FANUC系統參數在生產質量方面的實踐和應用
2018-01-03 05:46:06王路暐
設備管理與維修 2017年12期
關鍵詞:系統
王路暐
(上汽通用五菱汽車股份有限公司,廣西柳州 545007)
FANUC系統參數在生產質量方面的實踐和應用
王路暐
(上汽通用五菱汽車股份有限公司,廣西柳州 545007)
深孔剛性攻絲斷刀回退;孔位置度超差的補償;伺服增益的相關參數;圓弧拐內角倍率與進給速度相關的參數。FANUC系統參數的使用實踐。
FANUC 系統;參數;加工節拍
10.16621/j.cnki.issn1001-0599.2017.12.18
0 引言
FANUC系統參數中有部分的參數是關于設備的機械性能、伺服系統、NC加工設置,其中和加工相關系的有剛性攻絲,刀具補償,螺距誤差補償,伺服增益相關參數,圓弧拐內角倍率設置,進給速度的參數。這些參數和現場設備的加工節拍、加工質量密切相關,需要研究掌握參數在不同的加工條件下的調整方法,以滿足生產的節拍和質量需求。
目前,廠里使用了FANUC18i和FANUC31i系統,2個版本關于系統參數的設置和含義基本相通。那么根據0i系統的參數含義,可以部分了解到機床設置參數的調整方法和調整范圍,經過近10 a的FANUC系統使用,工廠已經積累了關于絲杠磨損的參數補償、伺服增益的相關參數設置等經驗,但是在剛性攻絲、螺距武昌補償方面經驗不足,需要更長時間的摸索跟蹤和實踐。將現場出現的一些質量和生產節拍問題,敘述系統參數的補償和調整過程以及達到質量和節拍合格的案例。
1 深孔剛性攻絲斷刀回退
掌握數控系統作深孔剛性攻絲時,處理攻絲斷刀情況,對防止損壞工件、機床。剛性攻絲攻螺紋在主軸旋轉中,Z軸的進給總量與絲錐的螺距持平等同。即P(絲錐螺距,mm)=F(Z軸送給量/S,mm/min)/S(主軸轉速,r/min)
從實踐來講,上述涉及的FANUC系統參數如主軸的轉速、Z軸的進給、攻螺紋功能在滿足各項性能參數中,受各自獨立執行加、減速的基本條件滿足運轉,然而現實情況是并不能滿足公式的動力需求。而從系統改良方面,用于滿足公式運轉,就有必要借鑒裝在攻絲夾頭內部的彈簧對送給量進行補償,而通過這種補償,整體實現且順利以攻螺紋的精度滿足了回退需求。
剛性攻絲的運行機理,是通過同步控制控制主軸的旋轉和Z軸的進給來保證精度。在系統性的運行策略和方法中,最大限度的變成位置系統運行。主軸在執行該系統操作時,通過對主軸旋轉的速度控制、位置控制和實現對主要旋轉和鉆孔軸的進給直線插補。深孔剛性攻絲斷刀回退,依托滿足P=F/S的條件,來確保生產質量的整體提高。攻絲的螺距可以直接指定。剛性攻絲可以通過的指令完成,如:M29S***。
在缸蓋的MAG設備CNC上,一個工位頻繁出現絲錐斷刀的情況,在排查了絲錐刀具的問題、主軸振動、絲杠磨損造成的振動、夾具未將工件夾緊、刀具的冷卻壓力和排屑,以及刀具的主軸轉速設置等問題后,通過檢查系統參數中關于剛性攻絲的部分,發現了絲錐在退刀的速度倍率上的設置出現問題,將退刀倍率改為100,單位為%后,絲錐未再出現斷刀的情況,原來的設置為56%,這樣造成了Z軸退出速度和主軸的旋轉速度不匹配,絲錐被頻繁拉斷。
2 孔位置度超差的補償
數控機床的工藝流程優化中,通過對直線軸精度的調整和改良,滿足對基本輕度的位置定位和速度控制。其中把握關鍵節點(反向間隙 、定位精度、重復定位精度)機械位置的調整,尤其是對直線軸傳動鏈中滾珠絲杠的螺距制造精度。數控機床生產制造及加工中,為實現生產質量的整體提高,實施必要且準確的定位系統節約成本最有效的方法除了對關鍵節點的調整外,應用數控系統的螺距誤差補償功能,對機床反向間隙、重復定位精度之間的誤差進行消解。廠里使用FANUC18i和FANUC31i版本的2種系統,通過對螺距補償量、CNC移動指令、伺服軸的移動量、補償絲杠的螺距誤差等各個監測點的重點監測外,還借助相關檢驗儀器進行深度監測,最大限度提升了生產質量,避免了孔位置度超差造成的質量問題。
