基于AR-HUD的汽車駕駛輔助系統設計研究*
2018-01-02 10:10:33鄭楊碩
武漢理工大學學報(交通科學與工程版) 2017年6期
李 卓 周 曉 鄭楊碩
(武漢理工大學汽車工程學院 武漢 430070)
基于AR-HUD的汽車駕駛輔助系統設計研究*
李 卓 周 曉 鄭楊碩
(武漢理工大學汽車工程學院 武漢 430070)
為改善駕駛員的駕駛分心和認知負荷,提出融入增強現實的抬頭顯示駕駛輔助系統原型,通過不同可見度條件下的駕駛員危險認知行為測試、語義差異法和口語分析法,從客觀與主觀,定性與定量兩方面對該系統的有效性進行評價.結果表明,在低可見度條件下,AR-HUD系統可顯著提高駕駛員對危險情景的反應時間.實驗結果部分驗證了AR-HUD系統原型的有效性.
AR-HUD;視覺符號;危險認知行為;評價量表
0 引 言
車載信息系統豐富了駕駛員的駕駛體驗,由車內次級任務引起的駕駛分心也嚴重影響了駕駛員的駕駛效能和交通安全.為減少駕駛員的視覺分心,汽車廠商將抬頭顯示技術(HUD)應用到車上[1-3].與傳統的儀表盤顯示相比,HUD將車況、路況和外界環境等信息直接投射到擋風玻璃上,減少駕駛員因低頭而導致的駕駛分心,提高駕駛安全.據統計,HUD可以降低25%車輛碰撞[4].
增強現實技術(AR)是在虛擬現實技術(VR)基礎上發展起來的一種新型的人機交互技術,它能將計算機生成的虛擬對象與真實環境場景相融合,提供虛實結合的增強現實場景[5].AR與HUD結合,可以將識別到的駕駛安全警示信息直接投影到前擋風玻璃上,與真實的道路環境相融合,在提高駕駛體驗的同時,也降低了駕駛員的認知負荷,提高危險認知能力.由于其不切斷真實駕駛情景、虛實結合、實時交互的特點,將對未來汽車輔助駕駛、車載娛樂、導航的發展起到了強大的驅動作用.
1 AR-HUD 系統原型
1.1 目標識別
AR-HUD系統開始于對前方障礙物的識別,包括前方的車輛、行人、交通信號、車道等.本系統采用毫米波雷達與CCD攝像機相結合的方法,對前方障礙物進行精確檢測[6].其流程見圖1.
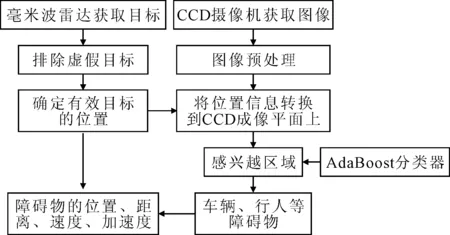
圖1 流程圖
毫米波雷達獲取的前方有效目標信息與CCD圖像傳感器攝像機獲取的CCD圖像信息相融合,并劃分出可能的障礙物區域,即感興趣區域.利用Adaboost算法訓練得到級聯分類器,對感興趣區域的障礙物進行精確的識別.
1.2 信息組織
如果將AR-HUD系統識別到的信息全部投影到駕駛視野中,不但不會減少駕駛員的駕駛分心,反而會干擾真實的駕駛環境,造成更為嚴重的認知負荷.因此,需要對系統識別的信息進行有效的篩選.
文中AR-HUD系統主要由碰撞警示信息和導航信息兩部分組成.根據國際標準化組織ISO制定的前碰撞告警系統的標準和評價規程ISO 15623,碰撞警示信息主要包括前碰撞警示、車輛并道警示、轉彎碰撞警示以及前方行人和非機動車警示.另一方面,系統將CCD圖像與GPS導航系統的導航信息相匹配,將轉彎、變道、車道偏離的提示信息實時投影到道路環境中.
1.3 視覺設計
AR-HUD系統呈現的警示信息需要以視覺符號的形式呈現在駕駛員視野中.按照危險等級的不同,AR-HUD系統被分為預備碰撞告警和碰撞告警兩種危險情景.在視覺設計的過程中,需要分別考慮兩種情景下視覺符號的形狀、顏色、位置、亮度以及顯示間隔,既要能夠引起駕駛員充分的注意,又不能干擾真實的駕駛環境,產生額外的駕駛分心[7-8].
