共軛凸輪引緯機(jī)構(gòu)的凸輪輪廓線光順與反求
2017-12-26 02:14:35蘇宗帥季祖鵬顧萍萍浙江理工大學(xué)機(jī)械與自動控制學(xué)院浙江杭州310018
紡織學(xué)報 2017年12期
張 雷, 蘇宗帥, 季祖鵬, 顧萍萍(浙江理工大學(xué) 機(jī)械與自動控制學(xué)院, 浙江 杭州 310018)
共軛凸輪引緯機(jī)構(gòu)的凸輪輪廓線光順與反求
張 雷, 蘇宗帥, 季祖鵬, 顧萍萍
(浙江理工大學(xué) 機(jī)械與自動控制學(xué)院, 浙江 杭州 310018)
針對凸輪加工時依靠的測量數(shù)據(jù)存在誤差及凸輪磨損后輪廓曲線損壞變形的情況,提出一種利用共軛凸輪主凸輪的有限測量點(diǎn)對其進(jìn)行光順處理和反求副凸輪的方法,并通過MatLab開發(fā)了共軛凸輪的光順和反求軟件。利用二階連續(xù)可導(dǎo)的三次樣條函數(shù)對測量的型值點(diǎn)擬合,得到具有一定曲率要求的凸輪廓線。通過共軛幾何關(guān)系,進(jìn)一步求解副凸輪輪廓線。借助UG智能點(diǎn)跟蹤及運(yùn)動仿真得到凸輪從動件的運(yùn)動規(guī)律。為改善從動件運(yùn)動規(guī)律,應(yīng)用修正梯形加速度規(guī)律對從動件運(yùn)動進(jìn)行設(shè)計,用反轉(zhuǎn)法和包絡(luò)公式得到共軛凸輪輪廓。經(jīng)驗證,反求凸輪可滿足引緯要求,為引緯機(jī)構(gòu)凸輪設(shè)計提供參考。
引緯機(jī)構(gòu); 共軛凸輪; 光順處理; 反求; 凸輪廓線
實際生產(chǎn)中,凸輪加工所需參數(shù)有時來源于對原始凸輪測量得到的型值點(diǎn),測量產(chǎn)生的誤差很可能導(dǎo)致機(jī)構(gòu)的性能不能完全實現(xiàn)。凸輪在運(yùn)轉(zhuǎn)過程中的摩擦也會造成凸輪磨損,從而導(dǎo)致凸輪輪廓曲線損壞變形,尤其在高速凸輪機(jī)構(gòu)中,凸輪輪廓的變化對機(jī)構(gòu)特性影響比較敏感,造成加速度和輸入力矩的增大。劍桿織機(jī)引緯和打緯共軛凸輪機(jī)構(gòu)的優(yōu)化以及改進(jìn)設(shè)計直接影響劍桿織機(jī)性能,因此研究織機(jī)打緯和引緯機(jī)構(gòu)對織機(jī)高速化具有重要意義[1]。
凸輪磨損修復(fù)常通過2種方法進(jìn)行:光順處理和凸輪反求。國內(nèi)外很多學(xué)者對凸輪輪廓的光順處理進(jìn)行了研究,以減小測量誤差及修復(fù)磨損后的凸輪輪廓。Angeles[2]提出采用樣條函數(shù)設(shè)計凸輪輪廓。常用的加速度運(yùn)動規(guī)律有純?nèi)呛瘮?shù)分段組合、三角函數(shù)與直線組合、修正梯形加速度、修正正弦加速度組合等。