地面無人作戰平臺“作戰機器人”國內外研究現狀
2018-01-04 02:52:52李玉璽李正宇徐宏斌侯林海
兵器裝備工程學報 2017年12期
關鍵詞:系統
李玉璽,李正宇,徐宏斌,侯林海
(西安現代控制技術研究所, 西安 710065)
【系統工程、測量與控制】
地面無人作戰平臺“作戰機器人”國內外研究現狀
李玉璽,李正宇,徐宏斌,侯林海
(西安現代控制技術研究所, 西安 710065)
面對日益復雜的國際局勢以及局部區域內不間斷的軍事對抗,殘酷的戰場環境對士兵的生命安全帶來巨大威脅。地面無人作戰系統以其眾多優勢,將逐步登上歷史舞臺,替代作戰人員完成偵察、探雷、排雷、排爆、火力打擊、掩護作戰人員以及戰中環境下數據傳輸任務。本文總結了近年來基于地面環境下國內外無人作戰平臺的演變與發展,分析了各無人作戰系統的優缺點,結合未來的軍事發展動向,提出了陸地無人作戰平臺的發展趨勢。
無人平臺;偵察;排雷;數據傳輸
近年來無人飛機、無人潛艇以及無人戰斗機器人等無人化裝備迅猛發展,并在實戰中得到應用,已成為信息化戰場上重要的攻擊與防御力量[1-2]。其中,無人戰車是指在地面上行駛的能執行特定任務的機器人,是機械化、信息化、電子化與智能化高度融合的機動作戰平臺[3]。隨著高新技術的飛速發展與武器系統的升級換代,戰場上戰斗人員的生存能力越發得到重視,為保護作戰人員的生命,近年來發展的地面無人作戰系統能夠協助士兵在復雜的作戰空間探測敵人,擴大作戰視野,有效在偵察、核生化武器探測、障礙突破、反狙擊和直接射殺等任務時避免人員損傷,大幅提高了作戰人員的生存率、靈活性和戰斗力[4]。目前,地面無人作戰系統己經在阿富汗洞穴探察活動、波斯尼亞雷區排爆及美國世貿中心的搜索工作中得到應用[5],并在實戰考驗中積累了豐富經驗,日益受到各國的關注[6-8]。
政治與軍事需求是無人作戰系統發展的直接動力,而科技的發展為無人作戰平臺提供了技術保障[9]。在和平發展為現代主題時代的國際局勢下,還存在局部區域內的戰爭形勢,以及各超級大國之間的軍事裝備不平衡帶來的區域安全隱患,我國應該根據時代主題提高國家防御能力,加速我軍新型裝備的研發。本文以陸地無人戰車(作戰機器人)為研究對象,總結了近年來國內外無人作戰車的演變與發展,分析了各無人作戰系統的優缺點,結合未來的軍事的發展動向,提出了幾點陸地無人作戰平臺的發展趨勢。
1 國外陸地無人作戰平臺的發展狀況
1.1 美軍地面無人作戰平臺的發展狀況
美國在地面無人作戰平臺的研究方面走在世界前列[10],其軍用無人作戰系統發展迅速,且實用價值也在不斷增強,并已逐漸開始系列化[11-14]。
1.1.1 “蜘蛛”無人地面戰車
“蜘蛛”無人地面戰車[15]于2001年開發出原型車,單次續航可達14天或450 km距離;可攀越1~2 m的障礙,最大可工作斜坡35°;有效載荷部分大于滿載總體質量的25%。戰車獨特的車體結構可提供大容量載荷倉,并能根據有效載荷的位置上下調整載荷倉位置,能夠變換四種武器站。其外觀如圖1所示。

圖1 “蜘蛛”無人地面戰車
1.1.2 “野外感知”無人地面戰車
“野外感知”無人車[15]由Sarnoff公司研發,外觀如圖2所示。其具有感知野外復雜環境和自主導航能力的特點,在車載傳感器觸發之前,由“飛眼”無人機先行飛抵無人車預定地點高空搜尋危險,并將探測圖像實時傳至無人車系統,無人車在行駛的同時修正武器瞄準點,到達目的地直接進行打擊。

