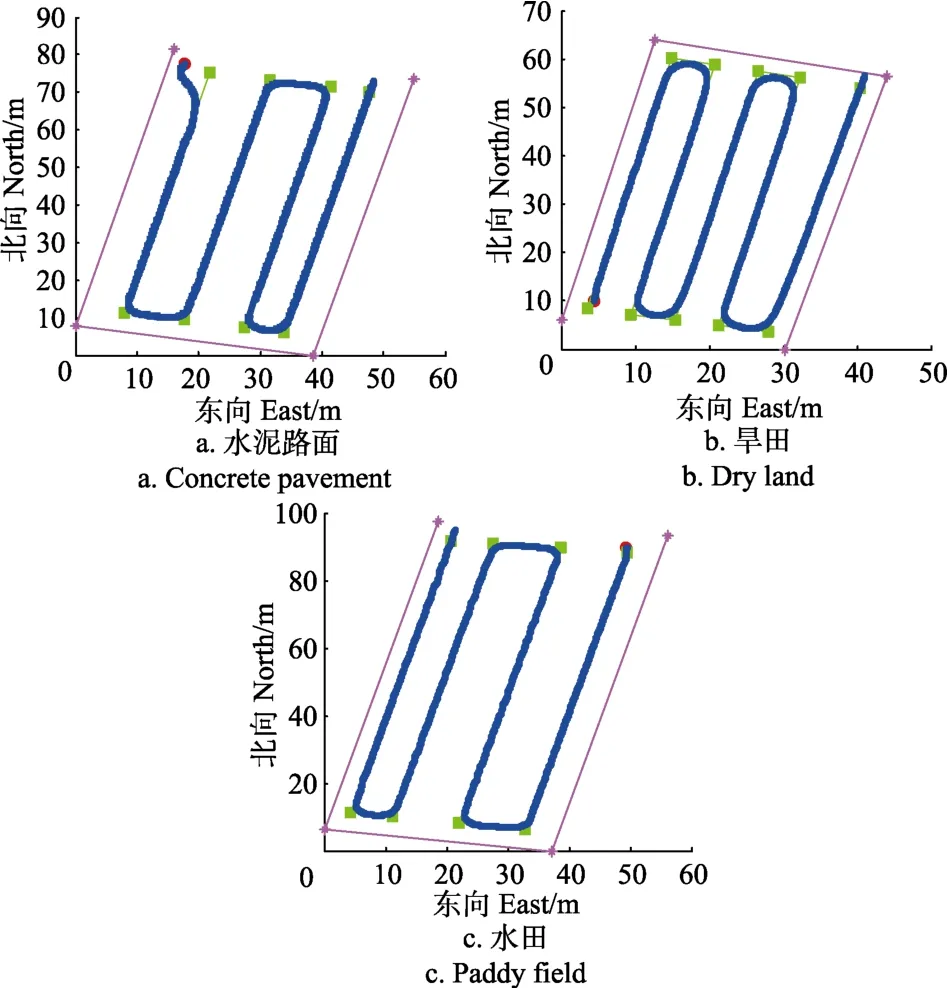
圖6 不同地塊的導航作業(yè)軌跡Fig.6 Navigation operation trajectories in different fields
3.2 試驗數(shù)據分析
對橫向位置偏差的極值、均值和標準差進行了統(tǒng)計分析,其中偏差的極值和均值反映了導航控制精度,標準差反映了導航控制的穩(wěn)定性;同時,為考察地形環(huán)境對導航系統(tǒng)精度和穩(wěn)定性的影響,本文對導航過程中的車身橫滾角的極值、均值和標準差進行了統(tǒng)計分析[28-29],如表3所示。
3.2.1 導航控制精度
在水泥路面上,各行的導航控制偏差均值依次為–1.0、0.4、0.2、–0.2 cm,總體平均值為–0.15 cm,其中第 1行因導航初始位置偏離路徑過大導致上線過程出現(xiàn)小幅超調,造成偏差明顯大于其他行;旱田環(huán)境下,各行的偏差均值依次為1、1.6、0.9、1.4、1.9 cm,行間偏差均值穩(wěn)定,總體平均值為 1.3 cm;水田環(huán)境下,各行的導航控制偏差的均值依次為2.3、2.9、2.3、1.4 cm,行間偏差均值穩(wěn)定,總體平均值為 2.2 cm。數(shù)據表明,同一地塊環(huán)境下的各行導航控制偏差相近,體現(xiàn)了導航系統(tǒng)較好的控制精度;但在不同地況下表現(xiàn)出了明顯的差異性。
3.2.2 導航控制穩(wěn)定性
水泥路面上,各行的橫向位置偏差標準差依次為1.4、1、0.9、0.8 cm,標準差平均值為1 cm;旱田環(huán)境下,各行位置偏差的標準差依次為4.6、3.4、3.1、2.1、3.5 cm,標準差平均值為 3.3 cm;水田環(huán)境中,各行位置偏差的標準差依次為3、4.8、4.7、5.2 cm,標準差平均值為4.4 cm。數(shù)據表明,同一地塊環(huán)境下各行的導航控制偏差的標準差相近,體現(xiàn)了導航系統(tǒng)較好的穩(wěn)定性;但不同地況表現(xiàn)出了明顯的差異性。