文獻(xiàn)[3]結(jié)合從動件規(guī)律,用偏離建立最小凸輪基準(zhǔn)極徑與曲率半徑映射關(guān)系。唐浩等[4]在三次參數(shù)樣條曲線擬合基礎(chǔ)上采用了隔點(diǎn)插值的方式對凸輪升程線進(jìn)行擬合,提高了凸輪精度,但不能保證擬合曲線經(jīng)過所有型值點(diǎn)。光順處理方法[5]主要有線性擬合、圓弧擬合、最小二乘多項式擬合以及三次樣條擬合等。線性擬合和圓弧擬合較為簡單,但不能保證型值點(diǎn)處一階二階導(dǎo)數(shù)連續(xù)。最小二乘多項式擬合曲線整體光滑,但難以確定合適的擬合次數(shù),擬合次數(shù)較高則會出現(xiàn)龍格現(xiàn)象[6]。三次樣條插值可以保證曲線一階二階導(dǎo)數(shù)連續(xù),避免較大沖擊載荷和龍格現(xiàn)象的出現(xiàn)。
凸輪反求一般利用反轉(zhuǎn)法和包絡(luò)線公式求解凸輪的實際輪廓線。林萬煥等[7]利用Hermite多項式設(shè)計了打緯運(yùn)動學(xué)方程,作為反求打緯共軛凸輪的已知量,但在行程最遠(yuǎn)端未考慮加速度為零。本文針對引緯機(jī)構(gòu)共軛凸輪測繪型值點(diǎn),通過三次Hermite插值,初步光順,并針對引緯機(jī)構(gòu)的劍桿交接處運(yùn)動特性,提出了基于修正梯形加速度規(guī)律二次反求的算法對凸輪線輪廓反求。
1 凸輪光順
1.1 型值點(diǎn)獲取
建立如圖1所示坐標(biāo)系,以凸輪軸心為坐標(biāo)原點(diǎn)O,選取測量得到的最小極徑為x軸正方向,方向水平向右,(βi,ri)為主凸輪廓線型值點(diǎn)坐標(biāo),用三坐標(biāo)測量機(jī)得到,β為型值點(diǎn)A的極角坐標(biāo),r為極徑坐標(biāo),R為點(diǎn)A對應(yīng)的理論輪廓線上的點(diǎn)A′到凸輪軸心的距離,d為滾子半徑,γ為點(diǎn)A與點(diǎn)A′的連線與r的夾角,ζ為γ的余角,δ為R與r的夾角。
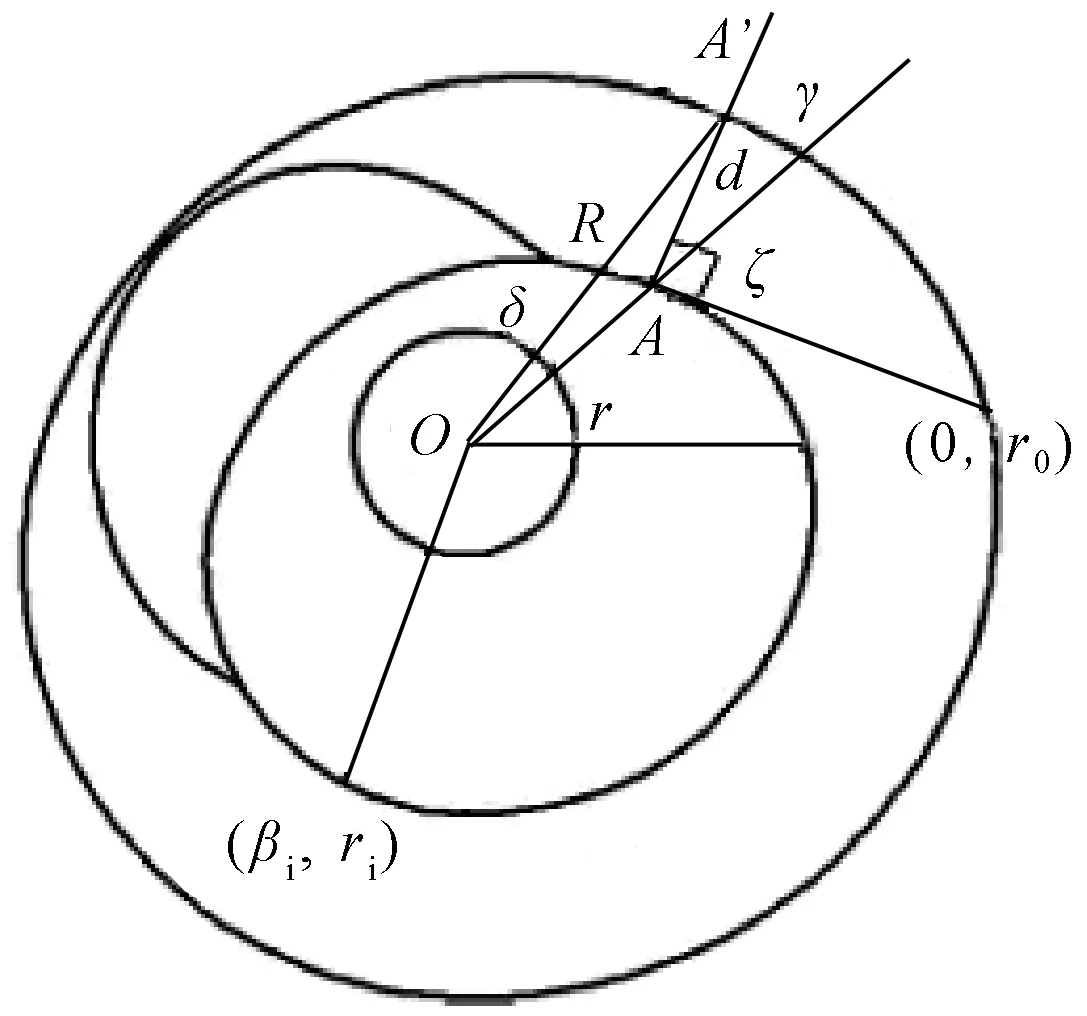
圖1 共軛凸輪示意圖Fig.1 Sketch of conjugated cams
設(shè)該輪廓線由坐標(biāo)分別為(β1,r1),…,(βi,ri),…,(βn,rn)的n個測量點(diǎn)圍成,有(β0,r0)=(βn,rn)
1.2 三次樣條函數(shù)的構(gòu)造
對上述型值點(diǎn)分段擬合,擬合函數(shù)設(shè)為
(1)
令一階導(dǎo)數(shù)為r′(βi)=mi,r(βi)=ri,其分段3次Hermite差值[7]為
(2)
ai(β)=
bi(β)=
設(shè)r(β)在區(qū)間[βi,βi+1]上:



(3)
求二階導(dǎo)數(shù),由于r(β)在節(jié)點(diǎn)βi處二階連續(xù),有r″(βi+0)=r″(βi-0),即:
化簡為
λimi-1+2mi+μimi+1=gi, (i=1,2,3,…,n-1)
(4)
式中:
邊界條件為周期性條件式:
式(4)可寫成:
(5)
用追趕法求mi,再帶入式(3)求每段表達(dá)式。
1.3 凸輪光順
為直觀表現(xiàn)輪廓線光滑程度,基于MatLab[8]開發(fā)了凸輪光順軟件,讀入Excel形式的輪廓線型值點(diǎn)坐標(biāo),用上述方法求得各m值(凸輪輪廓升程/回程的一階導(dǎo))和凸輪輪廓升程/回程的二階導(dǎo)數(shù)以及模擬曲率,并可輸出凸輪的輪廓升程/回程曲線,以Excel格式保存m值、曲率以及插值后的型值點(diǎn)。
以某紡機(jī)廠舊凸輪為例,測得一組測量點(diǎn)以修復(fù)凸輪,經(jīng)過分析對比,舊凸輪在240°附近表面有嚴(yán)重磨損,測繪后再現(xiàn)的表面輪廓線二階導(dǎo)數(shù)變化突兀。基于光順函數(shù)求解凸輪輪廓數(shù)據(jù)(部分?jǐn)?shù)據(jù)見表1)保存成.lsp格式,導(dǎo)入CAD得輪廓草圖,在UG中打開,建立三維模型求其曲率梳。圖2示出光順前后的主凸輪曲率梳對比。可看出,光順后曲線變得光滑。取輸入軸轉(zhuǎn)速300 r/min,得從動件運(yùn)動規(guī)律,如圖3所示。圖3(a)、(b)分別示出光整前后的輸出軸角加速度曲線。可看出經(jīng)設(shè)計加速度最大值大約減少30%,且加速度變化率(躍度)較大,在動力學(xué)層面不利于機(jī)構(gòu)高速運(yùn)行。原因是副凸輪沒有重新共軛反求,導(dǎo)致嚙合精度不高。

