高超聲速飛行器俯沖段制導(dǎo)控制方法研究*
2018-01-02 17:25:12劉清楷陳堅(jiān)汪立新秦偉偉張廣豪
現(xiàn)代防御技術(shù) 2017年6期
劉清楷,陳堅(jiān),汪立新,秦偉偉,張廣豪
(火箭軍工程大學(xué),陜西 西安 710025)
0 引言
高超聲速飛行器由于其飛行速度快、機(jī)動(dòng)能力強(qiáng)等特點(diǎn),具有較高的軍事和民用價(jià)值[1],成為國(guó)內(nèi)外研究熱點(diǎn),但其具有的復(fù)雜氣動(dòng)模型,使其呈現(xiàn)出強(qiáng)非線性、快時(shí)變和強(qiáng)耦合性等特點(diǎn),為制導(dǎo)控制系統(tǒng)設(shè)計(jì)帶來(lái)了極大的挑戰(zhàn)[2]。
俯沖段作為高超飛行器攻擊目標(biāo)的最后一個(gè)階段,事關(guān)飛行任務(wù)的成敗。現(xiàn)有文獻(xiàn)對(duì)俯沖段制導(dǎo)與控制問(wèn)題做了多方面研究,成功將最優(yōu)控制[3],滑模控制[4],反演法[5],動(dòng)態(tài)逆[6]等非線性控制方法,以及Fuzzy控制[7]、預(yù)測(cè)控制[8]和神經(jīng)網(wǎng)絡(luò)[9]等現(xiàn)代控制方法應(yīng)用到其中。但目前已有的研究大多是針對(duì)制導(dǎo)或控制問(wèn)題中某一方面進(jìn)行研究,本文則進(jìn)行制導(dǎo)控制回路的綜合設(shè)計(jì)。
傳統(tǒng)導(dǎo)彈制導(dǎo)控制回路設(shè)計(jì)常采用分離理論[10],忽略制導(dǎo)與控制回路之間的耦合,分別獨(dú)立進(jìn)行兩個(gè)回路的設(shè)計(jì)工作,在制導(dǎo)回路設(shè)計(jì)時(shí)一般不包含彈體的姿態(tài)、轉(zhuǎn)速等狀態(tài)信息,在彈目相對(duì)運(yùn)動(dòng)速度較大時(shí),產(chǎn)生的制導(dǎo)指令容易超出控制回路的性能限制。同時(shí),控制回路的設(shè)計(jì)也未涉及到導(dǎo)彈與目標(biāo)之間的位置和速度信息,因此無(wú)法根據(jù)和目標(biāo)的相對(duì)距離而調(diào)整自身的響應(yīng)速度。這種結(jié)構(gòu)在彈目相對(duì)運(yùn)動(dòng)速度不是特別大的情況下是可以滿足應(yīng)用要求的,但由于高超聲速飛行器的速度快,這種結(jié)構(gòu)就難以適用。制導(dǎo)控制一體化(integrated guidance and control,IGC)方法使用一個(gè)回路完成制導(dǎo)與控制,簡(jiǎn)化了回路設(shè)計(jì),充分運(yùn)用了狀態(tài)信息,然而由于制導(dǎo)與控制回路變量間存在固有的時(shí)間常數(shù)差距,比較理想化,不利于工程應(yīng)用。