時變論域下紅綠燈配時的語言動力學分析
2018-01-08 03:00:44莫紅郝學新
自動化學報 2017年12期
關鍵詞:語言
莫紅 郝學新
時變論域下紅綠燈配時的語言動力學分析
莫紅1郝學新1
城市道路不同時刻的車流量變化很大,建立與車流量變化相適應的紅綠燈動態配時模型有利于緩解交通擁堵,減少出行者的等待時間.本文通過綜合時變論域、平行控制理論、語言動力系統(Linguistic dynamic system,LDS),提出了一種新的紅綠燈控制方法.該方法以紅綠燈不同時刻周期時長所形成的序列為時變論域,由各相位的排隊長度確定對應的通行序列與時長,得到時變論域下紅綠燈配時方案.該方案形成一個由實時車流數據驅動的動態模糊規則庫來對紅綠燈配時周期及相位通行序列與時長進行動態調整,進而形成紅綠燈配時演化過程的語言動力學軌跡,最后通過實例驗證該方案的有效性.
紅綠燈配時,時變論域,模糊邏輯,語言動力系統
近年來,交通系統的理論與方法研究受到了人們的廣泛關注[1?3].然而,交通系統作為一個復雜系統,行人、機動車輛行為的隨機性及不可預測性增加了對其建立精確數學模型的難度,采用傳統的方法對交通系統進行控制很難達到令人滿意的效果.尤其是在車輛及行人集中的交叉路口,各種交通流(機動車、非機動車和行人)反復地合流、分流及交叉,使得交通狀況異常復雜,所以城市交通擁堵主要集中在交叉口處,因此,提高交叉路口的通行效率是緩解交通擁堵的關鍵之一.
紅綠燈是疏導交叉路口交通流的一種有效方法,合理的紅綠燈配時方案有利于提高道路通行能力,減少交通事故的發生.傳統的紅綠燈控制大都采用固定信號周期、固定時長和固定相位轉換次序的方法,無法對路口信號進行實時、經濟的控制,因而經常出現“綠燈無車紅燈堵”的現象,在早晚高峰期及節假日尤為明顯.
隨著計算機交通控制系統、傳感器技術、電子技術和智能控制的發展,通過信息化手段實現的智能交通系統[4](Intelligent transport system,ITS)管理調度交通資源,為解決當前道路交通擁堵問題提供了一條有效途徑.在智能交通系統中,先進的信息技術、數據通訊傳輸技術、電子傳感技術、電子控制技術及計算機處理技術等被集成運用于整個地面交通管理系統,并建立起一種在大范圍內、全方位發揮作用的實時、準確、高效的綜合交通運輸管理系統[5].
針對交通燈配時不合理這一現象,Pappis等在1977年開始智能紅綠燈的研究[6],提出了通過建立模糊規則庫或者專家系統對各種交通狀況進行控制[7],并取得了很好的效果.Bi等[8]和Balaja等[9?10]針對路網中多個路口建立二型模糊控制器,然而二型模糊集合控制器增加了計算的復雜性,且不適用于單交叉路口.Collotta等[11]通過無線傳感器網絡(Wireless sensor networks,WSN)收集路口車流數據,對多相位路口建立多個平行模糊控制器,分別進行模糊決策.Abbas等[12]提出了一種改進的車流數據收集及紅綠燈配時方法,并通過仿真驗證了該方法的優越性.在國內,陳洪等在Pappis的基礎上,設計了多級模糊控制器[13],Li等討論了深度增強學習與平行系統理論在紅綠燈配時及交通流控制中的應用[14?15],Abdi等研究了模糊集合在交通方面的應用主要針對短時交通流量的預測[16?17]和實時控制計算[18].
另外,國內還運行著一些自適應信號控制系統,如 SCOOT(Split-cycle-oあset optimization technique)與SCATS(Sydney coordinated adaptive traきc system)等,但由于其控制原理等多方面的限制,在過飽和狀態下的控制效果不佳,其目前的版本SCOOT MC3[19](Managing congestion,communication and control)中,雖然加入了擁堵監控模塊,但也只能處理常發性擁堵,不能很好地處理異常情況導致的偶發性擁堵.針對實時路況,一些自適應學習算法也被廣泛應用于路口的信號控制,如Wiering等研究了基于車輛投票的強化學習優化模型,通過估計每個車輛的等待時間決定配時方案[20],Box等將具有人工干預的監督學習和時間差分強化學習應用于信號配時優化[21?22],劉臍鍾等提出將改進的遺傳算法用于區域交通信號的優化控制模型中[23],Bingham使用神經網絡調整模糊交通信號控制器的成員函數,使用強化學習評估神經網絡采用行為的效用,改進了模糊控制的效果[24],以上研究結果均證明自適應控制效果優于定時控制、感應式控制等.
針對復雜系統建模、分析、控制與管理問題,國內學者于1995年提出了語言動力系統(Linguistic dynamic systems,LDS)理論.在LDS理論中,詞計算代替常規的數值與符號計算,以期從語言的層次上解決復雜系統的建模、分析、控制與評估問題,形成關于復雜系統狀態演化的動態描述,并在2004年提出了平行系統理論[25?26],構建了平行交通管理系統的體系框架[27].為了有效解決交叉路口紅綠燈配時問題,建立與交通流狀況相一致的紅綠燈配時方案,本文通過綜合時變論域[28]、語言動力學理論[29]及平行控制理論[26],提出了平行紅綠燈的理論與方法,來對紅綠燈的配時策略進行實時調整,并提出平行控制策略.本文中,時變論域理論被用來描述其周期及定義在該周期上的各相位配時的模糊集合.
本文的紅綠燈配時具有以下特點:首先,模糊集合所在論域隨時間變化而改變,以描述紅綠燈的配時周期隨交通流的變化而改變的情形,且模糊集合的隸屬函數根據周期的變化狀況進行實時調整;其次,本文配時方案對應的模糊規則庫由人工紅綠燈在各種交通流狀況下,以出行者平均等待時間最短為目標經過計算實驗的結果而得;再次,本文的配時方案是實時的,即在不同的時間,隨著交通流的變化,配時周期及各相位的時長與交通流的狀況相適應;最后,本文采用時變論域下的語言動力系統結合平行控制理論來對紅綠燈配時的演化過程進行動態描述,這也是本文獨有的.對交通流進行有效的引導和調度,能夠使交通流保持在一個平穩的運行狀態,避免或者緩和交通擁擠,有利于提高交通流通行效率,減少交通事故,降低污染與能源消耗.
本文安排如下,第1節介紹相關定義與術語;第2節針對紅綠燈配時設計,給出了基于平行控制的紅綠燈系統的結構方案及數據處理流程;第3節建立了人工紅綠燈系統的配時方案;第4節根據某交叉路口24小時內不同時間段的配時方案進行動態設計及語言動力學演化分析;第5節為本文小結.
1 預備知識
1.1 一型模糊集合與隸屬函數
1965年,Zadeh提出模糊集合理論[30].設ω為論域?上的模糊集合,表示為

這里,稱ω為?上的一型模糊集合,μω(·)被稱為模糊集合ω的隸屬函數,μω(x)稱為x對于ω的隸屬度,且0≤μω(x)≤ 1.
若?為一個連通的單因素論域,表示為?=[x1,xn],對應的模糊集合通常為一個分段連續函數,即
1.2 時變論域
論域為研究對象全體構成的集合,若集合中的元素隨時間改變,則稱該論域為時變論域[28],記為?t.若對任意t,都有?t=?,則稱恒定論域.一般情況下,取 t=1,···,n,···,則形成一個時變論域序列