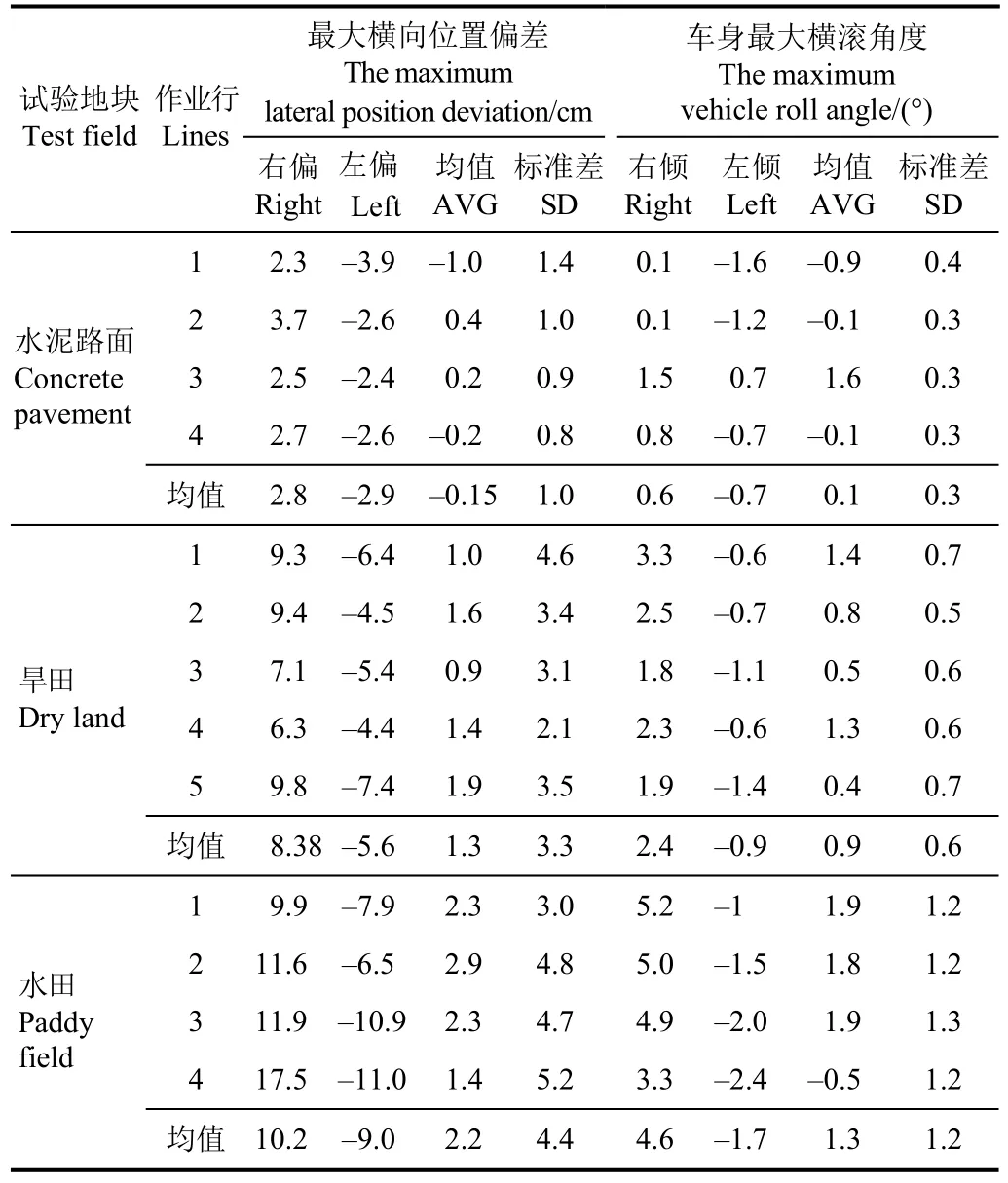
表3 不同地塊各行橫向位置偏差和橫滾角度數(shù)據統(tǒng)計Table 3 Statistical of lateral position deviation and roll angle of each row in different fields
3.2.3 地況對精度和穩(wěn)定性的影響
采用 EXCEL軟件對各行的位置偏差極值和車身橫滾角極值做線性擬合,如圖 7所示:兩者呈現(xiàn)了顯著的正比例線性關系,決定系數(shù)R2=0.914。
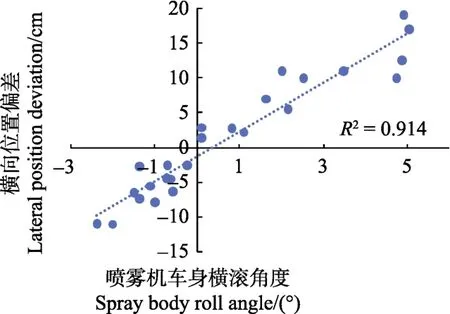
圖7 噴霧機車身橫滾角度與橫向位置偏差Fig.7 Sprayer body roll angle and lateral position deviation
同時,采用EXCEL軟件對各行位置偏差標準差和車身橫滾角標準差進行指數(shù)曲線擬合,如圖 8所示。兩者呈現(xiàn)了顯著的正比例指數(shù)關系,決定系數(shù)R2=0.947。
數(shù)據表明,導航控制的精度和穩(wěn)定性隨地況條件的下降而下降,地況顛簸引起的車體偏斜使車輛側向力和行駛偏移量增大,造成了側滑和車身方向的偏斜,進而對導航控制的精度和穩(wěn)定性造成了影響,這與相關學者的對車輛顛簸橫滾與車體側向力、行駛側偏明顯相關的研究結論相符合[30-31]。
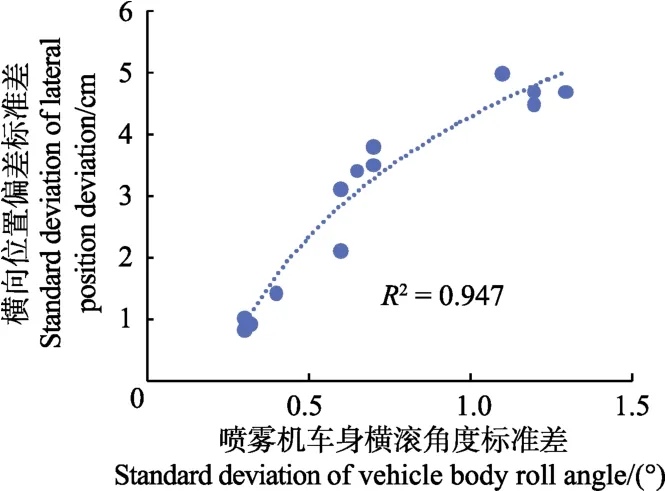
圖8 車輛橫向位置偏差標準差和車身橫滾角度標準差關系曲線Fig.8 Relation curve for standard deviation of lateral position deviation and standard deviation of vehicle body roll angle
4 結 論