AR-HUD系統界面在不同駕駛情景下的視覺符號見表1.其中預備碰撞告警采用黃色持續警示,碰撞告警采用紅色閃爍警示,導航信息采用綠色持續警示.
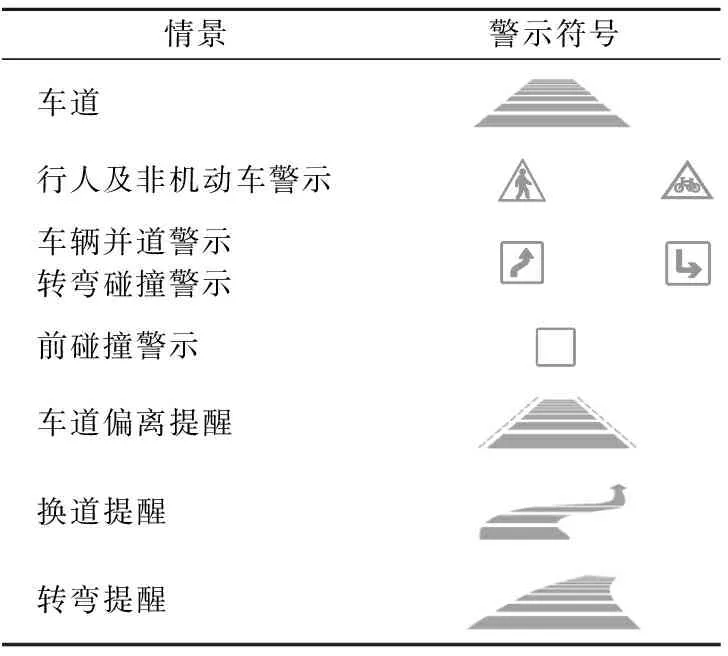
表1 AR-HUD系統視覺符號
1.4 三維注冊
為了使AR-HUD系統提供的不同駕駛情景的視覺符號與駕駛員視野相匹配,需要將CCD圖像的坐標系統與駕駛員坐標系統相匹配,這個過程被稱為三維注冊[9].通過提取CCD圖像和駕駛員視野圖像中的特征點,利用自動匹配方法SIFT/SURF算法匹配這些對應的特征點,以提取共軛點.最后,應用全息投影變換將所提供的駕駛安全輔助信息投影到駕駛員視野中.
1.5 虛實融合
經過目標識別,信息篩選,視覺符號生成以及三維注冊,AR-HUD系統所提供的駕駛安全輔助信息被投影到駕駛員視野中.投影到前擋風玻璃上的信息需要保證日間亮度充足,夜間亮度不刺眼.圖2為系統的界面原型.這些圖片是由駕駛員座椅前方的攝像機拍攝所得.

圖2 AR-HUD系統界面
該AR-HUD系統的目的是為了減少駕駛員的駕駛分心和認知負荷,提高駕駛安全性.為驗證該系統的有效性,通過設計實驗來評估在不同的可見度情景下,AR-HUD系統對駕駛員危險認知反應行為的影響.
2 實 驗
2.1 參與者
被試者是從武漢市隨機選取的30名駕駛員,其中男性18名,女性12名.被試者被隨機分配為兩組:AR-HUD組和對照組.
被試者的平均年齡、駕齡,以及累積駕駛里程見表2.單因素方差分析(ANOVA)的結果顯示,兩組數據無統計上的顯著差異.
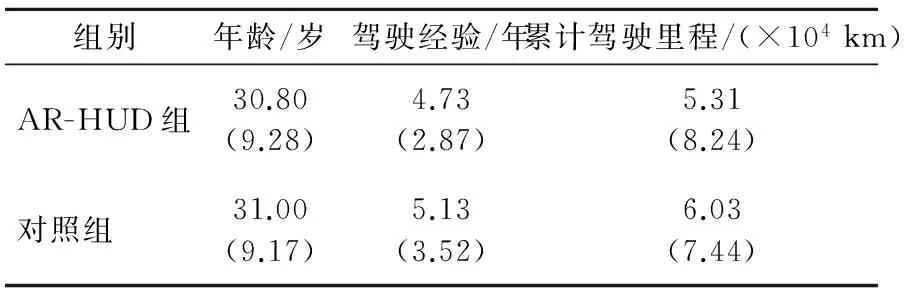
表2 被試者的年齡、駕齡和累積駕駛里程
2.2 實驗準備
實驗采用動態視頻法評估AR-HUD系統對駕駛員典型危險情景認知反應行為的影響.以駕駛員的視角,分別在不同人流密度和交通密度的市區街道和周邊公路,拍攝了多組動態交通視頻.視頻包括日間和夜間兩種不同可見度情景.結合文獻[4]提出地開發駕駛員危險知覺測試的五原則和交通安全領域相關專家的建議,對視頻進行篩選和剪輯,最終篩選出10段典型危險情景視頻片段和一段包含AR-HUD系統全部警示信息的練習視頻.危險情景視頻持續時間在15~20 s之間,練習視頻持續80 s.10段典型危險情景視頻均包含一個潛在的道路危險.具體為:日間和夜間駕駛環境下的追尾,前車變道,側撞,行人以及易受傷害的非機動車.