在飛行器進(jìn)行高速機(jī)動(dòng)時(shí),可能會(huì)造成控制失穩(wěn)乃至發(fā)散的情況出現(xiàn),這是由于在使用舵面進(jìn)行控制時(shí),所產(chǎn)生的控制力矩要遠(yuǎn)大于所產(chǎn)生的控制力,在產(chǎn)生滿足制導(dǎo)要求的控制力的情況時(shí),就可能造成姿態(tài)失穩(wěn)。而本文所采用的回路結(jié)構(gòu),綜合了IGC單回路和傳統(tǒng)方法的特點(diǎn),既綜合利用彈目相對(duì)運(yùn)動(dòng)信息和機(jī)體角速度等狀態(tài)信息,同時(shí)又兼顧了變量間時(shí)間常數(shù)的差別,同時(shí)與IGC采用單回路相比,還可以避免狀態(tài)量的高階導(dǎo)數(shù)的出現(xiàn)。本文根據(jù)彈目相對(duì)運(yùn)動(dòng)的信息,結(jié)合高超聲速飛行器六自由度模型,通過(guò)計(jì)算得到所需的外環(huán)角速度指令表達(dá)式,采用滑模控制方法進(jìn)行跟蹤,得到所需的舵偏角指令信號(hào)。本文嘗試建立高超聲速飛行器的六自由度模型,直接利用文獻(xiàn)[11]所給GHV(generic hypersonic vehicle)模型,而不進(jìn)行一般文獻(xiàn)所做的面向控制的模型簡(jiǎn)化。
1 模型描述
1.1 高超聲速飛行器六自由度模型
由于高超聲速飛行器俯沖段飛行距離短,故考慮在大地為平面的假設(shè)下,在機(jī)體坐標(biāo)系建立高超聲速飛行器的六自由度模型[12]。
(1)
式中:Fx=Lsinα-Ncosαsinβ-Dcosαcosβ;Fy=Lcosα+Nsinαsinβ+Dsinαcosβ;Fz=Ncosβ-Dsinβ;u,v,w為高超聲速飛行器速度在機(jī)體系的分量;m為高超聲速飛行器質(zhì)量;g為重力加速度;α,β為攻角和側(cè)滑角;D,L,N為氣動(dòng)阻力;Ixx,Iyy,Izz為飛行器轉(zhuǎn)動(dòng)慣量;lx,ly,lz分別為滾動(dòng)、偏航和俯仰通道氣動(dòng)參考長(zhǎng)度。
氣動(dòng)阻力、氣動(dòng)升力以及氣動(dòng)側(cè)向力具體表達(dá)式為

由于采用了GHV模型,這里有l(wèi)x=ly=a,lz=c,且a,c分別為飛行器橫向氣動(dòng)參考長(zhǎng)度和縱向氣動(dòng)參考長(zhǎng)度;ωx,ωy,ωz為機(jī)體角速度在機(jī)體系的分量;t12,t22,t32為矩陣TBI的元素,TBI為用四元數(shù)q0,q1,q2,q3表示的慣性系到機(jī)體系的變換矩陣。四元數(shù)的更新公式[13]為
(2)
式中:
高超聲速飛行器的質(zhì)心運(yùn)動(dòng)方程為
(3)
式中:xg,yg,zg為飛行器質(zhì)心位置在地面慣性系中的分量。
