多基準站GPS定位靶場測試方法研究
2018-01-05 01:10:48李鵬勃馬方遠鄭善魁
計算機測量與控制 2017年12期
關鍵詞:用戶
李鵬勃,馬方遠,鄭善魁,王 茜
(中國兵器工業試驗測試研究院,陜西 華陰 714200)
多基準站GPS定位靶場測試方法研究
李鵬勃,馬方遠,鄭善魁,王 茜
(中國兵器工業試驗測試研究院,陜西 華陰 714200)
在靶場試驗過程中,傳統的單基準站由于基線長度的限制使其作用范圍有限,從而超出一定距離后,差分精度隨著大氣誤差相關性的減弱而明顯受到影響;為了解決靶場GPS單頻偽距差分定位距離遠時精度下降問題,提出了多基準站GPS定位偽距差分定位方法;該方法深入分析偽距方程和偽距差分定位之間的關系;建立靶場基準站網絡實時接收目標定位數據和基準站定位數據并實時傳送到控制中心;利用基于距離的線性內差模型,設計多基準站數據處理算法和多基線測量數據加權處理方法,實時解算目標定位信息;測試結果表明,多基準站GPS定位偽距差分定位方法,能夠有效地解決常規單基準站偽距差分定位精度隨用戶站與基準站距離增加而降低的問題,同時提高了測試精度。
多基準站;靶場測試;數據處理算法
0 引言
隨著我國國防科技事業的發展,采用新的測量技術,提高靶場測控系統的能力,滿足新型武器裝備發展需要是靶場建設的一項重要任務。在衛星導航引進勒場以前,測控主要以雷達和光學裝備構成陸基測控系統,這些測控裝備在以往試驗中發揮了重要作用。但由于受地球曲率等因素制約,傳統的陸基測控設備存在跟蹤范圍小、測量目標少、受天氣影響較大等難以克服的缺陷,單純依賴地面設備完成測控任務,將使測控系統組成異常龐大。以導航衛星為主的天基測控系統具有跟蹤范圍大,系統獨立性強,測量精度高,多目標、全天候測量能力,易于飛行器實施自主測控等突出優點。因此充分利用國內外導航衛星資源,是解決新型裝備試驗需求的有效途徑。
靶場試驗測試過程中,傳統的單基準站由于作用范圍有限,受到基線長度的限制,一般基準站的作用范圍為方圓30 km,超過30 km以后,大氣誤差相關性減弱,差分的結果精度就會明顯受到影響,這種誤差用任何差分法都不能消除。針對這一實際問題,提出采用多基準站在靶場測試方法研究,多基站差分GPS,利用基準站均勻的空間分布和精確估計的基準站間的對流層延遲、電離層延遲和衛星軌道誤差等空間相關誤差,最大程度的消除或者削弱了基準站到用戶站基線上的空間相關誤差,使得該基線上的模糊度得以快速準確的確定[1],可以有效解決差分過程中由于距離問題帶來的精度下降問題,該測試方法通過在靶場范圍內構建多基準站局域網,不但可以提高測試數據精度,而且還可以提升靶場測試能力。
1 GPS單基站差分定位解算
1.1 GPS衛星定位差分原理
GPS測量過程中受到衛星星歷、鐘差、大氣折射誤差等各種誤差的影響,但是這些誤差具有較強的相關性,因此可以在GPS測量中引入相對定位方法,該方法通過兩臺GPS接收機同步觀測相同的衛星,將一臺GPS接收機安置于基準站上固定不動,另一臺GPS接收機安置于運動的載體上,通過接收的觀測值之間求差,來消除具有相關性的誤差,提高定位精度。
GPS差分定位分為以測距碼偽距為觀測量的動態相對定位和以載波相位偽距為觀測量的動態相對定位。測距碼偽距相對動態定位,由安置于點位坐標精確已知的基準站接收機測量出該點至GPS衛星的偽距,該偽距中包含了衛星星歷誤差、鐘差、大氣折射誤差等各種誤差的影響,由于此時基準站GPS接收機的位置已知,利用衛星星歷數據可計算出GPS基準站至衛星的距離,當運動GPS接收機于基準站相距不太遠時,兩個測量站的誤差具有較強的相關性,將兩個距離求差,即可得出偽距改正數,可以有效的消除公共誤差的影響,提高定位精度。載波相位動態相對定位法,是通過將載波相位修正值發送至用戶站來改正其載波相位實現定位,或是通過將基準站采集的載波相位觀測值發送至用戶站進行求差解算坐標實現定位。
1.2 偽距觀測方程