實驗設備見圖3,被試者被要求坐在模擬駕駛器的前方,距離前方80 cm有一個前擋風玻璃.投影儀1將視頻片段投影到最前方的屏幕上,投影儀2將AR-HUD系統提供的警示信息投影到前擋風玻璃上,攝像機被用來追蹤駕駛員的視野.
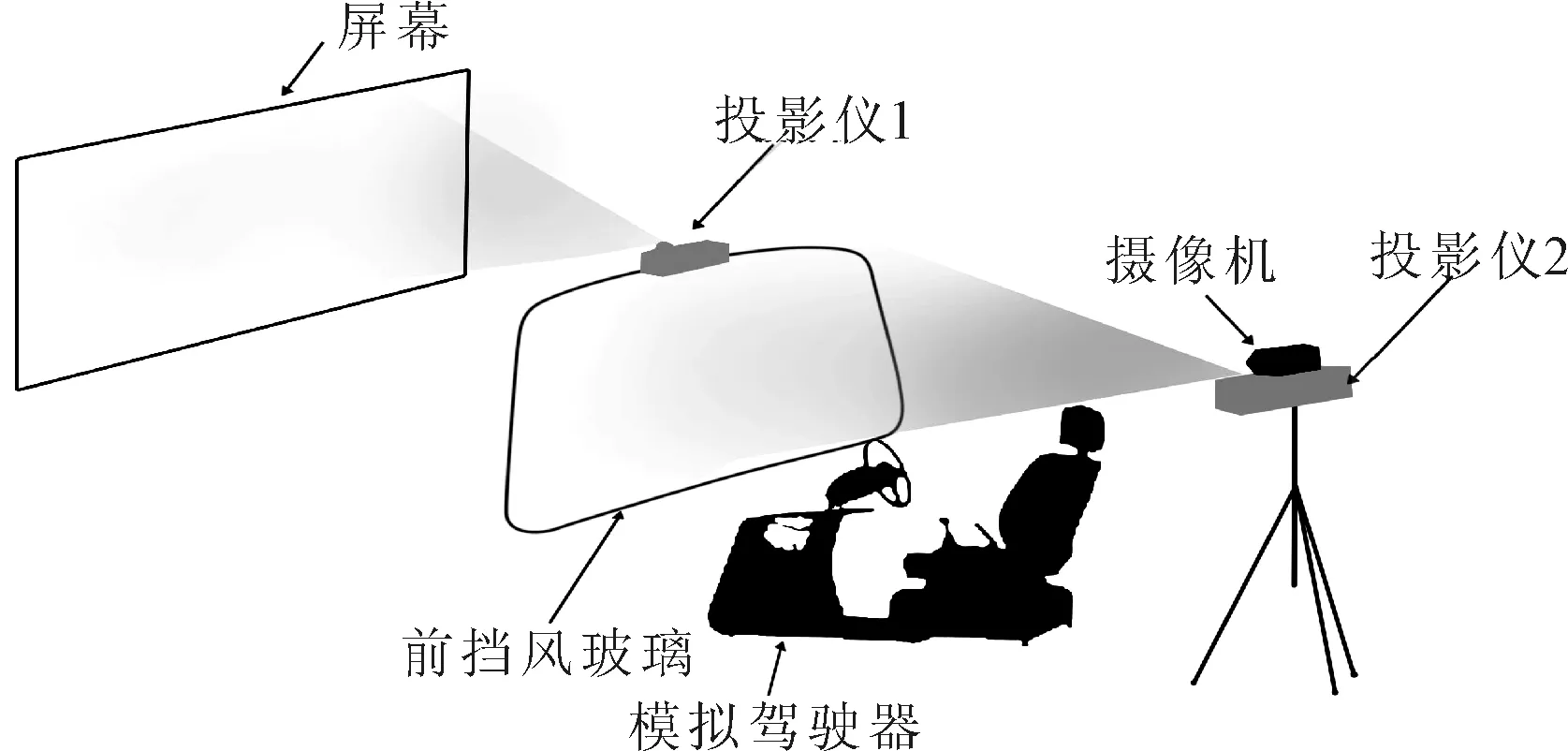
圖3 實驗設備
在正式實驗前,所有被試者將被要求進行一個簡單反應時測試.其測試結果見表3.由表3可知,兩組數據無統計上的顯著差異.

