基于Matlab仿真設計的直接轉矩控制技術
2018-01-04 03:41:54于楠楠
微處理機 2017年6期
關鍵詞:控制技術
于楠楠
基于Matlab仿真設計的直接轉矩控制技術
于楠楠
(中國電子科技集團公司第四十七研究所,沈陽110032)
直接轉矩控制技術(DTC)采用空間矢量分析的方法,直接在定子坐標系下計算并控制電動機的轉矩和磁鏈;采用定子磁場定向,借助于離散的兩點式控制(Bang-Bang控制)產生脈寬信號,直接對逆變器的開關狀態進行最佳控制,以獲得轉矩的高動態性能。主要介紹了三相異步電動機直接轉矩控制系統的控制原理,基于Matlab仿真平臺建立三相異步電動機直接轉矩控制系統的整體仿真模型以及該系統各組成的仿真模型。通過對軌跡的觀測,檢測是否達到控制要求,以檢驗直接轉矩控制的效果。最后對仿真圖進行分析,驗證直接轉矩控制技術的有效性和可靠性。
異步電機;直接轉矩控制;定子磁鏈;空間矢量;Matlab仿真;可靠性
1 引言
直接轉矩控制技術是上世紀80年代由德國魯爾大學的Depenbrock教授和日本學者Takahashi提出并逐漸發展起來的新技術[1-2],它是繼矢量變換控制技術之后,與之并行發展的一種新型的高性能的交流調速傳動控制技術[3]。
直接轉矩控制是用空間矢量的分析方法直接在定子坐標系下計算與控制交流電機的轉矩,借助雙位模擬調節器產生PWM信號,直接對逆變器的開關狀態進行最佳控制,以獲得轉矩的高動態性能[4]。它省掉了復雜的矢量變換,其控制思想新穎,控制結構簡單,控制手段直接,信號處理的物理概念明確。該控制系統的轉矩響應迅速,是一種具有高靜態和動態性能的交流調速方法。在直接轉矩控制分析中,一般選用空間矢量的數學分析方法[5]。主要介紹直接轉矩控制系統的基本結構和原理,并利用Matlab/Simulink軟件根據異步電動機的數學模型建立仿真模型。然后在Simulink環境下使用該模型組建異步電動機直接轉矩控制系統[6]。通過改變控制系統中直接影響電動機性能的轉矩滯環調節器和磁鏈滯環調節器的參數,通過仿真得到仿真圖,對仿真進行分析,驗證直接轉矩控制方法的有效性和可靠性。
2 直接轉矩控制系統原理
直接轉矩控制系統的基本控制方式如上所述,它的基本結構可分為以下幾個部分[7]:
(1)控制部分:分為磁鏈滯環調節器、轉矩滯環調節器;
(2)逆變部分:由逆變器組成;
(3)電機部分:為異步電動機。
系統原理圖如圖1所示,圖中各個單元器件名稱為:AMM—異步電機數學模型;UCT—坐標變換單元;DMC—磁鏈自控制單元;AZS—零狀態選擇單元;AMC—轉矩計算單元;ATR—轉矩調節;UT—逆變器。
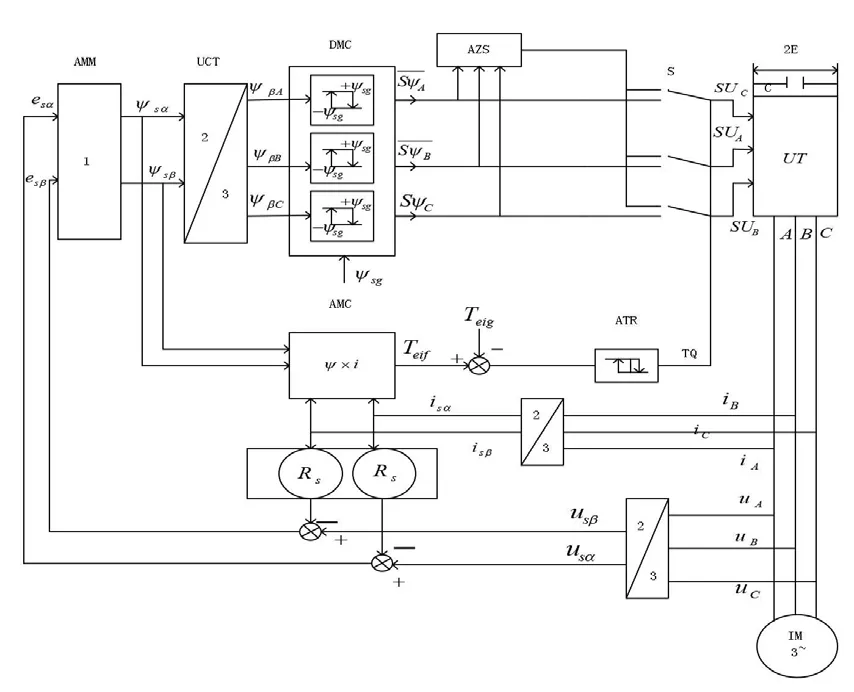
圖1 直接轉矩控制系統原理圖
由圖可見,直接轉矩控制系統工作原理為:通過AMM計算得到定子磁鏈,并分解到坐標軸,然后經過UCT進行坐標變換,通過將計算得到的磁鏈值與DMC給定的磁鏈值進行比較,得到磁鏈開關信號,通過AMC計算得到轉矩值,根據轉矩調節器ATR的輸出量決定是否插入零狀態,確定電壓開關狀態,對逆變器的輸出電壓進行控制,使其產生六邊形磁鏈。
3 仿真模型的搭建
在利用MATLAB進行系統仿真時,首先根據原理圖,把系統分成幾個子系統,然后在Simulink環境下用模塊庫中的模塊搭建每個子系統,加以封裝利用,最后把所有模塊連接起來構成一個完整的系統。根據系統設計思想構造出系統仿真模塊結構,結構總圖如圖2所示。