圖2 野外感知無人車在草地自主運行
1.1.3 “破碎機”無人地面戰車
與“蜘蛛”無人地面戰車比較,“破碎機”無人車[16-17]采用了新車體、新懸掛系統,并進行多項新型技術改進。“破碎機”無人車總質量5.9 t,比“蜘蛛”無人車減重30%,可垂直翻越1.22 m高墻,最大速度11 m/s,爬坡度40°,負載能力達1.36 t。“破碎機”無人車可進行貨物組合負載[17],包括武器和偵察監視裝備,其外形如圖3所示。由于大型“破碎機”成本過于高昂,因此發展了小型“破碎機”。小型“破碎機”無人車[15]是一種小型、堅固耐用、多功能的地面車輛平臺,全車外形尺寸僅762 mm×508 mm×305 mm,總質量為56.7 kg,有效載荷高達45.4 kg,其良好的機動性與穩定性和載荷能力并采用模塊化的設計,使其成為危險品處理、排爆、偵察和監視等各種任務的理想平臺。

圖3 “破碎機”無人地面戰車
1.1.4 “APD”無人地面戰車
“APD”無人車[15]于2009年8月進行了首次展示,是在“破碎機”無人車的基礎上集成開發的,其最高時速達到80 km/h,并具有自主變換車道的能力;總質量為9.3噸,偵察模塊伸長后全車長4.57m,采用柴電混合動力系統。
1.1.5 黑騎士無人戰車
黑騎士無人戰車[18]具備自動駕駛能力,其感知和控制模塊包括高靈敏度的攝像機、激光雷達、熱成像儀和GPS,外觀如圖4所示。戰車總重為9.5 t,全長5 m,寬2.44 m,高2 m,配備一門25毫米的機關炮和1挺7.62 mm的機槍。該車可以手動操作和無人自主操作,能夠自動規劃航路,靈活地規避障礙物,晝夜都能夠使用;其主要任務是實施前方偵察、收集情報、對危險地域進行勘察,也可以伴隨步兵作戰,提供火力支援。

圖4 黑騎士無人戰車
1.2 俄羅斯地面無人作戰平臺的發展狀況
俄羅斯在無人作戰平臺領域起步相對較晚,但借助著雄厚的技術積累,俄羅斯地面無人作戰平臺的研發速度非常快[19-21],可謂“后發先至”。2016年初俄羅斯開展示了三款新型“烏蘭”系列地面無人車輛[22],功能涵蓋消防、掃雷和戰斗。
1.2.1 “烏蘭”-6型MRTK-R多功能無人掃雷車
“烏蘭”-6無人駕駛多功能掃雷系統結構緊湊,外觀低矮,車頭前方安裝掃雷連枷,如圖5所示。“烏蘭”-6車頂安裝有攝像頭、天線等設備,自帶的掃雷工具組件包括:掃雷輥、推土鏟、夾爪、叉車和機械臂等,同時還配備了不同類型的車載儀表以及4個全方位攝像頭。
1.2.2 “烏蘭”-9武裝無人戰斗車
“烏蘭”-9武裝無人戰斗車[22]在總體設計上與“烏蘭”-6基本相似,但它不是工程輔助類無人車輛,而是戰斗型無人車,如圖6所示。全車裝有8~10 mm鋼裝甲,其中發動機艙等關鍵部位的防護經特別加強,整車能夠防護7.62 mm口徑槍彈攻擊。制導方式采用無線電指令與激光駕束技術,命中率較高,其最大射程為8 km。“烏蘭”-9還可以選裝偵察設備,在實戰中一輛安裝偵察設備的偵察型“烏蘭”-9和另一輛安裝無人武器站的武裝型“烏蘭”-9相配合,可構成一個車組,以執行偵察和火力支援的協同任務。
1.2.3 “烏蘭”-14型MRTK-P無人消防/掃雷車
“烏蘭”-14是一種專門針對具有生命危險的高危環境和交通不便地區研發的無人車系統。與“烏蘭”-6類似,但尺寸更大。其空載重量為11噸,戰斗全重14噸。“烏蘭”-14的鋼裝甲主要不是針對槍彈打擊,而是應對防爆。“烏蘭”-14的車體前部仍保留有破障清障工具,“烏蘭”-14還可以臨時兼職掃雷無人車任務,其結構如圖7所示。