表3 被試者的平均反應時間
2.3 實驗
實驗之初,兩組被試者被要求觀看一段包含AR-HUD系統全部警示信息的視頻,以對實驗目的、AR-HUD系統界面各視覺符號的含義有所了解.隨后,進行駕駛員危險認知行為的測試實驗.
實驗假設AR-HUD系統界面能夠有效的幫助駕駛員提高危險情景的反應時間,因此通過記錄兩組被試者發現視頻中交通沖突的時間來驗證假設.在視頻片段的播放過程時,被試者被要求觀察視頻中的駕駛情景,當發現視頻中的交通沖突時,踩下模擬駕駛器的剎車踏板,并描述此交通沖突.將交通沖突定義為駕駛員預測到前方其他道路使用者的行為可能會引發危險,采取必要的安全措施以避免發生交通事故.實驗人員記錄被試者的反應時間以及對交通沖突描述的口語報告.隨后,AR-HUD組的被試者被要求完成一份對AR-HUD系統界面有效性的評價量表.評價量表的設計采用Likert量表法,對AR-HUD系統界面原型的有效性、干擾性及可靠性性進行評估,其評價指標分類及對應問題見表4.評價量表由7個等級組成,1代表完全不同意,7代表完全同意.

表4 評價量表
3 分析與討論
3.1 實驗數據分析
對比有無AR-HUD兩種狀態,駕駛員對不同危險駕駛情景的反應能力,并結合評價量表的得分,評估系統的有效性.實驗共收集30名被試者的危險反應時間和15份有效的評價量表.
3.1.1危險反應時間
被試者的平均反應時間數據及條形圖見表5和圖4.數據顯示,在各危險駕駛情景中,AR-HUD組的反應時間均低于對照組,并且數據浮動更小.利用單因素方差分析對數據進行近一步分析(選取顯著性水平ɑ=0.05,查表得F0.05(1,13)=4.67).對于低可見度視野條件下潛在的側撞風險,前方行人和非機動車三類危險情景,兩組數據有統計上的顯著差異.而在正常的可見度條件下,兩組數據差異較小.

表5 被試者平均反應時間
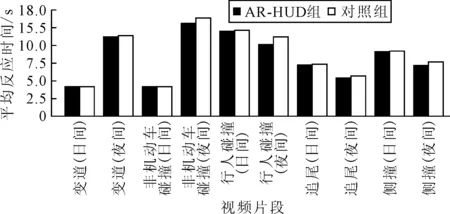
圖4 被試者平均反應時間條形圖
3.1.2評價量表得分
被試者對評價量表的得分數據折線圖見圖5,單因素方差分析的結果顯示,兩組數據無統計上的顯著差異.數據顯示:
1) 夜間條件下的安全警示信息得分比日間提高18%,通過口語報告分析可得,在日間,駕駛員一般能夠及時的發現潛在的駕駛風險,而AR-HUD系統提供的警示符號投影到了視野前方,對前方視野有所遮擋,駕駛員因此不能及時對前方障礙物的狀態作出準確的判斷.而在低可見度條件下,由于視野模糊,AR-HUD系統提供的警示符號能很好的提醒駕駛員前方出現的障礙物.
2) AR-HUD系統導航信息視覺符號覆蓋了整個車道,并且亮度比較高,遮蓋了真實的道路狀況.駕駛員容易沉浸在AR-HUD系統中,而忽略了道路中檢測不到的潛在危險,例如坑洼、結冰的路面、較小的障礙物等.
3) 按照不同年齡層來看,年長者對該系統的評分最低,認為真實的駕駛環境更加可靠.AR-HUD系統對駕駛環境的遮擋反而使駕駛過程更加緊張.按照不同性別來看,女性對該系統的各項評分均高于男性,認為該系統能夠有效的幫助駕駛員判斷潛在的駕駛危險,使駕駛過程更加輕松.

