基于遺傳算法優化的模糊PID控制在糧食干燥中的應用
2018-01-02 08:44:22周曉光代愛妮王海霞
軟件 2017年12期
聶 放,周曉光,代愛妮,邢 穎,王海霞
(北京郵電大學自動化學院 教育部信息網絡工程研究中心,北京 100876)
基于遺傳算法優化的模糊PID控制在糧食干燥中的應用
聶 放,周曉光,代愛妮,邢 穎,王海霞
(北京郵電大學自動化學院 教育部信息網絡工程研究中心,北京 100876)
針對傳統控制算法在糧食干燥機的控制系統中控制效果不理想的問題,本論文提出了一種遺傳優化的模糊PID控制算法,實現了糧食干燥機的自動控制。該算法結合了模糊控制和PID控制的優點,并且利用遺傳算法的全局優化能力和并行能力優化模糊PID控制器的量化因子及其PID參數的修正系數,實現了最優控制。以控制系統的動態性能指標與穩態性能指標作為綜合評價指標,建立了包含控制系統的調節時間、超調量和穩態誤差三項指標的目標函數,基于該目標函數,利用遺傳算法進行了模糊PID控制器的參數優化,改進了常規PID控制、常規模糊PID控制器的控制效果。最后,在MATLAB中,進行了控制性能的仿真與比較,仿真結果表明:糧食干燥機采用基于遺傳算法優化的模糊PID控制后,其控制性能優于無優化的模糊PID控制以及常規的PID控制。該算法可為糧食干燥的實際控制策略提供有效的參考。
控制理論;模糊PID控制;遺傳算法;糧食干燥;Matlab仿真
0 引言
糧食干燥是農業生產過程中的重要步驟和關鍵環節,其對象是一個有生命的有機體,在不斷地進行著呼吸作用,水分含量是影響糧食呼吸作用強弱的最重要的因素,糧食干燥的目的在于降低糧食的水分,從而降低呼吸強度,利于安全儲藏,但是,如果干燥條件過于強烈,糧食中的一些酶將失活,蛋白質將變性,使糧食失去生命力,從而對糧食品質產生一定的影響。
雖然糧食干燥機的結構較為簡單,但糧食干燥是一個復雜的熱質交換過程[1],它具有多變量、大滯后和非線性的特點,難以建立精確的數學模型,所以傳統的控制方式(經典控制理論和現代控制控制理論)在許多方面都難以達到理想的控制效果。隨著計算機控制技術和人工智能研究的發展,為糧食干燥的先進控制開拓了新的途徑,其中模糊控制憑借其不依賴被控對象精確模型等特點引起了研究人員的廣泛關注。