基于L-M算法的反向傳播網絡的濕度傳感器輸出誤差補償研究
2018-01-05 01:01:41李慶超
計算機測量與控制 2017年12期
關鍵詞:測量
梁 杰,晏 天,李慶超
(國家海洋局 南海標準計量中心,廣州 510000)
基于L-M算法的反向傳播網絡的濕度傳感器輸出誤差補償研究
梁 杰,晏 天,李慶超
(國家海洋局 南海標準計量中心,廣州 510000)
針對濕度傳感器的輸出非線性問題,提出了基于L-M算法建立BP神經網絡進行補償校正,實現電阻型濕度傳感器的輸入與輸出非線性補償,并與共軛梯度算法、擬牛頓算法所建立的神經網路模型進行對比,重點比較了模型迭代性能、標準偏差;最后發現當神經網絡用L-M算法進行訓練模擬時在迭代性能、標準偏差等方面具有更優異的表現,更適合濕度傳感器的非線性特性的補償校正。
濕度傳感器;誤差補償;反向傳播網絡;共軛梯度算法;擬牛頓算法;L-M算法
0 引言
相對濕度是空氣中的水蒸汽量與使空氣在當前溫度下飽和所需的水蒸氣量之比。相對濕度傳感器是目前使用最廣的測量濕度的儀器。濕度傳感器可用于通風和空調系統、醫療設備、農業、供暖、汽車和半導體、建筑物生活環境智能控制等領域。對于人體,環境相對濕度應在40%~70%RH之間,低于這個范圍人體會感覺干燥,高于這個范圍則會感覺潮濕,低于或高于此范圍的相對濕度會導致人體不適以及諸多健康問題,例如唇裂,鼻出血和喉嚨干燥。 因此,濕度傳感器在日常生活中非常重要。
濕度傳感器是濕度測量儀器的核心部件,由于濕度傳感器是由濕敏電阻或濕敏電容所構成,隨著使用時間的增加其部件會自然產生老化,原有的出廠時的溫度補償不再適用,并且出廠時的濕度傳感器輸出補償校正是對幾個固定點經行修正,但是在實際使用中往往需要對濕度進行連續的測量,無法對其輸出值的非線性誤差進行補償[1-3]。介于目前傳統的濕度傳感器校正的弊端,本文提出了一種新型的補償校正方案,即利用神經網絡的逼近和預測功能對其進行非線性誤差補償。通過對比傳統的共軛梯度算法、擬牛頓算法和L-M算法篩選出最適合的一種算法作為補償模型的建模基礎,以更好的實現非線性誤差補償。
1 補償原理
本文選用Honeywell公司的HIH3602-A型濕度傳感器作為研究對象,其核心部件是陶瓷濕敏電阻,此類電阻的阻值不僅受濕度的影響,更受傳感器所處的環境溫度影響,隨著環境溫度改變和使用時間增加,其阻值會產生漂移導致測量準確度隨時間下降[2-4]。
1.1 補償原理模型
傳統的濕度傳感器補償方式分為兩種,第一種是硬件補償,硬件補償是在傳感器的輸出端采用硬件電路來減小溫度、自然老化等環境因素的影響,但是硬件補償不能完全消除這些因素導致的測量值的偏差,而且新的硬件電路的加入增加了系統的復雜性導致穩定性變差,此外,補償電路也面臨著與傳感器本身相同的問題,即電路老化,而且硬件補償結構固定,采用后很難對其進行改造;第二種是軟件補償,軟件補償是在傳感器向顯示終端輸出測量值時對其讀數進行軟件修正,這對傳感器自身的結構無任何影響,而且軟件補償可以根據實際情況調節參數,移植性和可重復性是硬件補償無法相比的。
