基于模糊理論的水下航行器運動控制及仿真研究
2017-12-28 07:59:04胡錦暉胡大斌肖劍波
艦船科學技術 2017年12期
胡錦暉,胡大斌,肖劍波
(海軍工程大學,湖北 武漢 430033)
基于模糊理論的水下航行器運動控制及仿真研究
胡錦暉,胡大斌,肖劍波
(海軍工程大學,湖北 武漢 430033)
為消除傳統模糊控制存在的控制盲區,采用模糊控制與PID控制結合的控制方案。針對現有變論域模糊控制運算量大、推理規則利用率低等缺點,提出分級變論域的方法,設計某型水下航行器相應的模糊PID控制器,并利用計算機進行仿真試驗。結果表明,相較于傳統PID控制,在水下航行器深度及縱傾控制中,模糊PID控制器具有速度快、超調小及穩定時間短等特點,對于復雜非線性對象的控制器設計有著較好的借鑒意義。
水下航行器;控制;模糊理論
0 引 言
為降低勞動強度并減少人為事故,各國海軍都將水下航行器操縱的自動控制與仿真研究放在重要位置。目前已經形成了較為通用的控制算法,PID控制是部分水下航行器自動舵采用的控制算法。經典的PID算法依賴于水下航行器運動數學模型,其控制效果受模型影響較大。一些大型的水下航行器由于慣性較大,同時耦合性、非線性及時變性較強,并且易受干擾,其運動過程難以用數學模型準確描述,一般的控制算法難以適應這種復雜的控制對象。
模糊控制是智能控制中發展較為成熟的一種方法。水下航行器的運動控制就是一個具有復雜特性的控制對象,一般常規控制方法的效果并不理想。作為智能控制的一種,模糊控制具有很多傳統控制方法所沒有的優點,它可以充分運用專家經驗,對數學模型的精確性要求不是很高,具有較好的魯棒性,在某些領域具有一定的優勢。對于水下航行器來說,相較水面船舶而言增加了首部潛浮舵和尾部潛浮舵,以控制深度及縱傾。因此,深度和縱傾是其重要的控制參數。本文以模糊控制理論為基礎,研究適用于水下航行器運動的模糊PID控制算法,并以深度和縱傾控制為例進行控制器設計及仿真研究。
1 模糊PID控制器
將模糊控制與PID控制相結合,產生模糊參數自整定PID控制器,以模糊控制器在線調整PID控制器的參數,使其更加適應于時變性、非線性的復雜控制對象。
對于一般的模糊控制器,其論域一旦確定之后,就不再改變。在很多控制系統中,誤差的變化范圍很大,在初始階段,誤差的絕對值一般會較大,在接近于穩定時,誤差的絕對值較小。這就給模糊控制器的設計帶來了困難,為了充分包含誤差的變化范圍,將論域定的較大,而為了防止推理規則過于復雜,模糊集不能取得過密。這樣一來,當誤差的絕對值較小時,會使模糊控制器的靈敏度降低,并且會出現較大的控制盲區。變論域模糊控制將論域隨著誤差變化而伸縮,但是推理規則形式保持不變。誤差減小時,論域收縮使模糊集加密,提高精度;誤差增大時,論域膨脹使模糊集稀疏,提高運算速度。論域的膨脹與收縮如圖1所示。
對于初始7個模糊集的模糊控制器,通過增加模糊集的方法和收縮論域的方法對其進行改進,2種方法的對比如表1所示。可以看出,增加模糊集的方法會使推理規則數急劇增加,靈敏度的變化幅度卻較少;而收縮論域的方法卻能保持推理規則數不變,靈敏度的變化可以根據實際情況設定。
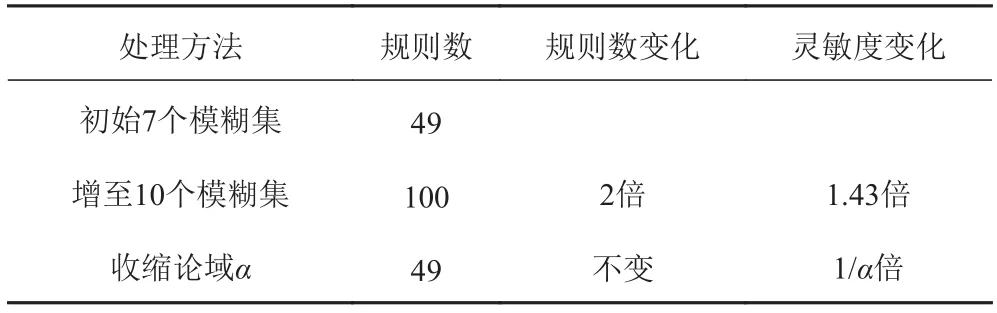
表1 改進方法的對比Tab. 1 Contrast of improved method
伸縮因子應滿足下列條件
3)α(u)在[0,E]上單調增;
目前,較為常用的伸縮因子如式(2)所示
