V2X系統應用中多場景融合及預警優先級淺析
2017-12-28 09:25:29曹增良陳效華CaoZengliangChenXinChenXiaohua
北京汽車 2017年6期
關鍵詞:功能
曹增良,陳 新,陳效華 Cao Zengliang,Chen Xin,Chen Xiaohua
?
V2X系統應用中多場景融合及預警優先級淺析
曹增良,陳 新,陳效華 Cao Zengliang,Chen Xin,Chen Xiaohua
(北汽集團新技術研究院,北京 101300)
在V2X(Vehicle to X,車對外界的信息交換)系統應用中,存在多種不同的具體功能場景,如前向碰撞預警、緊急剎車預警、車輛變道預警等。在具體車輛行駛過程,多場景同時觸發的情況肯定存在。主要討論在此種情況下,在保證車輛和公共安全的前提下,考慮如何確定多場景觸發情況下的優先級分類,同時優化多場景同時觸發下的優先級報警問題。
V2X;多場景融合;優先級分類;車輛分類;目標分類
0 引 言
V2X(Vehicle to X,車對外界的信息交換)是未來智能交通運輸系統的關鍵技術,使得車與車、車與基站、基站與基站之間能夠通信,從而獲得實時路況、道路信息、行人信息等一系列交通信息,提高駕駛安全性、減少擁堵、提高交通效率、提供車載娛樂信息等。
吳建軍:一系列針對性舉措密集出臺,最主要的信號是國家將大力支持民營企業發展,消除各種顯性和隱性壁壘,切實解決民營企業在發展中遇到的難題,為其提供良好的法制環境和營商環境,依法保護民營企業的權益,鼓勵、支持、引導民營企業繼續發展壯大,充分發揮民營企業的活力和創造力,提升企業和市場的信心。目前,中國經濟面臨眾多的困難和挑戰,例如消費需求不足、投資增速下滑、出口受阻、金融不能為實體經濟提供有效支持等等。成本與資金壓力較大、債務問題不斷增加、對未來發展的信心不足阻礙了民營經濟進一步發展。以上困難與挑戰,既有周期性因素,也有結構性因素,還與體制改革不到位及企業自身能力不足有關。
討論V2X范圍中的V2V(Vehicle to Vehicle)所包含的各種應用場景[1]。在應用中,車輛間通過周期性的廣播BSM(Basic Safety Message)消息,將本車的位置(經、緯度信息)、高度、速度、加速度等信息發送至周邊車輛,同時接收周邊車輛發來的同樣信息,經過計算處理上述2組數據,可以判斷分析出周邊車輛相對本車的距離和位置。根據周邊車輛的相對位置,結合實際車輛行駛的工況,以保證車輛和公共安全為出發點,衍生出各種不同的功能場景,如緊急剎車預警、十字路口不明狀態預警、車輛變道預警等。