簡記為{?n,n∈N},N 為自然數.若論域?n是離散的,記為

稱?n為離散時變論域.若每一個?n連通,即

則稱?n為連通時變論域.
當論域隨時間發生變化時,對應的模糊集合的隸屬函數隨之改變,根據論域變化的特點,時變論域被分成遞增型、遞減型及波動型三種情況.
1.3 語言動力系統
在LDS中,詞計算代替了常規的數值符號計算.對于一個控制系統來說,其狀態方程、輸出方程、反饋方程經過抽象化以轉化為對應的語言形式,即語言動力系統的狀態方程、輸出方程與反饋方程[29]:
LDS的狀態方程

LDS的輸出方程

LDS的反饋方程

其中,Z={0,1,···,K},X(k)∈IN為系統的狀態詞,Y(k)∈IP為輸出詞,V(k)∈IQ為輸入詞,U(k)∈IP為控制詞,k∈{1,2,···,n,···}為離散的時間序列,且F,H,R均為模糊邏輯算子,分別定義了LDS的系統、輸出及控制映射.若該系統為自治系統,當U(k)=F?(X(k))時,將輸出方程代入反饋方程,再代入狀態方程,則

給定初始狀態X(0),由式(9)可得X(1),如此下去,有

這樣形成了關于初始狀態的語言動力學軌跡.
1.4 平行交通系統
平行交通系統(ACP)由人工交通系統(Artifi cial systems)、計算實驗(Computational experiment)及平行執行(Parallel execution)三部分組成[25].綜合考慮各方面的因素,采用理論建模等方法建立與實際系統“等價”的人工系統,解決實際交通系統無法用傳統方法建模的難題[31],通過二者的相互作用,完成對實際交通系統的管理與控制,對相關行為和決策的實驗與評估,相應地調節各自的控制與管理方式.本文結合時變論域、平行交通系統及語言動力系統開展紅綠燈配時方面的工作.
2 紅綠燈配時系統結構
為了實現對單交叉路口紅綠燈時長的實時調整,本文提出一種根據實時車流數據調整配時周期、相位順序及各相位綠燈時長的平行(ACP)控制方案,結構如圖1所示,該系統包括人工紅綠燈、計算實驗和平行執行三個層次.
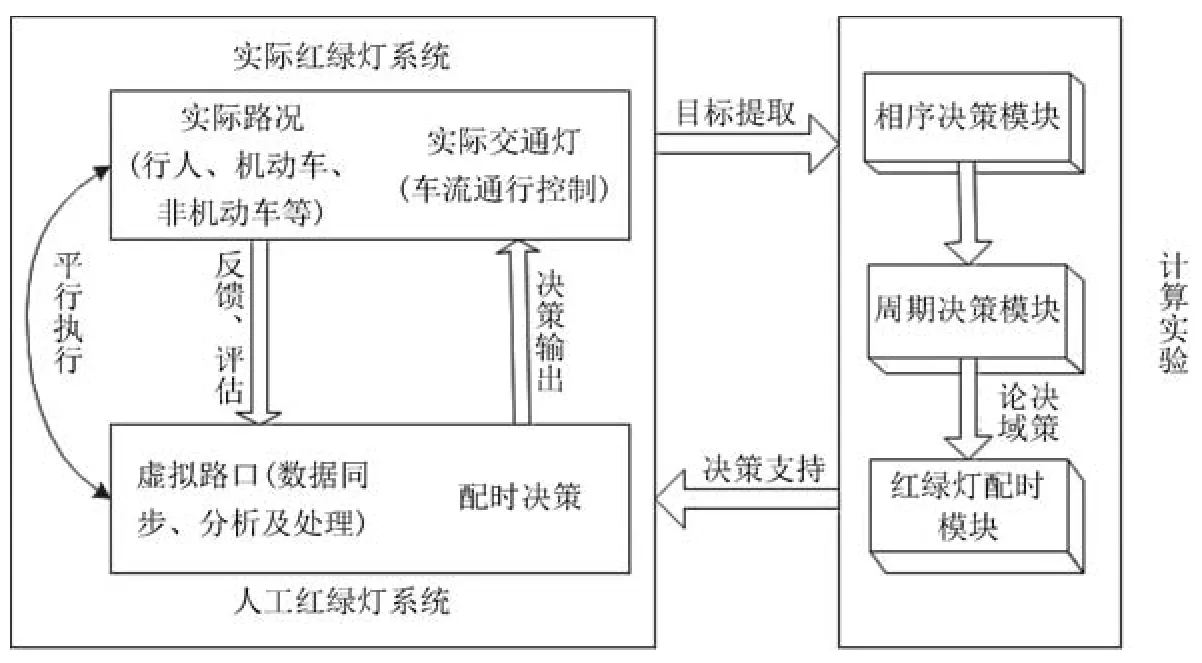
圖1 紅綠燈系統結構Fig.1 Architecture of traきc light timing system
人工紅綠燈為與實際紅綠燈“等價”的虛擬系統,包括與實際路況同步運行的虛擬路口與虛擬的交通流,通過數據采集傳輸等將實時路況數據傳輸至虛擬路口,包括實際路況運行情況、配時決策模塊,其中,配時決策模塊為平行系統中的計算實驗模塊,具體分為以下幾個模塊:
1)相序決策模塊,根據各相位實時車流數據計算相位優先級,作為下一周期相位執行順序;
2)周期決策模塊,由該路口歷史車流數據經模糊決策確定該時段內周期所在區間,作為各相位配時的論域;
3)紅綠燈配時模塊,根據時變論域理論及模糊集合的詞計算,由實時數據計算各相位綠燈時長.
紅綠燈配時模塊中,給出交叉路口人工紅綠燈配時方案,根據交叉路口特征及車輛排隊長度Wi,i=1,···,n,給出各種不同的配時周期與各相位時長的配時方案,并將各種不同的配時周期與相位時長加載于人工紅綠燈,通過計算實驗得出不同配時周期及相位時長下的出行者平均等待時間,進一步得出各相位在給定排隊長度下,以出行者等待時間最短為目標的配時周期與相位時長的方案,所有不同排隊長度下的最優配時周期與相位時長形成模糊配時規則庫,也就是說,本文中紅綠燈配時方案是由交通流狀況預先決定的.
計算實驗層中,根據收集到的交通流數據確定各相位在本周期內采集到的最大車流排隊長度,該數據經過兩次計算處理,如圖2所示,通過相序決策模塊計算相位優先等級,將紅綠燈配時模塊作為模糊控制器的輸入,經模糊化、模糊決策及逆模糊化等過程計算得到各相位綠燈時長.計算得到的配時方案經平行執行層輸入到實際紅綠燈中,紅綠燈執行層通過實際紅綠燈與人工紅綠燈的相互連接,對二者之間的行為進行對比和分析,完成對各自未來的狀況的“借鑒”和“預估”,相應地調節各自的控制方式,進而實施有效的配時方案.
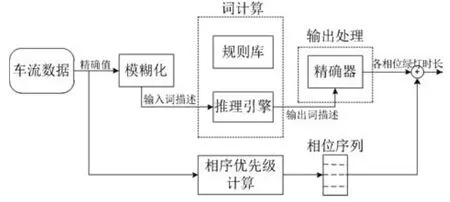
圖2 數據處理流程Fig.2 Data processing procedure
3 時變論域下紅綠燈配時的計算實驗
根據實際情況,一天內的不同時間段,交通流量的變化十分明顯,紅綠燈的配時周期需要進行相應調整,以提高交通流通行效率.本文以配時周期為論域,給出時變論域下配時周期的詞描述及平行控制策略,并結合相位優先級計算動態配時方案.
3.1 時變論域下紅綠燈周期及配時的詞描述
設{?1,?2,···,?k,···}為波動型連通時變論域序列,且?k連通,記為