目前,傳感器輸出軟件補償最常采用的方法是最小二乘法擬合修正曲線,即實際測量值與標準值進行擬合,形成新的輸出曲線,最后得出新的修正因子,但是最小二乘法只能在線性輸出中應用,在非線性輸出中曲線階數過小無法反映實際輸出,過大則會產生過擬合,對后面的測量值預測性變差,因此,最小二乘法擬合修正曲線在非線性輸出修正中很少采用;神經網絡修正技術在處理非線性復雜系統的修正補償具有獨特優勢,神經網絡是將大量的訓練樣本輸入,對網絡進行訓練,從而調整每個神經元的權值和閾值,使輸出值和標準值逐漸逼近,直至滿足準確度要求,神經網絡在處理非線性問題時是其他方法無法比擬的。在本文中采用神經網絡的方法對傳感器輸出進行補償,補償原理模型由傳感器測量模型和神經網絡模型兩部分組成。傳感器測量模型部分主要是傳感器感知外部的物理參量,對感知的物理參量通過電壓、電流等方式進行輸出,并通過AD轉換對其進行數值化;神經網絡補償部分主要是在PC等終端運行的補償軟件,功能是對獲得的經過數值化的物理參量進行在線修正,以彌補硬件測量電路的不足。
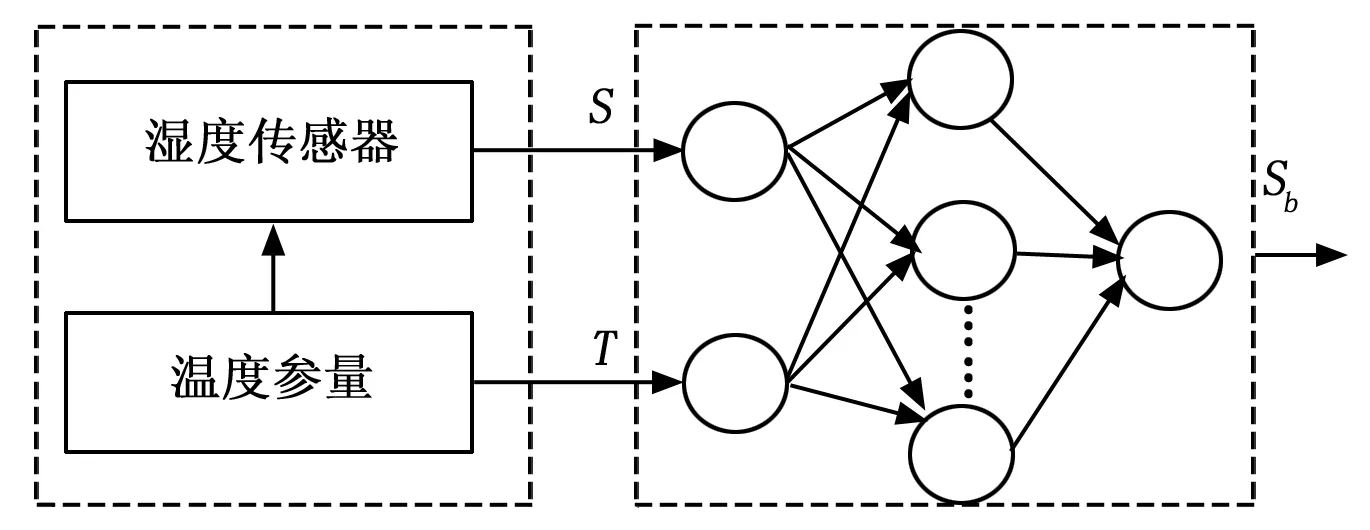
圖1 傳感器溫度補償原理圖
根據實驗數據,溫度對濕度傳感器的輸出特性的影響是非線性的,在此,我們利用BP神經網絡的逼近特性對非線性函數關系不斷進行映射,并以此思路建立逆向的數學模型,確保神經網絡的輸出誤差值在一定限度內,使濕度傳感器的輸出滿足實際要求[5-6]。
濕敏傳感器測濕過程中受到溫度的影響可定義為函數(1),
S=f(Sb,T)
(1)
T為溫度參數;S為傳感器輸出;Sb為濕度參數。
逆模型函數為:
Sb=kf-1(S,T)
(2)
其中:k為常數(由于輸出補償校正是在系統放大增益后執行的,所以k為常數1)。這里S和T為輸出Sb的單值函數,Sb為濕度傳感器的期望輸出量,即標準量,T為濕度傳感器的濕敏元件的環境參量。在網絡中,將Sb和T作為網絡的輸入端,S為網絡的輸出端,通過自適應網絡處理后的輸出S就是消除了溫度干擾量后的目標參量。根據實驗所得的實驗數據,進行網絡訓練,最后得出的輸出量S經過函數擬合,擬合后得出的曲線就是修正后的理想輸出。
1.2 BP網絡及L-M算法
BP網絡其逼近能力對濕度傳感器的輸出和輸入關系的逆向建模可起到關鍵作用。BP神經網絡是由輸入層、隱層以及輸出層等3層神經元構成,輸入層是由多個輸入節點構成是整個神經網絡的數據輸入端,隱層是對數據輸入端輸入的數據進行處理,輸出層是對隱層處理過的數據進行輸出,在輸入層每個輸入節點通過加權的方式進行求和,最后與隱層的閾值相比較,如果二者的誤差大于預先設定的目標,輸入層調整每個節點的權值繼續進行計算,直到加權和與閾值的誤差小于預先設定,則網絡的訓練目標達成,輸出層神經元節點的函數模型為:
(3)
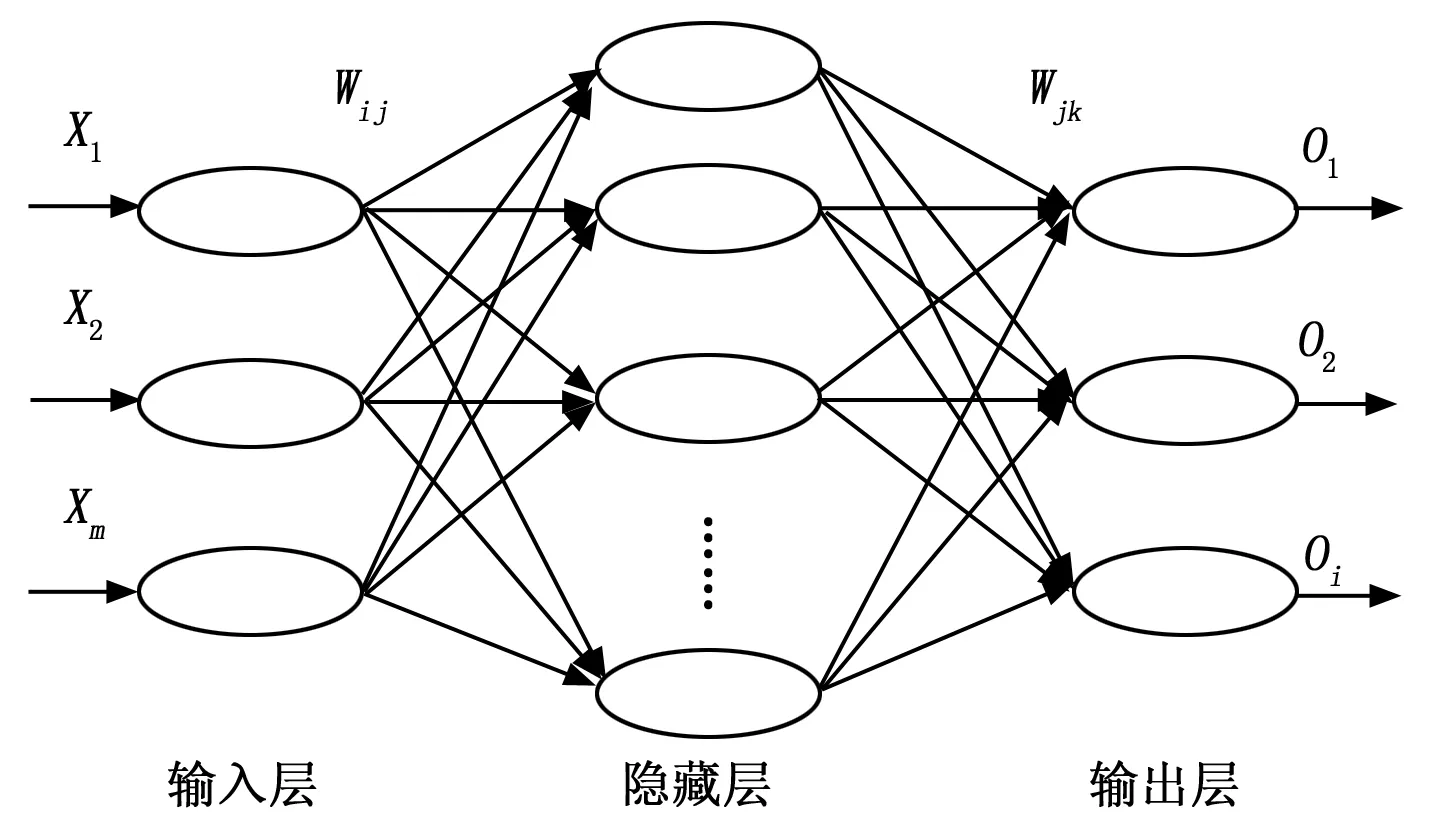
圖2 BP神經網絡結構圖
BP神經網絡是按照梯度的逆方向改變偏差和權值,即沿著最快減小函數誤差的方向,迭代公式為:
xk+1=xk-akεk
(4)
式中,xk+1為網絡前向運算中迭代產生的偏差和權值,xk為網絡前向運算當前的偏差和權值,εk為隱層函數的梯度,ak為神經網絡的學習效率。xk隨著訓練迭代次數的增加是不斷變化的,變化的趨勢是不斷變小,向預設值收斂,εk是控制網絡逼近的方向,ak是控制逼近的速度,當ak過大時會導致在收斂點來回震蕩,而不能完成收斂過程,過小則導致出現極值,魯棒性較差,抗干擾能力弱,所以在進行網絡訓練時合適的ak取值對整個網絡的性能優劣非常重要,一般在(0.1~0.5)之間,BP神經網絡的前向傳播的計算公式為(5):
(5)
網絡輸出公式為:
(6)
因此誤差公式為:
(7)
L-M算法是一種新型的算法,它主要是依靠標準數值優化技術來解決實際問題,與傳統的神經網絡算法相比利,它拋棄了均方誤差進而用平方誤差進行計算,他的訓練和收斂速度快于其他算法,L-M算法在解決非線性問題上效率較高[7-10]。其平方誤差公式為:
(8)
E為網絡輸出誤差的平方和,okj為網絡輸出層的第k個神經元節點的實際輸出,dkj為補償網絡的期望輸出值。
2 實驗設計
2.1 樣本獲取
利用BP網絡實現對濕度傳感器的非線性補償,需要大量的學習訓練樣本,訓練樣本的獲取是通過改變溫度T,在不同

表1 神經網絡訓練樣本
的標準濕度下測量實際濕度輸出而得到,以此樣本集作為神經網絡的輸入和輸出,最后經過上述樣本集訓練的神經網絡來實現濕度傳感器非線性補償。
本文中的訓練樣本是通過具體實驗獲得的,訓練樣本是在以下條件測量的:溫濕環境是通過富奇調溫調濕箱控制,相對濕度調節范圍為(10~100)%,溫度調節范圍(-70~60)℃,輸出信號是通過JJQ1型信號模擬器讀取,標準濕度傳感器為HMP45D(該儀器經過社會一級標準校準)。為了減小隨機誤差,每個測量點每隔5分鐘讀取一次數據,共讀取10次,10次讀取數據的平均值作為該點的未修正值,共測得50組未修正輸出值,將這50組數據分為三類,第一類共40組,作為訓練神經網絡的訓練樣本,來對新的神經網絡進行訓練;第二類共5組,這5組的溫度值是固定的,濕度值是不同的,用來驗證神經網絡在固定溫度下不同濕度值的補償校正效果;第三類共5組,在這5組中濕度是固定的,溫度可變,用來驗證網絡在溫度變化的情況下對濕度的補償效果。
表1是實驗得到的訓練樣本集,其中T為實驗溫度,Sb為標準濕度,由經過校準的標準濕度計測得,S為待校準濕度傳感器實測濕度,訓練過程中,樣本選取按照[TSSb]進行,輸入訓練集為[TS],用來作為神經網絡的輸入層的輸入數據,輸出訓練集為[Sb]。