三相異步電動機直接轉矩控制系統仿真模型由7個主要模塊組成:三相不控整流器(Three-phase diode rectifier)、制動斬波器(Braking chopper)、三相逆變器(Three-phaseinverter)、測量單元(Measures)、異步電動機模塊(Induction machine)、轉速控制器(Speed Controller)和直接轉矩控制模塊DTC。其中,前5個模塊組成系統主電路;主電路模塊和轉速控制器模塊結構基本與磁場定向矢量控制系統相同[8]。
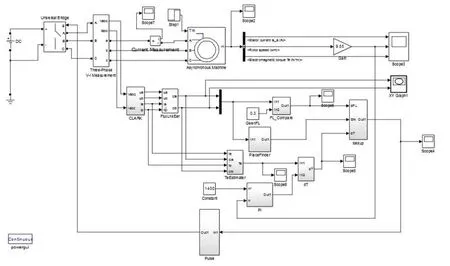
圖2 直接轉矩控制仿真模型
系統原理的實現:三相交流電源依次經三相二極管整流、三相逆變器和電壓電流測量模塊給異步電機供電;給定轉速加于轉速控制器,經過磁鏈查表輸出給定磁鏈;給定速度與速度反饋(實際速度)比較后經過PI調節器輸出給定轉矩信號。子系統包括轉矩和磁鏈滯環控制模塊,轉矩和磁鏈觀測模塊,磁鏈扇區判別模塊,電壓開關表和開關控制器,給定轉矩和磁鏈分別與實際轉矩和磁鏈取差值,然后分別經過轉矩和磁鏈滯環比較器,與磁鏈扇區sector一起輸入到電壓開關表中,選擇合適的電壓矢量;電壓電流測量模塊輸出i_ab和V_abc,送入到轉矩和磁鏈觀測模塊,用于計算磁鏈。直接轉矩控制系統采用6個開關器件組成的橋式三相逆變器有八種開關狀態,可以得到六個互差60度的電壓空間矢量和兩個零矢量。交流電動機定子磁鏈受電壓空間矢量控制,因此改變逆變器的開關狀態可以控制定子磁鏈的運行軌跡,從而控制交流電動機的運行狀態。
4 仿真結果與分析
在直接轉矩控制系統Simulink仿真中,異步電動機模型規定參數設定為:額定功率為5500W,額定電壓為380V,定子電阻為0.0217Ω,轉子電阻為0.329Ω,定子電感為0.0001048H,轉子電感為0.000317H,定轉子互感為0.01162H,極對數為2,轉動慣量 0.0214kg·m2,給定轉速為 1400 r/min,基本采樣時間為0.1s。
(1)給定轉矩為0.3時仿真波形如圖3-4所示:

圖3 磁鏈軌鏈
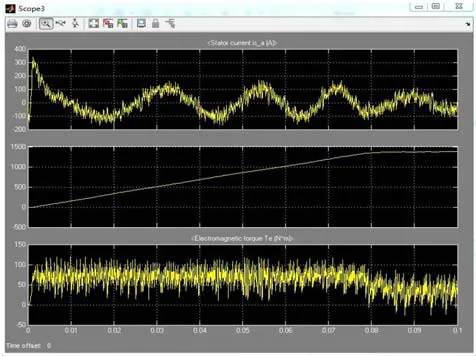
圖4 三相電流、轉矩波形
(2)給定轉矩為1.5時仿真波形如圖5-6所示:
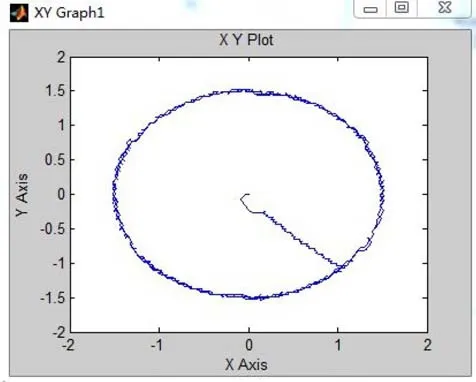
圖5 磁鏈軌鏈
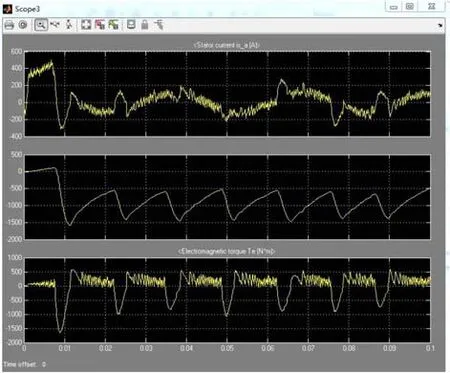
圖6 三相電流、轉矩波形
由仿真圖像可知,電機在啟動過程中,在PI調節器作用下,對三相電流、轉矩起到放大作用,使轉矩迅速提高,然后達到穩定。磁鏈軌跡近似為圓形。
5 結束語
直接轉矩控制技術作為電機控制領域一種新的控制策略,必然會不斷發展和完善,相信今后對電機的控制必然會更加簡單、可靠,更加令人滿意。如何把已有的知識運用到實際中,實現運動控制的簡單化、經濟化和最優化,將是一個更為艱巨的任務。
[1] Blaschke F.A new method for the structure decoupling of ACinduction machine[J].2ndIFACon multivariable tec.Control system,1971,11~15.