偽距差分是目前應用比較廣泛的差分定位技術,其基本原理是:在基準站上利用已知坐標求出測站至衛星的距離,然后將其與接收機測定的含有各種誤差的偽距比較,并利用濾波器對所獲得的差值進行濾波求出其偏差(偽距改正數),最后將所有衛星的偽距改正數傳輸給用戶站,用戶站利用此偽距改正數改正所測量的偽距,求出用戶站自身的坐標。
根據基準站三維坐標和衛星星歷,可以得出t時刻基準站i與衛星j之間的幾何距離,距離計算公式為:
(1)
式(1)中,Xj、Yj、Zj為t時刻衛星Sj的三維地心坐標,同樣Xi、Yi、Zi為t時刻基準站i的三維地心坐標。
t時刻基準站偽距觀測方程為:
可以得出:
(2)
同理用戶接收機u到衛星j的幾何距離和偽距觀測方程為:
(3)
可以得出:
(4)
1.3 GPS差分定位解算
設基準站為i,目標站為u,將基準站和目標站對應第j顆衛星的偽距觀測方程作差,即可得到偽距單差觀測方程,衛星j的鐘差項被消除。
(5)
基準站i的坐標(Xi,Yi,Zi)已知,用戶站u的概略坐標為(X0,Y0,Z0),改正數為(Δx,Δy,Δz),所以用戶站的精確坐標為:
(6)
在(X0,Y0,Z0)對式(5)進行泰勒展開,取一階項將方程線性化得到:
(7)
式(7)中,ej1、ej2、ej3為用戶相對第j顆衛星的方向余弦:
(8)
(9)
(10)
將參考衛星1和其它觀測衛星j(j=2,3,…..n)的偽距單差方程作差,可以得到雙差觀測方程:
(11)
將式(11)轉化為矩陣形式為:
V=AΔX-L
(12)
其中:
ΔX=(Δx,Δy,Δz)T
(13)
式(13)中,n為基準站和用戶站同步觀測到的衛星數。
當兩個站同時觀測到的衛星數n≥4時,誤差方程的最小二乘解為:
ΔX=(ATPA)-1ATPL
(14)
式(14)中,矩陣P為(n-1)×(n-1)的雙差觀測值權矩陣。
(15)

2 多基準站GPS靶場應用方法與數據處理
2.1 GPS基準站局部區域差分
GPS基準站局部區域差分,是指在一定的區域布設多個GPS基準站,構成GPS基準站網,位于該區域的用戶根據多個基準站所提供的改正信息經平差計算后得出用戶站定位改正數。區域GPS差分系統較單GPS差分的可靠性和精度均有所提高,由于數據處理是把各種誤差的影響綜合在一起進行改正的,而實際上不同的誤差對定位的影響特征是不同的,如星歷誤差對定位的影響是于用戶站至基準站的距離成正比的,對流層延遲誤差主要取決于用戶站和基準站的氣象元素間的差別,并不一定于距離成正比。因此,將各種誤差綜合在一起,通過統一的模型進行改正,必然會存在不合理的因素,影響定位精度,而且這種影響會隨著用戶站離基準站的距離增大而增大,導致差分定位的精度迅速下降。所以在區域GPS差分系統中,用戶站不能距離基準站太遠,基準站需保持一定的密度和均勻度,才能保證區域GPS差分系統的定位精度。
2.2 多基準站系統靶場試驗測試方法
在靶場區域內,根據試驗實際情況,沿彈道線兩側以等邊三角形的樣式,均勻布設相距40~60 km兩個以上連續運行的GPS 基準站,構成一個基準站網,利用廣域差分GPS 和具有多個基準站的局域差分GPS 中的基本原理和方法,經過有效組合,構建GPS基準站網絡[3]。首先,基準站上配置雙頻全波長GPS 接收機,該接收機能同時提供精確的雙頻偽距觀測值,基準站按規定的采樣率進行連續觀測,并通過實時數據鏈將觀測數據傳送至控制中心進行數據處理;用戶站將其概略坐標位置發送至控制中心,控制中心根據不間斷收集GPS基準站網中每個GPS基準站的數據信息,尋找用戶站周圍基準站的數據進行網平差,算出用戶站的觀測改正數,實時解算用戶站精密坐標,這就是多基準站系統工作原理。多基準站工作原理如圖1所示。

圖1 多基準站工作原理
2.3 多基準站數據算法設計
多基站偽距改正數受用戶站與基準站的空間距離影響比較大,經過分析比較,選取Gao在1997年提出的基于距離的線性內差模型。該方法主要用于基于距離相關偏差的改正,可以有效的的消除電離層延遲,減小軌道差、電離層偏差。算法設計流程如圖2所示。