本文將利用式(1)的六自由度方程和式(3)進(jìn)行制導(dǎo)控制系統(tǒng)的設(shè)計(jì),并利用其進(jìn)行數(shù)字仿真驗(yàn)證。
1.2 三維彈目相對(duì)運(yùn)動(dòng)模型
本文基于零化視線角速率原理生成外環(huán)控制指令,圖1給出了飛行器與目標(biāo)相對(duì)運(yùn)動(dòng)的關(guān)系。首先建立地面目標(biāo)與高超聲速飛行器的相對(duì)運(yùn)動(dòng)模型[14]為
(4)

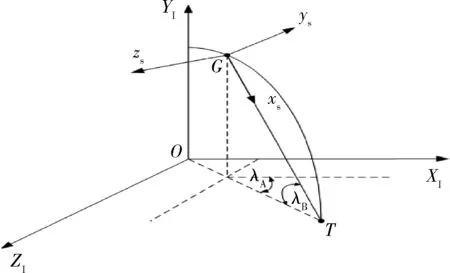
圖1 飛行器與目標(biāo)相對(duì)運(yùn)動(dòng)關(guān)系示意圖Fig.1 Geometry of relationship between vehicle and target
2 制導(dǎo)控制回路設(shè)計(jì)
前面已經(jīng)提到了不完全制導(dǎo)控制一體化方法的主要思想,圖2給出了內(nèi)外回路的結(jié)構(gòu)關(guān)系。首先由外環(huán)根據(jù)相對(duì)距離信息給出所期望的角速度作為中間控制量,在由內(nèi)環(huán)跟蹤這個(gè)中間控制量得到最終的舵偏角控制量,這一過(guò)程通過(guò)解析的運(yùn)算,不會(huì)出現(xiàn)由于集成度的增加而造成過(guò)控的情形出現(xiàn)。下面就分別對(duì)2個(gè)回路進(jìn)行設(shè)計(jì)。
2.1 外環(huán)設(shè)計(jì)
前面給出了飛行器的六自由度運(yùn)動(dòng)模型,對(duì)式(3)進(jìn)行求導(dǎo),整理可得
(5)
式中:
將式(2)代入式(5)得到:
(6)

m11=2(q0q3-q1q2)v+2(q0q2+q1q3)w;

m22=2(q0q1-q2q3)u+2(q0q3+q1q2)w;
m33=2(q0q1+q2q3)u+2(q0q2-q1q3)v.
由式(4)可得
(7)
式中:
為滿足視線角速率為0的要求,設(shè)計(jì)滑模面向量為
.
(8)
取如下的終端滑模到達(dá)律:
(9)
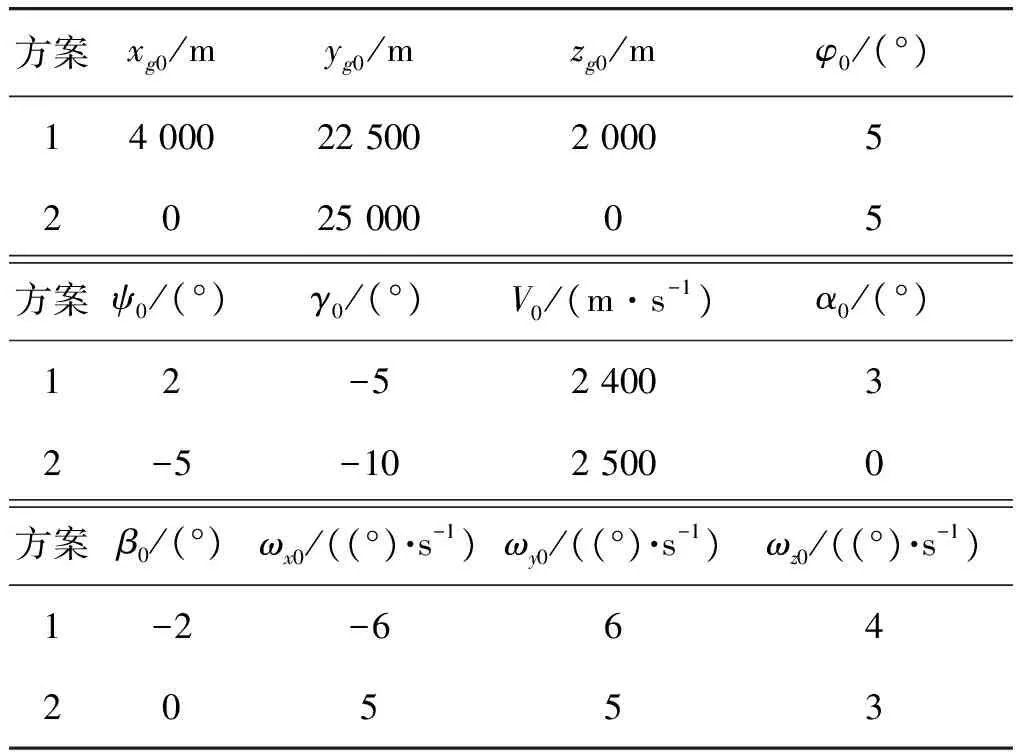
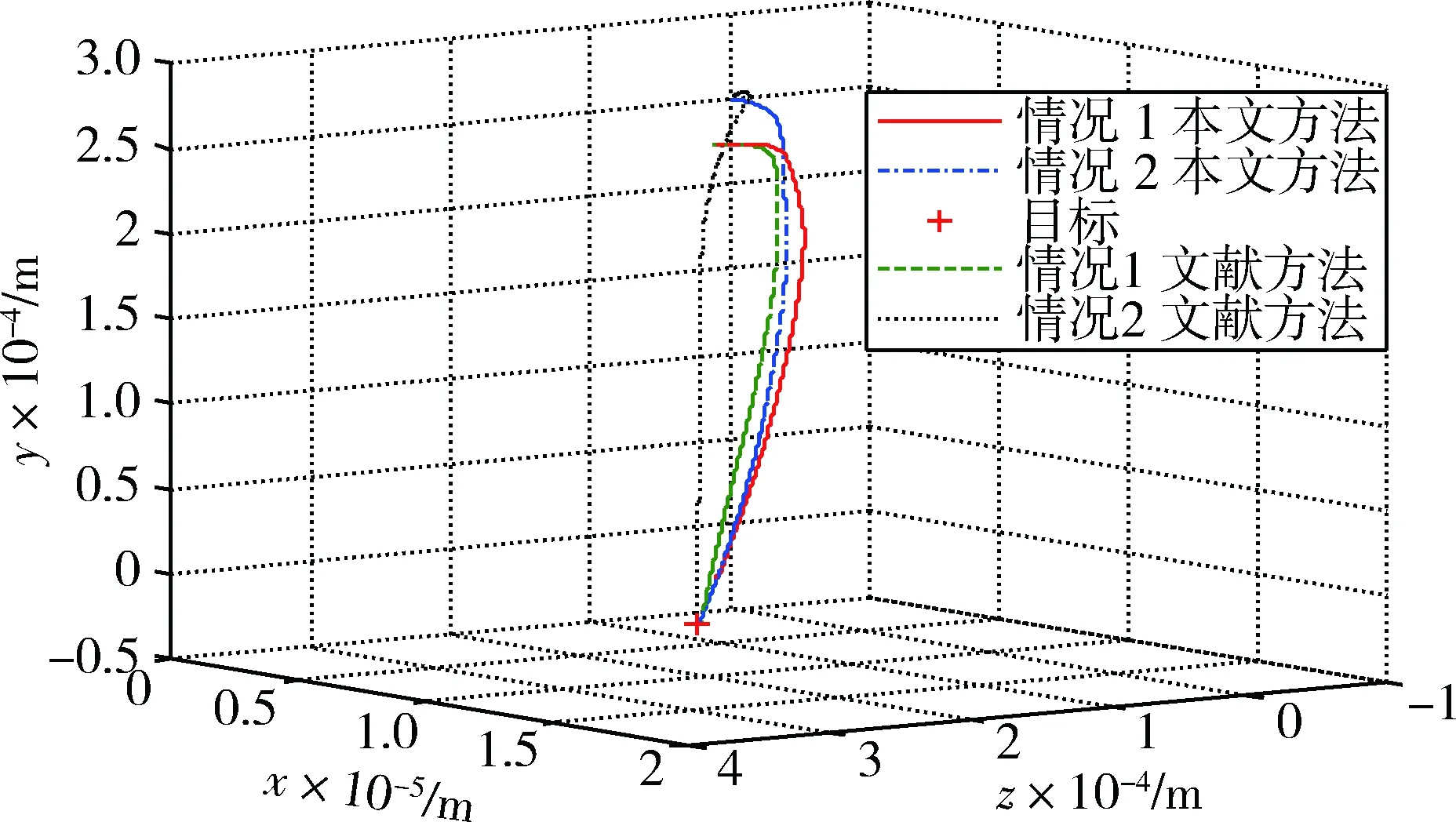
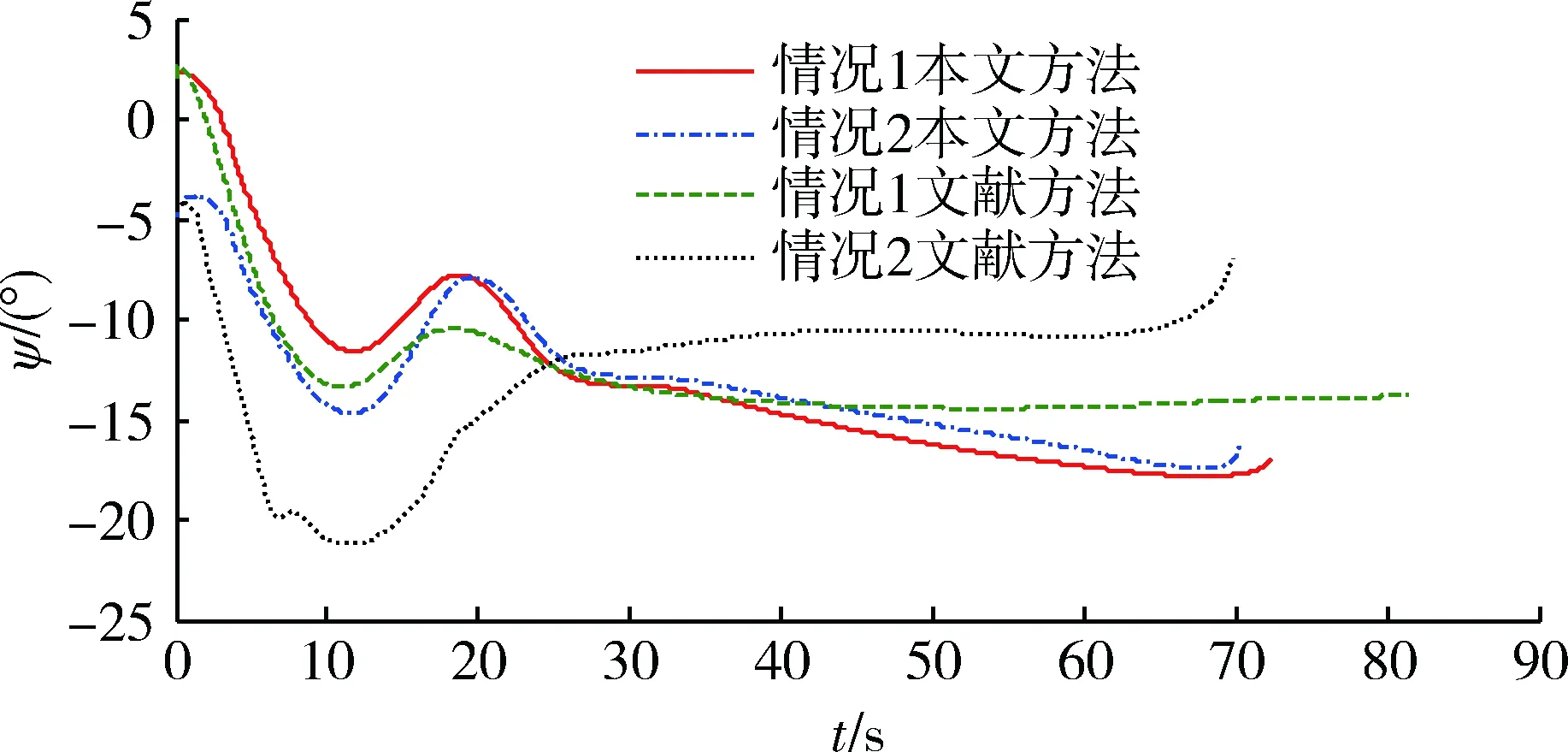
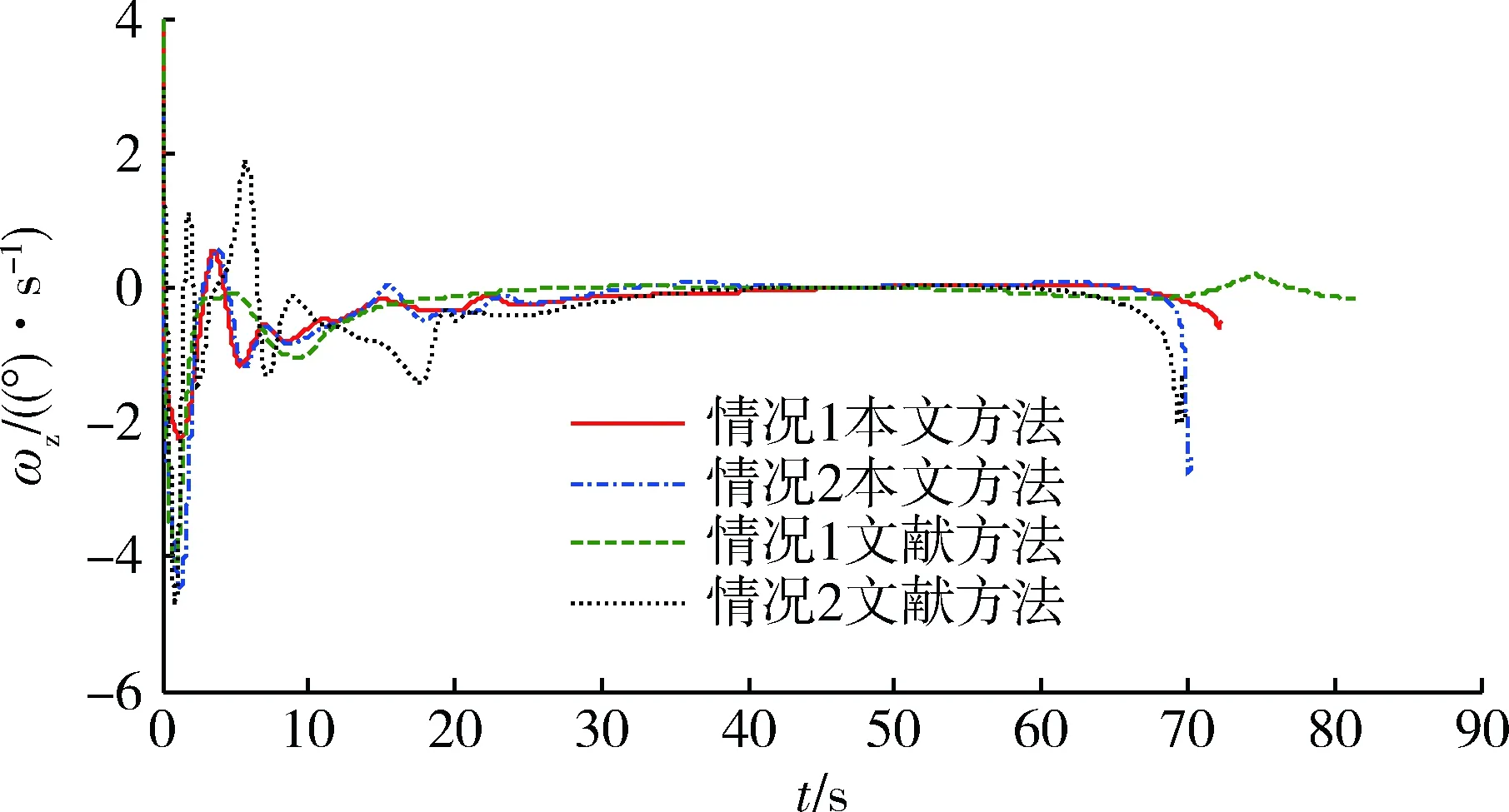
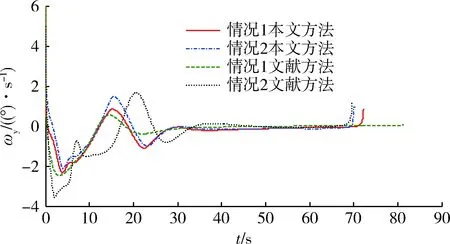
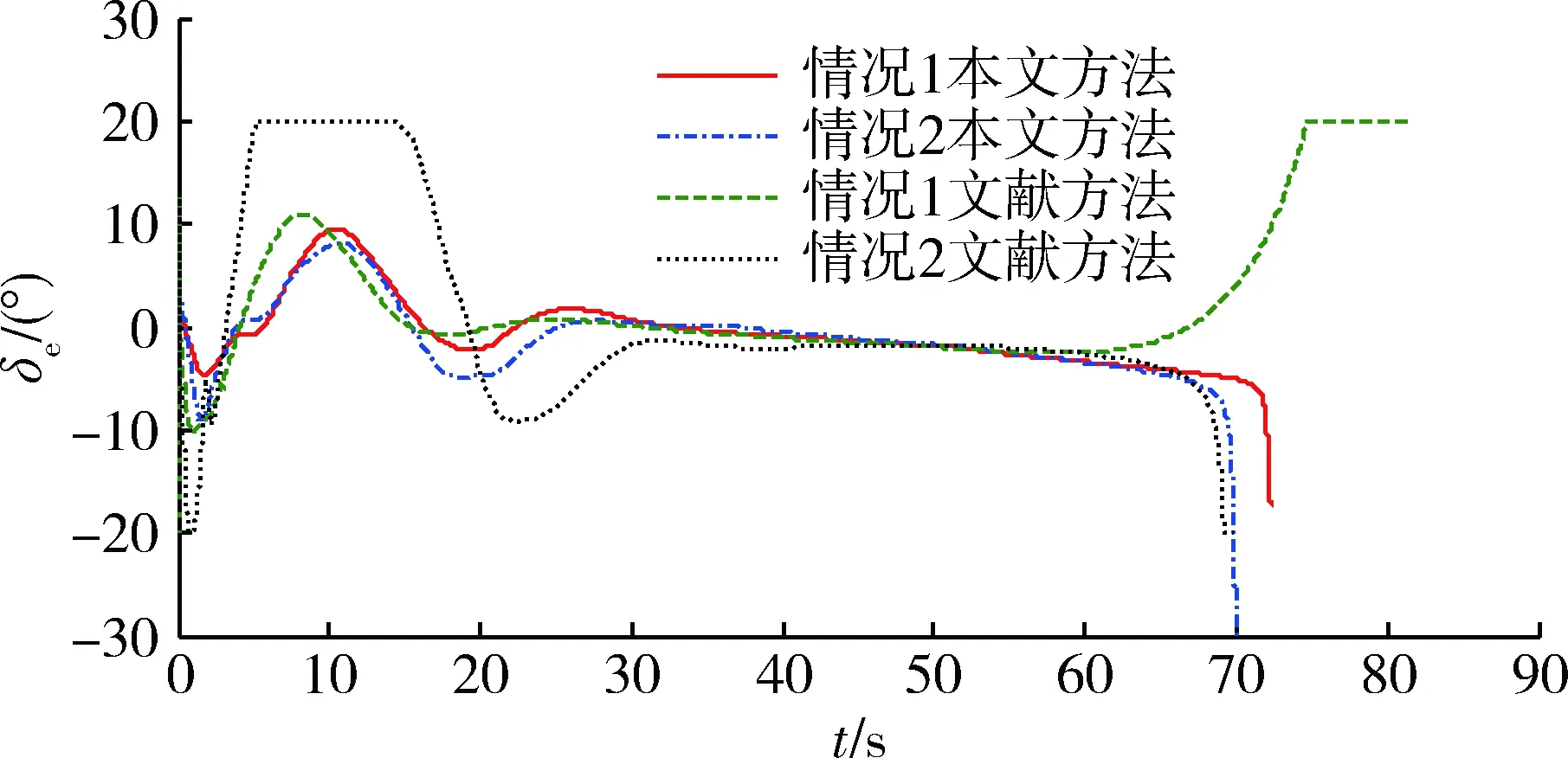
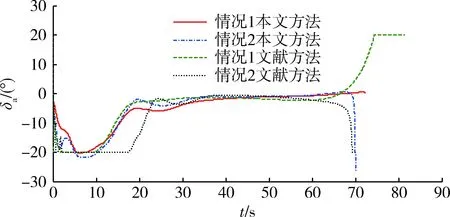
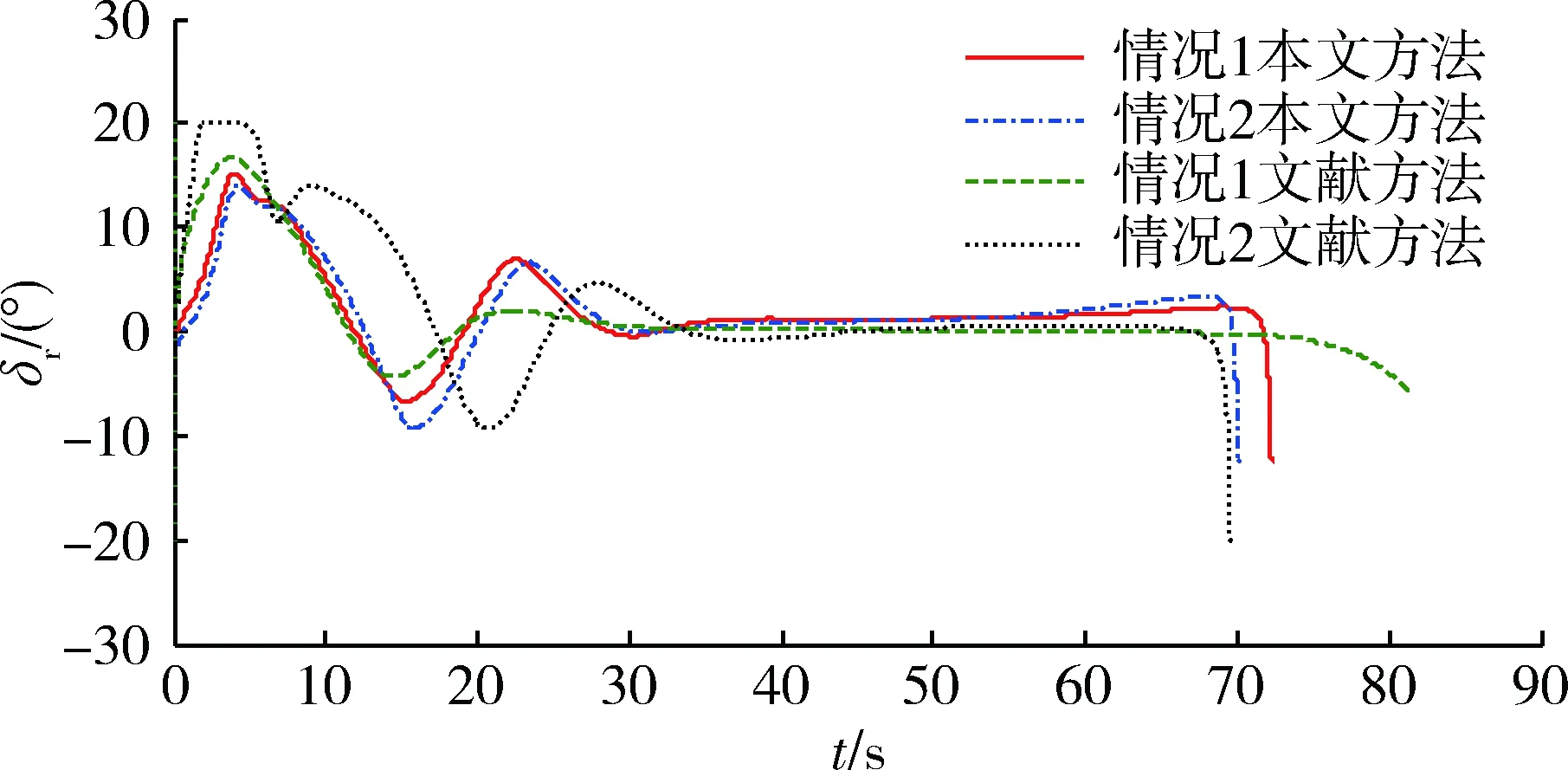
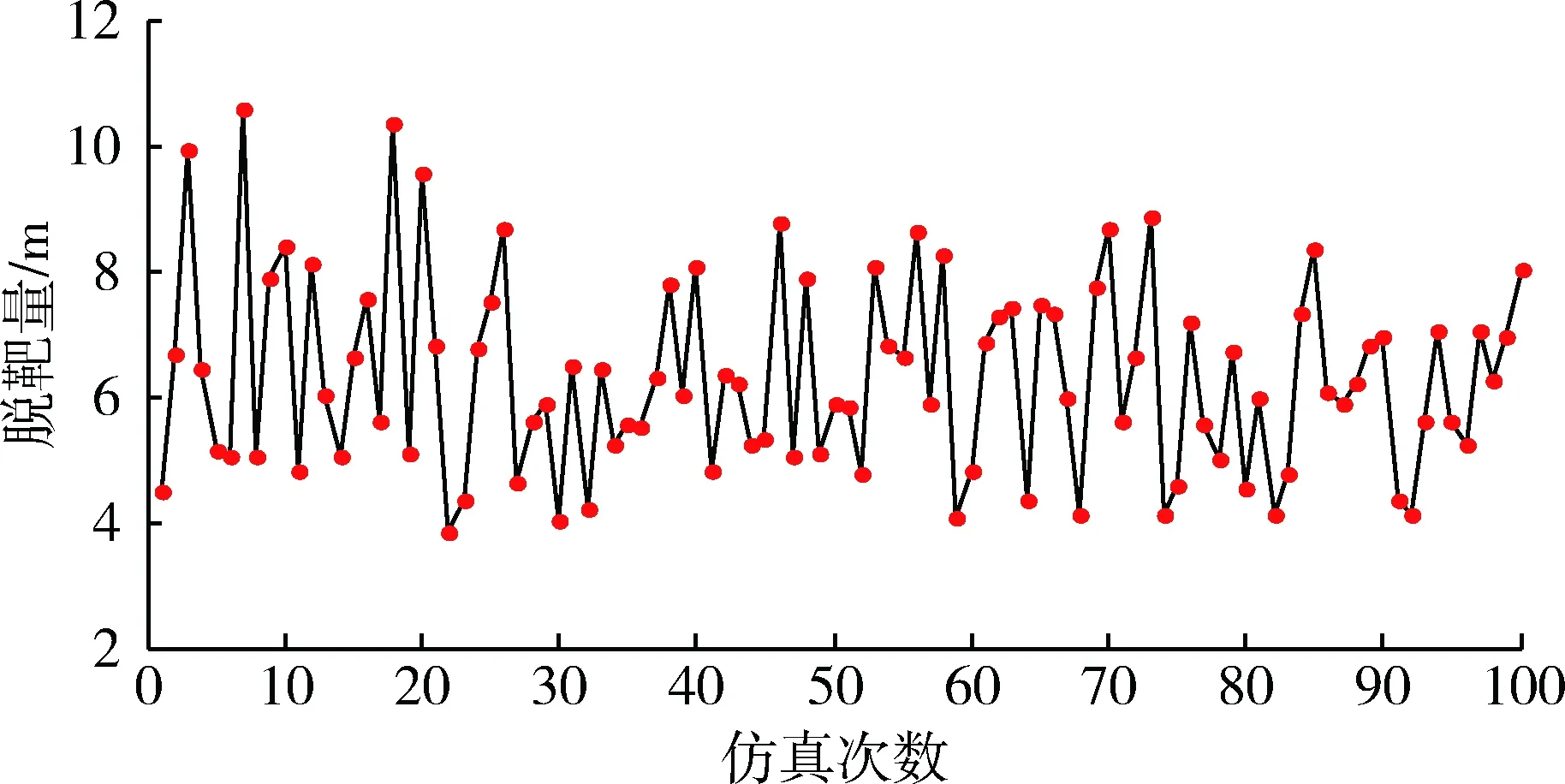