實際的車輛行駛工況有較高的實時性且環境十分復雜。上述功能場景的劃分是從理論上將實際行駛工況進行分割劃分,但在V2X具體實際應用中必須將各種功能場景再進行融合,并且對不同的功能場景的危害等級和預警的先后順序進行排序,即在同一時刻觸發2種以上不同功能場景時,預警信息不能同時顯示,只能單一分先后進行預警。
1 車輛位置分類
根據實際周邊車輛相對于本車的位置,按照遠近和方位大致可分為13種相對位置,如圖1所示,即正前、正遠前、前左、前右、前遠右、前遠左;正右、正左;正后、后左、后右、后遠左,后遠右。V2X系統的具體功能場景應用即是在分辨出兩車的上述相對位置后再經過計算距離和時間,最終產生預警。
2 功能場景的定義和分類
同時,V2X系統的功能場景還衍生出非緊急情況下的各種應用,如異常車輛提醒、道路危險狀況提醒、限速預警、闖紅燈預警、弱勢交通參與者碰撞預警、綠波車速引導、前方擁堵提醒、緊急車輛提醒等,此類應用預警為提高公共交通安全和公共交通效率有很多幫助。
國外對發生交通事故的原因進行統計分析,從事故發生的頻率、損失成本等因素綜合考量,發生事故的工況環境可分為前車停止、前車控制力缺失、車輛在無信號燈時拐彎、前車減速、車輛變道等。分析以上幾種工況可以總結出具體的應用場景和預警,例如EEBL(Electronic Emergency Brake Light,緊急電子剎車燈)、FCW(Forward Collision Warning,前向碰撞預警)、BSW(Blind Spot Warning,盲區預警)、LCW(Lane Change Warning,車輛變道預警)、DNPW(Do Not Pass Warning,逆向超車預警)、IMA(Intersection Motion Assistant,十字路口移動輔助)、CLW(Control Lost Warning,車輛失控預警)等。
3 功能場景在車輛位置中的分類