圖7 “烏蘭”-14無人消防車
1.2.4 俄羅斯其它型號無人戰車
俄羅斯還研發了更大尺寸的“天王星9”多功能無人戰車,可搭載30毫米機關炮以及反坦克導彈發射筒,具有可升降式武器平臺,使其可隱藏在隱蔽物后方發動攻擊,其外觀如圖8所示。
圖9為“平臺”M無人戰車,該車配有重機槍和四聯裝火箭筒發射器,火力遠勝于美軍同類作戰機器人。
圖10為俄軍另一種“阿爾戈”輪式無人戰車。其具有較強的兩棲橫渡能力,且還能在水上開火,多輪式結構便于其在沙漠中馳騁。

圖8 “天王星9”多功能無人戰車

圖9 “平臺”M無人戰車
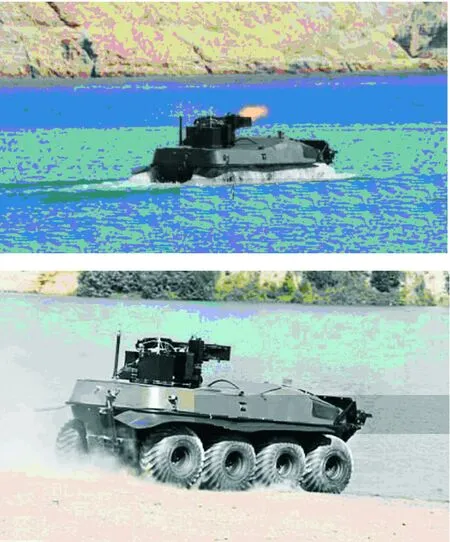
圖10 “阿爾戈”輪式無人戰車“阿爾戈”
1.3 烏克蘭地面無人作戰平臺的發展狀況
1.3.1 “Phantom”無人戰車
“Phantom”外觀如圖11所示。“Phantom”上裝備四臺ATGM“屏障”發射器,一臺12.7毫米機槍以及榴彈發射器、熱成像相機和激光測距儀等智能模塊。“Phantom”具有6×6的輪子配置、獨立懸架以及能夠達到38 km/h的柴油發動機,車中重1噸,可攜帶多達350 kg的武器或有效載荷。該車具有較高的滲透性,可用于偵察和作戰目的,也可作為交付彈藥或疏散傷員的車輛。

圖11 烏克蘭無人戰斗車“Phantom”
1.3.2 烏克蘭最新無人戰斗車
烏克蘭最新一款地面無人作戰車外觀結構如圖12所示。該車集成了可見光、微光、紅外、激光、雷達等觀測系統,可完成復雜戰場環境下對目標的搜索、探測、識別、定位和跟蹤,并實時將目標圖像和位置信息傳輸到上級指揮所。

圖12 烏克蘭最新無人戰斗車
1.4 西方其他國家地面無人作戰平臺的發展狀況
英國雷聲公司研制的“德米斯”履帶式無人步兵系統[23]如圖13所示,戰車兩側分別裝配一套履帶艙,每套履帶艙都安裝獨立的動力系統。中央裝載艙裝載整合了多種武器設備,使其成為名副其實的“百變金剛”。由于裝配了先進的“地面之眼”傳感器,可以對戰場上的爆炸物進行全方位的探測與定位。