對于三叉路口來說,通常設置為三個相位P1,P2,P3.實際情況下,每個相位的綠燈時間不低于7s,黃燈時間設置為3s.因此,一個周期的配時最少為30s.考慮到駕駛員的心理承受能力及其他因素,正常情況下,一個周期時長不多于150s,早晚高峰期可以適當延長,以適應車流量較大的狀況.設?(t)為論域,T(t)為持續時間,t為?(t)上的時間變量,t=0,1,2,···,形成時變論域序列

令 ?k=[0,30+20k],k=0,1,2,···,6,有:

其中

令Ti為各相位Pi分配的通行時間,有T=T1+T2+T3,其中,分別為相位Pi的綠燈和黃燈時間,i=1,2,3.綜上,有:

設{ωjk,j∈Z+}為定義在對應論域上的模糊集合,其隸屬函數隨著論域的變化而改變:

其中,C0=0,Cm0+1=30+20k,且

f0(x), ···,fm(x), ···,fmo(x) 分別為對應論域[c0,c1],···,(cm,cm+1],···,(cm0,cm0+1]上的連續函數.
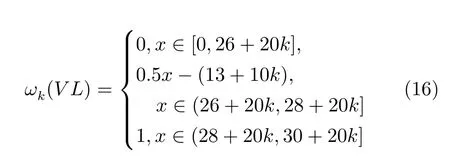
例如,論域?k上5個基詞“很短”、“短”、“中”、“長”、“很長”(分別表示為V S、S、M、L、V L).如在論域[0,30+20k](k=0,1,···,6)上的模糊集合“很長”(V L)定義為
3.2 配時方案
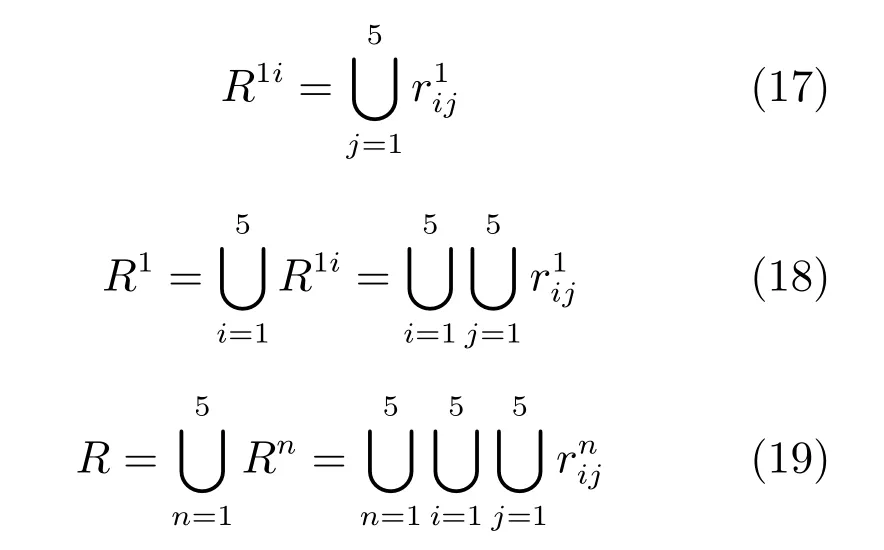
令Li為相位Pi的等候車輛排隊長度,用5個模糊集合(基詞)“很短、短、中、長、很長”覆蓋,每一相位Pi的排隊長度Li可以通過攝像頭采集得到.Ti為相位Pi分配的綠燈與黃燈時間之和,5個模糊集合“很短、短、中、長、很長”(S?、S、M、L、L?)定義在對應論域上.令ωit為定義在論域?(t)上的各相位配時的模糊集合,對于三相位的T型交叉路口,考慮所有可能的情況,建立模糊規則R,模糊規則由模糊規則Ri,i=1,···,5構成,每個Ri包含25條規則,表示如下(以R1為例):
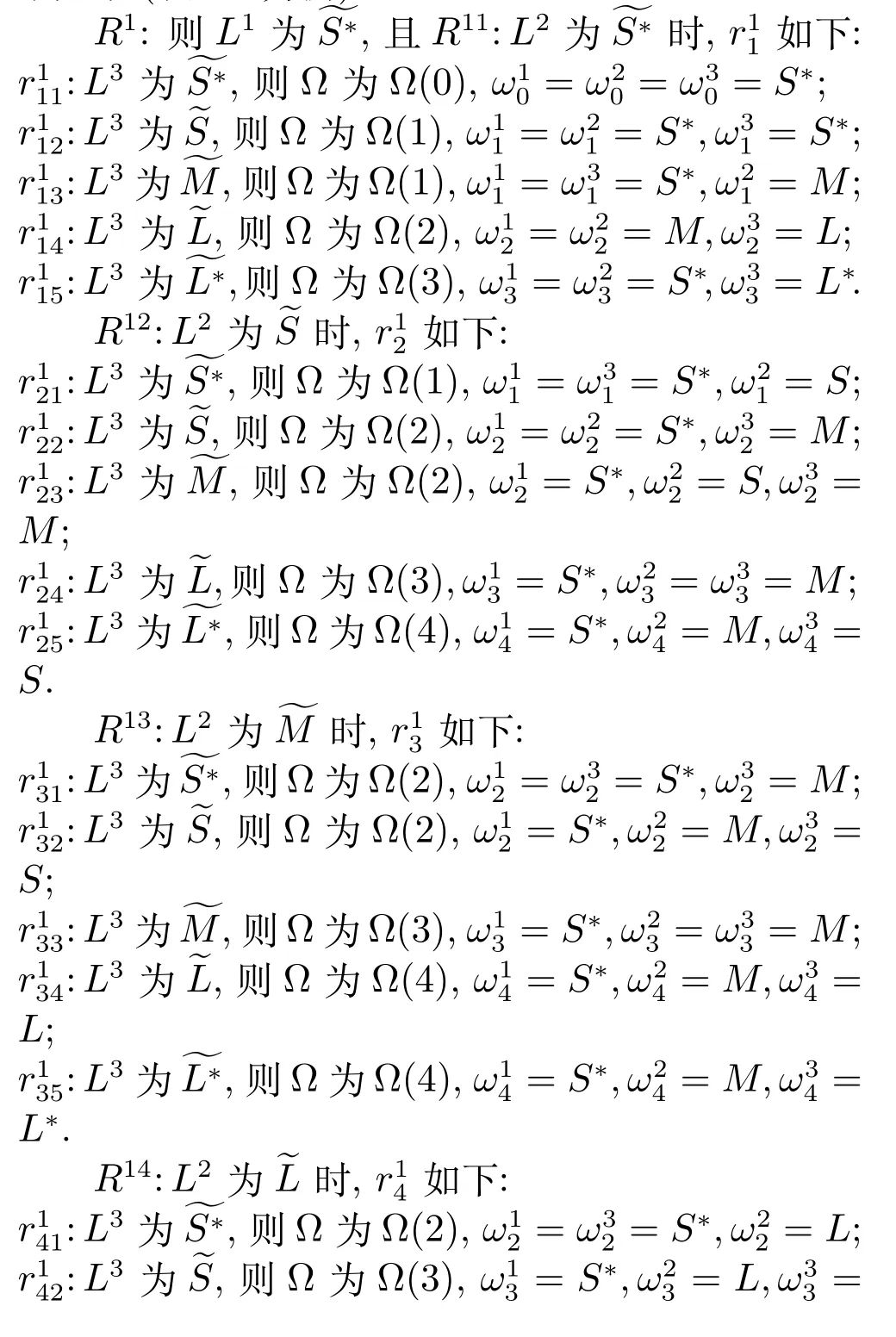

