基于Pro/E的小型挖掘機建模及仿真分析
2018-01-03 05:46:05魯記偉吳國新
設備管理與維修 2017年12期
魯記偉,吳國新
(北京信息科技大學現代測控技術教育部重點實驗室,北京 100192)
基于Pro/E的小型挖掘機建模及仿真分析
魯記偉,吳國新
(北京信息科技大學現代測控技術教育部重點實驗室,北京 100192)
基于Pro/E建模的高效率性,對小型挖掘機進行機械手臂實體建模及其運動仿真分析。整機的結構組成與工作原理;機械手臂處于工況時的運動學分析;挖掘機的裝配約束,還有仿真參數的設置方法即單一變量法;通過運動仿真,分析機構運動時的缺陷并進行運動參數的優化,從而改善運動效果。
Pro/E;挖掘機;運動仿真分析;運動優化
10.16621/j.cnki.issn1001-0599.2017.12.13
0 引言
挖掘機是一種有特殊功用的工程車輛,主要由鏟斗、機車回轉裝置、機車底盤以及機械手臂等組成,一般靠履帶或車輪行進。由于它造型特別,人們對它有多種叫法,如挖土機、大爪車、斗車等。在工程建設中挖掘機有不可替代的作用,幾乎每個工地上都會用到,這也說明挖掘機的發展速度很快[1]。
Pro/E這款軟件最大的特點就是建模參數化,這使得建模效率大大提高,而且軟件的運用范圍更加廣泛。特別是在新產品開發階段,可以運用參數化的功能快速高效率建模,從而保證產品各方面參數的一致性,提高產品的質量。當用戶者把新的零件開發出來后,如果有些尺寸不合理,用戶可以直接在原圖上修改零件的尺寸,來滿足設計的要求。另外Pro/E的建模都是實體性質的參數,用戶每一項參數的設置都有一定實際意義,比如零件的質量、體積、表面積等,用戶可以參考零件的質量或體積來構造零件的外形。
基于Pro/E建模的高效率性,對小型挖掘機進行簡單的三維建模,并對機械手臂運動進行仿真,使其完成預想軌跡:斗桿和動臂一起運動以實現挖掘工作,將動臂向上抬起同時斗桿附加轉動,以保持鏟斗處于水平位置,然后機車車身回轉,斗桿和鏟斗同時轉動,以實現卸土的工作,最后機車回轉車身旋轉至最初位置。
1 挖掘機分類及其工作原理
挖掘機按照不同的分類方式有許多不同類型(表1)。挖掘機按驅動力的不同可分為電驅動和柴油燃機驅動,其中電驅動挖掘機大部分應用在發生火災或壓強高的地方。
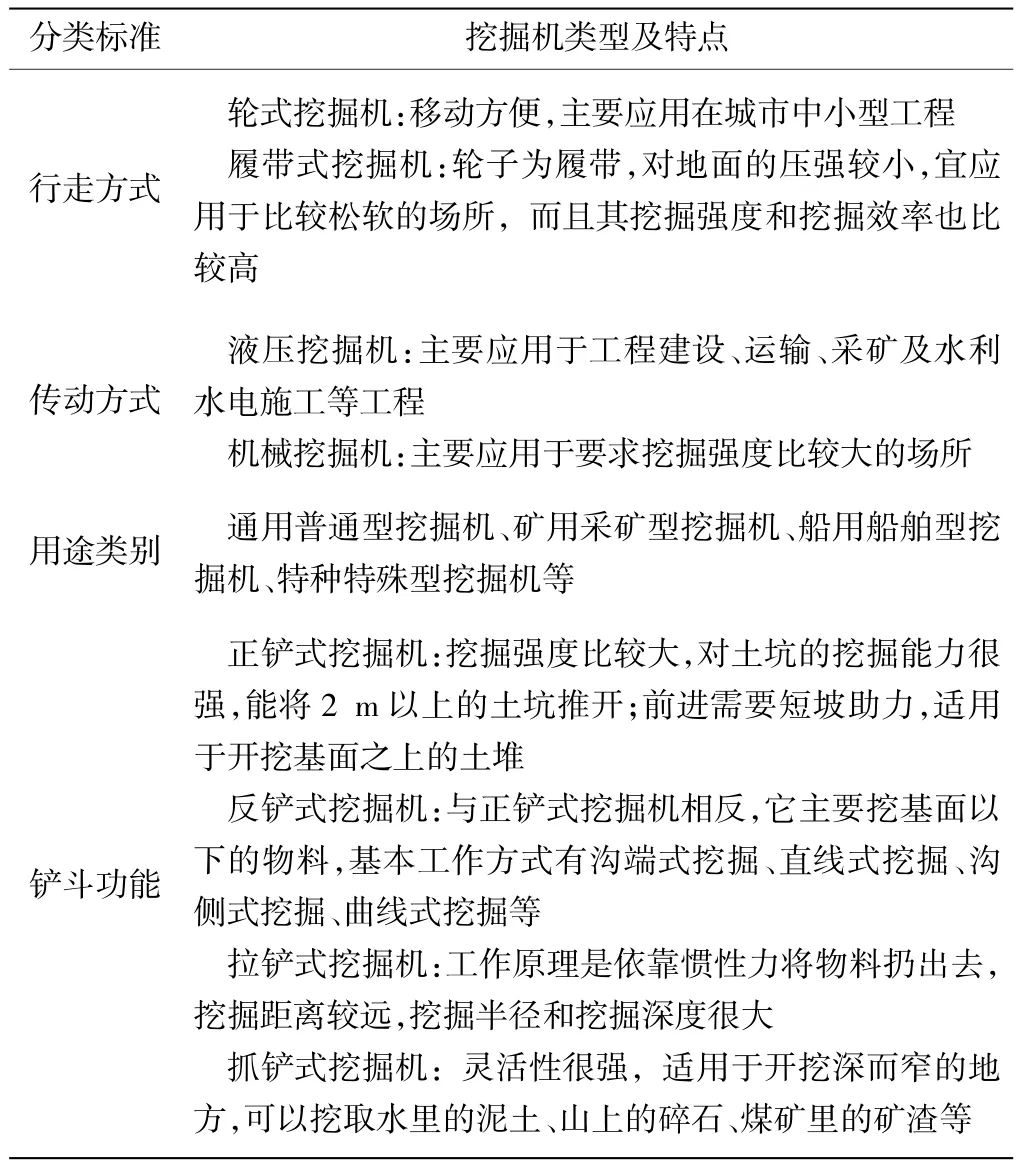