式中:k11,k12∈R2×2;0 將式(8)求導(dǎo)得到: 將式(6)代入上式得 . (10) 通過(guò)式(10)即可獲得滿足飛行器準(zhǔn)確命中目標(biāo)要求的角速率信號(hào),將其作為外環(huán)虛擬控制量送入內(nèi)環(huán)。下面設(shè)計(jì)內(nèi)環(huán)通過(guò)跟蹤該虛擬控制量來(lái)產(chǎn)生飛行器的舵偏指令信號(hào)。 將式(1)作以下變形: (11) 圖2 回路結(jié)構(gòu)關(guān)系示意圖Fig.2 Structure relationship between the outer and inner loops 式中:ΔCl,ΔCn,ΔCm為除去舵偏一次相關(guān)項(xiàng)系數(shù)剩余的氣動(dòng)力矩系數(shù)。 為跟蹤外環(huán)得到的角速率控制信號(hào),設(shè)計(jì)滑模面為 (12) 同時(shí)采用如下滑模到達(dá)律: (13) 式中:k21,k22∈R3×3為待設(shè)計(jì)反饋系數(shù)。 由式(10)可得期望的舵偏角指令為 . (14) 考慮實(shí)際舵機(jī)執(zhí)行機(jī)構(gòu)的動(dòng)態(tài)過(guò)程,將舵偏角指令通過(guò)下面的二階慣性環(huán)節(jié),得到的輸出作為仿真時(shí)的舵偏角為 (15) 式中:ωn=20 Hz為執(zhí)行機(jī)構(gòu)自然頻率;ξ=0.7為阻尼比。 設(shè)置偏角幅值范圍為(-25°,25°),偏角速率范圍為(-100,100)(°)/s。 為了減小滑模控制的抖振,采用飽和函數(shù)來(lái)替代符號(hào)函數(shù)。 本文基于大部分已有文獻(xiàn)所采用的Langley發(fā)布的GHV模型進(jìn)行仿真驗(yàn)證。為了驗(yàn)證本文所推導(dǎo)方法的有效性,通過(guò)設(shè)置飛行器不同初始條件,進(jìn)行仿真,同時(shí)采用文獻(xiàn)[15]的IGC方法,(以下簡(jiǎn)稱文獻(xiàn))在相同條件下進(jìn)行仿真,觀察仿真結(jié)果。 仿真所需的初始仿真條件以及所設(shè)計(jì)的一些參數(shù)值如表1所示。 表1 飛行參數(shù)初始值Table 1 Initial value of the flight 四元數(shù)初始值(q00,q10,q20,q30)T由下式求得,式中φ0,ψ0,γ0分別為飛行器初始俯仰角,偏航角,滾動(dòng)角。 (q00,q10,q20,q30)T= 速度分量初始值 可由下式計(jì)算得到: 式中: . 飛行器基本參數(shù)如表2所示。 設(shè)定目標(biāo)位置坐標(biāo)為:xt=150 000 m,yt=0 m,zt=30 000 m;文中所設(shè)計(jì)的參數(shù):d1=d2=0.6,k11=diag(0.015,0.02),k12=diag(0.005,0.005),k21=diag(1.5,1.5),k22=diag(0.001 5,0.001 5)。 