同理,當L1分別取模糊值時,對應的模糊規則分別為R2、R3、R4、R5.綜上,有:
通過路口攝像頭對路況的采集,將得到的車流長度數據模糊化后輸入模糊控制器,從而相應的模糊規則被激活,由匹配度法,計算出下一時刻的配時周期及各相位的配時時長.針對實時交通流量的各種情況,模糊規則給出了相應的配時周期及各相位時長,根據實時數據對模糊控制規則進行調整,由運算結果對實時交通流量進行控制,從而形成閉環控制策略,能夠達到較好的控制效果.
3.3 相位優先級的計算
對于同一交叉路口,不同時刻各個相位的交通流量呈現出不同的規律,因此,根據交叉路口交通流量實時調整相位序列有利于提高交通通行效率.本文根據實時排隊長度來計算相位優先級.
對某三叉路口設置p=3個相位(假設右轉不受紅綠燈限制),如圖3所示,每個相位有l條車道,則各相位的優先級別可由以下公式計算得到:

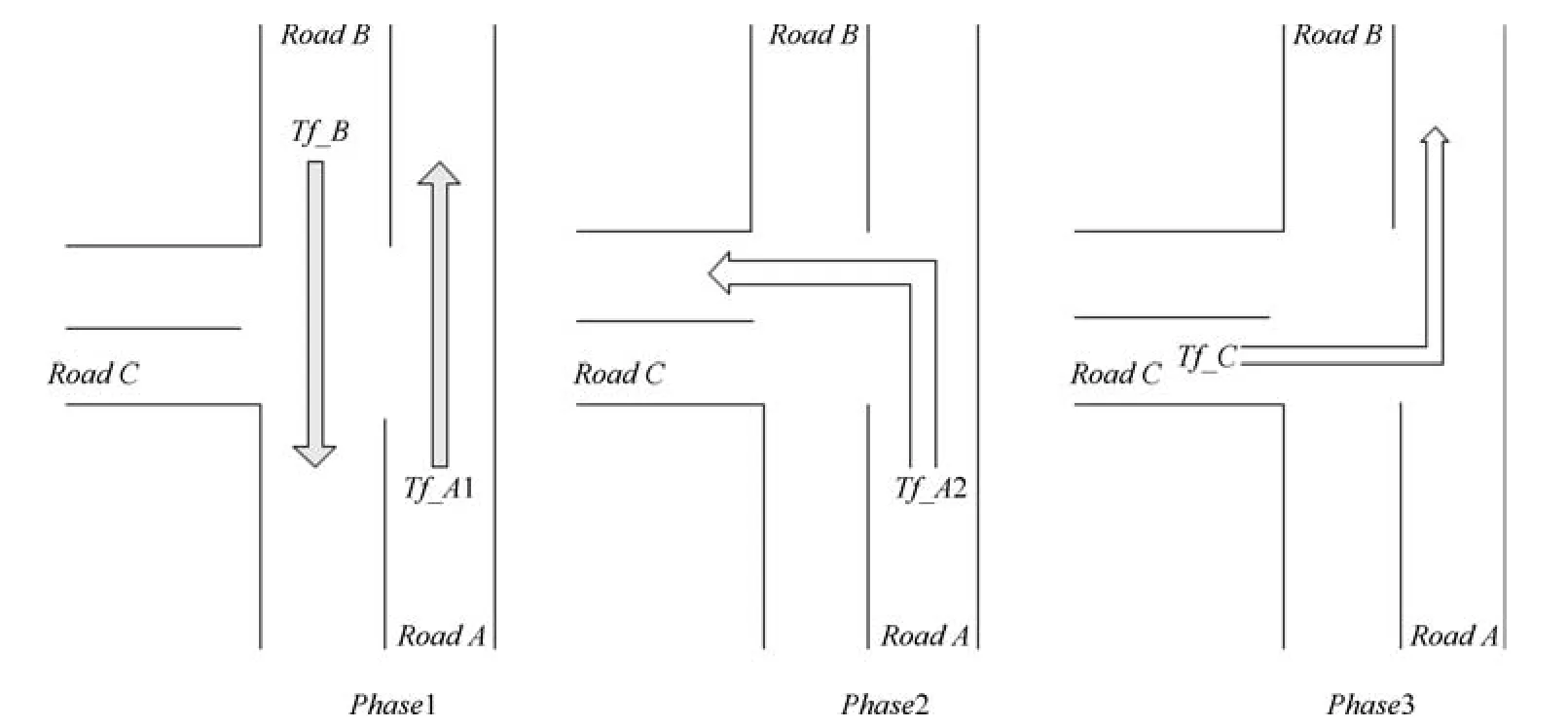
圖3 路口相位設置Fig.3 Traきc light phases
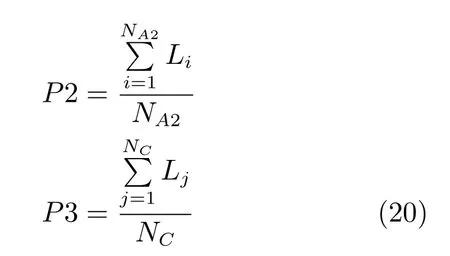
這里,P1,P2,P3分別為相位1,2,3的優先級別,NA1,NA2,NB,NC分別表示交通流方向Tf-A1,Tf-A2,Tf-B,Tf-C上的車道數量,Ln,Lm,Li,Lj分別為方向Tf -A1第n,Tf-A2第m,Tf-B第i,Tf-C第j條車道的排隊長度.
相位優先級是根據該時刻周期內檢測到的最大車流長度在該周期將要結束時計算得到,得到各相位的優先等級后,相序決策模塊將確定下一周期內的相位運行順序.結合時變論域下的紅綠燈的模糊配時算法得到下一周期內的配時方案.
4 實例分析
本文以北京市海淀區某T型路口為例,南北直行的雙向四車道為主干道,東西雙向二車道為次干道,如圖4所示.相關設定如表1所示.該路口交通狀況較為復雜,且呈現出一定的規律性.