2.2 網絡模型訓練
根據輸入和輸出數據特性,為了便于對原始數據訓練,加快其收斂速度,需要在輸入網絡對網絡訓練前進行歸一化處理,隱含層選取Tansig函數作為傳遞函數,輸出選取線性激勵函數Purelin,隱層節點個的計算沒有固定的計算公式,可以根據經驗公式(10)進行計算得出。
(10)
n為網絡輸入層節點個數,m為網絡隱層節點個數,l為網絡輸出層節點個數,a為可以根據情況調節的常數(1~10)。經過對a在不同的取值情況下的網絡訓練,隱層節點的個數設為6時網絡收斂和誤差性能最好。最終形成的神經網絡結構為輸入層2個節點,隱層6個節點,輸出層1個節點,網絡結構為net=(2,6,1)。實驗中采用40組實驗獲得的數據作為訓練樣本,溫度為51.21℃的5個實驗樣本和標準濕度為96%RH的5個實驗樣本作為測試驗證樣本,網絡經過訓練后使用以上驗證樣本對其進行性能分析,并做誤差統計。網絡訓練的具體步驟如下:
1)對神經網的各個節點的閾值和權值進行初始化,選取實驗得到的數據作為輸入的樣本;
2)對40組用于訓練網路的樣本進行歸一化處理,經過歸一化后的值分布于(-1,1)范圍內;
3)按照數據獲得的順序,輸入經過歸一化處理的40組樣本;
4)根據需要,預先初始化期望誤差值,matlab調用nntool網絡工具箱對網絡進行訓練,并自動計算神經網絡模型的輸出標準偏差值,如果達到預先設定值,網絡停止迭代,網絡訓練完成。
2.3 網絡訓練結果對比
在此我們使用matlab的網絡工具箱nntool對設計的神經網絡進行訓練,訓練過程中分別改變隱層的傳遞函數來對比三個算法在訓練速度和訓練準確度上的優劣,最后確定使用那種算法更適合對傳感器進行修正補償。補償模型以L-M算法為基礎,并與傳統的用于函數擬合的共軛梯度算法、擬牛頓算法經行比較,分別用以上三種方法對神經網絡進行訓練,最后根據結果對各算法的性能進行分析,以確定那種算法被選用。
1)共軛梯度算法:在本算法中,由于共軛梯度算法的梯度值選擇過大,導致訓練提前結束,并未達到預先設定的誤差值,當然可以通過減小梯度值來使其能夠達到預定的準確度,但是其收斂速度會大大增加,圖3為matlab使用網絡工具箱訓練的結果,訓練次數為3300次,mse為5.0721e-07,仿真結果如圖3所示。

圖3 共軛梯度算法誤差性能分析
2)擬牛頓算法:在這個算法中網絡精度達到了預先設定值,但是在訓練過程中,波動較大,容易在收斂過程中產生過擬合,導致在設定點來回波動,無法精確計算其穩定性,最后在反演時導致修正后的測量值不確定度較大,圖4是其訓練后的結果,訓練次數158次,mse為9.8632e-08, 仿真結果如圖4所示。

圖4 擬牛頓算法誤差性能分析
