類車體超車過程流場特性分析研究
2018-01-17 06:43:06王瑞麗
鋒繪 2018年5期

摘要:本文采用低雷諾數(Re)SSTk-ε模型和高雷諾數(Re) SSTk-ε模型兩種方法來模擬類車體超車過程。分析研究了類車體超車過程中典型時刻周圍流體的壓力場,同時,分析研究了典型時刻的速度場,為以后研究實車的超車過程提供了依據。
關鍵詞:類車體;數值模擬;超車;流場
1 引言
兩輛相向運動的汽車,其周圍空氣流動變化劇烈,同時,這種空氣流動是無規則的,也就是說,此流動隨時間和空間都呈現出不規則的脈動,俗稱湍流流動。為了能夠更好地模擬汽車超車過程中車體周圍的空氣流動,首先對汽車進行了簡化,簡化后的模型稱其為類車體(Ahmed Car)。類車體超車過程雖然不能夠完全真實地展示出汽車在超車過程中車體周圍的流場及其氣動特性,但其與汽車超車過程中的車體周圍的流場及氣動特性的變化趨勢基本一致。
與汽車運動一致,簡化后的類車體(Ahmed Car)在運動過程中,其周圍流場具有湍流特性。為了更好地模擬類車體超車過程中其車體周圍的流場特性,本文選用7:10的類車體縮尺模型,采用雷諾平均數值模擬的方法,模擬Ahmed Car的超車過程,根據模擬結果,分析超車過程中車體周圍流場的流動特性。
2 幾何模型、流暢空間離散及計算方法
在研究類車體超車過程中,類車體幾何模型結構及相關尺寸如圖1所示。圖中尾部傾角a為300,在兩種類型的雷諾數計算過程中,該傾角保持不變。
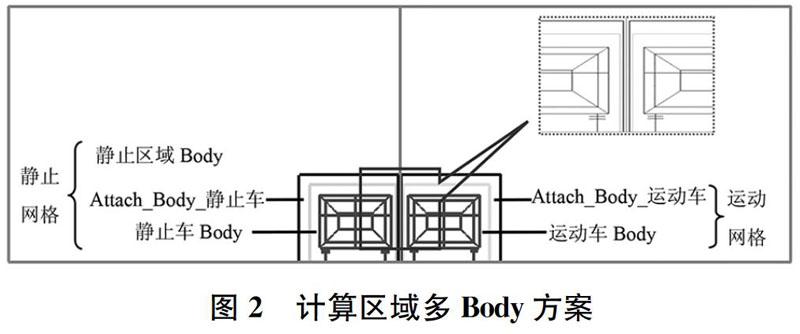
利用ICEM網格劃分軟件,在網格劃分過程中,將整個模型分為5個子模塊,分別對5個子模塊進行網格化分,在參數設置前,利用STAR-CD軟件中的耦合技術,將5個模型合為一體。同時,根據流場流動的特點,并結合滑移網格化的需要,在網劃分過程中應用了5Body(圖2所示)的做法。
本文中,低雷諾數計算模型網格總數約為598萬,高雷諾數計算模型網格總數約為470萬。在網格劃分過程中,結合后期模擬過程,并運用相對運動原理,可將整個網格分為兩種類型,即相對運動網格和相對靜止網格,不同計算中,相對靜止網格分布基本一致,而網格數量的差異在運動網格布置上,網格布置方式主要依據了流體運動的特性。
類車體外部繞流的氣流形態主要有兩種:層流和湍流。對層流而言,流體流動是有規律的分層流動,層與層之間的流動互不干擾;湍流狀態,流體流動是不規則的,流場中流體的速度、壓力等隨時間和空間都呈現出不規則的脈動。
在本模型中,設置溫度為25℃,運動粘性系數υ=1.55×10-5m2/s,空氣密度為ρ=1.1805kg/m3;采用雷諾平均數值模擬中的低雷諾數SSTk-ε模型和高雷諾數SSTk-ε兩種方法來模擬類車體超車過程,之后,對模擬結果進行分析研究。
3 計算結果
3.1 基于低雷諾數湍流模型模擬
類車體超車過程中,對流場特性分析,主要通過壓力云圖和速度矢量圖來分析車體周圍流體流動的特點。在整個分析過程中,以車體中間水平切面作為集中,繪制出類車體超車過程中的壓力云圖和速度矢量圖的俯視圖,同時,選取典型的時刻,在這特定時刻下,分析車體周圍流場特性。
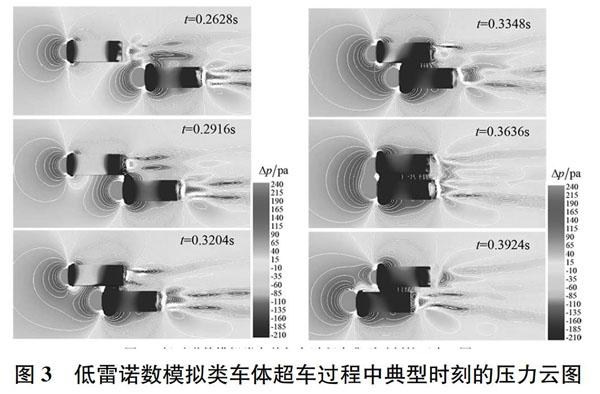
圖3為低雷諾數模擬類車體超車過程中典型時刻的壓力云圖。圖中展示了車體在即將開始超車至兩車頭頭開始遠離的整個過程中車體及周圍空氣流動的壓力變化。從圖中可以看出,在整個運動過程中,相對運動車車頭前方適中處于正壓區,該正壓區的壓力在整個超車過程中一致保持高壓;與此相對應,在相對運動車尾部形成較強烈渦稱其為尾渦區,由于選取截面靠近支柱,受到圓柱繞流的影響,兩車體尾部均出現了兩個較為明顯的大尺度渦。