按照這種變論域的方法,在運算過程中的每一步都要重新確定論域,劃分模糊集,而推理規則卻只使用一條,下一步又要重新計算,造成了計算的復雜和不必要的浪費。本文參考變論域思想,結合具體被控對象的特點,提出分級變論域方法,即根據誤差變化的范圍由大到小設計3~4個論域。這樣在誤差變化過程中,逐漸進入較小論域,模糊集逐漸加密,控制精度逐漸提高,最終誤差穩定在較小論域內,并能充分發揮其各條推理規則,既可以簡化控制算法,又能得到較好的效果。論域變化規則見表2所示。

表2 論域變化規則Tab. 2 Rule of shrinking and expanding of the universe
2 某型水下航行器深度縱傾模糊PID控制研究
2.1 水下航行器深度縱傾控制
水下航行器與水面船舶最大的區別在于其主要在水下活動,可以實施垂直面上的機動,與之相應的,水下航行器的首部潛浮舵和尾部潛浮舵(一般簡稱為首舵與尾舵),以實現對深度及縱傾的控制。一般情況下,水下航行器改變深度的手段主要有:壓載水艙注排水、操首舵及尾舵。當航行器處于水面狀態時,其下潛過程大致為:首先,向首組、尾組壓載水艙注水,使水下航行器潛至半潛狀態,然后向中組壓載水艙注水,使其潛至潛望狀態,然后操潛浮舵,使其潛至指令深度。水下航行器正常上浮過程與之相反,先通過操舵上浮至潛望深度,再吹除壓載水,使其浮至水面。在應急情況下,可在某深度直接吹除壓載水,使其產生較大正浮力,迅速上浮至水面。
在水下航行器潛浮機動中,在一定航速下輔之以一定的縱傾角,可以迅速潛浮至指令深度。為了保證航行器上設備或人員的正常工作,其潛浮過程中有一定的縱傾限制,在接近指令深度時,使縱傾逐漸減小至0。縱傾控制主要通過平衡調節水艙和尾舵。平衡調節水艙主要用于調節水下航行器靜平衡,當水下航行器具有一定航速后,主要以尾舵控制縱傾。
2.2 水下航行器垂直面運動模型
式(3)中共有4個方程,第三、四方程形式較為簡單,難點是對第一、二方程的求解。將其寫為簡捷形式
式(5)為首舵或尾舵的響應模型。其舵角及轉舵速度的限制條件為:首舵25°,首舵轉舵速度3°/s;尾舵30°,尾舵轉舵速度3°/s。
2.3 分級變論域深度縱傾模糊PID控制器設計
本文主要研究水下航行器在潛望深度與工作深度之間,通過操舵進行深度控制,因此,其深度誤差eζ范圍為[–240, 240] m。水下航行器水下深度機動,要操尾舵產生縱傾,在一定航速下潛浮,為防止出現過大超調,當實際深度與目標深度差20 m左右時,逐漸減小縱傾角至0°。在產生縱傾時為保證設備或人員的正常工作,一般縱傾角限制為|θ|≤10°。這樣在深度誤差eζ、深度誤差變化率ecζ、縱傾誤差eθ及縱傾誤差變化率ecθ中,只有eζ的變化范圍較大,需要進行分級變論域設計。設計論域為Uζ1=[–240, 240] m,Uζ2=[–180, 180] m,Uζ3=[–120, 120] m,Uζ4=[–60,60] m,Uζ5=[–30, 30] m,即伸縮因子為 α1=0.75,α2=0.5,α3=0.25,α4=0.125。深度論域等級的劃分,是考慮水下航行器垂直面機動時經常使用的深度值來設計的。航行器水下機動,一般從壓載水艙注滿水以后開始,此時其深度約為10 m,而其經常活動的最大深度為250 m,對于250~300 m的極限深度只能在人為控制下有限次的達到。因此自動控制器設計中將深度誤差最大范圍定為 Uζ1=[–240, 240] m;Uζ2,Uζ3及Uζ4根據不同深度機動范圍設計,控制器根據深度誤差選擇論域范圍進行運算;控制過程中,深度誤差將逐漸變小,最終進入Uζ5=[–30, 30] m的論域內,較小的論域范圍可以減小其穩態誤差,提高其靈敏度。同樣采用逆向方法將eζ在進入控制器前先除以伸縮因子。控制器的原理結構如圖2所示。
劃分深度誤差eζ的模糊集如圖3所示,其他變量深度誤差變化率ecζ、縱傾誤差eθ及縱傾誤差變化率ecθ模糊集的劃分與之類似。PID三個參數比例系數kp、積分時間常數ki和微分時間常數kd的調整規則見表 3~表 5。