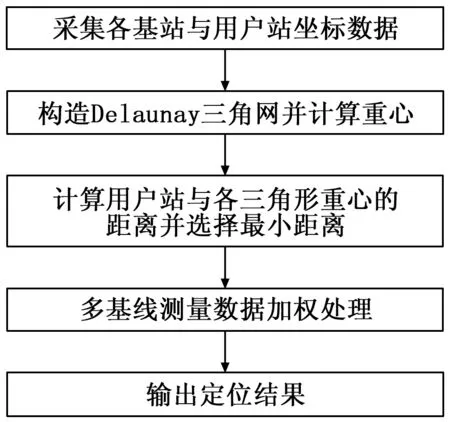
圖2 算法設計流程
首先將彈道線兩側的基準站利用Delaunay不規則三角網方法構建三角網,利用上位機接收到的基準站數據,計算出各基準站組成的三角網重心坐標,結合上位機接收到的用戶站坐標數據,遍歷所有基準站組成的三角網重心坐標,并計算出用戶站與基準站三角網重心的距離,距離最短的三角網為用戶站所選擇的最佳的三角網,最后通過基于距離的線性內插模型求解加權偽距改正數[4],從而實現用戶站精確定位。
(16)
其中:Sik為各個基準站偽距改正數,ρik分別為各個基準站的加權系數。
基準站加權系數ρik為:
(17)

(18)

2.4 試驗測試
通過在靶場進行跑車實際測試,將普通GPS和差分GPS模塊同時裝載在車上進行測試,通過數傳電臺將兩套GPS裝置的GPS數據以及基準站數據發送至控制中心;普通GPS的數據刷新率為20 Hz,差分GPS的刷新率為1 Hz,進行實時解析,普通GPS實時處理數據如圖3所示,差分GPS實時處理數據如圖4所示。

圖3 普通GPS實時數據處理結果
從差分GPS輸出的GNRMC數據格式中可以看出,差分GPS模塊處于定位狀態,且處于差分狀態,速度為47節左右,轉換后速度為24 m/s左右,通過對比普通GPS和差分GPS數據,經度、緯度、速度數據基本相符,表明多基準站靶場試驗測試方法以及多基準站數據處理算法,可以有效地解決單基站由于距離增加,精度降低的問題。
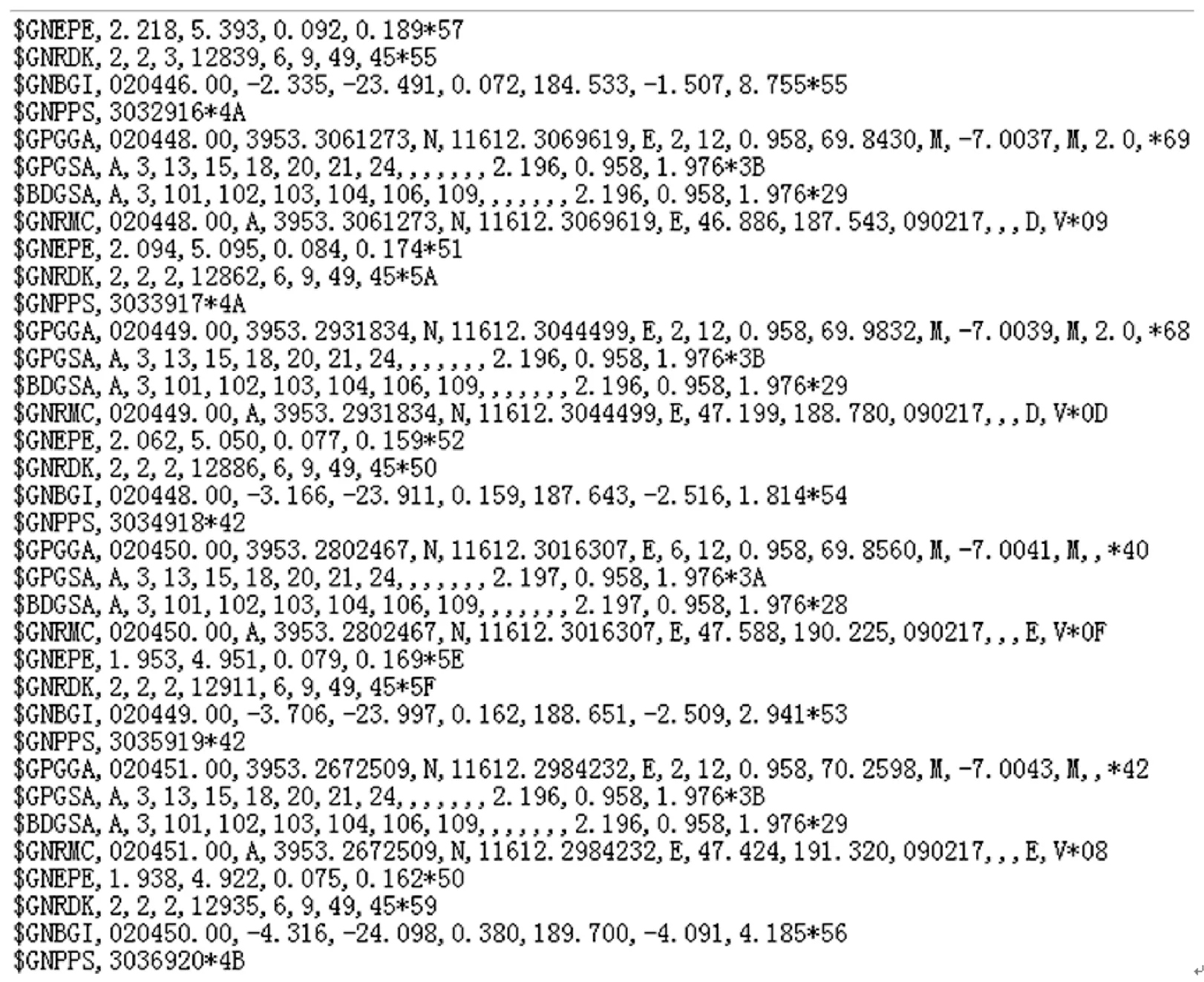
圖4 差分GPS實時數據
3 總結
多基站GPS靶場應用方法研究,主要從GPS在靶場、航空、航天等領域的應用日趨廣泛,在測試技術發展中所發揮的重要作用出發,分析了GPS偽距差分定位的原理,以及多基準站差分的特點,將多基準站差分技術應用于靶場測試,構建了多基準站靶場試驗測試方法以及多基準站數據算法設計,有效的解決了常規單基準站偽距差分定位精度隨用戶站與基準站距離增加而降低的問題,提高了用戶站在整個監測網絡中的定位精度。
[1] 張 勤. GPS測量原理及應用[M]. 北京:科學出版社,2005.
[2] 魯照權.多基站GPS差分定位在航標遙測遙控中應用[J]. 通訊技術,2012,246(45):104-106.
[3] 付向斌. 航標燈多基站GPS偽距差分定位新方法[J]. 武漢大學學報,2011,5(33):735-741.
[4] 孫中豪. 基于平面Delaunay三角網的多基站差分GPS數據處理方法[J]. 測繪地理信息,2012,37(5):37-39.
[5] 李鶴峰. 基于CORS的多基準站BDS/GPS融合差分網定位性能分析[J]. 大地測量與地球動力學,2014,34(6):81-85.
Study on GPS Positioning Range Test Method of Multiple Base Station
Li Pengbo, Ma Fangyuan,Zheng Shankui, Wang Qian
(China Academy of Weapon Industry Test and Measuring, Huayin 714200,China)