[2] Blaschke F.The principles of field orientation as applied to thenew TRANSVEKTORclosed loop controlsystemfor rotatingfield nachines[J].Sicmens Review1972,39(5):217~220.
[3] 巫慶輝,邵誠,徐占國.直接轉矩控制技術的研究現狀與發展趨勢[J].信息與控制,2005,34(4):28~30.Wu Qinghui,Shao Cheng,Xu Zhanguo.Survey of Research Status Quo and Development Trends about Direct Torque Control[J].Information and Control.2005,34(4):28~30.
[4] 何萍,郭軍.基于Matlab/Simlink的異步電機直接轉矩控制系統仿真[J].電氣應用.2007,26(1):50~53.He Ping,Guo Jun.Simulation of Asynchronous Motor Direct Torque Control System Based on Matlab/Simlink[J].Electrotechinal Application.2007,26(1):50~53.
[5] 李夙.異步電動機直接轉矩控制[M].北京:機械工業出版社,1999.Li Su.Asynchronous Motor Direct Torque Control[M].Beijing:Mechanical Industry Press,1999.
[6] 王成元,夏加寬,楊俊友等.電機現代控制技術[M].北京:機械工業出版社,2006.Wang Chengyuan,Xia Jiakuan,Yang Junyou.Modern Control Technology[M].Beijing:Mechanical Industry Press,2006.
[7] 武莎莎,張濤.異步電機直接轉矩控制系統研究[J].微電機.2010,29(4):12~15.Wu Shasha,Zhang Tao.Direct Torque Control Research on Indretion Motor[J].Mechanical Industry Press.2010,29(4):12~15.
[8] 張麗麗,王叢嶺.異步電機直接轉矩控制系統的MATLAB仿真.現代電子技術[J].2006,29(4):33~37.Zhang Lili,Wang Congling.Matlab Simulation of DTCSystem of The Asynchronous Motor[J].Modern Electronics Technique.2006,29(4):33~37.
Direct Torque Control Technology Based on Matlab Simulation
Direct torque control(DTC)with space vector analysis method directly calculates and controls the torque and flux linkage of the motor under the stator coordinate;using stator magnetic field orientation and generating pulse width signal by discrete two-point control(Bang-Bang control),the inverter switch state is directly under optimal contrl to obtain high dynamic performance of the torque.Introducing the control principle of direct torque control system of three-phase asynchronous motor,the simulation models of the whole and each part of three-phase asynchronous motor direct torque control system is established based on Matlab simulation platform.Through the observation to the trajectory,checking whether the control reauirements are satisfied,as to examine the effects of direct torque control.Finally,the simulation graph is analyzed to verify the effectiveness and reliability of the direct torque control technology..
Asynchronous motor;Direct torque control;Stator flux linkage;Space vector;Matlab simulation;Reliability
10.3969/j.issn.1002-2279.2017.06.018
TP277
A
1002-2279-(2017)06-0078-04
于楠楠(1983—),男,遼寧省沈陽市人,工程師,主研方向:微電子設計。收期日期:2017-10-13
猜你喜歡
機電安全(2022年1期)2022-08-27 02:15:16
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
電子測試(2018年14期)2018-09-26 06:04:44
上海大中型電機(2017年4期)2017-02-06 05:27:06
山東工業技術(2016年15期)2016-12-01 05:30:51
照明工程學報(2016年3期)2016-06-01 12:17:56
水電站機電技術(2014年4期)2014-10-13 08:30:07
水電站機電技術(2014年1期)2014-09-26 11:59:46
導航定位與授時(2014年2期)2014-04-27 13:41:08