基于機器人的曲線焊接系統(tǒng)
2017-12-29 05:46:13駱德陽
電焊機 2017年11期
關(guān)鍵詞:焊縫
楊 芹 ,駱德陽 ,李 銅 ,劉 琦 ,陳 鋮
(1.西南交通大學(xué) 材料科學(xué)與工程學(xué)院,四川 成都 610031;2.西華大學(xué)材料科學(xué)與工程學(xué)院,四川成都610039)
基于機器人的曲線焊接系統(tǒng)
楊 芹 1,駱德陽 1,李 銅 2,劉 琦 1,陳 鋮1
(1.西南交通大學(xué) 材料科學(xué)與工程學(xué)院,四川 成都 610031;2.西華大學(xué)材料科學(xué)與工程學(xué)院,四川成都610039)
針對曲線結(jié)構(gòu)工件的人工焊接效率低、焊接質(zhì)量不穩(wěn)定、人工勞動強度大等問題,基于機器人設(shè)計出一種高效率和高精度的焊接系統(tǒng)。本系統(tǒng)采用機器人與PLC聯(lián)合控制變位機的翻轉(zhuǎn)和回轉(zhuǎn),使待焊工件的焊縫始終處于平焊或船形焊位置,利用觸摸屏設(shè)置翻轉(zhuǎn)速度和顯示整個控制系統(tǒng)的工作狀態(tài),通過機器人與焊機的通訊及機器人在線示教編程,實現(xiàn)曲線結(jié)構(gòu)工件的自動化焊接。為了保證焊接質(zhì)量,采用接觸傳感和電弧傳感功能精確尋位和實時修正示教軌跡。經(jīng)實際應(yīng)用表明,系統(tǒng)運行良好,達到了預(yù)期設(shè)計目標(biāo)。
曲線結(jié)構(gòu)工件;機器人;焊接系統(tǒng)
0 前言
目前曲線結(jié)構(gòu)的小型工件大多采用手工焊方式,對焊工技術(shù)要求高、人工勞動強度大,焊接質(zhì)量難以保證。因此,引入焊接自動化設(shè)備十分必要,而焊接機器人和焊接專機是實現(xiàn)焊接自動化的兩種重要方式。焊接專機是為一種或幾種工件的焊接而設(shè)計的專用設(shè)備,對于曲線結(jié)構(gòu)小型工件的焊接優(yōu)勢不明顯;而焊接機器人是一種柔性的焊接設(shè)備,通過更改程序即可實現(xiàn)曲線結(jié)構(gòu)小型工件的焊接[1]。隨著計算機技術(shù)、信息控制技術(shù)和人工智能技術(shù)的不斷發(fā)展,越來越多的機器人應(yīng)用于工業(yè)生產(chǎn),既保證了焊接質(zhì)量又降低了工人勞動強度和生產(chǎn)成本[2-3]。對于復(fù)雜工件的焊接,受焊接機器人臂長和自由度的限制,焊槍難以到達某些焊縫,需加入焊接變位機拖動工件使相應(yīng)焊縫處于理想的焊接位置,以方便機器人進行焊接操作[4]。本研究設(shè)計了一種基于機器人的曲線焊接系統(tǒng),采用機器人和PLC聯(lián)合控制變位機旋轉(zhuǎn)和翻轉(zhuǎn),使待焊曲線焊縫處于最佳焊接位置,然后機器人進行自動焊接。
1 系統(tǒng)整體設(shè)計
弧形結(jié)構(gòu)件如圖1所示,屬于曲線結(jié)構(gòu)件的一種。它有4條在不同面上的弧焊縫(半V坡口),為方便機器人焊接,采用座式變位機調(diào)整焊縫空間位置。為了提高焊接生產(chǎn)效率,設(shè)置3個工位。其中工位1和工位3為固定工位,均由柔性平臺構(gòu)成,用于曲線結(jié)構(gòu)件的組對;工位2由變位機構(gòu)成,用于曲線結(jié)構(gòu)工件的焊接。只需更換焊接工裝或夾具并改變機器人程序,即可焊接曲線結(jié)構(gòu)工件。工位布局如圖2所示。

圖1 弧形工件
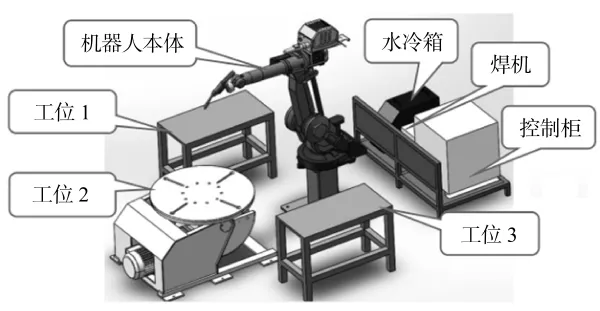
圖2 工位布局
2 電氣控制系統(tǒng)設(shè)計
焊接系統(tǒng)由庫卡機器人本體、機器人控制器、焊機、PLC、觸摸屏、接觸傳感器及電弧傳感器組成,其框架如圖3所示。采用西門子TP700 Comfort的觸摸屏作為人機交互界面,通過DeviceNet總線實現(xiàn)機器人與焊機之間的實時通訊。由PLC和機器人聯(lián)合控制變位機翻轉(zhuǎn)和旋轉(zhuǎn),保證焊縫處于平焊或船型焊接位置。

圖3 焊接系統(tǒng)框架
考慮曲線結(jié)構(gòu)工件的焊接特點和生產(chǎn)成本,采用PLC控制變位機的翻轉(zhuǎn),通過控制變頻器的輸出頻率來改變變位機的翻轉(zhuǎn)速度。變位機的翻轉(zhuǎn)控制方式分為手動和自動控制兩種。