圖5 評價量表得分折線圖
3.2 結果討論
實驗結果部分證明了該系統的有效性,但在正常可見度條件下,兩組被試者的危險反應時間數據并沒有統計上的顯著差異.原因可能是被試者的數量較少,數據上存在誤差.另一方面,實驗過程是基于模擬駕駛器進行的,盡管這種方法能夠較為簡單的收集到被試者的反應時間,但仍與真實的駕駛狀態有所區別,造成實驗數據不精確.因而,正常可見度條件下,AR-HUD對駕駛員危險認知行為的影響,需要進一步的研究.
通過實驗數據的分析,總結系統界面設計需要注意的問題:①視覺符號的設計應采用簡潔的形態,尤其應注意大小比例,避免與背景物體形成沖突而干擾了駕駛員對危險情景的判斷.②視覺符號的亮度應該能夠根據環境的變化進行調解,保證其引起駕駛員足夠的注意力的同時又不會對真實駕駛環境的產生干擾.
4 結 束 語
增強現實技術與抬頭顯示技術的結合,反映了未來汽車智能化、信息化的重要標志,對未來輔助駕駛、車載娛樂以及導航的發展起到強有力的推動作用.文中分別從AR-HUD駕駛安全輔助系統的目標識別、信息組織、視覺設計、三維注冊以及虛實融合模塊進行了探索.為驗證該系統的有效性,文中設計一個較為完整的測試實驗,通過危險反應時測試、語義差異法和口語分析法,從客觀與主觀,定性與定量兩方面對AR-HUD駕駛安全輔助系統進行考量.為進一步規范該系統的信息組織準則和視覺設計策略提供理論依據.
[1] 王興,秦齊.車載平視顯示技術[J].電光與控制,2014(1):55-58.
[2] 張桂偉,姜立軍.中國汽車市場抬頭顯示現狀探究[J].工業設計,2015(10):67-68.
[3] 樸范鎮,李鋒,姜元義.基于模擬駕駛器的HUD信息分析[J].交通標準化,2012(2):82-85.
[4] GIBBERED D L,JAMSON S L,CARSTEN O M J. Managing in-vehicle distraction: evidence from the psychological refractory period paradigm[C].The 2nd International Conference on Automotive User Interfaces and Interactive Vehicular Applicationsp,Pittsburgh,2010.
[5] 譚浩,譚紀宇,景春暉.汽車人機交互界面設計[M].北京:電子工業出版社,2015.
[6] 駱云志,雷雨能,王鈐.基于毫米波雷達和CCD攝像機信息的D-S融合方法[J].數據采集與處理,2014(4):648-653.
[7] PARK H, KIM K H.Efficient information representation method for driver-centered ar-hud system[J].Design,User Experience,and Usability,2013(1):393-400.
[8] 王建美,羅衛東,曹博.車載HUD的人機界面設計[J].自動化儀表,2015(7):85-87.
[9] 張立鵬.基于自然特征的增強現實實時跟蹤研究[D].上海:華東理工大學,2013.
Design and Research of Vehicle Driving Auxiliary System Based on AR-HUD
LIZhuoZHOUXiaoZHENGYangshuo
(SchoolofAutomotiveEngineering,WuhanUniversityofTechnology,Wuhan430070,China)
In this paper, an in-vehicle augmented reality head-up display driving assistant system prototype was proposed to improve the driver’s visual distraction and cognitive load. In order to examine the effectiveness of this system from both objective and subjective, qualitative and quantitative aspects, an experiment on driver’s risk perception behavior under normal visibility and low visibility conditions was conducted, and an AR-HUD system evaluation scale was introduced. The results show that the AR-HUD system significantly increases the response time of drivers to the risky situations under low-visibility conditions. These experimental results partially confirm the effectiveness of this AR-HUD system prototype. The validity of the AR-HUD system prototype is verified by experimental results.
AR-HUD; visual symbols; risk perception and behavior; evaluation scale
U463.6
10.3963/j.issn.2095-3844.2017.06.007
2017-10-14
李卓(1978—):男,博士,副教授,主要研究領域為車身工程與創新設計
*中央高校基本科研業務費項目(20410953)、2016年度國家社會科學基金藝術學青年項目(16cg170)資助
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
公民與法治(2016年4期)2016-05-17 04:09:26
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32