圖13 “米德斯”履帶式步兵戰車
德國現裝備的地面無人機器人主要以掃雷和排爆為主,其中最具代表性的當屬“清道夫”2000掃雷車、“犀牛”掃雷車、Rode爆炸物清除機器人以及GARANT-3多用途機器人等。埃爾比特公司研制的“前衛”自主式無人地面車輛和飛機工業公司研制的“守護者”無人安全車是以色列地面無人找車的代表作。兩家公司合力研制的“前衛守護者”的無人地面車輛,則是以色列第三代無人地面車輛,攜載3部電視攝像機,配備2個數據傳輸通道和1個音頻通道,能夠和其它無人設備(無人機)建立通信聯絡和進行數據傳輸。
除了上述國家外,目前地面無人車輛研發項目還有加拿大的“改進型地雷探測計劃”,意大利、法國和西班牙聯合開展的“先進移動機器人”項目和西班牙的“羅德”輪式無人地面車輛等。
2 國內地面無人作戰平臺的發展狀況
我國在地面無人作戰系統的研發方面與發達國家相比有一定差距[24-25]。但我國政府一直非常重視軍用機器人技術的研究與開發,面對這種新型武器帶來的全方位沖擊,擬定了陸海空無人作戰平臺發展方向,針對陸地無人作戰平臺,以中國兵器工業集團為代表的各科研單位在陸地無人作戰平臺方面也開始嶄露頭角[26]。
2.1 “猛獅-3(Fierce Lion 3)”地面無人車
“猛獅-3(Fierce Lion 3)”無人駕駛汽車與SUV十分相似,車頂架設有攝像系統,車體上裝有多種微型傳感器與車載雷達,裝備有先進專用計算機,可以通過雷達、圖像識別系統和衛星導航系統跟蹤定位附近的車輛,確保車輛安全行駛,同時避讓其他機動車輛,汽車結構如圖14所示。技術人員正在全力研發該車的配套設施及武器裝備,因此這款車很可能服役列裝于中國陸軍部隊。
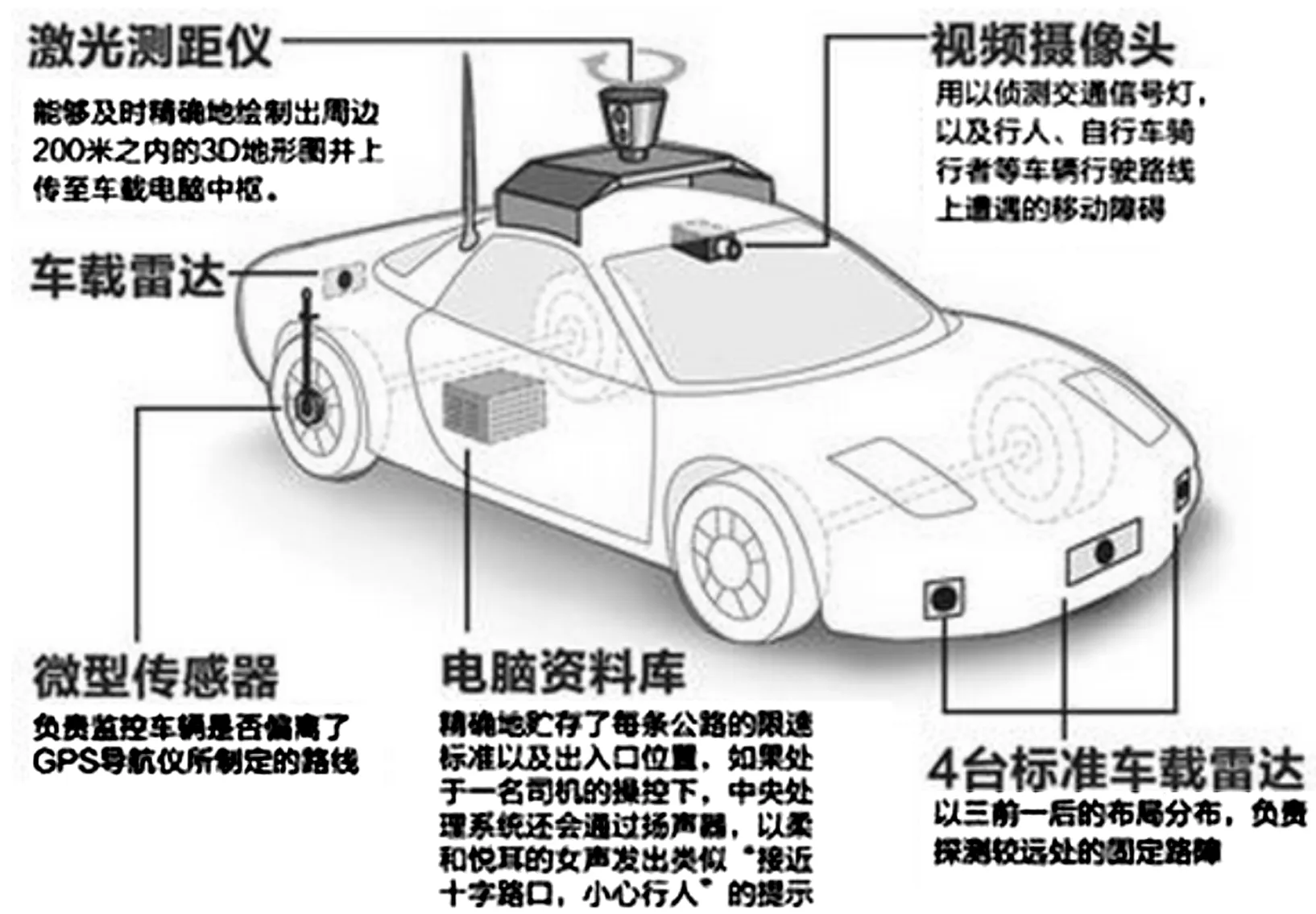
圖14 猛獅-3無人車輛外形
2.2 中國“五虎”地面無人戰車
2.2.1 “GHRYSOR”地面無人車
“GHRYSOR”地面無人車由中國兵器北方車輛研究所研制,其外觀如圖15所示。GHRYSOR全地形車長2.92 m,寬1.64 m,高1.92 m,重950 kg,地面最大載荷為680 kg,水上最大載重為300 kg,其地面行駛速度高達45 km/h,水中達4 km/h,最大爬坡度大于37°。底部車身采用高密度聚乙烯材料,因此可在-40℃~50℃寬溫度范圍下工作。