3 伺服增益的相關參數
伺服系統(Servo Mechanism System)以機械運動的驅動設備為控制對象,以控制器為核心,以電力電子功率變換裝置為執行機構,實現了生產中適時的信心反饋。伺服增益的相關參數研究中,各控制單元和子單元之間,形成了相應的系統性原則控制和必要的偏差及其震動。伺服增益的相關參數中,通過對伺服3個反饋系統環的調整,實現對主參數如位置環增益、速度環增益、速度積分時間常數的全權調控,在恰當的調整中,各參數對整體生產質量的提高,主要突出表現在指令位置跟隨性參數、工件表面優劣、驅動器工作在位置方式上的有效性,并通過增加位置環比例增益,以鎖機力度(提高伺服電機的剛性),取得系統運行效果。同樣的,在位置環的整體精度改善中,相應的時間調整和循環調整,實現速度環的整體增益。CNC系統如圖1所示。
3.1 特點
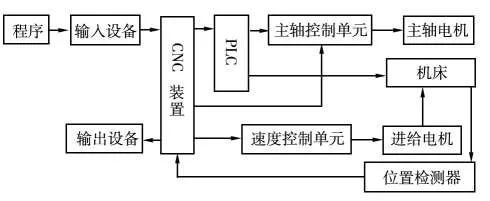
圖1 CNC系統框圖
位置比例增益(借助位置環)參數KP的條件,是實現系統改良的先決條件,從運作機理來看,當KP值增大時(剛性較硬),伺服電機對位置脈沖指令有較好的響應;同樣的,當位置環比例超出時,相應的震動和噪音,也造成了伺服電機啟動過程中不穩定狀態存在的根源。
廠里使用的FANUC18i和FANUC31i版本的2種系統,可保證位置環系統穩定工作,滿足位置伺服增益且避免減小位置滯后量。在自動化場景運行中,通過先提高位置環增益直至過沖,后降低位置環增益的調整機理,實現了運行參數和運行常數對位置環所起的作用。為提升主控制單元的調整時間,實現對各控制單元和子單元之間,形成了相應的系統性原則控制和必要的偏差及其震動的合理調控,在直接程度上實現以伺服電電機穩態速度誤差的大小及速度環系統的穩定性要求。在實際的數控機床的生產研究中,通過實際負載轉矩和負載慣量與缺省參數值設置時的相符率,進行調整,并最大、大限速的滿足速度帶寬需求,避免發生電機速度爬行或振蕩等現象。通過對對速度環的比例增益、積分時間常數進行調整來達到理想的速度環帶寬需要。
3.2 速度環參數與積分時間常數的調整策略原則
參數的調整,除了滿足系統穩定性需求外,還要確保在不振蕩的前提下,使速度環響應最快。最直接有效的方法就是通過度較好速度環比例增益,來調整速度環,具體來講就是對速度環的先震蕩后降低原則。換言之,速度環積分時間常數調整是伺服系統來說為延遲因素。設置中除避免設定過大延長定位時間(導致相應能力差)的缺點外,還要以具體運行狀態實現對定位偏差脈沖的振動狀態調整,尤其確保機械設備性能在短期內耗費較短的穩定狀態時間來保證生產。
速度環積分時間常數調整的基本原則,通過對載慣量、電機軸上值、電機轉子慣量的倍數關系的折算和相應的時間常數的正相關關系研究。在相應的狀態調整和穩定性能研究中,參數的負載,在實際的生產質量管理中,依據FANUC18i和FANUC31i系統參數中,相應的伺服增益及其速度環比例增益和相應時間,最終獲得最短時間的最佳運行效率。
4 圓弧拐內角倍率
圓弧拐內角倍率可以改善出現的暗紋情況。
5 與進給速度相關的參數
直線插補、螺旋插補等的進給速度設置,影響加工節拍,各個軸的快速進給的直線加減速時間常數和鈴形加減速時間常數設置過大,造成超節拍 超差,在系統參數1620和1621的設置中,可以通過調整鈴型加減速時間常數,調整節拍加工時間。保持生產線統一的節拍時間。
TG695
B
〔編輯 利 文〕
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32