我國《國家安全法》第52條規定:“國家安全機關、公安機關、有關軍事機關根據職責分工,依法搜集涉及國家安全的情報信息。”特別在第四章第二節“情報信息”第51條~第54條中,分別規定了“情報工作制度”“各部門搜集上報情報信息職責”“情報信息工作運用現代科技手段和加強研判分析”“情報信息的報送要求”等內容。“該法的立法模式呈現‘原始型’(即分散式立法)向‘混合型Ⅰ’(即分散式+專門式立法)再向‘混合型Ⅱ’(即分散式+專門式+綜合式立法)發展的趨勢”。《國家安全法》是我國國家安全領域的基礎性法律,也是統籌、引領國家安全領域立法工作的綜合性法律之一,該法涵蓋了國家安全多個領域。
其他交通輔助類和交通效率類的場景,如道路危險狀況提示,限速預警,闖紅燈預警等與本車發生位置不確定,未在分析中。
式中:Ton為EVA中比較寄存器 CMPR1、CMPR2、CMPR3的值;T1為2倍通用定時器周期寄存器T1PR的值;ωt為采樣時刻,ωt=2 kπ/N(k=0,1,2,…,N-1),代入式(5)得到:
4 多場景融合條件下的預警順序
在安全類預警中再細分多場景融合條件下的優先級先后順序,需要考慮各場景發生所涉車輛間的最小碰撞時間和相對位置關系等因素。最小碰撞時間是首要考慮因素,在這一前提下再考慮所涉車輛的相對位置關系。結合圖2中各功能場景在相對車輛位置的分類,總結安全類預警優先級如圖4所示。
結合圖1中的車輛相對位置劃分,將V2X系統具體功能場景進行分類填充,如圖2所示,FCW和EEBL場景產生于本車正前方,且EEBL有可能是遠前方位置,因為中間可能會間隔其他車輛;而BSW和LCW兩個場景產生于本車側后方的兩側,且兩個場景可能是融合運用,即如果沒有轉向信號,場景為盲點檢測預警,如果有轉向信號,場景為盲點檢測預警和車輛變道預警同時觸發;DNPW和IMA 兩個場景可能產生于本車側前方的兩側。
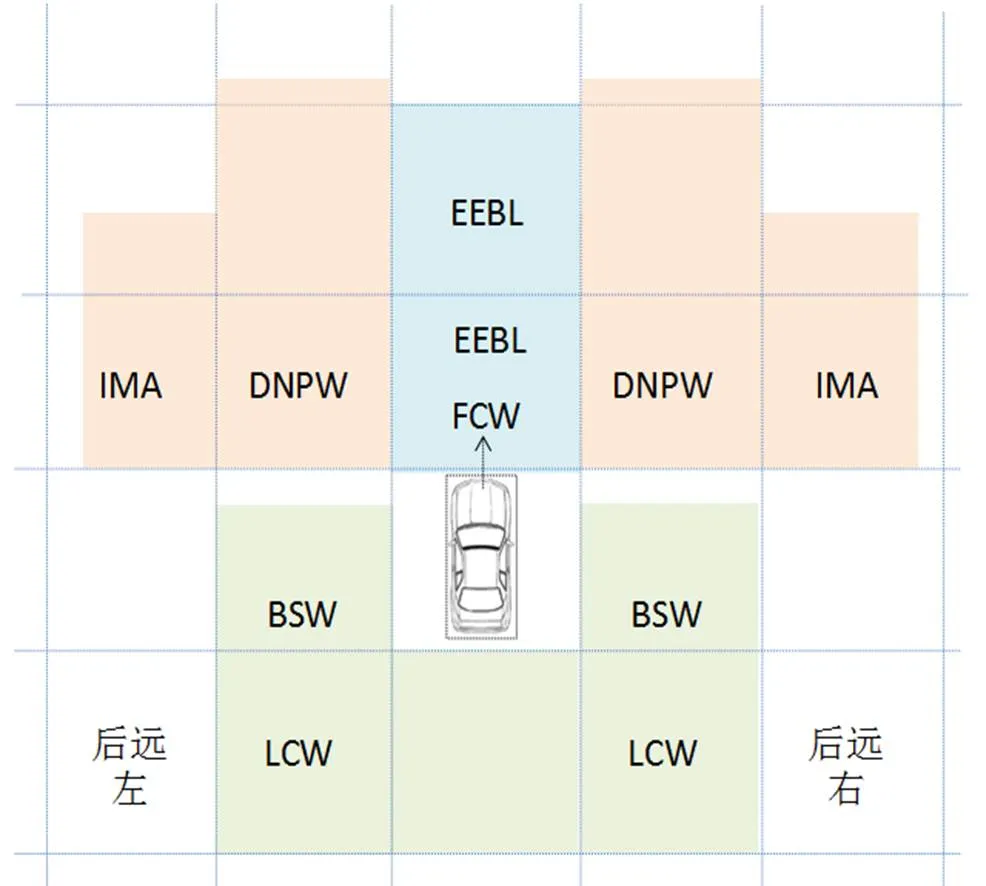
圖2 功能場景相對位置分布
注:V2P(Vehicle to Pedestrians,車載單元與行人設備通信)。
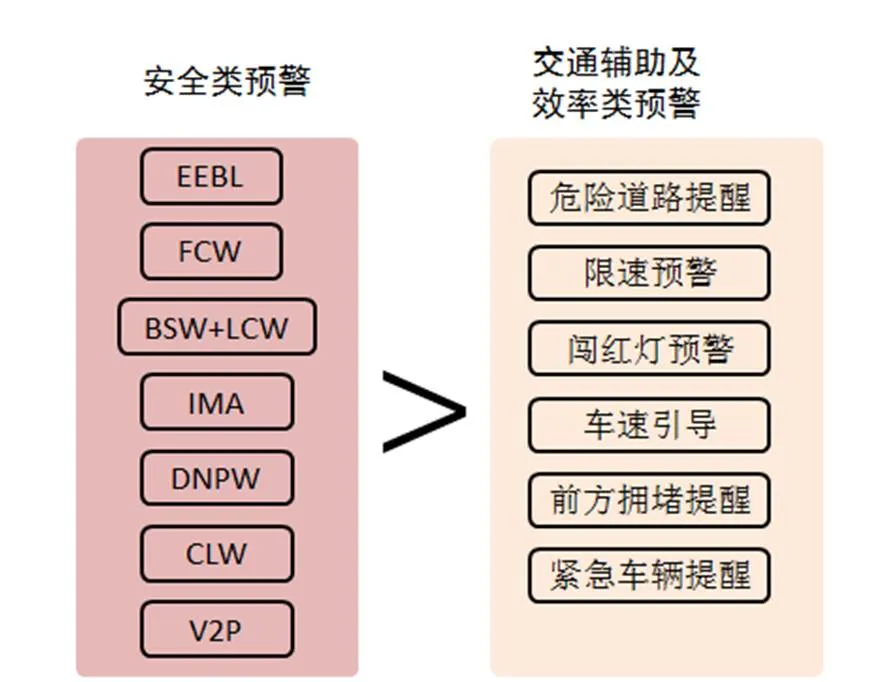
綜合考慮所有功能場景的工況,結合實際發生危害的嚴重程度,將所有功能場景預警分為2類,即安全類預警和交通輔助及效率類預警。基于車輛安全和公共交通的基礎前提,可以肯定安全類預警的優先級大于交通輔助及效率類預警,如圖3所示。