仿真結(jié)果如圖3~13所示。這里說(shuō)明在圖10~12中舵偏角在最后時(shí)刻出現(xiàn)了迅速增加的情形,這是由于直接使用彈目相對(duì)運(yùn)動(dòng)信息,本文的處理方法與文獻(xiàn)[12]中一致。 圖3 飛行器在三維空間運(yùn)動(dòng)軌跡圖Fig.3 Trajectories of the vehicle in 3D space 圖4 俯仰角變化圖Fig.4 Curves of the pitch angle 為檢驗(yàn)本文提出的制導(dǎo)控制方法的魯棒性,圖13給出了Monte Carlo法仿真得到的脫靶量散點(diǎn)圖;在仿真時(shí),對(duì)飛行器的質(zhì)量和轉(zhuǎn)動(dòng)慣量的標(biāo)稱值上加入相當(dāng)于標(biāo)稱值15%的高斯隨機(jī)噪聲,其余條件與情況一保持一致,最終其脫靶量均值為6.312 m,均方差為1.532 m,可以看出本文方法具有一定的魯棒性。 通過(guò)仿真可以看出高超聲速飛行器能夠以3.484 m的精度命中目標(biāo),文獻(xiàn)[15]的精度為6.562 m,使用本文方法提高了命中精度,并且飛行器在飛行過(guò)程中的狀態(tài)量和舵偏角變化相比文獻(xiàn)[15]更加平穩(wěn)。可以看到飛行器飛行過(guò)程中,各項(xiàng)狀態(tài)變化平穩(wěn),這得益于跟蹤角速度來(lái)產(chǎn)生控制指令,這種思想類似于積分滑模減小抖振的原理。 圖5 偏航角變化圖Fig.5 Curves of the yaw angle 圖6 滾動(dòng)角變化圖Fig.6 Curves of the roll angle 圖7 俯仰角速率變化圖Fig.7 Curves of the pitch angle rates 表2 GHV基本參數(shù)Table 2 Basic parameters of the GHV 圖8 偏航角速率變化圖Fig.8 Curves of the yaw angle rates 圖10 左側(cè)升降舵舵偏變化圖Fig.10 Curves of the left elevon deflections 圖11 右側(cè)升降舵舵偏變化圖Fig.11 Curves of the right elevon deflections 圖12 方向舵舵偏變化圖Fig.12 Curves of the rudder deflections 圖13 脫靶量散點(diǎn)圖Fig.13 Miss distance scatter diagram 針對(duì)高超聲速飛行器的制導(dǎo)與控制問(wèn)題,建立了基于四元數(shù)的高超聲速飛行器的六自由度模型,避免了高超聲速飛行器在大機(jī)動(dòng)飛行時(shí),歐拉角解算存在的發(fā)散問(wèn)題;利用三維彈-目模型,未進(jìn)行橫縱向平面的解耦,更加符合高超聲速進(jìn)行大范圍機(jī)動(dòng)的特點(diǎn),充分利用了相對(duì)運(yùn)動(dòng)信息,使高超聲速飛行器在高速度飛行過(guò)程中保持平穩(wěn)可控,有效完成目標(biāo)打擊任務(wù)。