為了使空間復(fù)雜曲線焊縫始終處于最佳焊接位置,需要變位機與機器人在焊接過程中同步協(xié)調(diào)運動,即在焊接過程中變位機需要一直做旋轉(zhuǎn)運動使焊縫處于最佳焊接位置,同時機器人調(diào)整焊槍位置和姿態(tài),對焊縫實施焊接。為了方便工人現(xiàn)場操作,在示教功能上設(shè)置跟隨運動控制,即當(dāng)變位機運動時,機器人跟隨運動,并與變位機保持相對關(guān)系。通過外部軸的示教控制和機器人的示教控制,生成了外部軸動作程序1和機器人動作程序2。同時啟動程序1和程序2,即可實現(xiàn)機器人與外部軸的協(xié)調(diào)運動[5]。
3 系統(tǒng)控制流程
幾何尺寸和位置誤差以及焊接過程中工件受熱引起的變形都會導(dǎo)致實際焊縫位置偏離示教軌跡。為了保證焊接質(zhì)量的可靠性,系統(tǒng)采用接觸傳感器和電弧傳感器進行精確尋位和實時修正示教軌跡。
接觸傳感器工作原理如圖4所示。當(dāng)焊絲未接觸工件待檢測位置時,由焊接電源、繼電器焊絲和工件構(gòu)成的回路A處于斷開狀態(tài),繼電器并未得電,機器人控制柜內(nèi)的直流電源與繼電器的常開觸點相連的回路B也處于未接通狀態(tài)。當(dāng)焊絲與工件待檢測位置接觸并發(fā)生短路時,回路A閉合使繼電器得電,其常開觸點閉合,使回路B接通后產(chǎn)生一個電壓信號,機器人控制柜檢測到此電壓信號時,記錄焊槍所在的空間位置和角度。
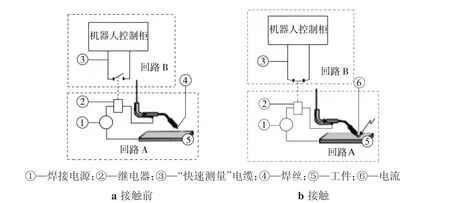
圖4 接觸傳感器工作原理
示教時,先將焊絲與工件上指定的焊接起始點接觸,機器人控制系統(tǒng)通過接觸傳感功能記錄此起始位置作為基準(zhǔn)位。
實際焊接中,在尋找相應(yīng)焊縫的起始位置時,接觸傳感檢測出一個新位置,機器人控制系統(tǒng)則比較該位置與基準(zhǔn)位置得出偏差量,然后根據(jù)偏差量計算出補償量,并將補償量反映到實際焊接起始位置上。
在焊接過程中,工件受熱不均引起熱變形,導(dǎo)致示教軌跡偏離焊縫實際位置。本研究采用KUKA Arc Sense分流器箱Basic修正焊接軌跡。分流器箱含有電弧傳感器,在擺動焊接時可以根據(jù)焊接電流反饋值的變化尋找焊縫中心,實時修正示教軌跡偏差。由于焊接電弧的長度與焊絲干伸長成正比,而焊絲干伸長與電流成反比,因此,焊接電流的變化可以反映擺動中心與坡口中心的偏移,如圖5所示。
若實際焊縫位置未偏離示教軌跡,則焊槍擺動到左右極限位置時的焊接電流相同,無需修正機器人示教軌跡;若實際焊縫位置偏向示教軌跡左側(cè),則左側(cè)極限位置的焊接電流變大,此時機器人軌跡需要向右側(cè)修正;若實際焊縫位置偏向示教軌跡右側(cè),則右側(cè)極限位置的焊接電流變大,此時機器人軌跡需要向左側(cè)修正。
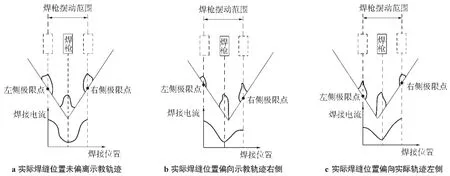
圖5 電弧傳感原理
示教時,首先打開主電源給機器人上電,系統(tǒng)初始化完成后選擇示教模式,然后建立新程序,并選擇合適的坐標(biāo)系,根據(jù)示教原則,對于圓弧焊縫通常需要3個屬性點采用圓弧插補方式確定示教軌跡,如圖6所示。利用接觸傳感器找到焊縫的起始點P1、焊縫中間點P2和焊縫結(jié)束點P3,然后采用圓弧插補方式確定焊縫位置。通過變位機的翻轉(zhuǎn)和旋轉(zhuǎn)使每條焊縫均處于最佳焊接位置,然后按照上述方式完成所有焊縫的示教,示教流程如圖7所示。完成工位2的裝件工作后,通過示教器調(diào)出相應(yīng)工件的焊接程序,按下啟動鍵,機器人通過接觸傳感器找到焊接起始點,并按照示教程序進行焊接。在焊接過程中,電弧傳感器實時檢測焊縫,并根據(jù)偏差量調(diào)整示教軌跡,完成焊接任務(wù)。同時,操作人員可以在工位1或工位3進行曲線結(jié)構(gòu)工件組對。

圖6 圓弧示教軌跡

圖7 示教流程
4 結(jié)論
設(shè)計的基于機器人的曲線焊接系統(tǒng)經(jīng)過實際應(yīng)用,其運行情況良好,焊接位置精確,各項指標(biāo)都滿足設(shè)計要求。本系統(tǒng)具有以下優(yōu)點:
(1)自動化程度高,工人只需裝卸工件操作,降低了工人的勞動強度。
(2)采用機器人焊接,通過更換工裝或夾具和調(diào)用相應(yīng)工件的焊接程序,就可以完成曲線結(jié)構(gòu)件的焊接,提高了生產(chǎn)效率。
(3)采用接觸傳感器和電弧傳感器可以精確尋位和實時修正示教軌跡,保證了焊接質(zhì)量。
[1]劉麗麗.汽車連桿類焊接專機的設(shè)計[D].遼寧:沈陽工業(yè)大學(xué),2008.
[2]哈恩晶.焊接機器人的應(yīng)用現(xiàn)狀與發(fā)展趨勢[J].熱加工,2004(5):16-18.
[3]莫金逐.焊接機器人在機械制造領(lǐng)域中的應(yīng)用及發(fā)展趨勢[J].現(xiàn)代焊接,2016(8):8-10.