3 仿真試驗及分析
在計算機上進行仿真試驗,驗證分級變論域模糊PID控制器的深度縱傾控制效果,同時與經典PID控制的效果進行對比。針對某型水下航行器初始條件設定為:初始航速u=6 kn;初始深度ζ0=10 m;初始縱傾 θ=0°。
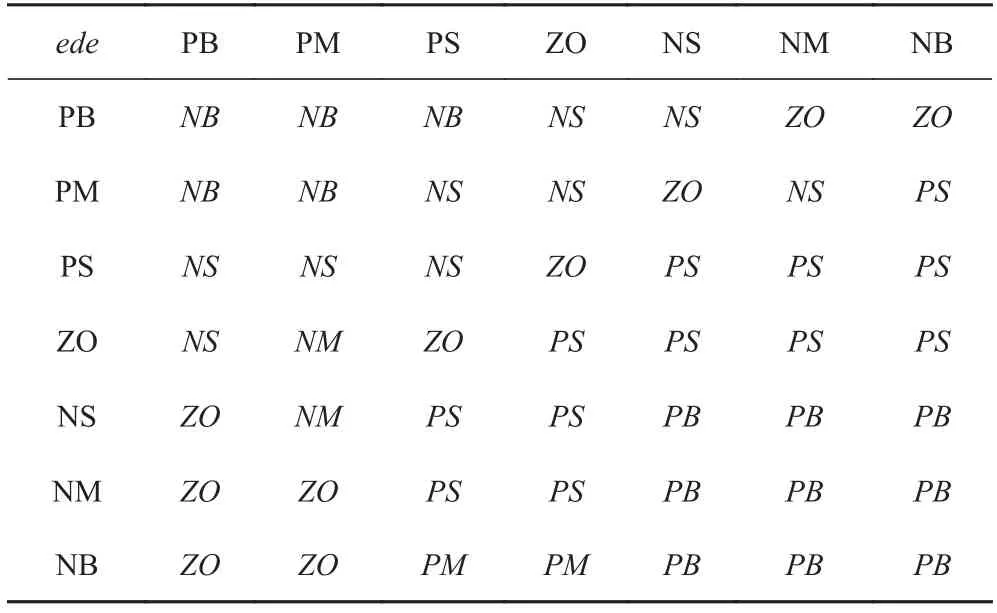
表3 kp調整規則Tab. 3 Adjust rules of kp

表4 ki調整規則Tab. 4 Adjust rules of ki

表5 kd調整規則Tab. 5 Adjust rules of kd
試驗1中,目標深度為90 m,縱傾限制為–10°,結果如圖4和圖5所示。
從結果中可以發現在深度及縱傾控制中,與經典PID控制相比,模糊PID控制具有上升速度快,超調量小,過渡時間短等優點。
試驗2改變設定條件以考察模糊PID控制的魯棒性,其中初始深度ζ0=60 m;目標深度為20 m,控制器參數與試驗1保持一致,結果如圖6所示。可以發現模糊PID控制保持了試驗1中的各項優點。
試驗3考察模糊PID控制跟蹤時變信號的能力,初始條件設置同于試驗1,目標深度以90 m與10 m交替給出,結果如圖7所示。可以發現,模糊PID控制能夠較好地跟蹤時變深度信號。
4 結 語
在深入研究模糊控制的數學基礎上,分析了模糊控制中存在的控制盲區等問題,為消除控制盲區,分析了模糊控制與PID控制結合的方案。研究了現有的變論域模糊控制思想,并針對其運算量大、推理規則利用率低等缺點,提出了分級變論域的方法。對于某型水下航行器水平面及垂直面的一般正常機動,采用分級變論域的方法,分別設計相應的模糊PID控制器,并利用計算機進行仿真試驗。結果表明,相較于傳統PID控制,在水下航行器深度及縱傾控制中,模糊PID控制器具有速度快、超調小、穩定時間短以及魯棒性好等特點,對于復雜非線性對象的控制器設計有著較好的借鑒意義。
[ 1 ]熊瑛. 基于智能控制的水下航行器操縱運動仿真研究[D]. 武漢: 中國艦船研究院, 2011.
[ 2 ]李平. 非線性系統自適應模糊控制方法研究[D]. 沈陽: 東北大學, 2010.
[ 3 ]龍祖強. 變論域模糊控制器的若干重要問題研究[D]. 長沙:中南大學, 2011.
[ 4 ]石辛民, 郝整清. 模糊控制及其MATLAB仿真[M]. 北京: 清華大學出版社, 北京交通大學出版社, 2008: 10–51.
[ 5 ]王先洲. 船舶及水下航行器操縱中的魯棒控制研究[D]. 武漢: 華中科技大學, 2008.
[ 6 ]SHUN H T, TZUU H S L. Robust fuzzy control of a class of fuzzy bilinear systems with time-delay[J]. Chaos Solitons and Fractals, 2009, 39: 2028–2040.
[ 7 ]CHEN C S. Dynamic structure adaptive neural fuzzy control for M IMO uncertain nonlinear system s[J]. Information Sciences, 2009, 179: 2676–2688.
[ 8 ]施生達. 水下航行器操縱性[M]. 北京: 國防工業出版社,1995: 45–50.