表1 挖掘機的分類
1.1 挖掘機的結構組成
液壓挖掘機機身主要是由動力傳動機構、行走機構、工作裝置、回轉裝置、液壓系統和輔助機構等組成[2]。
動力傳動機構的作用:挖掘機通過內燃機把柴油自身的化學能轉化為機車的機械能,再通過液壓系統由柱塞泵將機車的機械能轉化為液壓油的壓力能,再通過電液一體化將其能運送至各個機構零件,然后各個機構零件再將之轉化為機車的機械能。
行走機構用來完成機車車身的行走并支撐機車整機的質量,它由車架、支重輪、托鏈輪、導向輪、張緊裝置、車輪履帶、行走機構、回轉接頭等組成,構造類型多采用履帶轉動和輪胎轉動。
工作裝置是挖掘機整機之中最重要的一部分。由動臂、動臂液壓缸、動臂液壓缸活塞桿、斗桿、斗桿液壓缸、斗桿液壓缸活塞桿、鏟斗、鏟斗液壓缸、鏟斗液壓缸活塞桿、搖桿、連桿等組成,可以讓挖掘機完成挖掘、起重、旋轉、卸料等多種不同功能(圖1)。

圖1 挖掘機運動手臂
回轉裝置由回轉操作平臺、動力系統、液壓傳動系統、伺服操縱系統、電器系統、空調系統、司機駕駛室等組成[7]。它控制挖掘機的挖掘方向,使挖掘機向左或向右回轉,完成挖掘、旋轉、卸料。
1.2 挖掘機工作原理及工況
挖掘機是通過內燃機將柴油的化學能轉化為機車的機械能,再由液壓系統將機械能轉化為液壓油液的液壓能,再通過液壓泵將油液的壓力能運送至各個機車執行部件,如機車液壓油缸與搖桿的配合、機車轉動機構與減速器的配合,再由液壓泵將液壓油液的壓力能轉化為機車的機械能,從而實現機車整機的運動。
液壓挖掘機工作過程可以分為3種情況:①單鏟斗挖掘。斗桿和動臂都靜止,通過鏟斗7與斗桿4的轉動來實現挖掘工作,最大挖掘范圍和挖掘力則由鏟斗液壓缸來決定。②單斗桿挖掘。動臂靜止,而由斗桿與動臂之間的轉動來實現挖掘工作,挖掘能力則由斗桿液壓缸決定。③雙聯合挖掘。由斗桿液壓缸和鏟斗液壓缸一起運動進行挖掘,挖掘能力由這2個液壓缸同時決定。
2 挖掘機手臂運動學分析
挖掘機機械手臂部分主要由動臂AF,斗桿FK,鏟斗KM,動臂液壓缸BC,斗桿液壓缸DE,鏟斗液壓缸JH,搖桿HI,連桿HL組成(圖2)。由于把動臂液壓缸和動臂液壓缸活塞桿看成了一體,所以整個裝置共有11個活動構件。由平面機構自由度計算公式(1)得[6]:

圖2 挖掘機機構示意

式中 F——平面機構自由度
N——活動構件數
PL———機構中低副數目
PH——機構中高副數目
P———虛約束