中國農業大學毛志懷[2]在糧食干燥過程控制的研究現狀與發展方向一文中提出可以將模糊控制應用于糧食干燥;哈爾濱工程大學孫書明[3]在其論文中闡述了一種基于模糊控制的連續式糧食干燥機控制系統的設計與實現;吉林大學趙波[4]設計了一種糧食干燥模糊控制系統,而運行試驗表明其能有效穩定地實現控制等等。以上研究證明了模糊控制在糧食干燥機上應用的可行性以及優越性。而模糊PID控制綜合了模糊控制和PID控制的特點,具有結構簡單、魯棒性強等優點 。但是,模糊PID控制器的參數選取一般采用試湊等方法,有一定局限性,很難達到最優狀態[5]。本文基于模糊PID控制完成糧食干燥機控制器的設計,并利用遺傳算法的全局優化能力和并行能力,對模糊PID控制器的量化因子和PID參數的修正系數進行優化,搜索以上參數的最優值,完成控制器的優化;通過控制仿真,與無參數優化的模糊PID控制以及常規PID控制進行比較分析,驗證控制優化的有效性。
1 模型建立
1.1 糧食干燥機過程控制特點
(1)多變量
糧食干燥機過程控制是一個比較復雜的工業過程[6],不僅要考慮加工過程中糧食水分及溫度,干燥介質溫度、濕度及流量,以及外界氣候條件等參數的影響,還要兼顧到糧食干燥機的工藝流程(如順流、逆流、混流和橫流等)。另外,一些干燥變量無法直接測量,即使可以測量,測量值也不夠準確。
(2)非線性
糧食干燥是一種非線性過程[7],其非線性過程主要體現在干燥過程的降速階段,干燥時間與糧食流量成反比,是一種非線性關系,當糧食流量較低時,排糧速度的擾動對系統的影響就會比較明顯,容易造成控制的不穩定,這也是造成糧食過干或過濕的主要原因之一。
(3)大滯后
糧食干燥機過程控制系統的響應速度受谷物流速的影響,而糧食干燥時間一般較長(糧食在大型干燥機內滯留時間長達5~6 h)。因此系統的響應速度緩慢、且在干燥過程中交互作用嚴重,一個控制動作的改變會影響干燥機中的所有性能參數。
(4)強耦合
糧食干燥的各控制變量相互耦合,一個變量的改變會影響到其它變量,從而改變干燥條件,影響控制目標的實現。
1.2 糧食干燥機控制模型
綜合考慮糧食干燥機過程控制特點以及便于系統仿真的需要,可以將糧食干燥機看作是一階大滯后系統[8],其傳遞函數表達式為:

其中:0k為系統的開環放大倍數,T為慣性環節的時間參數,τ為滯后時間常數。根據糧食干燥機的特點,選擇0k=2.21,T=210 s,τ=60 s。即糧食干燥系統被控對象的傳遞函數為:

2 基于遺傳算法優化的模糊PID控制器的設計
2.1 糧食干燥機模糊PID控制
2.1.1 模糊PID控制原理
以PID控制方法為基礎,運用模糊算法思想,把被控量的偏差e和偏差變化率ec作為模糊推理的輸入變量,通過模糊算法規則整定PID的控制參數,構成了二維的模糊 PID控制器[9]。此方法將模糊控制的良好動態跟蹤能力和PID控制的良好穩定性能結合起來,其原理見圖1。
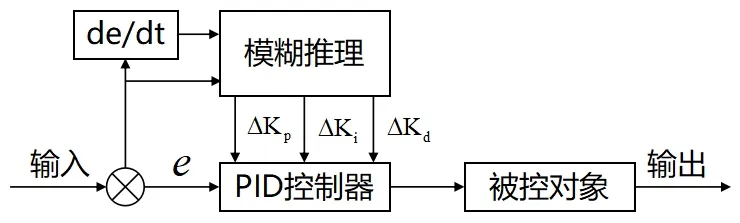
圖1 模糊PID控制原理Fig.1 The principle of fuzzy PID control
將偏差e和偏差變化率ec作為控制器的輸入,可以得到修正后的PID參數值:

式中: Kp, Ki, Kd為PID最終參數設定值;, Ki0, Kd0加為PID初始參數設定值; qkp,,為修正系數;ΔKp,ΔKi,ΔKd為模糊修正值。2.1.2 輸入輸出變量的確認與模糊化
根據模糊PID控制算法的原理與糧食干燥機控制系統的控制要求,選擇控制水分的偏差值e與偏差變化率ec作為模糊控制器的輸入變量,模糊修正值ΔKp,ΔKi,ΔKd作為模糊控制的輸出變量。控制器輸入輸出變量的模糊論域均選為[-3,3],論域選擇均為 7級,即模糊子集定義為[NB,NM,NS,ZE,PS,PM,PB],對應的量化因子分別為 Ke= 0 .6,Kec=0.2, Ku= 0 .9,對應的比例因子分別為各模糊子集隸屬度函數在確定時綜合考慮三角形、Z形以及S形,模糊推理方法選擇Mamdani min-max法[10],具體隸屬度函數見圖2。
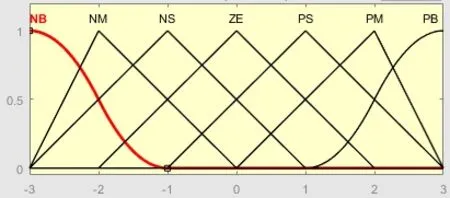
圖2 隸屬度函數Fig.2 Membership function
2.1.3 模糊控制規則與反模糊化
根據專家知識和操作者的經驗,總結出的模糊控制規則如表1~3所示,同時選擇重心法來進行反模糊化[11]。
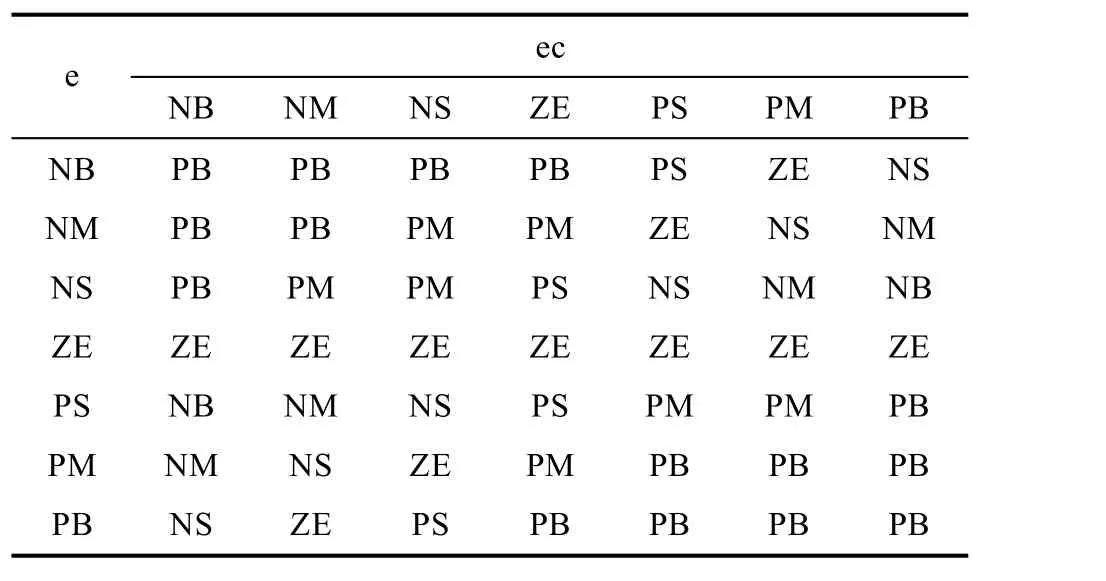
表1 pKΔ的模糊規則表Tab.1 Fuzzy reasoning table ofpKΔ
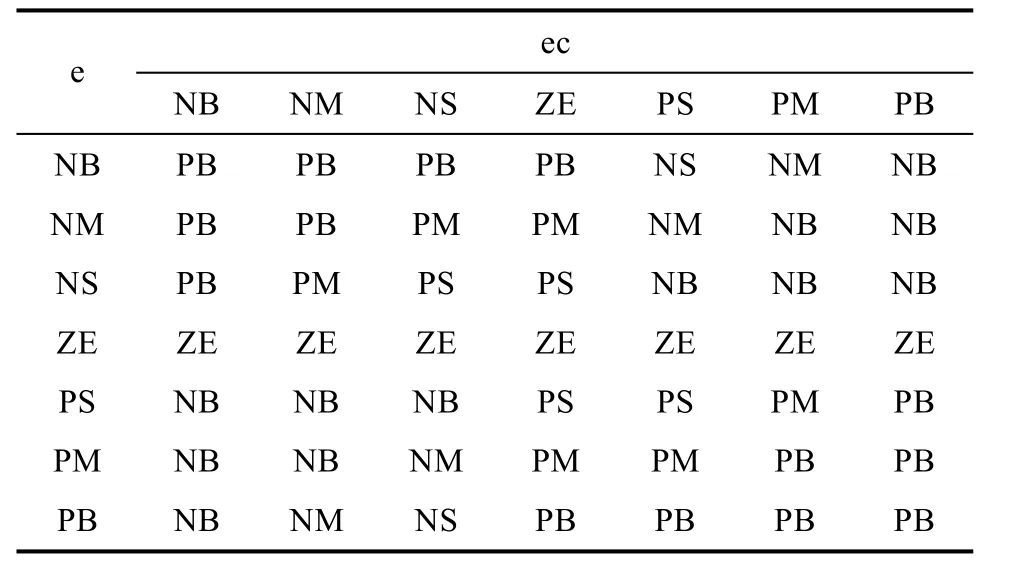