In the range test, the traditional single reference station has limited range due to the limitation of the baseline length, and the difference accuracy is obviously affected by the decrease of the atmospheric error after a certain distance. In order to solve the problem that the GPS single frequency pseudorange differential positioning accuracy decreased resulted from far distance, a multi-base station GPS positioning pseudorange differential location method is proposed. This method analyzes the relationship between pseudorange equation and pseudorange differential location in depth; establishes a range base station to receive real-time target data and base station positioning data and transmits it to the control center. In order to solve the target location information in real time, this method designs multi-base station data processing algorithm and multi-baseline measurement data weighted processing method, which uses distance difference based linearity difference model. The test results show that the multi-base station GPS positioning pseudorange differential positioning method can effectively solve the problem that the precision of single-base pseudorange differential positioning decreases with the increase of the distance between the subscriber station and the base station, and improves the test precision.
multiple base stations; range test; data processing algorithm
2017-06-14;
2017-07-08。
李鵬勃(1983-),男,碩士研究生,高工,主要從事靶場遙測及GPS/北斗定位方向的研究。
1671-4598(2017)12-0117-03
10.16526/j.cnki.11-4762/tp.2017.12.031
P228.4
A
猜你喜歡
車主之友(2022年4期)2022-08-27 00:58:26
知音·下半月(2022年5期)2022-05-23 23:17:04
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年5期)2016-11-28 09:55:15
非公有制企業黨建(2016年1期)2016-07-19 13:02:51
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
衛星與網絡(2016年12期)2016-02-05 09:23:23
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
