重于水型AUV模糊路徑規劃與優化
2017-12-28 07:59:12俞炅旻
艦船科學技術 2017年12期
俞炅旻,吳 超,趙 敏,葛 彤
(上海交通大學 船舶海洋與建筑工程學院,上海 200240)
重于水型AUV模糊路徑規劃與優化
俞炅旻,吳 超,趙 敏,葛 彤
(上海交通大學 船舶海洋與建筑工程學院,上海 200240)
為了實現重于水型自治潛器(Heavier-Than-Water Autonomous Underwater Vehicle, AUV)在未知水下環境中的局部路徑規劃。首先根據AUV的運動方程和機翼升力特性,在M atlab中建立動力學模型。設計模糊控制器,以聲吶對障礙物探測得到的距離和方位信息作為輸入量,實現了AUV在水下障礙物環境中的路徑規劃。最后,為提高AUV的能量利用效率,用遺傳算法對模糊控制器的隸屬度函數進行優化,并通過仿真試驗證明了優化后AUV在避障期間能源消耗更少,說明該路徑規劃方法具有實際應用價值。
重于水型AUV;模糊路徑規劃;遺傳算法;避障
0 引 言
重于水型自治潛器(簡稱AUV)的局部路徑規劃是指在未知的水下環境中,潛水器根據傳感器對環境的探測,自行規劃得到一條無碰撞路徑。AUV如何根據規劃算法實時地推理出下一步的行進路線,是局部路徑規劃的關鍵。比較典型的方法有Khatib提出的人工勢場法[1],但該算法易陷入局部最小點,存在目標不可達問題[2]。另一種方法是根據Zadeh在1965年提出的模糊集合理論發展而來的模糊路徑規劃方法,通過把人的經驗歸納為模糊規則來控制AUV在水下未知環境中進行路徑規劃。目前,陳衛東[3]、付宜利[4]通過與傳統規劃方法的對比, 論證了模糊路徑規劃的有效性。孫兵[5]、楊敬輝[6]等學者使用智能算法對模糊控制器進行優化,獲得了更好的路徑規劃效果。但是上述
優化大多以優化路徑為目標,未考慮系統的節能等因素,且應用對象很少是AUV。本文針對水下潛器的運動特性設計了模糊控制器,實現了AUV的局部路徑規劃。考慮到模糊控制器很大程度上依賴于專家經驗,可能會造成能源的浪費,故將遺傳算法應用于模糊控制器的優化設計,通過選擇AUV的主要耗能裝置螺旋槳的轉速作為評價指標,實現了AUV局部路徑規劃時消耗更少的系統能源。該方法的有效性通過仿真得到驗證。
1 模型
1.1 重于水型AUV模型
重于水型AUV配置了機翼,不依靠浮力而是通過潛水器航行中獲取的流體升力平衡其在水中的剩余重量。不需要安裝龐大的浮力部件,其體積遠小于常規的潛水器,能夠在速度、成本、機動性等方面體現其優勢。大范圍巡航作業過程中使升力大致與AUV水中重量相等,并由操縱面對AUV姿態進行調整[7]。模型以上海交通大學水下工程研究所的“飛魚”Ⅱ重于水型AUV為原型,其外形如圖1所示。
潛水器的運動方程可以表示為非線性微分方程[8],見式(1)。
其中:M為剛體質量和附加質量矩陣; C(v)為剛體轉動慣量和科氏力矩陣; D(v)為線性和二次水動力項矩陣;g(η)為重力和浮力項;;;Min, Nin]T。
η為大地坐標系下AUV的位置和歐拉角信息;ν為體坐標系中的(角)速度信息;τ為輸入的力(矩)。其中,η和ν之間存在轉換關系,為大地坐標系與體坐標系之間的映射矩陣,表示為式(2),具體形式參考文獻[9]。
“飛魚”Ⅱ型AUV在水中重力 P 大于浮力 B,且方向總是鉛錘的,故在大地坐標系中分量為。根據大地坐標系到體坐標系的轉換矩陣(具體參考文獻[10]),將其轉換到體坐標系中,表示為靜力項,見式(3)。其中,浮心坐標為,重心坐標為(已省略)。