表2 ΔKi的模糊規則表Tab.2 Fuzzy reasoning table of ΔKi
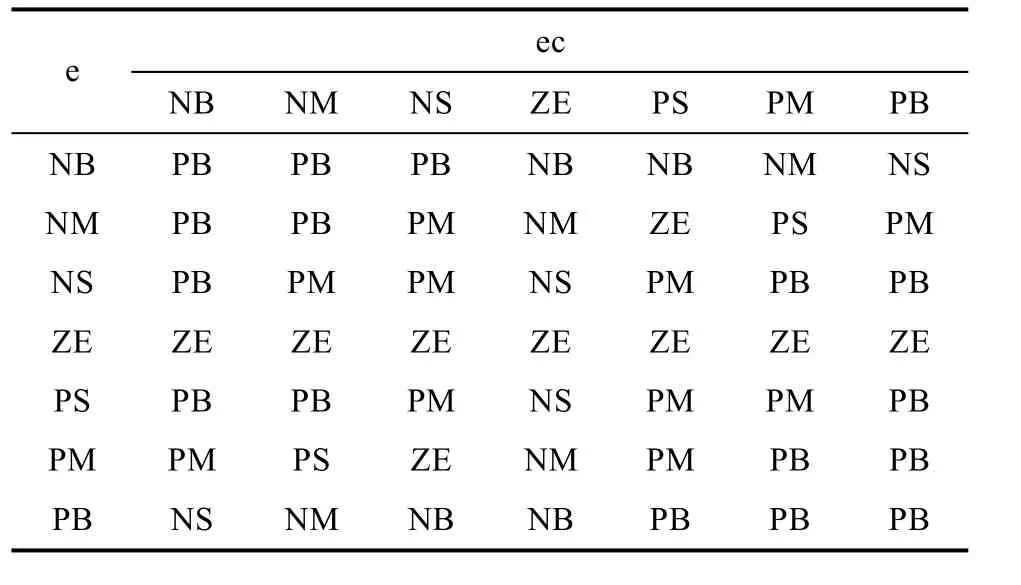
表3 ΔKd的模糊規則表Tab.3 Fuzzy reasoning table of ΔKd
2.2 基于遺傳算法的模糊PID控制器參數優化
經過公式計算所得的模糊PID控制器的量化因子與比例因子通常無法取得最優的控制效果,仍需要通過試湊法對其進行修改,本文中借助遺傳算法對其參數進行優化。
2.2.1 控制器優化模型
本文選取模糊控制中的偏差 e、偏差變化率 ec以及控制量輸出的量化因子 Ke、Kec、Ku和 PID控制器中的 3個修正系數pKΔ,iKΔ,dKΔ作為設計變量,每個設計變量的上、下限值如表4所示。
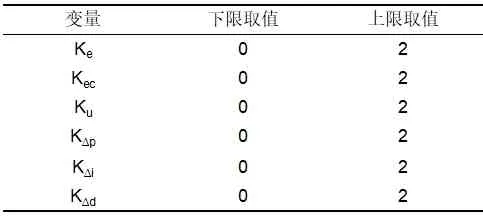
表4 設計變量的上、下限值Tab.4 Limits of design variables
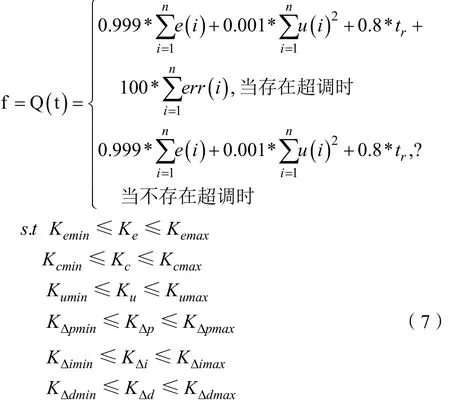
2.2.2 目標函數選取
對于控制系統來說,其性能評價分為動態性能指標和穩態性能指標兩類。其中,動態性能指標包括與系統響應速度相關的上升時間(rise time)tr、峰值時間(peak time)tp、調節時間(setting time)ts以及與系統阻尼程度相關的超調量(overshoot)σ%等;穩態性能指標包括與系統控制精度或抗擾動能力相關的穩態誤差(steady-state error)ess等。本文基于其中的上升時間(rise time)tr、超調量(overshoot)σ%以及穩態誤差(steady-state error)ess這三項性能指標來設計優化的目標函數。
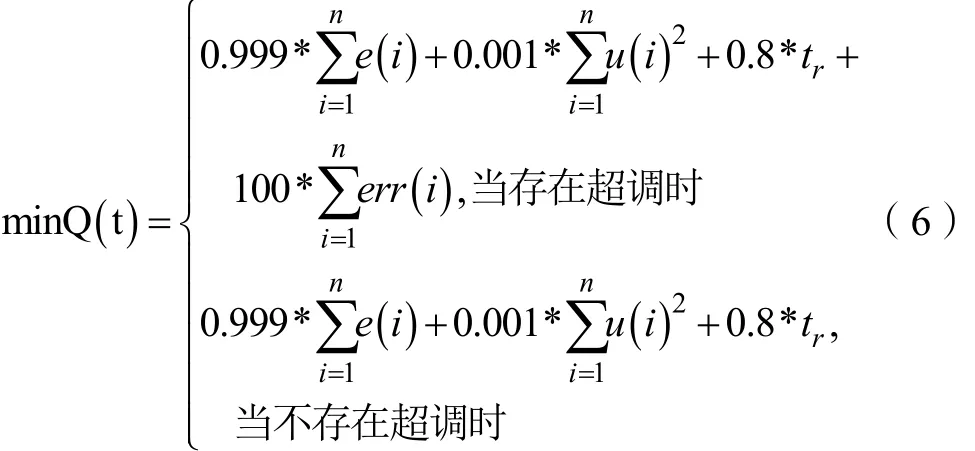
式中: Q(t)為目標函數;n為系統仿真的采樣點數;e為該時刻采樣點對應的偏差值;u為該時刻控制量的輸出值;tr為控制系統的上升時間;err為前一采樣時刻與后一采樣時刻的偏差值。
2.2.3 控制器的遺傳優化算法
遺傳算法是人工智能領域中解決最優化問題的一種高效的隨機搜索算法,其通過選擇運算、交叉運算、變異運算等操作,尋求一個對于種群有最大適應度的最優解[12]。
(1)染色體編碼
