斜床身數控車床機器人自動上下料改造
2018-01-03 05:46:09唐興貴
設備管理與維修 2017年12期
關鍵詞:數控車床
唐興貴
(昆明工業職業技術學院,云南安寧 650302)
斜床身數控車床機器人自動上下料改造
唐興貴
(昆明工業職業技術學院,云南安寧 650302)
為提高數控車削加工的切削效率和加工精度,對CK4536斜床身數控車床進行機器人自動上下料改造。對HR20-1700-C10機器人及CK4536數控車床的特點進行了分析。針對實際的數控加工,設計機器人自動上下料機構,機器人與數控車床電氣線路分析改造,規劃機器人運行軌跡。該改造能使機器人于數控車床相互配合,實現零件加工過程中的自動上下料。
工業機器人;自動上下料;CK4536數控車床;電氣控制改造
10.16621/j.cnki.issn1001-0599.2017.12.23
0 前言
隨著市場產品要求的多元化、個性化及高質量,生成企業人工成本增加、生產效率要求更高效,工業機器人作為智能制造中重要裝備,已成為中國工業自動化技術與應用的生力軍。當前在制造業向“智造業”轉型發展的大潮中,機器人是升級工廠、使之實現自動化和先進技術的核心,以機器人替代生產線工人勢在必行,也將有助于消除勞動力缺乏帶來的一系列問題。
1 HR20-1700-C10機器人和數控車床工作單元
1.1 HR20-1700-C10機器人
HR20-1700-C10機器人是江蘇匯博機器人有限公司基于埃夫特ER20-C10的基礎上開發的關節臂式機器人(圖1),其末端最大負載為20 kg,最大臂展為1700型,控制系統為C10。機器人工作空間的工作空間為:J1 軸±180°,J2 軸+65°~-145°,J3 軸+175°~-65°,J4 軸±180°,J5 軸±135°,J6 軸±360°,最大運動半徑1722mm。HR20-1700-C10機器人系統中設定了關節坐標系、世界坐標系和工具坐標系等3種坐標系。首次進入手動界面默認是關節坐標系,可對坐標系進行切換。機器人機械系統是指機械本體組成,機械本體由底座部分、大臂、小臂部分、手腕部件和本體管線部分組成,6個伺服電機驅動6個關節的運動來實現機器人不同的運動形式。只有機器人裝備了末端工具,并且連接到數控車床,組成一個系統以后,機器人才能實現自動上下料。