表1 交叉路口相關設定Table 1 Related notations
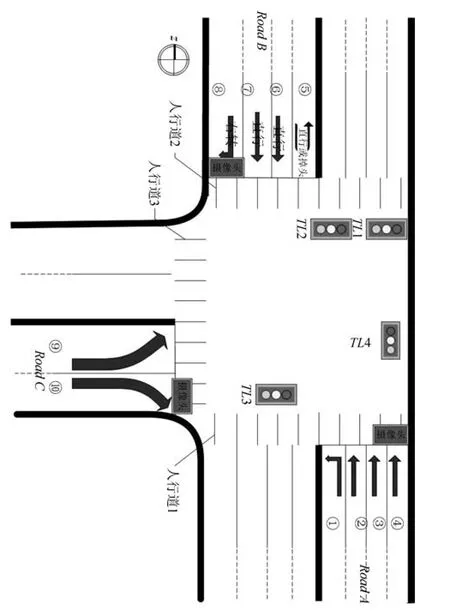
圖4 T型路口示意圖Fig.4 The intersection under study
4.1 周期時長的語言動力學分析
通過對上述路口進行數據采集,將一天的時間以5分鐘為單位,劃分為288個時間段,檢測每個時間段內通過該路口的車流總量,通過攝像頭每隔5分鐘從現場獲取一組交通流數據,該組數據就表示當前時刻所處時間段的實時交通數據.本文對全年數據進行抽樣調查,抽取不同月份(2、3、12月份)其中三個星期(不包括節假日)的數據,求其平均值,得到流量變化曲線如圖5~7所示.
由圖5可知,工作日內在凌晨 1:30~6:00,各相位車流量 “極小”,6:01~6:30,各相位車流量為 “很小”,6:31~7:00,各相位車流量為 “中”,7:00~8:30 各相位車流量為 “極大”,8:31~12:00 各 相 位 車 流 量 為 “很 大”,12:01~13:30,車流量為“大”,13:31~16:30,為“很大”,16:31~19:30,為“極大”,17:31~22:00,為“很大”,22:01~23:00,為 “中”,23:01~1:00,為 “小”,1:01~1:30,為“極小”.根據車流量不同時刻的變化規律及控制策略,設定凌晨1:30~6:00時間段的交通信號燈為黃燈閃爍的警示信號,隨后各時間段的周期設定為
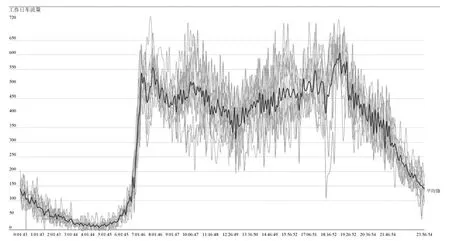
圖5 工作日車流量Fig.5 Traきc fl ow of workdays
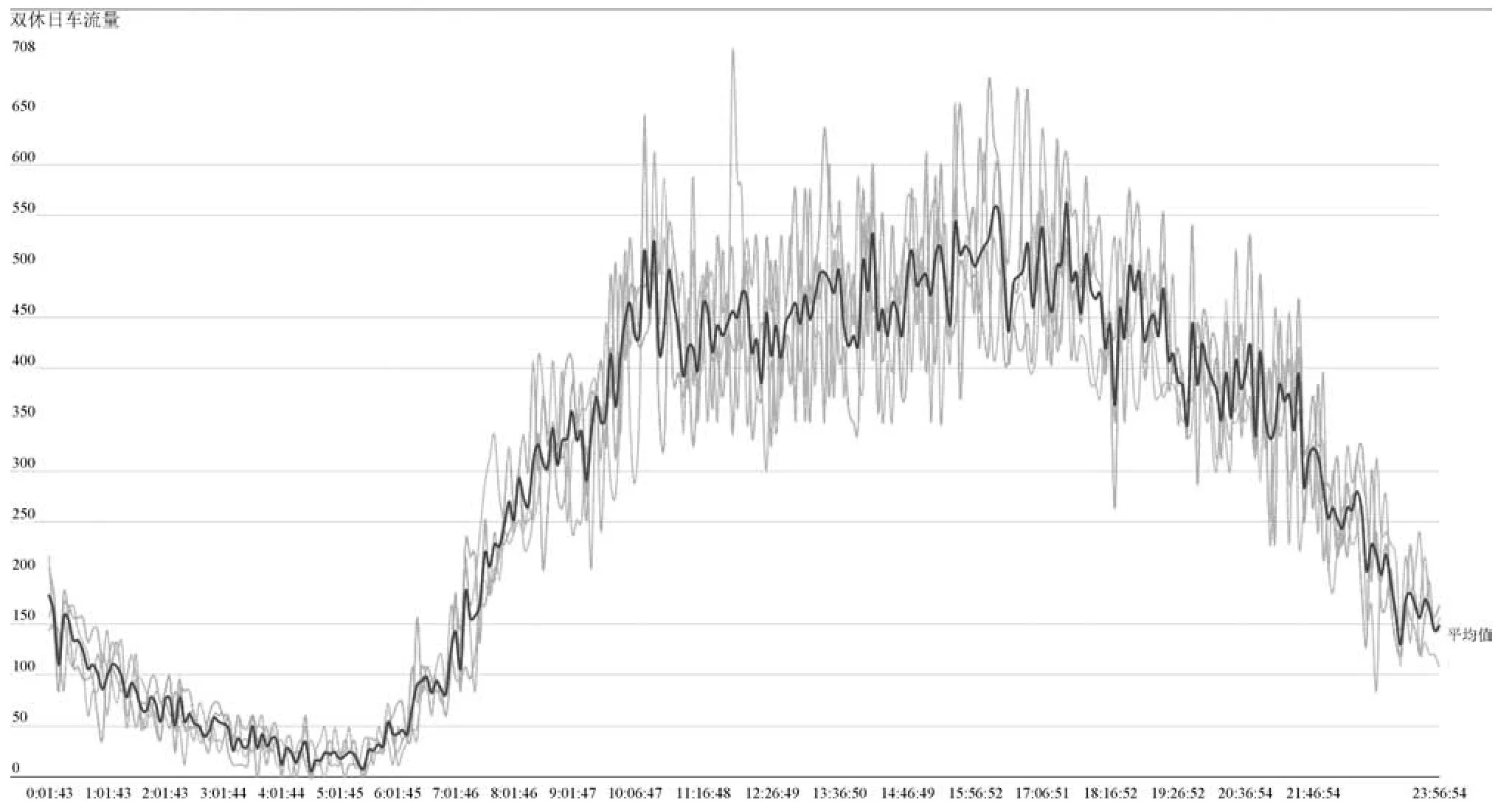
圖6 雙休日車流量Fig.6 Traきc fl ow of weekends
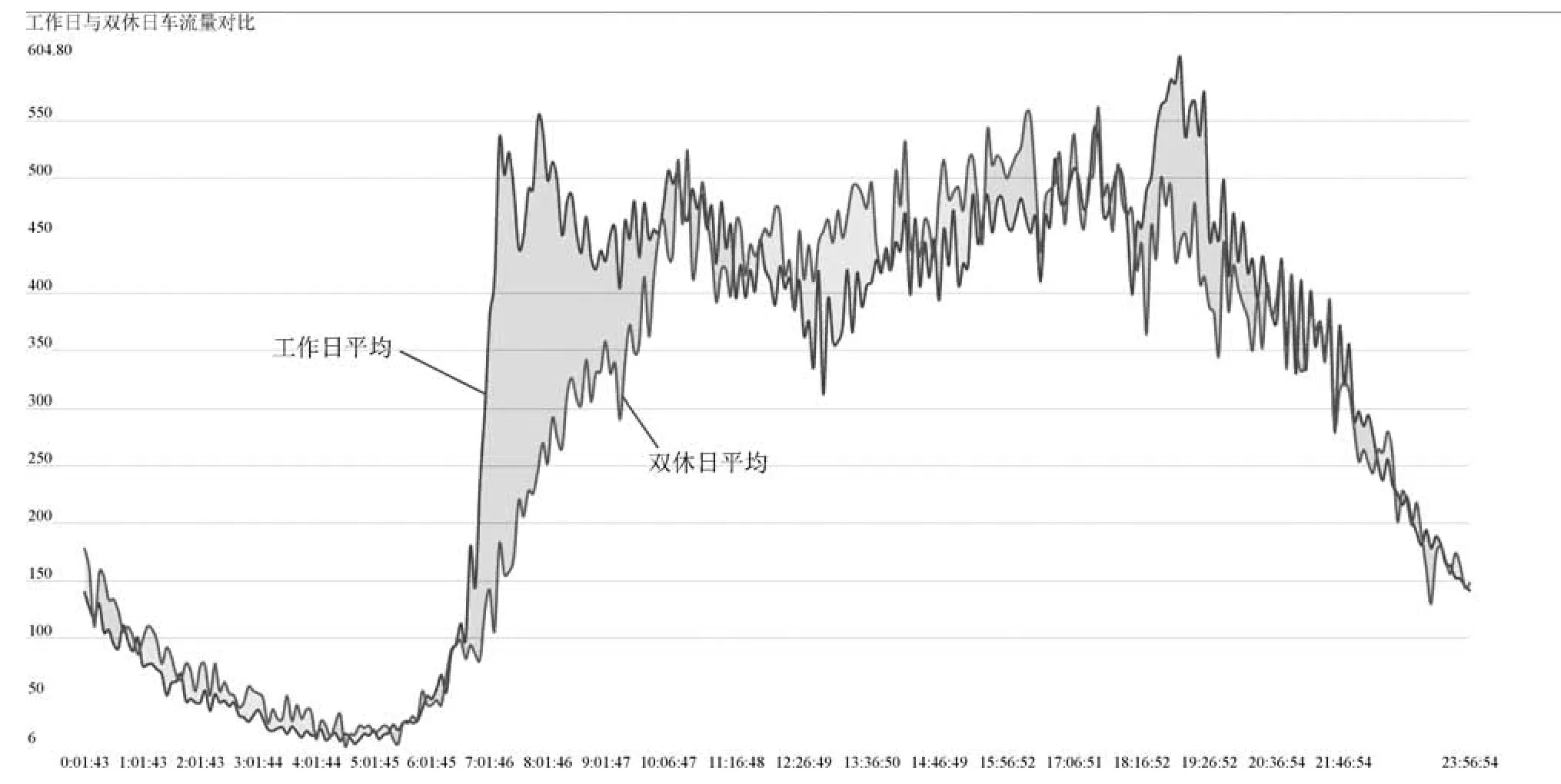
圖7 工作日與雙休日車流量對比Fig.7 Comparison of traきc fl ow between workdays and weekends