圖15 GHRYSOR外觀圖
2.2.2 “MOSRO”室內監控機器人
MOSRO是一款用于室內監控的機器人,可以代替警衛人員在倉庫、機場、停車場等重點場所執勤,內置多種語音庫,可完成更復雜的對話。上面安裝有各種氣體、溫度傳感器以及毒氣檢測傳感器,能自動感知周圍的障礙物,從而在室內自由行走,最大行進速度4 km/h,可爬13°的斜坡,從而可以減少軍隊后勤人員的工作量,并能完成一些危險性的檢查工作。
2.2.3 “ASENDRO EOD”模塊式排爆機器人
ASENDRO EOD長約0.6 m,寬高0.4 m,使用直流電機驅動,最大行駛速度可達10 km/h。該機器人采用2 400 MHz通信頻率,同時具有433 MHz的安全數據無線通信功能,可進行視頻傳輸。在野外無線遙控的效半徑可達2 km。ASENDRO EOD的上方將安裝精密的操作臂,操作臂頂端是立體攝像機和平行爪,用來抓取未爆炸彈等危險物。
2.2.4 “ASENDROSCOUT”野外偵察機器人
偵察機器人ASENDROSCOUT的基本結構、控制站與ASENDRO EOD基本一致,只是把上方的平行爪、立體攝像機,換成了寬角彩色和熱成像攝像機,具備運動識別能力。最大光學變焦18倍,可以工作在7~14 μm波段,鏡頭視角達50°×35°。行走裝置可以快速更換為四個輪胎,更便于在野外執行任務。
2.2.5 “OFRO”微型坦克
“OFRO”微型坦克長1.12 m,寬0.7 m,高0.4 m,重54 kg,最大載重40 kg。全車采用電池供電方式,在滿電方式下可連續工作12 h。速度可以達到7.2 km/h。工作溫度在-20℃~60℃。車上安裝有超聲測距傳感器、紅外傳感器、DGPS接收器、GSM/GPRS/UMTS通信模塊等設備,既能自主巡邏,也可以遙控操縱。“OFRO”微型坦克擁有多項功能,只要安裝不同的任務設備即可。該型機器人能夠探測出目前所有的軍事、工業用有毒氣體,并在數秒鐘內給出確切的分析結果。OFRO外觀如圖16所示。

圖16 OFRO外觀圖
2.3 火箭軍某新型遙控特種車輛
據解放軍火箭軍某部組織的一場實戰化演練傳來的報道,火箭軍已經裝備了新型遙控特種車輛,這種無人遙控車輛在平時、戰時均可發揮巨大作用,可減少人員傷亡率,提高作戰效率,同時還具有火災消防功能,新型遙控特種車輛如圖17所示。