1.2 CK4536斜床身數控車床

圖1 HR20-1700-C10機器人外觀
CK4536斜床身數控車床是一種半閉環式的數控車床,是由機械設備與數控系統組成的使用于加工軸、盤類零件的高效自動化車床,數控車床能實現X和Z聯動控制,具有直線插補、圓弧插補各種補償功能,還具有各種加工固定循環、加工過程圖形顯示、人機話、故障自動診斷、離線編程、和計算機聯機進行計算機輔助制造,能進行復雜表面的加工。數控車床配備多工位刀塔,具有廣泛的加工藝性能,可實現軸類、盤類零件外內孔、端面、斜線圓柱、圓弧和各種螺紋、槽、蝸桿等復雜件加工,適用于批量加工。現結合HR20-1700-C10工業機器人進行自動上下料的實際改造應用。
2 數控車床及機器人自動上下料工作流程
機器人在數控車床加工時準確、及時地上下料,必須要克服以下困難:①加工工件在數控車床上的車削工藝流程;②合適的末端手爪;③規劃、編制運動程序;④機器人與數控車床聯動控制。
3 組合應用實例
3.1 綜合工件數控車削工藝分析
工件材料鋁合金,包含內外螺紋、內孔、外圓柱面、外圓錐面及端面等(圖2)。在數控車床上完成加工時,需要進行兩次裝夾。現以數控車床加工技術為基礎,結合工業機器人上下料技術的應用,以自動上下料的方式加工該工件,提高加工效率。
3.2 HR20-1700-C10工業機器人擴展功能
3.2.1 加工設備布置

圖2 加工零件
考慮實訓室設備布局緊湊性,機器人與數控車床采用一對一的安裝較為合適。設備布局與工作過程示意如圖3所示。
3.2.2 機器人末端工具設計
根據工件的外形結構及毛坯形狀特點,設計機器人末端執行器(手爪),該執行器由氣缸、傳感器及機械部件等構成(圖4)。其特點為底座和機器人的端部連接,底座安裝氣缸控制手爪松開、夾緊,安裝磁性開關檢測手爪的松開和夾緊到位狀態。手爪分別用于夾取毛坯、半成品或成品。