P1———局部自由度
計算后得自由度為3,所以需要3個液壓缸作為動力,以保證手臂的正常運轉。
令動臂液壓缸的長度為L1,斗桿液壓缸的長度為L2,鏟斗液壓缸的長度為L3。
動臂的擺動范圍β見式(2)。
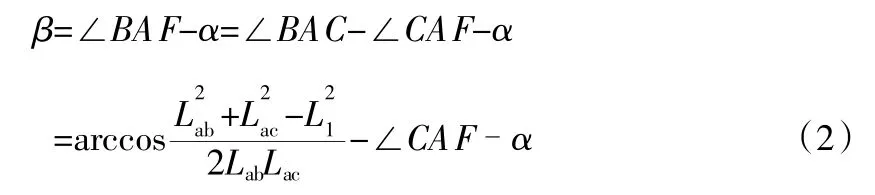
因為Lab和Lac以及∠CAF,α都為已知量,所以β將由動臂液壓缸的長度為L1唯一確定。
斗桿FK的擺動范圍γ見式(3)。

因Ldf和Lef以及∠AFD,∠EFK都為已知量,所以β將由動臂液壓缸的長度L2確定。鏟斗的擺動范圍δ=360°-∠FKI-∠IKH-∠HKL-∠LKM。其中,∠FKI和∠LKM由機構參數決定為定值。
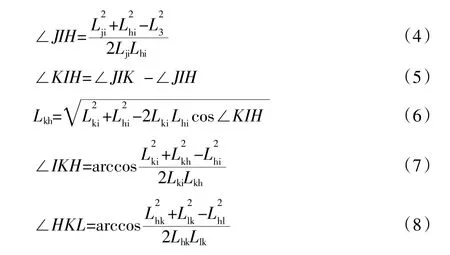
聯立式(4),式(5),式(6)和式(7)即可求出∠IKH。聯立式(6)、式(8)可求出∠HKL,即可求出鏟斗的擺動范圍 δ,且只與鏟斗液壓缸的長度L3有關。
3 整機建模裝配及其運動仿真分析
建立各個部件三維模型后進行組件裝配:將機車底盤添加進裝配體,選擇缺省約束類型,然后依次將輪胎、機車回轉車身、動臂、斗桿、鏟斗調入機車底盤裝配體中,并定義約束類型為銷釘,再將活塞缸和搖桿依次調入;由于活塞桿與搖桿之間要產生空間滑動,所以定義為圓柱連接,活塞缸和搖桿與機車銷釘連接;連接構件分別為機車底盤與車輪輪胎、機車底盤與機車回轉車身、動臂與機車回轉車身、動臂與斗桿、鏟斗與斗桿、活塞缸與搖桿、活塞缸與機車體、搖桿與機車體。其中,除活塞缸與搖桿為圓柱連接外,其他均為銷釘連接。
仿真預想軌跡:斗桿和動臂一起運動以實現挖掘工作,將動臂向上抬起同時斗桿附加轉動,以保持鏟斗處于水平位置,然后機車車身回轉,斗桿和鏟斗同時轉動,實現卸土工作,最后機車回轉車身旋轉至最初位置。
電機位置的確定:點擊定義伺服電機功能鍵,選取動臂與機車轉軸命名為servomotor1,點擊輪廓設置參數,規范設置為速度,定義模為2,然后點擊運用。以同樣的方法設置其余電機,機車總體設置9個電機。
由于電機數目較多,同時設置每一個電機的運動時間,可能會達不到預期效果,所以采用了單一變量法的設置方式完成了機車整體的仿真。即其余電機不轉,而只讓一個電機轉動,觀察運動件的運動范圍。依此方法運用于其他電機上,記錄下每一個零件的運動時間,然后算出整個仿真所用的總時間,再以總時間為總體分配給各個分解運動所需時間,這樣就能精確仿真出挖掘機的預期運動。手臂運行流程如圖3所示。