3)L-M算法:本算法無論在收斂速度還是精度都優于前兩種算法,而且其波動較小,可以精確的收斂在預設點,最后經過反演出的實際測量值不確定度較小,精度較高。訓練次數為34次,mse為9.7577e-08,仿真結果如圖5所示。

圖5 L-M算法誤差性能分析
綜合以上,經過仿真對比,L-M算法在收斂速度和輸出誤差性能上優于共軛梯度算法和擬牛頓算法,他不但在收斂速度和收斂精度上占優,更重要的是在收斂過程中其波動性較小,魯棒性較好,有較強的抗干擾能力,適合作為傳感器補償的算法。因此,濕度傳感器的補償校正選用L-M算法作為網絡模型的建模基礎。
3 實驗結果與分析
由于濕度傳感器內的濕敏電阻不但對濕度敏感,溫度對其阻值也會有影響,所以要對其分別經行實驗和分析,濕度傳感器輸出補償校正分以下兩種情況:
1)由實驗數據可知,在溫度固定時隨著濕度增加,濕度傳感器的輸出值也增加,但是測量值與標準濕度計的測量值誤差也在不斷增大,因此其輸出誤差呈現非線性。在實際使用中有必要對需要的某一個固定點溫度的濕度進行修正補償,在試驗中L-M算法進過訓練達到預設的預測輸出的最小值,選擇某一固定溫度點(以51.21℃為例)的5組數據經行驗證,把這5組數據經過歸一化處理后輸入神經網絡對輸出進行預測,預測結果即為補償后的輸出,預測輸出結果見表2和圖6。

表2 51.21℃時5組不同濕度點測試樣本非線性補償結果

圖6 51.21℃時5組不同濕度點測試樣本相對誤差
對表2進行分析可知,在同一固定溫度51.21℃下,濕度傳感器未進行輸出補償時最大相對誤差為-15.4%,無法滿足國家檢定規程±5%的標準要求,而經本文方法補償后,最大相對誤差為1.4%,很大程度上減小了輸出誤差,圖6是補償前和補償后相對誤差。由此可見本文方法在溫度固定情況下對濕度傳感器不同濕度值的補償是有效的。
2)不同的溫度會導致濕敏電阻在不同溫度點有不同的阻值,由實驗數據可知,溫度對濕敏電阻的阻值影響是非線性的,即在同一個標準濕度環境中,由于溫度的不同,濕度傳感器的示值也會發生變化,在PC端通過matlab中的神經網絡工具箱運行經過訓練的神經網絡,L-M算法經過訓練達到預設的預測輸出的最小值時,選擇5組某一固定標準濕度(以96%RH左右為例)在不同溫度下的實測值數據經行測試驗證,將選取的樣本進行歸一化處理后,輸入神經網絡進行預測,預測結果即為補償后的輸出,結果見表3和圖7。
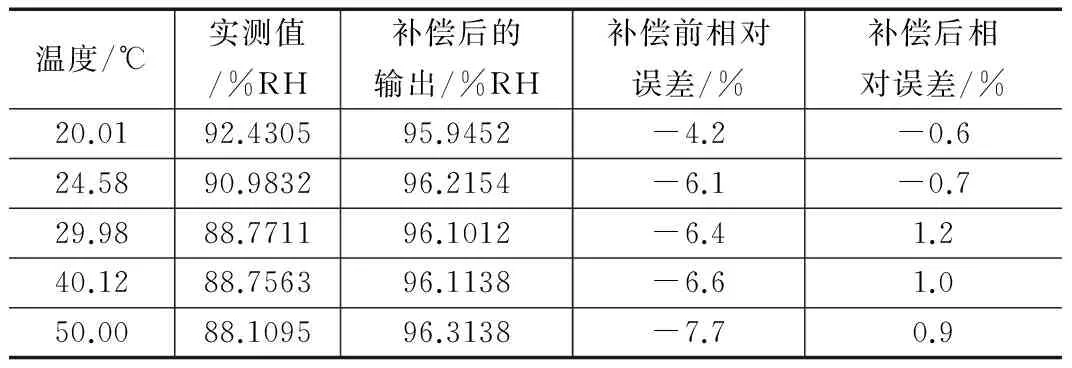
表3 96%RH時5組不同溫度點測試樣本非線性補償結果

圖7 96%RH時5組不同溫度點測試樣本相對誤差
從表3可以看出,同一標準濕度96%RH下,未進行溫度補償時傳感器的輸出最大相對誤差為-7.7%,國家濕度檢定規程要求±7%RH(標準濕度40%RH以下或70%RH以上),經過本文的方法補償修正后最大相對誤差為1.2%,圖7是同一標準濕度點不同溫度下補償后的相對誤差,與補償修正前相比,傳感器的輸出準確度有很大的提升。