圖3 自動上下料工作過程示意
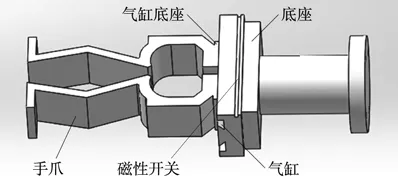
圖4 手爪部件
3.2.3 機器人與車床電氣線路連接
從硬件和軟件兩方面改造機器人和機床之間的控制,使之更好的協調機器人與數控車床的工作。硬件方面,機床采用華數集成PLC控制、機器人PLC為KeMotion系統控制,通過屏蔽電纜將兩控制系統間對應的輸入與輸出點進行連接。為實現機器人機床自動上下料系統安全高效運行,軟件方面在機床控制程序中增加機器人啟動、結束、安全門開關等信號控制,在機器人控制系統中通過屏蔽電纜,采集機床工作狀態、安全門控制狀態等信號,編寫機器人自動上下料的PLC控制程序,最終達到機床與機器人I/O有效通信。HR20-1700-C10機器人輸入及數控機床輸出信號對照關系如表1所示。機器人和數控機床工裝I/O接線見圖5,機床控制程序修改見圖6。
3.2.4 機器人上下料運動軌跡規劃
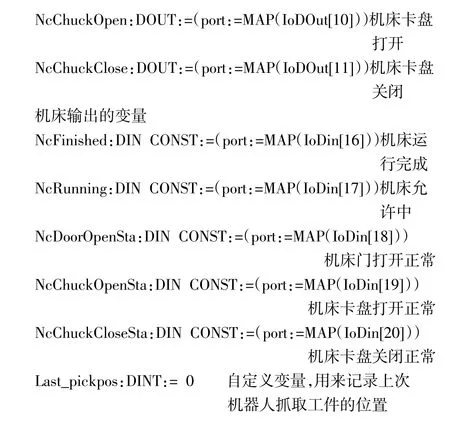
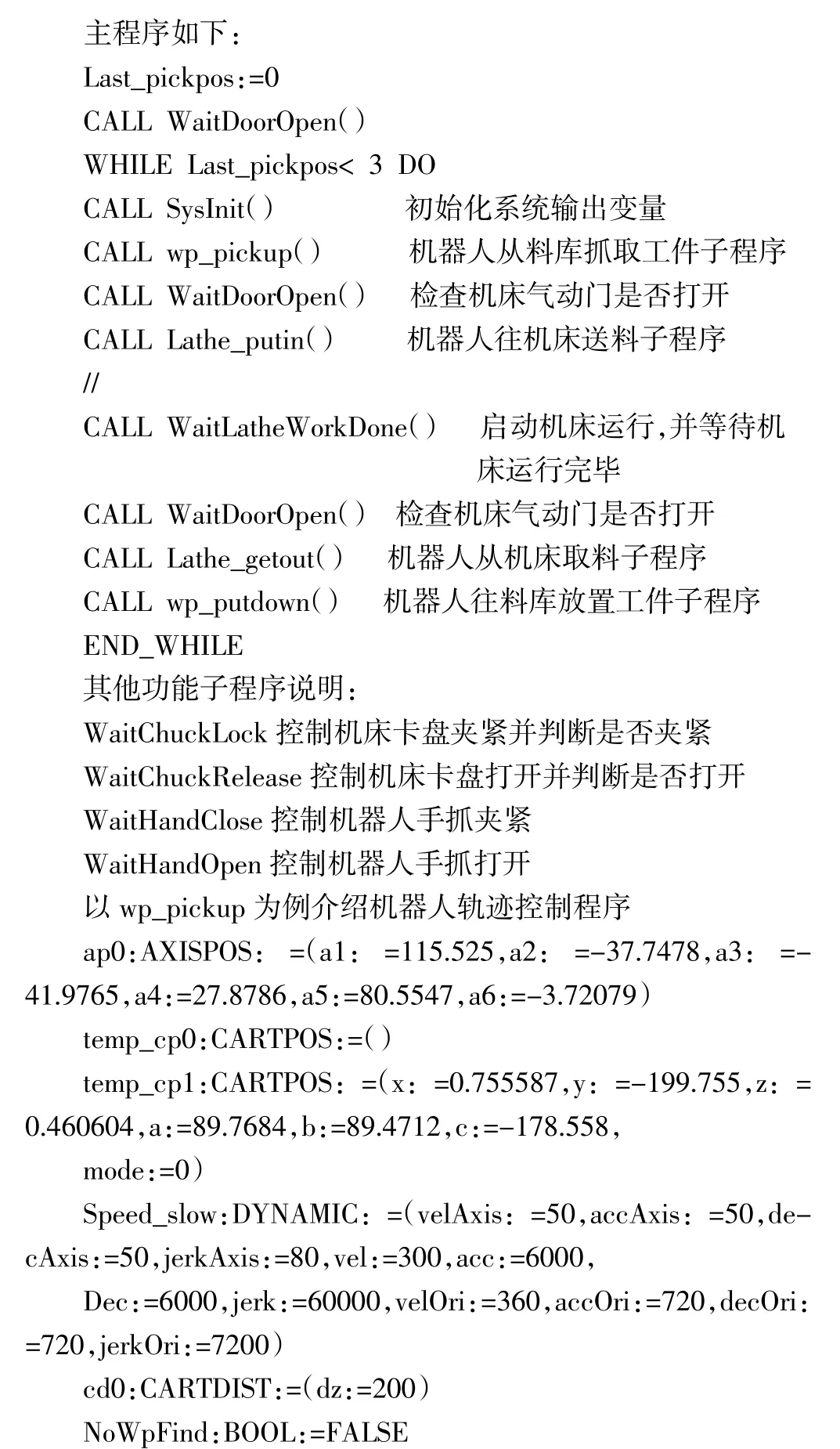
(1)運動軌跡規劃。規劃機器人上下料手爪運動路線(圖7)。(2)規劃設計手爪。根據毛坯及半成品規格尺寸,設計手爪。(3)機器人上下料程序編制。根據運行軌跡示意圖,編制機器人自動上下料控制程序。機器人程序變量如下。
機器人輸出的I/O變量
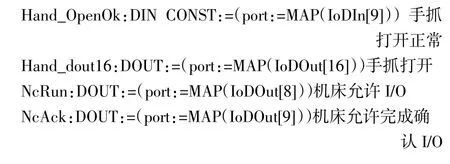
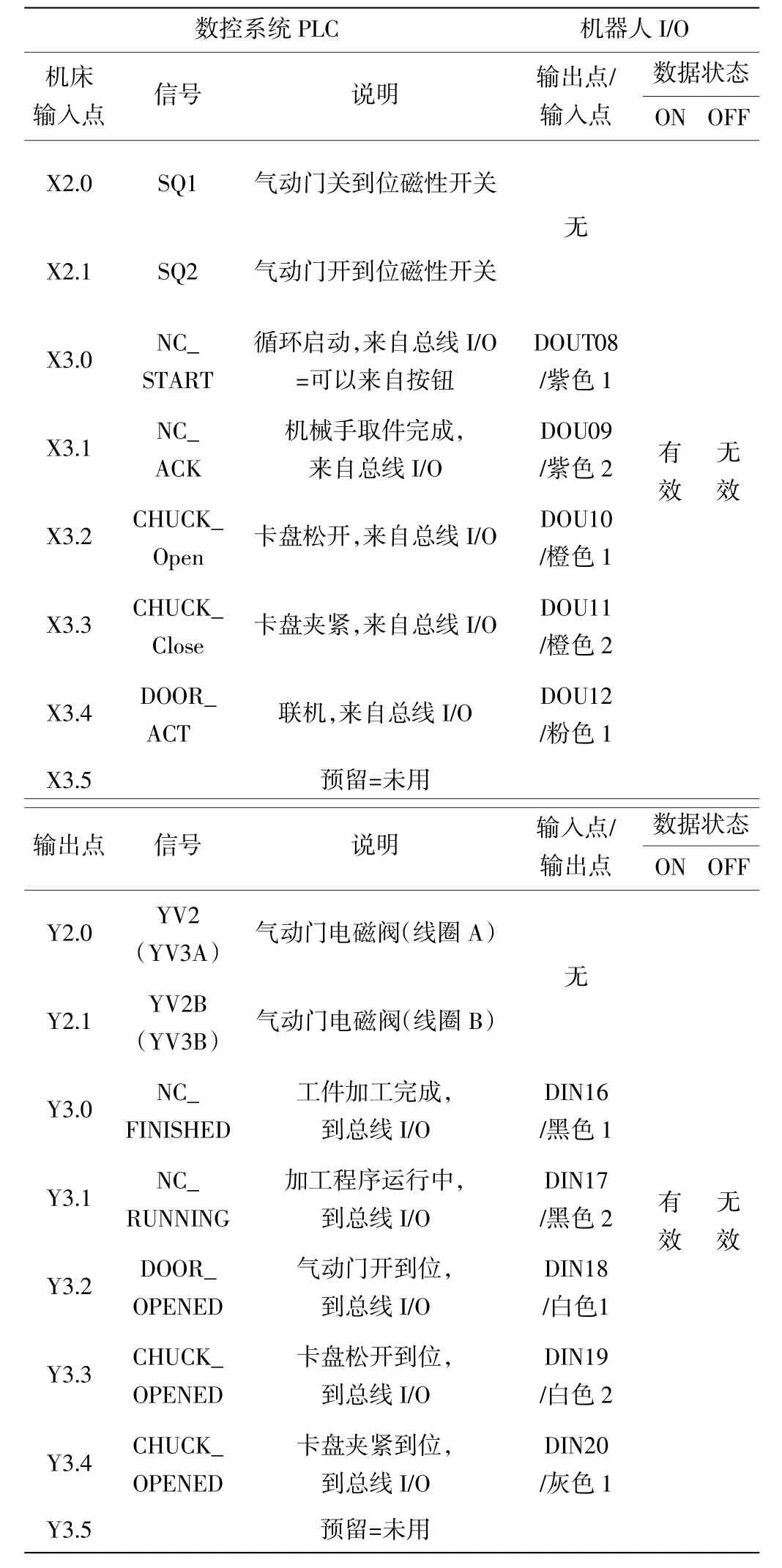
表1 HR20-1700-C10機器人與數控機床I/O信號對照
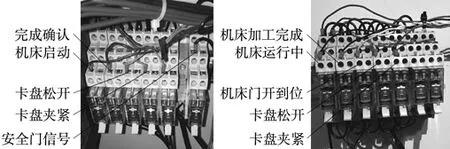
圖5 機器人和數控機床工裝I/O接線