“飛魚”Ⅱ型的機翼布置于AUV重心正上方,在運動中將產生升力,在體坐標系中的分量表示為,再將其加入到式(1)的輸入項τ中。升力L由式(4)給出。其中,升力系數CL估算公式由式(5)給出,是攻角為0時機翼的升力系數。為不考慮機翼和艇體干擾的升力系數隨攻角的變化率。根據機翼面積和潛水器的主尺度l,可將其轉換為考慮相互干擾的升力系數變化率。
對式(1)線性化簡和移項,得到重于水型AUV的空間運動狀態方程,見式(6)。其中是線性化簡后的矩陣,由于AUV速度較慢,故忽略。根據式(6)建立動力學模型,迭代求解微分方程可解得在特定輸入下,潛水器的速度狀態ν,繼而由轉換關系可以得到潛水器的位姿狀態。
1.2 聲吶模型
未知的水下環境中,AUV需要通過聲吶獲取周圍障礙物的分布情況,并根據障礙物的距離推理出適當的轉速與舵角,進行局部路徑規劃。仿真中依據實際聲吶參數建立聲吶模型,模擬聲吶對未知水下障礙物的探測。重于水型AUV使用某型避障聲吶,聲吶水平開角范圍,最大探測距離200 m,如圖3所示。聲吶返回的數據為障礙物3個邊緣點(A, B,C點)與聲吶的距離[11]。在仿真中,只取首向(0°)、+45°和–45°三個方向障礙物距AUV最近點的距離信息作為模糊控制器的輸入量,若障礙物距離大于聲吶探測距離則返回最大探測距離。
2 模糊控制器計與優化
AUV在水下的低速運動可以解耦為水平面和垂直面2個平面空間的運動,本文設計的模糊控制器實現的是水平面內的局部路徑規劃,AUV的深度由單獨的深度控制器控制,擬采用S面控制器[12]。模糊控制器的輸出為垂直舵的舵角和螺旋槳轉速。模糊控制器的主要結構包括:模糊化模塊、知識庫、模糊推理模塊和清晰化模塊4部分,如圖4中虛線框部分。圖4為遺傳算法優化的模糊路徑規劃系統。
2.1 模糊語言變量定義
模糊控制器5個輸入量為:
2)目標方向(Direction)表示目標位置和體坐標原點連線與AUV首向的夾角,如圖2所示,包含{Left, M iddle, Right}3個集合。
3)AUV當前的“速度(Speed)”包含{Slow,Fast}2個集合。
模糊控制器2個輸出量為:
“舵角(Rudder)”和螺旋槳的“轉速(RPM)”,為了實現對輸出量較為精細地控制,舵角和轉速分別劃分為5個模糊集合,分別為{BRight, SRight, M idd le,SLeft, BRight}和{NB, NS, ZZ, PS, PB}。
2.2 隸屬度函數設計
AUV具有轉向半徑較大和欠驅動等特點。所以,需要根據其特點專門設計隸屬度函數和模糊規則庫。設計如下:
1)語言變量“距離”的隸屬度函數采用不對稱的設計,形狀為梯形,論域為[–1,1],如圖5(a)所示,整體偏向右側,即AUV更加傾向于將障礙物距離判斷為Near,保證其與障礙物之間留有足夠的安全距離。但是這樣做也可能導致規劃路徑變長、能耗增加,因此后面將對隸屬度函數進行優化。
2)目標方向隸屬度函數為對稱設計,障礙物在首向左側為負,右側為正,如圖5(b)所示。
3)速度隸屬度函數如圖5(c)所示。
4)輸出量舵角(Rudder)和轉速(RPM)的隸屬度函數形狀一致,皆如圖5(d)所示。
2.3 模糊控制規則庫
完成隸屬度函數的設計后,根據經驗定義模糊規則庫,作為AUV路徑規劃的指導規則。該模糊控制器總共有5個輸入,每個輸入量包含的模糊集合數量分別為 2,2,2,3,2,所以該模糊規則庫共有 2×2×2×3×2=48條規則,部分模糊規則見表1。
2.4 遺傳算法優化
上面設計的隸屬度函數很大程度上依賴于專家的經驗知識[13],可能無法適應所有的水下障礙物環境,且浪費系統能源。對此本文采用遺傳算法來優化隸屬度函數的設計,進一步提高模糊路徑規劃的可靠性和能量利用率。
遺傳算法優化的主要運行流程如圖6所示:
1)初始種群生成。首先產生包含30個個體的“種群”,個體的基因選擇為隸屬度函數圖5中標注拐點處的橫坐標值,表示為向量,。基因M為實數向量,代表一個個體,對應著一種模糊控制器。初始種群的生成是在設定的定義域內隨機產生實數向量M。
2)仿真測試。調用每個個體設置模糊控制器,控制AUV進行路徑規劃,并返回AUV的運行結果。
3)計算適應度。在單個個體控制AUV進行避障路勁規劃后,選取推進器在運動期間的總旋轉圈數(簡稱總轉數)作為種群中每個個體的適應度評價指標,見式(7)。并線性地給每個個體分配適應度,見式(8)。總轉數越低,適應度越大,即個體基因有更大概率遺傳到下一代;反之就越小,更容易被淘汰(碰到障礙物的個體直接被淘汰)。

表1 模糊規劃規則表Tab. 1 Fuzzy control rules
5)選擇。根據每個個體的適應度,運用輪盤賭選擇法對個體進行選擇。
6)最后進行復制、變異和交叉操作,產生新種群。基因交叉的概率設置為80%,變異概率為8%。然后重復步驟 2 ~ 步驟 5。
3 結果與分析
為了加速優化過程,首先在簡單障礙物環境中進行路徑規劃和遺傳算法的優化。優化仿真中種群繁衍至第12代停止,每一代的總能耗(使用種群平均的總轉數表示)如圖7所示。可以看出,經過一代進化,由于初始種群中一些適應度很低的個體被淘汰,種群的總能耗已有了大幅降低;隨后每代種群總能耗平穩收斂,直到滿足種群差異性的要求,結束優化。末代種群中的最優個體總轉數為,選取此個體的基因作為優化后的隸屬度函數。
優化前,模糊控制器隸屬度函數的定義如圖5所示,其基因(拐點橫坐標)為M=[0.4 0.4 0.8 0.8, 0.25 0 0.25, 0.2 0.2 0.8 0.8];優化后的基因為[0.581 0 0.553 5 0.997 7 0.956 8 0.216 1 0.042 9 0.762 2 0.064 2 0.017 7 0.716 5 0.761 1]。優化前后的模糊控制器控制下AUV路徑規劃期間的轉速和路徑對比如圖8和圖9。可以看出優化后AUV在路徑規劃期間轉速明顯降低,且路徑規劃運動總時間與優化前基本持平,均為180 s左右。
為了驗證優化后模糊路徑規劃的可靠性和節能特性,本文設置了更加復雜的環境,檢驗AUV在不同環境中是否能達到快速、節能的目標。圖10為復雜環境中AUV路徑規劃期間轉速的對比,其具體性能比較見表2。可以看出避障機動期間(曲線凹陷部分),優化后的AUV轉速更低。雖然時間有略微增加,但是總體來說總轉數降幅更加明顯。圖11是優化前后AUV規劃路徑的對比。說明優化后的模糊控制器可以適應復雜的水下環境,并控制AUV更加節能地完成局部路徑規劃任務。
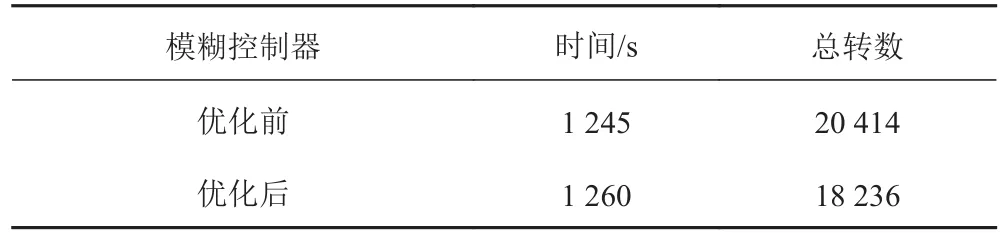
表2 路徑規劃性能比較Tab. 2 Comparison of path planning performance
4 結 語
本文建立了重于水型AUV的動力學模型,為其設計了模糊控制器,并使用遺傳算法對控制器進行優化。優化后的模糊控制器使重于水型AUV可以在未知水域中更加節能地完成路徑規劃任務,對于提高能量利用效率具有重要意義。模糊控制器輸入輸出量嚴格對應實際潛水器,可通過離散化的方式將控制器翻譯為C語言,并移植到水下嵌入式平臺上,對于實現重于水型AUV在水下環境中的局部路勁規劃具有重要的應用價值。
[1]KHATIB O.Real time obstacle avoidance for manipulators and mobile robots[J].International Journal of Robotics and Research,1986,5(1),90–98.