1)基于RTK-GNSS雙天線導航定位傳感器設計了噴霧機自動導航控制系統(tǒng),試驗表明該系統(tǒng)能夠自動完成導航路徑規(guī)劃,設計的路徑跟蹤控制器能夠引導噴霧機自動完成直線行駛和地頭轉彎,設計的一體化自動作業(yè)控制器能夠控制噴霧機自動完成噴霧控制、油門控制和行駛離合控制。高地隙噴霧機導航作業(yè)系統(tǒng)能夠在極少人干預情況下自動完成田間噴霧作業(yè)。
2)通過水泥路面、旱地和水田3種環(huán)境試驗測試,導航控制直線路徑跟蹤橫向位置偏差絕對值的最大值依次為 3.9、9.8、17.5 cm,平均值的絕對值依次為 0.15、1.3、2.2 cm,標準差依次為1.0、3.3、4.4 cm;同一地塊的各行位置偏差均值和標準差相近。數(shù)據表明,導航系統(tǒng)具有良好的穩(wěn)定性和控制精度,能夠滿足水田、旱田環(huán)境下的噴霧作業(yè)要求。
3)導航控制的精度和穩(wěn)定性隨地況條件的下降而下降。導航測試中各行的車身橫滾角最大值與橫向位置偏差最大值之間呈顯著的線性關系,決定系數(shù)為0.914;各行車身橫滾角的標準差與橫向位置偏差的標準差之間呈顯著的指數(shù)關系,決定系數(shù)為0.947。
[1] 姬長英,周俊. 農業(yè)機械導航技術發(fā)展分析[J]. 農業(yè)機械學報,2014,45(9):44-54.Ji Changying, Zhou Jun. Current situation of navigation technologies for agricultural machinery[J]. Transactions ofthe Chinese Society for Agricultural Machinery, 2014, 45(9): 44-54. (in Chinese with English abstract)
[2] 胡靜濤,高雷,白曉平,等. 農業(yè)機械自動導航技術研究進展[J]. 農業(yè)工程學報,2015,31(10):1-10.Hu Jingtao, Gao Lei, Bai Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 1-10. (in Chinese with English abstract).
[3] 周良富,沈啟楊,秦維彩,等. 自走式高地隙噴桿噴霧機防治效果試驗分析[J]. 江蘇農機化,2006(3):22-25.Zhou Liangfu, Shen Qiyang Qin Weicai, et al. Research on the control efficiency of an autonomous self-propelled high clearance boom sprayer[J]. Jiangsu Agricultural Mechanization, 2006(3): 22-25. (in Chinese with English abstract)
[4] 林立恒,侯加林,吳彥強,等. 高地隙噴桿噴霧機研究和發(fā)展趨勢[J]. 中國農機化學報,2017,38(2):38-42.Lin Liheng, Hou Jialin, Wu Yanqiang, et al. Review and development trend of high clearance boom sprayer[J].Journal of China Agricultural Mechanization, 2017, 38(2): 38-42. (in Chinese with English abstract)
[5] Bell T. Automatic tractor guidance using carrier-phase differential GPS[J]. Computers and Electronics in Agriculture,2000, 25(1/2): 53-66.
[6] Li Taochang, Hu Jingtao, Gao Lei, et al. Research on straight-line path tracking control methods in an agricultural vehicle navigation system[C]// The 11th International Conference on Precision Agriculture. Indianapolis, Indiana,USA, 2012.