圖17 新型遙控車輛
2.4 “自動駕駛”裝甲車
圖18這款所示的無人駕駛裝甲車是在水路兩棲63式裝甲運兵車基礎上改進的,安裝有雷達和攝像頭視頻系統。作為軍用自動駕駛車輛,需要更多的傳感器數據來完成偵察和再補給任務,今后還可能加入戰斗或工程等領域。

圖18 自動駕駛裝甲車
3 總結與展望
無人作戰平臺是無人系統向更高技術和更強作戰能力方向深入發展的一種全新武器系統,涉及到控制、電子、信息、通信、計算機、材料等多項技術領域。無人戰車作戰具有無人員傷亡、突襲性強、火力強大、機動速度快、作戰效益高、戰場部署快等諸多優點,可能實現以零傷亡的代價完成作戰使命,顯著提高系統作戰效能,在戰場應用對增強部隊的作戰能力、保存有生力量及提高作戰效能具有重要意義。隨著微電子、光電子、納米材料、微機電、計算機、動力裝備等高新技術的不斷發展,無人作戰系統執行任務的領域將不斷擴大、完成各種作戰任務的能力不斷提高,無人作戰系統在未來信息化戰爭以及反恐戰爭中的作用將日趨突顯。因此,迫切需要深入研究無人作戰系統,努力突破相關學科的關鍵技術,增強無人作戰系統的操作性和開放性,以促進無人作戰系統的快速發展,滿足未來信息化戰爭中關鍵作戰任務的需要。
1) 利用專用傳感設備結合計算機系統對戰場上的物體、環境、語言、符號等信息進行自動識別,使之不僅能高效識別目標性質、目標間關系,還能實現人和機器、機器人與機器人之間的信息交流。
2) 隱身技術已經成功的應用到戰斗機上,從而減小了戰斗機的可探測性,為了進一步提高陸地無人戰車的生存能力,使陸地無人戰車披上隱身的“外衣”,從而在戰場上獲得先機。
3) 研制可搭載各類自動武器站的地面無人戰車,使陸地無人作戰平臺可針對不同的作戰環境選配合適的武器戰,這樣一車配多器的方式不但可以有效的降低成本,還可大大提高其特定環境下的作戰能力。
4) 在陸地無人平臺外部裝載先進的觸覺感知傳感器以及化學傳感器,對周圍環境以及敵情進行實時感知,進一步提高無人作戰平臺的快速反應能力。
5) 為了防止電磁戰使無人作戰平臺致盲甚至癱瘓,應致力于研發反電磁信息裝備,使系統能屏蔽任何頻率以及帶寬的干擾。
6) 無人平臺武器系統是各國有待繼續探索的新領域,從總體到部件設計均要充分考慮地面無人作戰平臺的新型作戰形式,該系統的研發將促進兵器工業進一步開拓新的技術領域,實現陸軍武器裝備的跨越式發展。
7) 針對現代復雜的戰爭樣式、模式,陸海空聯合無人作戰平臺將引領是未來戰爭形態的一個必然趨勢,如何提高信息化條件下三種無人平臺的聯合作戰能力,將是一個全新的課題。
[1] JABBARPOUR M R, ZARRABI H, JUNG J J, et al.A green ant-based method for path planning of unmanned ground vehicles [J].IEEE Access, 2017(5): 1820-1832.
[2] FAROOQ W, KHAN M A, REHMAN S.AMVR: A multicast routing protocol for autonomous military vehicles communication in VANET[C] Applied Sciences and Technology (IBCAST), 2017 14th International Bhurban Conference on.IEEE, 2017: 699-706.
[3] BLOSS R.Live demonstrations highlight unmanned vehicle show[J].Industrial Robot: An International Journal, 2008, 35(2): 103-107.
[4] 王金梅,龐曉賓.地面無人作戰平臺武器系統技術分析及展望[J].兵工學報,2010(32): 163-166.
[5] 王曉東.地面無人作戰平臺指揮控制系統關鍵技術的研究[D].南京:南京理工大學, 2007.
[6] 湯德東.地面無人作戰平臺指揮控制系統設計及實現[D].南京:南京理工大學,2007.
[7] 章小兵,宋愛國.地面移動機器人研究現狀及發展趨勢[J].機器人技術與應用,2005(2):19-23.
[8] 曾國棟,張殿富.國內外無人地面武器機動平臺發展現狀及趨勢[J].科技信息,2009,36(354): 356.
[9] 仲崇慧,賈喜花.國外地面無人作戰平臺軍用機器人發展概況綜述[J].機器人技術與應用,2005 (4):18-24.
[10] 旭鴻.美國海軍陸戰隊開發新型車輛[J].坦克裝甲車輛, 2001(009):21-22.
[11] 王軍良.美海軍陸戰隊評估TerraMax無人車隊系統[J].國外坦克,2011(10): 6-6.
[12] 劉治國,王超.美國軍用機器人發展概覽[J].現代兵器, 2001(7): 18-20.
[13] 李偉,王彥鋒,王鳳彪,等.美軍地面機器人發展掃描[J].汽車運用, 2010(4):27-28.
[14] 沈陽.美軍無人作戰平臺關鍵技術[J].現代軍事,2015(3):77-79.
[15] 陳云峰, 鄒丹.美國先進野外無人戰車發展歷程[J].輕兵器, 2014,14:009.