通過(guò)Monte Carlo法驗(yàn)證了本文方法具有一定的魯棒性,綜合仿真的結(jié)果來(lái)看本文方法具有一定的理論意義,但在制導(dǎo)信息中存在噪聲的情況還考慮不足,可以作為下一步的研究方向。 [1] 孫長(zhǎng)銀,穆朝絮,余瑤.近空間高超聲速飛行器控制的幾個(gè)科學(xué)問(wèn)題研究[J].自動(dòng)化學(xué)報(bào),2013,39(11):1901-1913. SUN Chang-yin,MU Chao-xu,YU Yao.Some Control Problems for Near Space Hypersonic Vehicles[J].AcTa Automatica Sinica,2013,39 (11):1901-1913. [2] 李惠峰.高超聲速飛行器制導(dǎo)與控制技術(shù)[M].北京:中國(guó)宇航出版社,2012:242-243. LI Hui-feng.Guidance and Control Technology of Hypersonic Vehicles[M].Beijing:China Astronautic Publishing House,2012:242-243. [3] ZHU J W,LIU L H,TANG G J,et al.Highly Constrained Optimal Gliding Guidance[J].Journal of Aerospace Engineering,2015,229(12):2321-2335. [4] 朱建文,劉魯華,湯國(guó)建,等.基于反饋線性化及滑模控制的俯沖機(jī)動(dòng)制導(dǎo)方法[J].國(guó)防科技大學(xué)學(xué)報(bào),2014,36(2):24-29. ZHU Jian-wen,LIU Lu-hua,TANG Guo-jian,et al.Diving Guidance with Maneuver Based on Feedback Linearization and Slide Mode Control[J].Journal of National University of Defense Technology,36(2):24-29. [5] 宋超,趙國(guó)榮,蓋俊峰.基于非線性干擾觀測(cè)器的高超聲速飛行器反演滑模控制[J].