1)基于授課過程進行評價。在教學過程中,學生可在每次課后對課堂教學進行評價,授課教師在課后可以看到學生的評價結果,以判斷學生對自己本次授課的滿意程度,從而主動發現問題并加以總結改進。在一個學期內,經過一段時間的授課或者課程全部結束之后,教師已獲得學生多次評價,從評價結果曲線可以判斷學生對自己一段時間內授課內容的接受程度,也可以看出學生對授課內容中不太滿意的章節,便于后續的復習總結中有所側重。同時,學生在每次課后評價中也可以以文字形式更加具體直接地向教師反饋意見,便于教師在后續課程中改進。

圖4 安全類預警優先級判定
圖4中的每個模塊,在每個場景同時觸發的前提下,即最小碰撞時間相同,以保證人身安全為首要要求。EEBL和BSW相比,前車EEBL更為緊要,所以預警優先級排序為:V2P>FCW>EEBL>BSW+LCW>DNPW>IMA。
在交通輔助及效率類功能場景預警中,同樣以保證車輛安全和公共安全為前提條件,以此可以判定預警優先級的順序,如圖5所示。
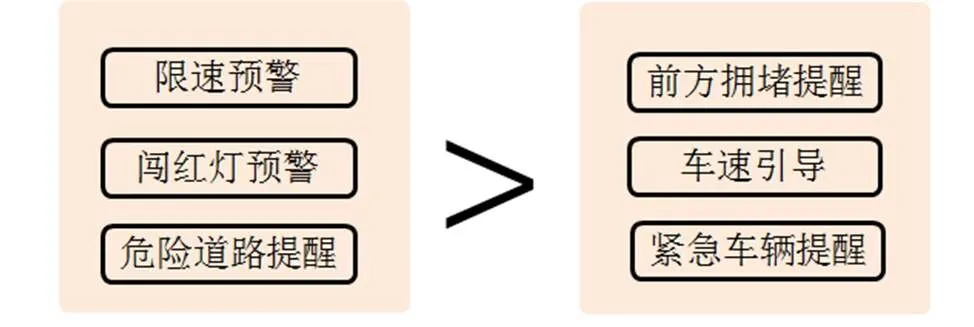
圖5 交通輔助及效率類優先級判定
在限速預警、闖紅燈預警和危險道路提醒3個場景中,闖紅燈預警的優先級最高,危險道路提醒和限速預警分別次之。在前方擁堵提醒、車速引導和緊急車輛提醒3個預警中,前方擁堵提醒優先級最為靠后,車速引導相對靠前。因此整體優先級順序為:闖紅燈預警>危險道路提醒>限速預警>車速引導>緊急車輛提醒>前方擁堵提醒。
5 總 結
討論V2X系統應用中多場景融合條件下各種不同預警的優先級排序問題。在保證最基本的車輛和公共安全的前提下,首先考慮預警觸發時具體功能場景中所涉車輛間最小碰撞時間;其次考慮相關車輛的相對位置;然后綜合各種工況因素,在非緊急情況下,可能同時產生2種以上的預警。
[1]合作式智能運輸系統車用通信系統應用層及應用數據交互標準:中國汽車工程協會T/CSAE 53-2017[S].
2017-08-22
1002-4581(2017)06-0030-03
U46:TP18
A
10.14175/j.issn.1002-4581.2017.06.009
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55