通過仿真,基本實現了預想的運動軌跡,利用Pro/E對動臂與底座回轉裝置之間的銷釘進行運動分析。由于銷釘與動臂之間為固態連接,所以其轉動角度也為動臂的轉動角度。
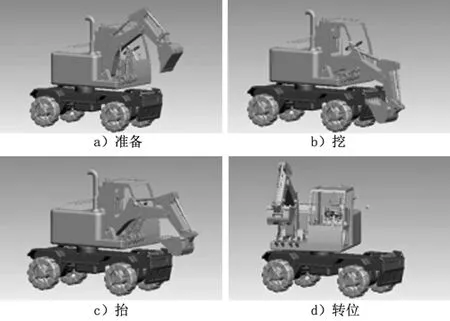
圖3 手臂運行流程
對動臂與底座回轉裝置之間的銷釘進行真實工況下的運動分析,其中橫軸代表時間,縱軸代表轉角轉速(圖4)。可以發現,大約在30 s和84 s時圖4a轉角轉速的突變,這也符合挖掘機真實作業情況下動臂的運動情況,基于手臂在挖掘工作過程中的多變性,對其運動連接點進行速度優化,以降低速度連接點之間產生的加速度,從而改善手臂運動的靈活性。圖4b是采用二次速度曲線分別對仿真過程中30 s和84 s時產生的角加速度進行的優化,其角加速度明顯改善。

圖4 優化前后的轉速對比
4 結語
通過Pro/E對挖掘機進行簡單的三維建模,并對手臂的工況進行運動仿真,觀測各個部件的運動參數變化情況,對于有加速度的地方,通過優化運動參數,降低各部件的加速度,從而改善了挖掘機的工作情況,為對真實挖掘機運動參數的優化提供了基礎。
[1]趙燕玲,張怡.液壓挖掘機運動軌跡研究[J].現代商貿工業,2011(22):338-339.
[2]徐素霞,文學沫.基于Pro/E的挖掘機虛擬樣機建模及運動學仿真[J].裝備制造技術,2012(7):282-285.
[3]徐兵,朱曉軍,劉偉.挖掘機工作裝置運動學建模與仿真[J].機床與液壓,2011,39(9):97-99.
[4]魏永泉,藍兆輝.挖掘機工作裝置逆運動學分析的桿組方法和運動規劃[J].機械傳動,2013(4):10-14.
[5]王久聰,李慶毅.挖掘機鏟斗機構參數的試驗優化[J].機械設計與制造,2013(4):34-37.
[6]呂其惠,王力夫.液壓挖掘機工作裝置智能化控制的設計與研究[J].現代制造工程,2007(4):107-109.
[7]毛坤朋.機械式、液壓式挖掘機挖掘軌跡與五桿機構實現軌跡的對比[J].化工技術與開發,2013(11):73-76.
TH113.2
B
〔編輯 吳建卿〕
重點實驗室開放課題:KF20171123204,國家高技術研究發展計劃(2015AA043702),國家自然科學基金資助項目51275052。