綜合(1)和(2)兩種情況,根據補償前后的傳感器輸出特性曲線進行比較如圖6和圖7,可以看出,經過補償后精度遠高于補償前,實驗仿真結果表明,傳感器經過基于L-M算法的BP神經網絡補償后,輸出更接近濕度標準值,說明該方法較準確的實現了濕度傳感器的非線性補償校正,達到了預期目標。
4 結束語
本文提出了濕度傳感器補償模型,針對其本身的輸出非線性特性和由于溫度的影響導致的非線性輸出特性而引入補償環節,利用L-M算法、擬牛頓算法、共軛梯度算法等3種算法
的BP神經網絡經行仿真驗證,結果表明以L-M算法為基礎的BP神經網絡對濕度傳感器輸出進行補償時效果最為優異,補償校正后誤差不大于1.4%,濕度傳感器的準確度有了顯著的提高,滿足了實際使用的需要,本文基于神經網絡的傳感器非線性補償為傳感器的校準提供了新的設計思路。
[1] 王 悅,葉海明.LabWindows/CVI下基于BP神經網絡的溫度補償虛擬濕度測量系統設計[J].國外電子測量技術,2010,29(1):36-38.
[2] Wang X D, Ye M Y.Hysteresis and nonlinearity compensation of relative humidity sensor using support vector machines[J].Sensors and ActuatorsB:chemical,2008,129(1)274-284.
[3] 俞阿龍.基于RBF神經網絡的熱敏電阻溫度傳感器非線性補償方法[J].儀器儀表學報,2007,28(5):899-903.
[4] 孫文良,沈秋宇.HMP45D溫濕度傳感器的檢定校準 [J].氣象水文海洋儀器,2009(3):124-126.
[5] 周勝海.傳感器非線性的硬件校正方法 [J].儀表技術與傳感器,2002,21(5):1-4.
[6] 陳俊杰,盧 俊,黃唯一.基于遺傳神經網絡的傳感器系統的非線性校正[J].儀器儀表學報,2003,24(2):201-204.
[7] 司端鋒,常炳國,劉君華.基于BP神經網絡的傳感器特性補償新算法的研究[J].儀表技術與傳感器,2000(1):11-14.
[8] 顧 磊,黃慶安,秦 明.一種新型CMOS兼容濕度傳感器[J].半導體學報,2004,25(2):174-178.
[9] 盧智遠,周永軍.傳感器非線性誤差校正的BP神經網絡方法研究[J].傳感器技術,2005,24(2):11-12.
[10] 劉 濤,王 華.傳感器非線性校正的遺傳支持向量機方法[J].電子測量與儀器學報,2011,25(1):56-60.
Research on Output error Compensation of Humidity Sensor Based on L-M Algorithm and BP Neural Network
Liang Jie,Yan Tian,Li Qingchao
(South China Sea Standard Metrology Center,Guangzhou 510000,China)
Aiming at the nonlinear output of humidity sensor, a nonlinear compensation scheme based on BP neural network is proposed. BP neural network is established based on L-M algorithm, and the input and output nonlinear compensation correction of the resistance humidity sensor is realized, Compared with the conjugate gradient algorithm and the BP neural network model proposed by the quasi Newton algorithm, the model error performance and convergence speed are compared. The results show that the BP neural network model based on L-M algorithm has more efficient performance in convergence speed, error performance and so on, its compensation correction is more suitable for nonlinear characteristics of humidity sensors.
humidity sensor;error compensation;Back propagation network;conjugate gradient algorithms;bfgs;levenberg-marquardt algorithm
2017-05-18;
2017-06-08。
國家海洋局南海分局局長基金(1637)。
梁 杰(1985-),男,碩士研究生,工程師,主要從事海洋計量,氣體分析,粘度與密度測量方向的研究。
1671-4598(2017)12-0302-05
10.16526/j.cnki.11-4762/tp.2017.12.078
TP837
A
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