[4]李志慧.大型堆焊變位機關(guān)鍵技術(shù)研究[D].河北:河北工業(yè)大學(xué),2006.
[5]邵秋萍,劉極峰,王孜凌.基于外部軸控制的塞拉門機器人弧焊工作站[J].機械設(shè)計與制造,2006(9):117-119.
Research on curve welding system based on robot
YANG Qin1,LUO Deyang1,LI Tong2,LIU Qi1,CHEN Cheng1
(Southwest Jiaotong University,Material Science and Engineering institute,Chengdu 610031,China;2.Xihua University,Material Science and Engineering institute,Chengdu 610039,China)
In order to solve the problems of low efficiency and labor-intensive of manual welding and unstable welding quality of the curved structure workpiece,a welding system with high efficiency and high precision based on robot is designed.The system adopts PLC and robot to control the rotation and revolution of the positioner,which makes the welds always in the fillet welding position,and a touch screen is used to set up the speed of revolving and display the working state of the whole control system.The automatic welding of the curved structure workpiece is realized through the communication between the robot and the welding machine and the online teaching programming of the robot.In order to guarantee the welding quality,the contact sensing and arc sensing functions are used to precisely locate and modify the teaching track.The application result shows that the system has a good effect and achieves the desired design goals.
curved structure workpiece;robot;welding system
TG409
A
1001-2303(2017)11-0067-04
10.7512/j.issn.1001-2303.2017.11.14
本文參考文獻引用格式:楊芹,駱德陽,李銅,等.基于機器人的曲線焊接系統(tǒng)[J].電焊機,2017,47(11):67-70.
2017-09-15
楊 芹(1989—),女,在讀碩士,主要從事焊接設(shè)備及其自動化的研究。E-mail:swjtu-yq@foxmail.com。
猜你喜歡
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
裝備制造技術(shù)(2021年1期)2021-05-21 07:55:04
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
制造技術(shù)與機床(2018年12期)2018-12-23 02:40:58
石家莊鐵路職業(yè)技術(shù)學(xué)院學(xué)報(2017年4期)2017-05-25 13:26:35
制造業(yè)自動化(2017年2期)2017-03-20 14:26:13
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:24
機電信息(2015年3期)2015-02-27 15:54:47
機械工程師(2015年9期)2015-02-26 08:38:15
水電站機電技術(shù)(2014年4期)2014-10-13 08:30:07