這樣就得到工作日路口相位周期的語言動力學軌跡.
同理,雙休日如圖可得,早高峰稍有延后,且晚高峰稍有提前.凌晨1:30~6:00同樣設置為黃燈閃爍的警示信號,其余時間段內可得新的語言動力學軌跡為

4.2 各相位配時的語言動力學分析
設右轉車輛以禮讓行人為前提不受紅綠燈限制.相位設置如圖3所示:南北直行為相位一(P1),南向北左轉為相位二(P2),西向東左轉為相位三(P3).以各相位在指定周期內檢測到的最大排隊長度為輸入Li(i=1,2,3),經模糊化后輸入模糊控制器,根據前文所述模糊規則,經過模糊推理計算各相位所占論域的百分比,得到對應相位時長為

輸入、輸出的隸屬度函數分別設置如圖8所示.
本文選取某個工作日中的三個時間點,將檢測的車流數據由模糊控制器,通過模糊集合的詞計算和匹配度法計算得到配時方案(算法流程圖如圖9).
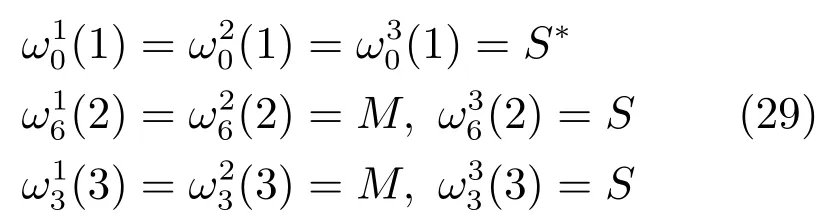
經過實地考察,檢測到該路口凌晨0:30(t1)分左右的各相位周期內車隊長度均在10m以下,設下一相位周期為?0(1),各相位ω10(1)=ω20(1)=ω30(1)=S?,因此

上午7:50(t2)時測得相位各車道的平均排隊長度 (即相序優先級) 為 L1(t2)=150m,L2(t2)=130m,L3(t2)=100m,由對應配時模糊規則庫,激活1條模糊規則,得:

經過模糊推理與詞計算,可得決策論域為?6(2),對于各相位的決策時間所占論域百分比Qi,可得Q1%(2)=Q2%(2)=50%,Q3%(2)=25%,故下一周期的通行相序為P1,P2,P3,各相位的通行時間為