系統(tǒng)工程與電子技術(shù),2012,34(6):1231-1234. SONG Chao,ZHAO Guo-rong,GAI Jun-feng.Sliding Mode Backstepping Control for Hypersonic Aircraft Based on Nonlinear Disturbance Observer[J].Systems Engineering and Electronics,2012,34( 6):1231-1234. [6] 曾憲法,王小虎,張晶,等.高超聲速飛行器的干擾補(bǔ)償Terminal滑模控制[J].北京航空航天大學(xué)學(xué)報(bào),2012,38(11):1454-1458. ZENG Xian-fa,WANG Xiao-hu,ZHANG Jing,et al.Disturbance Compensated Terminal Sliding Mode Control for Hypersonic Vehicles[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(11):1454-1458. [7] HU X,WU L,HU C,et al.Fuzzy Guaranteed Cost Tracking Control for a Flexible Air-Breathing Hypersonic Vehicle[J].Iet Control Theory & Applications,2012,6(9):1238-1249. [8] ZHANG T,ZHOU J,GUO J.Design of Predictive Controller for Hypersonic Vehicles Based on Disturbance Observer[J].Acta Aeronautica Et Astronautica Sinica,2014,35(1):215-222. [9] XU B,SHI Z K,YANG C G,et al.Neural Control of Hypersonic Flight Vehicle Model Via Time-Scale Decomposition with Throttle Setting Constraint[J].Nonlinear Dynamics,2013,73(3):1849-1861. [10] 趙善友.防空導(dǎo)彈武器尋的制導(dǎo)控制系統(tǒng)設(shè)計(jì)[M].北京:宇航出版社,1992:136-140. ZHAO Shan-you.Homing Guidance and Control System Design for Air Defense Missiles[M].Beijing:China Astronautics Publishing House,1992:136-140. [11] KESHMIRI S,MIRMIRANI M,COLGREN R.Six-DOF Modeling and Simulation of a Generic Hypersonic Vehicle for Conceptual Design Studies[C]∥AIAA Modeling and Simulation Technologies Conference and Exhibit,Rhode Island,August 16-19,2004. [12] 趙漢元.