[ 9 ]任洪亮, 邊信黔. 基于模糊規則的多模型控制方法在AUV航向控制中的應用[J]. 自動化技術與應用, 2004, 23(6):1–4.REN Hong-liang, BIAN Xin-qian. Fuzzy rule-based mulitmodel control strategy and its application in AUV YAM control[J]. Techniques of Automation and Applications, 2004,23(6): 1–4.
[10]程啟明. Fuzzy控制和PID控制集成的船舶操縱控制器研究[J]. 上海電力學院學報, 2001, 17(4): 7–12.CHENG Qi-m ing. Integrated controllors of Fuzzy control and PID control for ship manoeuvring[J]. Journal of Shanghai University of Electric Power, 2001, 17(4): 7–12.
Research on motion control and simulation of underwater vehicle based on fuzzy theory
HU Jin-hui, HU Da-bin, XIAO Jian-bo
(Naval University of Engineering, Wuhan 430033, China)
In order to eliminate the control blind zone in the traditional fuzzy control, the combining of fuzzy control and PID control is adopted. Aiming at the characteristic of large amount of computation and low utilization ratio of reasoning rules for the existing variable universe fuzzy control, the method of hierarchical variable domain is proposed. The fuzzy PID controller for some type of Under Water (UV) is designed. And the simulation experiments are carried out. The results show that fuzzy PID controller has the advantages of fast speed, small overshoot and short settling time by comparing with the traditional PID control in the depth and vertical tilt control of UV. This is a good reference for the controller design of complex nonlinear object.
underwater vehicle;control;fuzzy theory
U661.33
A
1672–7649(2017)12–0059–05
10.3404/j.issn.1672–7649.2017.12.013
2016–09–20;
2016–10–21
胡錦暉(1980–),男,博士,講師,研究方向為艦船設備自動化與仿真技術。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34