中午1:30(t3)時,測得L1(t3)=70m,L2(t3)=80m,L3(t3)=40m,經模糊化、模糊推理可得周期為?3(3),各相位配時分別為

經計算可得該時刻下一周期的通行相序為P2,P1,P3,各相位通行時長為

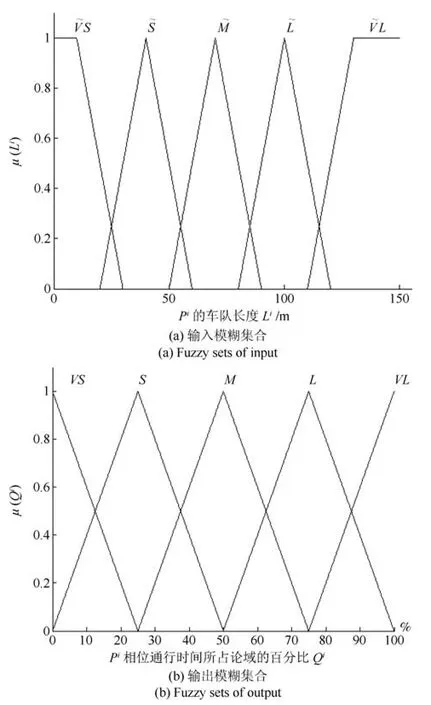
圖8 輸入、輸出模糊集合Fig.8 fuzzy sets of input and output
因此,該路口在不同時刻各相位配時的語言動力學軌跡表示如下:
5 結論與展望
本文針對交叉路口信號配時不合理的現象,提出了一種基于ACP的平行控制方案,以實時車流數據為輸入,以相位周期為波動型的連通時變論域,通過設定時變論域上的模糊集合及模糊規則,給出紅綠燈平行管理控制策略,根據實時車流數據調整各相位配時,通過對三叉路口交通流數據實時計算出對應的配時周期及相位時長.在同一天的不同時段內,當車流量發生變化時,配時周期及各相位時長也發生改變,形成交叉路口各相位動態配時方案,得到對應的語言動力學軌跡.
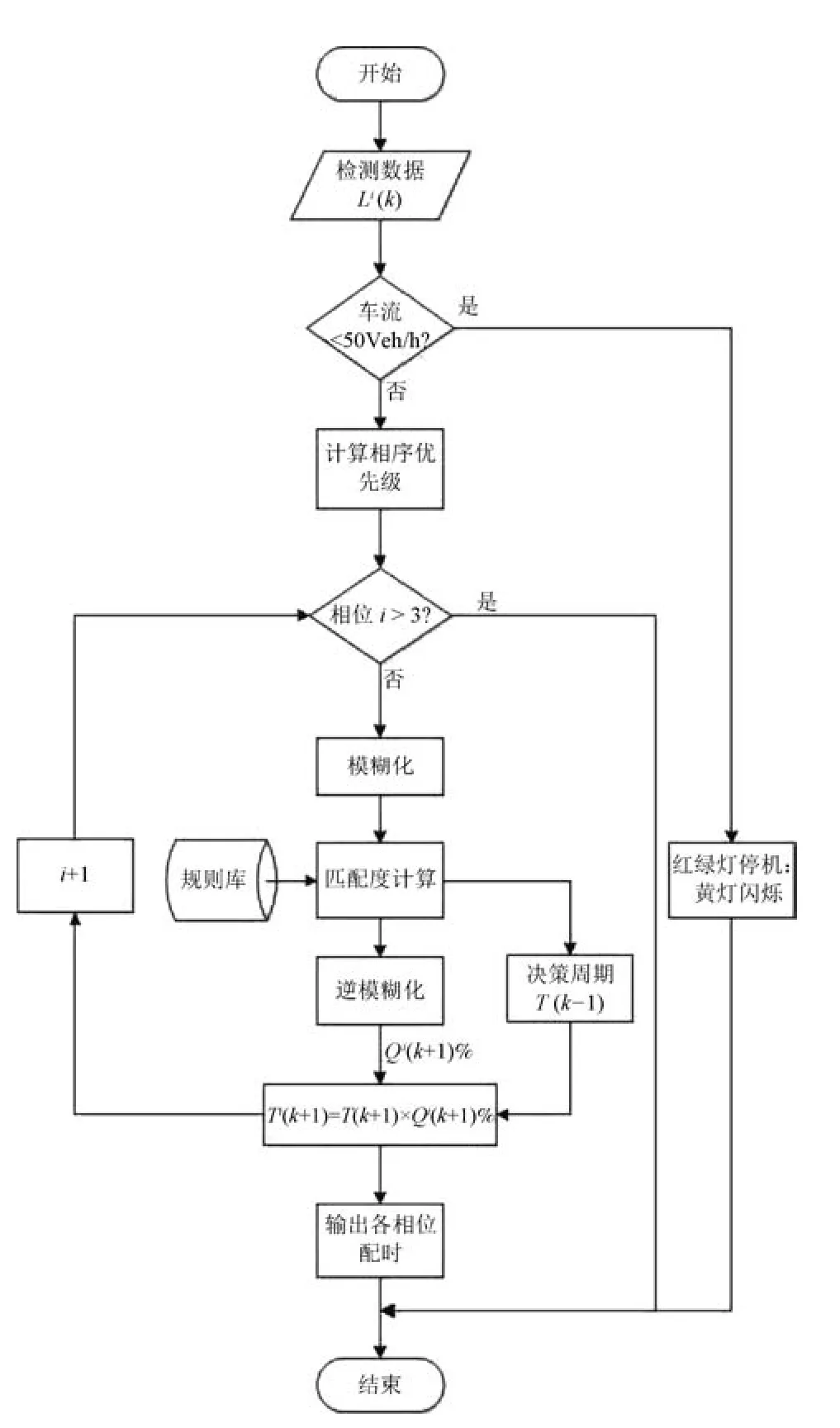
圖9 算法流程圖Fig.9 Flow chart of the algorithm
本文主要針對T型路口的平行紅綠燈配時展開探討,對于大型交叉路口行人流、非機動車流及機動車流的三元混合交通流中,如何確定與交通流狀況相一致的平行紅綠燈配時周期及相位時長是未來的平行交通系統研究的一項重要工作.
1 Zhou J,Chen C L Philip,Chen L,Zhao W.A usercustomizable urban traきc information collection method based on wireless sensor networks.IEEE Transactions on Intelligent Transportation Systems,2013,14(3):1119?1128
2 Zhou J,Chen C L Philip,Chen L,Li H X.A collaborative fuzzy clustering algorithm in distributed network environments.IEEE Transactions on Fuzzy Systems,2014,22(6):1443?1456
3 Zhang J P,Wang F Y,Wang K F,Lin W H,Xu X,Chen C.Data-driven intelligent transportation systems:a survey.IEEE Transactions on Intelligent Transportation Systems,2011,12(4):1624?1639
4 Zhai Gao-Shou,Cha Jian-Zhong,E Ming-Cheng.The architecture of integrated intelligent urban traきc control system.System Engineering-Theory&Practice,2000,20(7):80?84(翟高壽,查建中,鄂明成.集成智能城市交通控制系統體系結構的提出.系統工程理論與實踐,2000,20(7):80?84)
5 Li Sheng-Chun,Kong Ling-Jiang,Liu Mu-Ren,Zheng Rong-Sen.The eあects of intelligent traきc light on the crossing traきc fl ow.Acta Physica Sinica,2009,58(4):2266?2270(李盛春,孔令江,劉慕仁,鄭容森.智能交通燈對交叉路口交通流的影響.物理學報,2009,58(4):2266?2270)
6 Pappis C P,Mamdani E H.A fuzzy logic controller for a traきc junction.IEEE Transactions on Systems,Man,and Cybernetics,1977,7(10):707?717
7 Niittymaki J,Kosonen T,Nevala R.Fuzzy traきc signal control in major arterials.In:Proceedings of the 2001 IEEE Intelligent Transportation Systems.Oakland,CA,USA:IEEE,2001.520?531
8 Bi Y R,Srinivasan D,Lu X B,Sun Z,Zeng W L.Type-2 fuzzy multi-intersection traきc signal control with diあerential evolution optimization.Expert Systems with Applications,2014,41(16):7338?7349
9 Balaji P G,Srinivasan D.Distributed multi-agent type-2 fuzzy architecture for urban traきc signal control.In:Proceedings of the 2009 IEEE International Conference on Fuzzy Systems.Jeju Island,South Korea:IEEE,2009.1627?1632
10 Balaji P,Srinivasan D.Type-2 fuzzy logic based urban traffi c management.Engineering Applications of Arti fi cial Intelligence,2011,24(1):12?22
11 Collotta M,Bello L L,Pau G.A novel approach for dynamic traきc lights management based on Wireless Sensor Networks and multiple fuzzy logic controllers.Expert Systems with Applications,2015,42(13):5403?5415
12 Abbas M K,Karsiti M N,Napiah M,Samir B B,Al-Jemeli M.High accuracy traきc light controller for increasing the given green time utilization.Computers and Electrical Engineering,2015,41:40?51
13 Chen Hong,Chen Sen-Fa.A method for real time traきc fuzzy control of a single intersection.Information and Control,1997,26(3):227?233(陳洪,陳森發.單路口交通實時模糊控制的一種方法.信息與控制,1997,26(3):227?233)
14 Li L,Lv Y S,Wang F Y.Traきc signal timing via deep reinforcement learning.IEEE/CAA Journal of Automatica Sinica,2016,3(3):247?254
15 Li L,Wen D.Parallel Systems for traきc control:a rethinking.IEEE Transactions on Intelligent Transportation Systems,2016,17(4):1179?1182
16 Abdi J,Moshiri B,Abdulhai B,Sedigh A K.Forecasting of short-term traきc- fl ow based on improved neurofuzzy models via emotional temporal diあerence learning algorithm.Engineering Applications of Arti fi cial Intelligence,2012,25(5):1022?1042
17 Abdi J,Moshiri B,Abdulhai B,Sedigh A K.Short-term traきc fl ow forecasting:parametric and nonparametric approaches via emotional temporal diあerence learning.Neural Computing and Applications,2013,23(1):141?159
18 Cong Dong-Dong,Wang Zhen-Jia.Intelligent traきc light control system of the urban transportation based on FNNC.Control Engineering of China,2003,10(S):14?17(叢冬棟,王振家.基于FNNC的城市交通智能紅綠燈控制系統.控制工程,2003,10(S):14?17)
19 Bretherton D,Bodger M,Cowling J.SCOOT-managing congestion,control and communications.Traきc Engineering&Control,2006,47(3):88?92
20 Wiering M,van Veenen J,Vreeken J,Koopman A.Intelligent Traきc Light Control,UU-CS-2004?029,Institute of Information and Computing Sciences,Utrecht University,Utrecht,Netherlands,2004.
21 Box S,Waterson B.An automated signalized junction controller that learns strategies from a human expert.Engineering Applications of Arti fi cial Intelligence,2012,25(1):107?118
22 Box S,Waterson B.An automated signalized junction controller that learns strategies by temporal diあerence reinforcement learning.Engineering Applications of Arti fi cial Intelligence,2013,26(1):652?659
23 Liu Qi-Zhong,Li Bing.The optimization control for regional traきc signal based on improved genetic algorithm.Journal of Xihua University(Nature Science),2014,33(6):48?52(劉臍鍾,李兵.基于改進遺傳算法的區域交通信號優化控制.西華大學學報(自然科學版),2014,33(6):48?52)
24 Bingham E.Reinforcement learning in neurofuzzy traきc signal control.European Journal of Operational Research,2001,131(2):232?241
25 Wang Fei-Yue.Parallel control:a method for data-driven and computational control.Acta Automatica Sinica,2013,39(4):293?302(王飛躍.平行控制:數據驅動的計算控制方法.自動化學報,2013,39(4):293?302)
26 Wang Fei-Yue.Parallel system methods for management and control of complex systems.Control and Decision,2004,19(5):485?489,514(王飛躍.平行系統方法與復雜系統的管理和控制.控制與決策,2004,19(5):485?489,514)
27 Wang F Y.Parallel control and management for intelligent transportation systems:concepts,architectures,and applications.IEEE Transactions on Intelligent Transportation Systems,2010,11(3):630?638
28 Mo Hong.Linguistic dynamic orbits in the time varying universe of discourse.Acta Automatica Sinica,2012,38(10):1585?1594(莫紅.時變論域下的語言動力學軌跡.自動化學報,2012,38(10):1585?1594)
29 Wang Fei-Yue.Fundamental issues in research of computing with words and linguistic dynamic system.Acta Automatica Sinica,2005,31(6):844?852(王飛躍.詞計算和語言動力學系統的基本問題和研究.自動化學報,2005,31(6):844?852)
30 Zadeh L A.Fuzzy sets.Information and Control,1965,8(3):338?353
31 Ning Bin,Wang Fei-Yue,Dong Hai-Rong,Li Run-Mei,Wen Ding,Li Li.Parallel systems for urban rail transportation based on ACP approach.Journal of Transportation Systems Engineering and Information Technology,2010,10(6):22?28(寧濱,王飛躍,董海榮,李潤梅,文丁,李莉.基于ACP方法的城市軌道交通平行系統體系研究.交通運輸系統工程與信息,2010,10(6):22?28)
Linguistic Dynamic Analysis of Traきc Light Timing Design within the Time-varying Universe
MO Hong1HAO Xue-Xin1
Urban traきc fl ow always changes sharply at diあerent moments.A dynamic timing design model adapting to the change of traきc fl ow may alleviate traきc congestion and reduce the waiting time of travelers.In this paper,a new method for traきc light control is presented by synthesizing time-varying universe,parallel control and linguistic dynamic systems(LDS).In the method,the time-varying universe is constructed by the series of cyclic lengths of traきc lights at diあerent times,and the corresponding traきc sequences and durations are decided by their respective phase queue lengths,thus a timing scheme based on time-varying universe is obtained.By this timing scheme,a dynamic fuzzy rule base is formed to adjust the cyclic length and constituent sequence light time dynamically.At the same time the dynamic fuzzy rule base which is driven by real time traきc data adjusts the traきc sequence and duration.Then the linguistic dynamic orbits of time-design for traきc light are analyzed within the time-varying universe.Finally,an example is given to verify the validity of this method.
Traきc light timing design,time-varying universe,fuzzy logic,linguistic dynamic system(LDS)
Mo Hong,Hao Xue-Xin.Linguistic dynamic analysis of traきc light timing design within the time-varying universe.Acta Automatica Sinica,2017,43(12):2202?2212
2016-05-18 錄用日期2017-06-22
May 18,2016;accepted June 22,2017
國家自然科學基金(61473048,61074093,61233008),長沙理工大學青年英才計劃資助
Supported by National Natural Science Foundation of China(61473048,61074093,61233008),Youth Talent Support Plan of Changsha University of Science and Technology
本文責任編委徐昕
Recommended by Associate Editor XU Xin
1.長沙理工大學電氣與信息工程學院長沙410114
1.School of Electric and Information Engineering,Changsha University of Science and Technology,Changsha 410114
莫紅,郝學新.時變論域下紅綠燈配時的語言動力學分析.自動化學報,2017,43(12):2202?2212
DOI10.16383/j.aas.2017.c160406