飛行器再入動(dòng)力學(xué)與制導(dǎo)[M].長(zhǎng)沙:國(guó)防科技大學(xué)出版社,1997:56-64. ZHAO Han-yuan.Spacecraft Reentry Dynamics & Guidance[M].Changsha:Press of National University of Defense Technology,1997:56-64. [13] 秦麗,張文棟,潘峰.大攻角飛行載體運(yùn)動(dòng)學(xué)建模的四元數(shù)方法研究[J].中北大學(xué)學(xué)報(bào):自然科學(xué)版,2006,27(3):276-279. QIN Li,ZHANG Wen-dong,PAN Feng.Quaternion Method for Kinematics Modeling of High Attack Angle Flying Carrier[J].Journal of North University of China:Natural Science ed,2006,27(3):276-279. [14] 周荻.尋的導(dǎo)彈新型導(dǎo)引規(guī)律[M].北京:國(guó)防工業(yè)出版社,2002:14-16,30-31. ZHOU Di.New Guidance Laws for Homing Missile[M].Beijing:National Defense Industry Press,2002:14-16,30-31. [15] 王建華,劉魯華,王鵬,等.高超聲速飛行器俯沖段制導(dǎo)控制一體化設(shè)計(jì)方法[J/OL].航空學(xué)報(bào).(2016-08-17)[2017-01-02].http://www.cnki.net/kcms/detail/11.1929.V.20160817.1424.002.html. WANG Jian-hua,LIU Lu-hua,WANG Peng,et al.Integrated Guidance and Control Scheme for Hypersonic Vehicles in Dive Phase[J/OL].Acta Aeronautica et Astronautica Sinica. (2016-08-17)[2017-01-02].http://www.cnki.net/kcms/detail/ 11.1929.V.20160817.1424.002.html.

2.2 內(nèi)環(huán)設(shè)計(jì)


3 仿真校驗(yàn)
3.1 仿真條件及參數(shù)
3.2 仿真結(jié)果



4 結(jié)束語(yǔ)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56