[7] 張智剛,羅錫文,周志艷,等. 久保田插秧機的 GPS 導航控制系統(tǒng)設計[J]. 農業(yè)機械學報,2006,37(7):95-97.Zhang Zhigang, Luo Xiwen, Zhou Zhiyan, et al. Design of navigation control system for rice transplanter[J].Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(7): 95-97. (in Chinese with English abstract)
[8] 羅錫文,張智剛,趙作喜,等. 東方紅X-804拖拉機的DGPS自動導航控制系統(tǒng)[J]. 農業(yè)工程學報,2009,25(11):139-145.Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for dongfanghong X-804 tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 139-145. (in Chinese with English abstract)
[9] 劉兆祥,劉剛,籍穎,等. 基于自適應模糊控制的拖拉機自動導航系統(tǒng)[J]. 農業(yè)機械學報,2010,41(11):148-152,162.Liu Zhaoxiang, Liu Gang, Ji Ying, et al. Autonomous navigation system for agricultural tractor based on self-adapted fuzzy control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(11): 148-152,162. (in Chinese with English abstract)
[10] 偉利國,張權,顏華,等. XDNZ630型水稻插秧機 GPS自動導航系統(tǒng)[J]. 農業(yè)機械學報,2011,42(7):186-190.Wei Liguo, Zhang Quan, Yan Hua, et al. GPS automatic navigation system design for XDNZ630 rice trans planter [J].Transactions of the Chinese Society for Agricultural Machinery,2011, 42(7): 186-190. (in Chinese with English abstract)
[11] 熊中剛,葉振環(huán),賀娟,等. 基于免疫模糊PID的小型農機路徑智能跟蹤控制[J]. 機器人,2015,37(2):212-222.Xiong Zhonggang, Ye Zhenhuan, He Juan, et al. Small agricultural machinery path intelligent tracking control based on fuzzy immune PID[J]. Robot, 2015, 37(2): 212-222. (in Chinese with English abstract)
[12] 張美娜,呂曉蘭,陶建平,等. 農用車輛自主導航控制系統(tǒng)設計與試驗[J]. 農業(yè)機械學報,2016,47(7):42-47.Zhang Meina, Lü Xiaolan, Tao Jianping, et al. Design andexperimental of automatic guidance control system in agricultural vehicle[J]. Transactions of the Chinese Societyfor Agricultural Machinery, 2016, 47(7): 42-47. (in Chinese with English abstract)
[13] O’Connor M L. Carrier-Phase Differential GPS for Automatic Control of Land Vehicles[D]. Stanford: Stanford University, 1997.
[14] Bell T. Precision Robotic Control of Agricultural Vehicles on Realistic Farm Trajectories[D]. Stanford: Stanford University,1999.
[15] Erkan K, Erdal K, Herman R, et al. Towards agrobots:Identification of the yaw dynamics and trajectory tracking of an autonomous tractor[J]. Computers and Electronics in Agriculture, 2015(115): 78-87.
[16] Han Xiongzhe, Hak Jinkim, Joon Yongkim, et al.Path-tracking simulation and field tests for an auto-guidance tillage tractor for a paddy field[J]. Computers and Electronics in Agriculture, 2015(112): 161-171.
[17] 孟慶寬,仇瑞承,張漫,等. 基于改進粒子群優(yōu)化模糊控制的農業(yè)車輛導航系統(tǒng)[J]. 農業(yè)機械學報,2015,46(3):29-36.Meng Qingkuan, Qiu Ruicheng, Zhang Man, et al.Navigation system of agricultural vehicle based on fuzzy logic controller with improved particle swarm optimization algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 29-36. (in Chinese with English abstract)
[18] 張萬枝,白文靜,呂釗欽,等. 線性時變模型預測控制器提高農業(yè)車輛導航路徑自動跟蹤精度[J]. 農業(yè)工程學報,2017,33(13):104-111.Zhang Wanzhi, Bai Wenjing, Lü Zhaoqin, et al. Linear time-varying model predictive controller improving precision of navigation path automatic tracking for agricultural vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017,33(13): 104-111. (in Chinese with English abstract)
[19] Seong In Cho, Jae Hoon Lee. Autonomous speed sprayer using differential global positioning system, genetic algorithm and fuzzy control[J]. Journal of Agricultural Engineering Research, 2000,76(2):111-119.