莫 紅 長沙理工大學電氣與信息工程學院教授.2004年獲得中國科學院研究生院工學博士學位.主要研究方向為語言動力系統與智能計算.本文通信作者.
E-mail:mohong198@163.com
(MO Hong Professor at the School of Electric and Information Engineering,Changsha University of Science and Technology.She received her Ph.D.degree from Chinese Academy of Sciences in 2004.Her research interest covers linguistic dynamic systems and intelligent computing.Corresponding author of this paper.)

郝學新 長沙理工大學電氣與信息工程學院研究生.主要研究方向為語言動力系統與智能交通系統.
E-mail:mohong198@163.com
(HAO Xue-Xin Master student at the School of Electric and Information Engineering,Changsha University of Science and Technology.His research interest covers linguistic dynamic systems and intelligent transportation systems.)
猜你喜歡
中華詩詞(2023年8期)2023-02-06 08:51:28
文苑(2020年4期)2020-05-30 12:35:30
小學生作文(中高年級適用)(2018年3期)2018-04-18 01:24:47
瘋狂英語·新策略(2017年8期)2017-05-31 08:13:46
華北電力大學學報(社會科學版)(2016年4期)2016-12-01 03:59:30
新聞傳播(2016年10期)2016-09-26 12:15:04
玉溪師范學院學報(2015年1期)2015-08-22 02:51:58
少兒科學周刊·少年版(2015年4期)2015-07-07 21:11:17
語文知識(2014年10期)2014-02-28 22:00:56
中學生英語高中綜合天地(2009年10期)2009-12-29 00:00:00