[16] YOUNG S H,MAZZUCHI T A, SARKANI S.A.Framework for Predicting Future System Performance in Autonomous Unmanned Ground Vehicles[J].IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1192-1206.
[17] 楊曉波.無人作戰系統之八“粉碎者”:技術超前的無人戰車[J].輕兵器,2010,8:008.
[18] 杜明,王威.“黑騎士”無人裝甲概念車[J].兵器知識,2008 (7):53-55.
[19] 施征.俄羅斯對無人戰車的需求,運用及編配[J].國外坦克,2016(3):49-55.
[20] 梓文.俄羅斯Uran-9無人地面戰車[J].兵器材料科學與工程,2017,40(1):114-114.
[21] 王軍良.俄羅斯新型 “旋風” 無人戰車[J].國外坦克, 2016 (8): 5-5.
[22] 田聿.俄“烏蘭”-9無人戰車開赴敘利亞[N].中國國防報,2017-01-20012.
[23] 趙東艷,林琳.未來戰場的“超級戰士”“德米斯”履帶式模塊化步兵系統[J].輕兵器,2016, 21:011.
[24] 苗法禮.無人戰車將要馳騁疆場[J].國防技術基礎,2006 (5):47-48.
[25] 蘇繼杰,鄭幸.無人作戰系統發展對陸軍建設影響[J].國防科技,2016(5):82-84.
[26] 趙先剛.無人作戰系統發展對未來戰爭的影響[J].國防科技,2015(5):55-58.
GroundUnmannedCombatPlatform“CombatRobot”DomesticResearchStatus
LI Yuxi, LI Zhengyu, XU Hongbin,HOU Linhai
(Xi ’an Modern Control Technology Research Institute, Xi ’an 710065, China)
Facing the increasingly complex international situation and the constant military confrontation in the local area, the brutal battlefield environment undoubtedly poses a great threat to the life and safety of the soldiers. In contrast, ground unmanned combat systems have avoided non-combat subtraction. Aiming at the development trend of the future war, unmanned combat system will gradually boarded the stage of history, the alternative to the warfighter reconnaissance, detection, demining, complete vehicle, fire fighting, cover the warfighter and battle environment data transmission task. At home and abroad in recent years are summarized in this paper, based on the ground environment evolution and development of unmanned combat platform, analyzes the advantages and disadvantages of the unmanned combat system, combining the development trend of the future military, puts forward some land the development trend of unmanned combat platform.
unmanned platform; reconnaissance; mine; data transfer
2017-08-25;
2017-09-15
李玉璽(1984—),男,博士,工程師,主要從事先進制造技術研究。
10.11809/scbgxb2017.12.029
本文引用格式:李玉璽,李正宇,徐宏斌,等.地面無人作戰平臺“作戰機器人”國內外研究現狀[J].兵器裝備工程學報,2017(12):124-130.
formatLI Yuxi, LI Zhengyu, XU Hongbin,et al.Ground Unmanned Combat Platform “Combat Robot” Domestic Research Status[J].Journal of Ordnance Equipment Engineering,2017(12):124-130.
TJ811
A
2096-2304(2017)12-0124-07
(責任編輯唐定國)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32