將優化模型中的6個變量從左到右依次連接成編碼串=(Ke,Kec,Ku,KpΔ,KiΔ,KdΔ),這樣的編碼串就代表種群中1個個體。每一個個體都是可行解,并根據表4產生初始種群。種群規模為50,并在迭代的過程中保持不變。
(2)適應度函數選擇
選取之前確定的目標函數作為遺傳算法有的的適應度函數,如式(7)所示。適應度越小,說明控制效果優良。
(3)選擇、交叉和變異操作
若選擇操作以較大的概率作用于種群,則適應度高的個體作為父代遺傳到下一代的概率就高,綜合考慮后選擇將概率設定為0.9。
交叉操作是按照較大的概率作用于個體,把兩個父代個體的部分結構加以替換重組,進而產生新個體,綜合考慮后選擇將交叉概率設定為0.8。
變異操作是以較小的概率改變個體的某些部位,生成新個體,綜合考慮后選擇將變異概率設定為0.02。
(4)終止條件
遺傳算法不僅可以用最大迭代次數來限制程序運行,還可以用適應度函數來判斷終止條件,綜合考慮后選擇用最大迭代次數作為優化的一個終止條件。當運行到指定的迭代次數時,遺傳算法程序會自動停止,并輸出最優解。最大迭代次數選擇60。
在優化過程中調用遺傳算法運行程序,整個優化程序的流程見圖3。
在采用遺傳算法優化控制器參數時將調用圖 4模型。模型輸出仿真過程中模糊PID控制器的輸出和控制模型的系統輸出,傳遞給遺傳算法的優化主程序進行適應度值的計算。當達到優化控制條件時,得到適應度值變化曲線,見圖5。

圖3 遺傳優化流程Fig.3 Process of genetic optimization
由圖5可以看出:最優個體的適應度函數值不斷減少,最終至 ,此時對應的最優個體為(Ke、Kc、(0.51,0.117,0.885,0.012,0.151,1.493)。
3 仿真結果分析
根據之前建立完成的模型和算法,以單位階躍響應作為輸入,在simulink中建立對應的模型進行仿真,將經過遺傳算法優化過后的模糊PID控制與優化前的模糊 PID控制以及常規 PID控制進行比較,仿真結果如圖 6。對以上三個控制系統的超調量,調節時間以及穩態誤差進行計算,結果見表5。從表可以看出:經過遺傳算法優化過后的模糊PID控制與優化前的模糊 PID控制以及常規 PID控制相比較,超調量、調節時間以及穩態誤差均有減少。
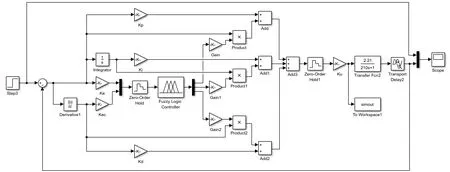