[20] Nagasaka Yoshisada, Saito Hidefumi, Tamaki Katsuhiko, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit[J]. Journal of Field Robotics,2009, 26(6/7): 537-548.
[21] 郭娜,胡靜濤,王鶴. 基于 GPS 導航的插秧機作業(yè)控制系統(tǒng)[J]. 農業(yè)機械學報,2013,44(1):200-204.Guo Na, Hu Jingtao, Wang He. Intelligent operation control system for rice transplanter based on GPS navigation[J].Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 200-204. (in Chinese with English abstract)
[22] Hiroki Kurita, Michihisa Iida, Wonjae Cho, et al. Rice Autonomous Harvesting: Operation framework[J]. Journal of Field Robotics 2017,34(6), 1084-1099.
[23] 劉豹,唐萬生. 現(xiàn)代控制理論[M]. 3版. 北京:機械工業(yè)出版社,2011:193-200.
[24] John W. Peake. Method and Apparatus for Automatic Vehicle Guidance Using Continuous 2-D Poly-Point Path:US 813145B2[P]. 2012-05-06.
[25] Qiu H, Zhang Q. Feedforward-plus-proportional-integralderivative controller for an off-road vehicle electrohydraulic steering system[J]. Journal of Automobile Engineering, 2003,217(5): 375-382.
[26] 吳曉鵬,趙祚喜,張智剛,等. 東方紅拖拉機自動轉向控制系統(tǒng)設計[J]. 農業(yè)機械學報,2009,40(增刊):1-5.Wu Xiaopeng, Zhao Zuoxi, Zhang Zhigang, et al.Development of automatic steering control system based on dongfanghong tractor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(Supp.l): 1-5. (in Chinese with English abstract)
[27] 黃沛琛,羅錫文,張智剛. 改進純追蹤模型的農業(yè)機械地頭轉向控制方法[J]. 計算機工程與應用,2010,46(21):216-219.Huang Peichen, Luo Xiwen, Zhang Zhigang. Control method of headland turning based on improved pure pursuit mode for agricultural machine[J]. Computer Engineering and Applications, 2010, 46(21): 216-219. (in Chinese with English abstract)
[28] 籍穎,張漫,劉剛,等. 農業(yè)機械導航系統(tǒng)綜合評價方法[J]. 農業(yè)機械學報,2010,41(12):160—164.Ji Ying, Zhang Man, Liu Gang, et al. Synthetically evaluation of agriculture machine navigation system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12):160-164. (in Chinese with English abstract)
[29] 胡書鵬,尚業(yè)華,劉卉,等. 拖拉機轉向輪轉角位移式和四連桿式間接測量方法對比試驗[J]. 農業(yè)工程學報,2017,33(4):76-82.Hu Shupeng, Shang Yehua, Liu Hui, et al. Comparative test between displacement and four-bar indirect measurement methods for tractor guide wheel angle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 76-82. (in Chinese with English abstract)
[30] 溫琦,陳志,王志,等. 搖擺環(huán)境輪式牽引車輛行駛偏移特性仿真分析[J]. 農業(yè)機械學報,2011,42(6):28-32.Wen Qi, Chen Zhi, Wang Zhi, et al. Driving deviation properties simulation and analysis of wheeled tractors under ship sway [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 28-32. (in Chinese with English abstract)
[31] 毛罕平,倪靜,韓綠化,等. 高地隙液壓四輪驅動噴霧機轉向防滑控制系統(tǒng)[J]. 農業(yè)機械學報,2012,43(6):58-62.Mao Hanping, Ni Jing, Han Lühua,et al.Turning anti-slip control system of hydraulic four-wheel drive high clearance sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 58-62. (in Chinese with English abstract)
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08