在時間t=0.2628s時,相對運動車即將靠近相對靜止車,此時,兩車體周圍的流場開始相互影響,車體周圍的空氣流動逐漸加劇,靜止車周圍的空氣流動受運動車的影響較大,靜止車尾部開始形成尾渦區。在t=0.2916s時,兩車的頭尾相遇,此時,靜止車的尾渦區已經形成,同時,受相對運動車的影響,其車體尾部流場的負壓區逐漸增大。在t=0.3204s~0.3635s的范圍內,兩車的頭頭(或尾尾)即將相遇,在這個過程中,相對靜止車周圍的流場變化較大,其變化如下:相對靜止車車體周圍的空氣流動受相對運動車的影響,流動加強,車體頭部正壓區范圍增大,整個車體周圍的負壓區增大至整個車身,尾渦區的范圍亦擴大。在t=0.3636s的時刻,兩車的頭頭(或尾尾)相遇,此時,練車車頭前方的正壓區連成一體,范圍達到最大,兩車體車身周圍處于負壓區,尾部尾渦區較尾尾相遇錢有所減小,壓力有所上升。之后,隨著類車體的運動,兩車開始遠離,在t=0.0.3924s的時刻,運動車車頭已經超過了靜止車車尾,這使得靜止車車尾和兩類車體之間橫向空間的負壓逐漸升高,可以預測,在之后的運動過程中,兩車周圍的流場開始逐漸恢復,直至兩車超車過程結束。
圖4為低雷諾數模擬類車體超車過程中典型時刻的速度矢量圖。為了與壓力云圖相對應,速度矢量圖選取的典型時刻與壓力云圖的一致。從圖中可以看出,在整個超車過程中,隨著兩列車的靠近,車體尾部的空氣流速逐漸降低,兩個頭頭相遇(或尾尾相遇)時,兩車體尾部靠近尾部的流動速度接近于零,這意味著在車體尾部形成了渦結構,隨著兩車的靠近,尾部渦結構逐漸增大,反之,隨著兩車體開始遠去,渦結構逐漸變小,直至超車結束。
3.2 基于高雷諾數湍流模型模擬
圖5高雷諾數模擬類車體超車過程中典型時刻的壓力云圖。從圖中可以看出,在t=0.2628s時,受相對運動車的影響,相對靜止車周圍空氣流動加劇;t=0.2916s時,兩車尾頭相遇,此時,相對運動車周圍的流場變化不大,但是,相對靜止車車尾部及其車身周圍流場的運動開始加劇,在尾部開始形成渦結構,運動至t=0.3636s時,兩車頭頭相遇(或尾尾相遇),在兩車體尾部均形成的可見的渦結構,但與低雷諾數模擬的結果相比,渦結構并不十分明顯。
總體上來說,兩車體尾尾(或頭頭)相遇過程中的車身及周圍流場壓力變化與低雷諾數湍流模型模擬中的圖3所表示的結果基本一致,所不同的是高雷諾數湍流模型模擬結果中車體尾部空間的流場渦尺度并不像低雷諾數湍流模型模擬的尺度大,這表明了高雷諾數湍流模型模擬捕捉流場壓力變化的特性弱于低雷諾數湍流模型模擬。
圖5高雷諾數模擬類車體超車過程中典型時刻的速度矢量圖。從圖中展示了高雷諾數模擬過程中兩車在超車過程車體周圍流場的變化情況。對比低雷諾數模擬結果,從圖中不難看出,車體周圍空氣流動的大小與方向與低雷諾數模擬結果一致。
4 結論
根據數值模擬計算結果分析發現,兩種雷諾數湍流模型模擬類車體超車過程中流場特性圖可知,類車體車頭前方為正壓區,兩列車之間的橫向空間為負壓區;車體尾部形成尾渦區,靠近車體處渦尺度較小,受支柱繞流影響,在距離尾部一段距離處形成了較為對稱的大尺度渦,同時,高雷諾數湍流模型模擬捕捉流場壓力變化的特性弱于低雷諾數湍流模型模擬。
參考文獻
[1]米海蓉.方形鈍體繞流湍流場特征參數研究[D].哈爾濱工程大學博士學位論文,2012.
[2]王瑞麗.高速列車駛入隧道氣動效應數值模擬研究[D].蘭州交通大學碩士學位論文,2015.
[3]enter F R.Two equation eddy viscosity turbulence models for en-gineering applications[J].AIAA Journal,1994,32:1598-1605.
[4]林鐵平.汽車外流場DES模擬研究[D].湖南大學碩士學位論文,2010.
[5]武青海,周虹偉,朱勇更.高速列車湍流流場數值仿真計算探討[J].鐵道學報,2002,24(3):99-103.
[6]MC.Noger,C.Regardin,E.Szechenyi.Investigation of the transi-ent aerodynamic phenomena associated with passing manoeuvres[J].Journal of Fluids and Structures,2005,(21):231-241.