圖4 遺傳算法調用模型Fig.4 Invocation model of genetic optimization

圖5 遺傳算法優化結果Fig.5 Optimization result of genetic optimization
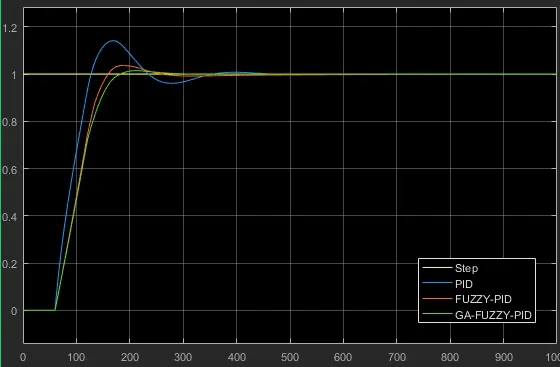
圖6 單位階躍響應控制效果比較Fig.6 Control effect comparison with unit step response

表5 單位階躍響應仿真結果Tab.5 simulation result with unit step response
4 結論
本文給出了一種基于遺傳算法優化的模糊 PID控制器的設計,其控制效果優于模糊PID控制以及常規PID控制,說明采用遺傳算法優化模糊PID控制參數是有效的,克服了常規手動調整參數所帶來的局限性。
優化后的超調量、調節時間以及穩態誤差都有所降低,說明基于遺傳算法優化的模糊PID控制器的控制性能優于模糊PID控制器以及常規PID控制器,能夠較好地提高糧食干燥機的控制效果。
[2] 李國昉, 毛志懷. 糧食干燥過程控制的研究現狀與發展方向[J]. 糧食與飼料工業, 2006, (4): 17-18. DOI: 10.3969/j.issn.1003-6202.2006.04.007.
[3] 孫書明. 連續式糧食干燥機控制系統研究[D]. 哈爾濱工程大學, 2008. DOI: 10.7666/d.y1437314.
[4] 趙波, 楊春暉, 王剛等. 基于模糊控制的糧食干燥機自動控制系統的研究[J]. 農業機械, 2011, (10): 109-111. DOI:10.3969/j.issn.1000-9868.2011.10.026.
[5] 趙強, 何法, 王鑫等. 基于遺傳算法優化的車輛主動懸架模糊PID控制[J]. 重慶理工大學學報(自然科學版), 2016,30(2): 6-11. DOI: 10.3969/j.issn.1674-8425(z).2016.02.002.
[6] 曹崇文, 汪喜波. 糧食干燥機的自動控制[J]. 現代化農業,2002, (2): 40-44. DOI: 10.3969/j.issn.1001-0254.2002.02.005.