[2]LIY ing,HONG Sheng,HUANG Jun,et al.The new environment model building of penetration mission based on the artificial potencial field approach[C].Proc of 2012 IEEE International Muti-Disciplinay Conference on Congnitive Methods in Situation Awareness and Decision Support,2012:121–124.
[3]陳衛東,朱奇光.基于模糊算法的移動機器人路徑規劃[J].電子學報,2011,(04):971–974,980.
[4]付宜利,靳保,王樹國,等.未知環境下基于行為的機器人模糊路徑規劃方法[J].機械工程學報,2006,(05):120–125.
[5]孫兵,朱大奇,楊元元.基于粒子群優化的自治水下機器人模糊路徑規劃[J].高技術通訊,2013,12:1284–1291.
[6]楊敬輝,洪炳镕,樸松昊.基于遺傳模糊算法的機器人局部避障規劃[J].哈爾濱工業大學學報,2004,07:946–948.
[7]顏翚,葛彤,王彪.一種新型重于水的自治式潛水器及其先進性分析[J].上海交通大學學報,2012,08:1173–1177.
[8]SARKARM,NANDY S,K VADALIS.R,etal.Modelling and simulation of a robust energy effcient AUV controller[J].Mathematics and Computers in Simulation,2016,121:34–47.
[9]FOSSEN.guidance and control of ocean vehicles[M].Norway,1994.
[10]施生達.潛艇操縱性[M].北京:國防工業出版社,1995.
[11]毛宇峰,龐永杰,李曄,等.速度矢量坐標系下水下機器人動態避障方法[J].哈爾濱工程大學學報,2010,02:159–164.
[12]劉建成,于華男,徐玉如,等.水下機器人改進的 S 面控制方法[J].哈爾濱工程大學報,2002,23(1):33–36.
[13]孫增圻.智能控制理論與技術[M].北京:清華大學出版社,1996.
Fuzzy path planning and optimization of a heavier-than-water AUV
YU Jiong-min, WU Chao, ZHAO M in, GE Tong
(School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
In order to achieve the goal of local path planning of a Heavier-Than-Water AUV in unknown underwater environment. A matlab kinematic model of the AUV was built based on its equation of motion and lift characteristics. A fuzzy controller was designed that enables AUV to plan path in real time. The controller takes obstacles' distance and orientation obtained from the sonar as input to control the AUV. At last, genetic algorithm was used to optimize the membership function of the fuzzy controller for improving energy utilization. And simulation tests showed that AUV consumed less energy during obstacle avoidance stage after optimization, which proved that the path planning method has practical value.
Heavier-Than-Water AUV;fuzzy path planning;genetic algorithm;obstacle avoidance
TP242
A
1672–7649(2017)12–0076–05
10.3404/j.issn.1672–7649.2017.12.016
2017–04–06
國家重大儀器研制資助項目(41427806)
俞炅旻(1992–),男,碩士研究生,研究方向為水下航行器的運動控制和基于視覺的水下對接。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41