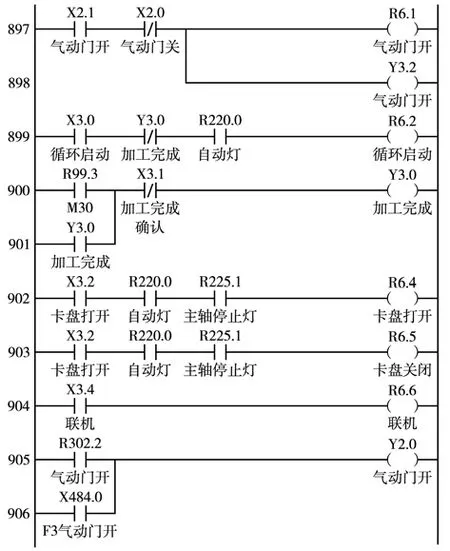
圖6 機床部分控制程序
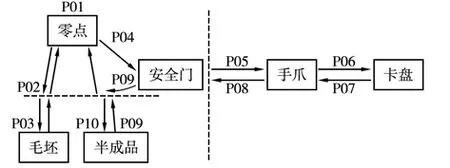
圖7 運動軌跡示意
4 結束語
機器人在斜床身數控車床中實現自動上下料控制,為實際加工中對工件輸送要求較高和定位要求精確的數控機床(特別是車削中心、加工中心和車銑中心)點位控制的發展和應用提供了一個解決方案,可以實現無人化、自動化以及智能制造的要求。該上下料系統配備在數控車床上,可滿足軸類零件上料和下料及碼垛需求。本次改造結合了機器人與數控機床的功能,數控機床操作的安全性得到了提高,勞動強度大幅降低,工件的自動上下料及自動加工連接更緊密,為后續的智能制造應用奠定了一定基礎。
[1]劉艷華,何高清,祖晅.柔性車削中心上下料機構設計和控制[J].組合機床與自動化加工技術,2012(7):96-98.
[2]王學良.機械手上下料控制系統關鍵技術研究[D].無錫:江南大學,2012.
[3]韓金利.華中8型系統數控PLC編程方法的研究[J].機械工程師,2013(9):93-95.
TG659
B
〔編輯 凌 瑞〕
猜你喜歡
裝備制造技術(2020年4期)2020-12-25 05:26:22
制造技術與機床(2019年12期)2020-01-06 03:17:48
制造技術與機床(2017年6期)2018-01-19 02:41:24
制造技術與機床(2017年4期)2017-06-22 11:18:05
制造技術與機床(2017年2期)2017-05-04 04:17:34
現代工業經濟和信息化(2016年12期)2016-05-17 05:37:48
制造技術與機床(2015年10期)2015-04-09 07:06:08
制造技術與機床(2015年10期)2015-04-09 07:05:42
裝備機械(2015年1期)2015-02-28 22:19:52
組合機床與自動化加工技術(2014年9期)2014-03-01 02:21:42