[7] 代愛妮, 周曉光, 劉景云等. 糧食干燥過程的控制方案研究及特點分析[C]. //第15屆全國干燥技術交流會論文集.2015: 354-359.
[8] 王垚, 王長春. 基于模糊PID技術的振動式谷物烘干機溫度和水分控制系統的研究[J]. 中國農機化, 2006, (1):71-73. DOI: 10. 3969/j.issn.1006-7205.2006.01.023.
[9] SANGYONGMOON, WOOKHYUNKWON. Genetic-based fuzzy control for half-car active suspension systems[J].International Journal of Systems Science, 1998, 29(7): 699-710.
[10] 徐兵, 程旭德, 王宏利等. 基于Matlab的Mamdani與Sugeno型模糊推理研究[J]. 計算機應用, 2006, 26(z2):223-224.
[11] 劉斌, 尹曉峰, 丁珠玉等. 模糊 PID 在油菜籽熱風干燥控制系統的研究[J]. 西南師范大學學報(自然科學版),2016, 41(4): 109-114. DOI: 10.13718/j.cnki.xsxb.2016.04.020.
[12] 葛繼科, 邱玉輝, 吳春明等. 遺傳算法研究綜述[J]. 計算機應用研究, 2008, 25(10): 2911-2916. DOI: 10. 3969/j.issn.1001-3695.2008.10.008.
Application of Fuzzy PID Control Based on Genetic Algorithm in Grain Drying
NIE Fang, ZHOU Xiao-guang, DAI Ai-ni, XING Ying, WANG Hai-xia
(School of Automation, Beijing University of Posts and Telecommunications, Beijing 100876, China)
Aiming at the problem of the unsatisfactory control effect when traditional control algorithm was used in a grain dryer control system, a fuzzy PID control algorithm based on a genetic optimization algorithm was designed to implement the automatic control of grain dryer. The algorithm combines the advantages of fuzzy control and PID control, and uses the global optimization ability and parallel processing capability of genetic algorithm to optimize the quantification factors of fuzzy PID controller and the correction factors of PID parameters, and realizes the optimal control. The objective function which contains adjustment time, overshoot and steady state error of the control system was set up by using dynamic and steady state performance indexes of control system as comprehensive assessment indexes. Based on the established objective function, the parameters of the fuzzy PID controller were optimized by the genetic algorithm and the control effect of the conventional PID control and the conventional fuzzy PID controller were improved. Finally, the simulation and comparison of control performance were carried out in Matlab, and the simulation results indicate that the control effect of the fuzzy PID controller optimized by genetic algorithm for a grain dryer is superior to that of the fuzzy PID controller without optimization and the conventional PID control. The control algorithm can provide an effectiveness reference for the actual control strategy of grain drying.
Control theory; Fuzzy PID control; Genetic algorithm; Grain drying; Matlab simulation
國家糧食公益性行業科研專項經費資助(項目編號:No. 201413006)
聶放(1993-),男,碩士研究生,主要研究方向:控制理論與應用;代愛妮(1977-),女,博士研究生,主要研究方向:智能控制,糧食干燥控制;邢穎(1978-),女,講師、碩導,主要研究方向:軟件測試、人工智能;王海霞(1991-),女,碩士研究生,主要研究方向:物流系統信息化及網絡化。
周曉光(1957-),男,教授、博導,主要研究方向:自動化物流系統,物聯網技術及其應用。
TP15
A
10.3969/j.issn.1003-6970.2017.12.007
本文著錄格式:聶放,周曉光,代愛妮,等. 基于遺傳算法優化的模糊PID控制在糧食干燥中的應用[J]. 軟件,2017,38(12):37-41
10.7666/d.y705124.
猜你喜歡
品牌研究(2022年27期)2022-09-28 00:30:14
品牌研究(2022年26期)2022-09-19 05:54:48
房地產導刊(2022年5期)2022-06-01 06:20:14
快樂語文(2021年36期)2022-01-18 05:49:06
小天使·一年級語數英綜合(2021年10期)2021-10-20 02:41:35
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中國糧食經濟(2018年11期)2018-12-27 08:58:42