表1 差值計算結(jié)果Tab.1 Calculation result for interpolation

圖2 曲率梳對比Fig.2 Comparing before (a) and after (b) smooth design curvature comb of cam

圖3 光順前后的角加速度曲線Fig.3 Comparing before (a) and after (b) smooth design of acceleration curves
2 凸輪反求設(shè)計
凸輪反求一般采用作圖法和數(shù)值計算法。本文利用反轉(zhuǎn)原理求解:設(shè)凸輪軸轉(zhuǎn)速為零,則機(jī)架相對轉(zhuǎn)速為反向的凸輪轉(zhuǎn)速,從動件輸出運(yùn)動規(guī)律為已知,機(jī)構(gòu)中構(gòu)件相對位置關(guān)系及運(yùn)動規(guī)律在任意時刻不變。由于滾子與凸輪時刻相切,通過求滾輪的運(yùn)動規(guī)律得到凸輪輪廓線。
2.1 軟件仿真反求
此方法基于UG[9]對點(diǎn)智能追蹤完成,原理如圖4所示。圖中O為凸輪軸軸心,O′是與凸輪高副連接的滾子三角架中心,該三角架連接兩個滾子,分別與主凸輪和待求解的副凸輪相切。其中,A′,B′是滾子軸心。設(shè)凸輪軸軸心固定,三腳架反轉(zhuǎn),選定與副凸輪嚙合的滾子中心B′智能跟蹤求解坐標(biāo)值,進(jìn)一步求包絡(luò)線可得到副凸輪輪廓線。
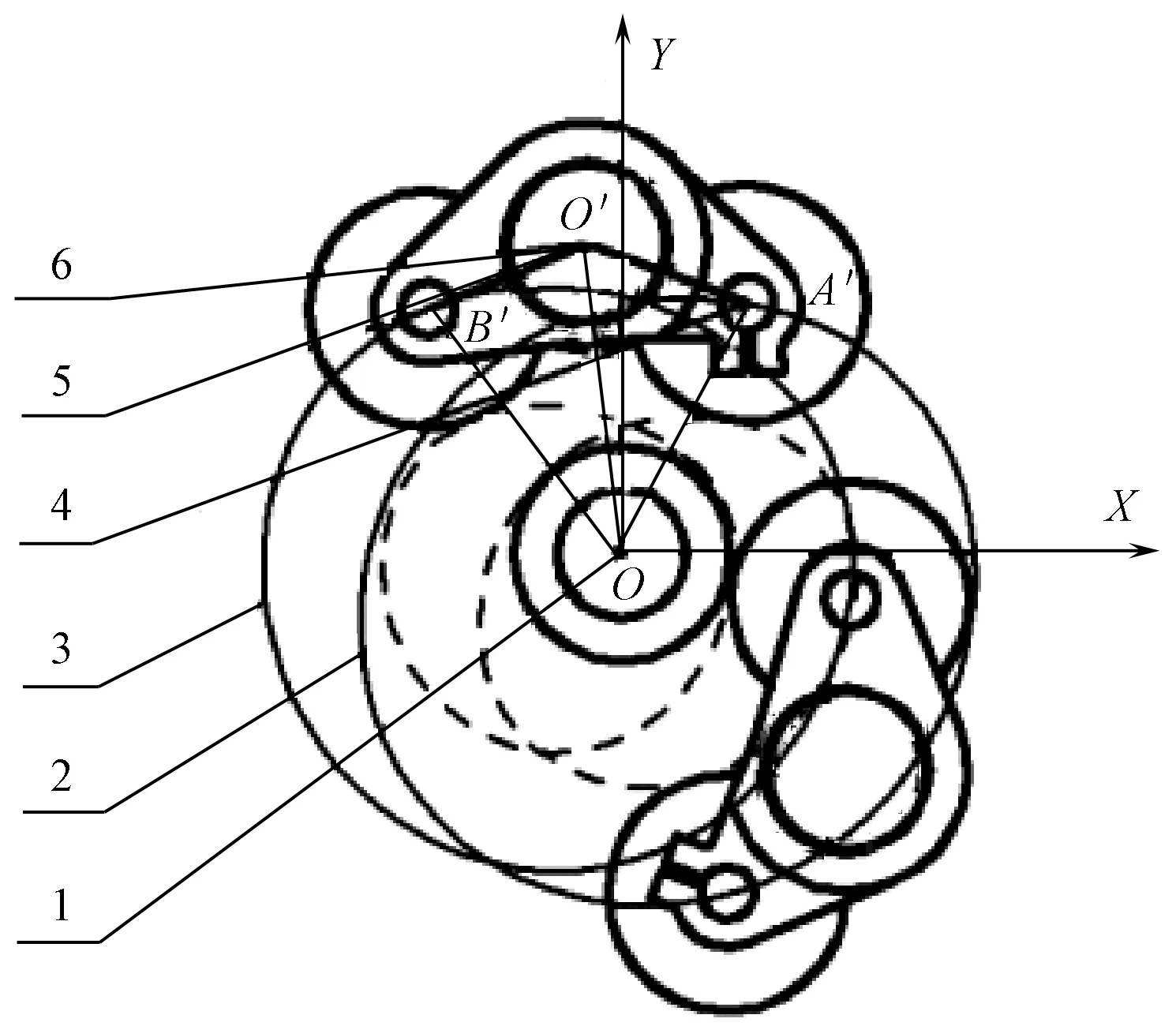
注:1—凸輪轉(zhuǎn)軸; 2—主凸輪滾子軌跡; 3—副凸輪滾子軌跡; 4—主凸輪滾子; 5—副凸輪滾子; 6—輸出軸。圖4 副凸輪反求Fig.4 Reverse design schematics of deputy cam
2.2 數(shù)值分析反求
在圖1的三角形OAA′中,滾子半徑連線與極徑夾角為
tanγ=(?r/?β)/r
(6)
(7)
sinγ=tanγcosγ
(8)
由余弦和正弦定理:

(9)

(10)
得:

(11)

(12)
滾子中心相對于凸輪的轉(zhuǎn)角:
θ=β+δ
(13)
圖4中,有O′A′=O′B′=L1,OO′=L2,OA′=R,OB′=R′,a=∠A′O′B′為已知量。
(14)

(15)

(16)
θB=θA+e+b
(17)
則得B點(diǎn)坐標(biāo)(θB,R2)。
類似求副凸輪廓線,可得副凸輪滾子半徑連線與極徑夾角:
tanφ=(?R2/?β)/R2
(18)
r2和δ根據(jù)式(8)~(11)可得:

(19)
(20)
副凸輪滾子中心相對凸輪轉(zhuǎn)角:
θ=β-δ
(21)
凸輪理論輪廓線求解完畢。
2.3 工程實例分析結(jié)果
針對所測繪的企業(yè)磨損凸輪,分別用2種辦法求解,結(jié)果如圖5所示。其中圖5(a)中黑色粗?jǐn)M合線為仿真結(jié)果。圖5(b)為反求結(jié)果及反求前輪廓線結(jié)果對比,差異之處為磨損嚴(yán)重的地方。經(jīng)對比反求結(jié)果與仿真結(jié)果基本吻合。驗證了反求的有效性。
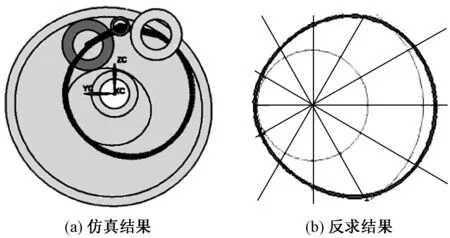
圖5 求解結(jié)果Fig.5 Result of reverse design.(a) Simulation result;(b) Reverse result
針對求取結(jié)果設(shè)計新凸輪,帶入引緯機(jī)構(gòu)考量反求效果。新引緯機(jī)構(gòu)輸出件的仿真結(jié)果如圖6所示。可看出,角加速度曲線整體規(guī)律不變,最值變化進(jìn)一步減小,曲線比原結(jié)構(gòu)明顯光滑得多。從而驗證了該方法的有效性。
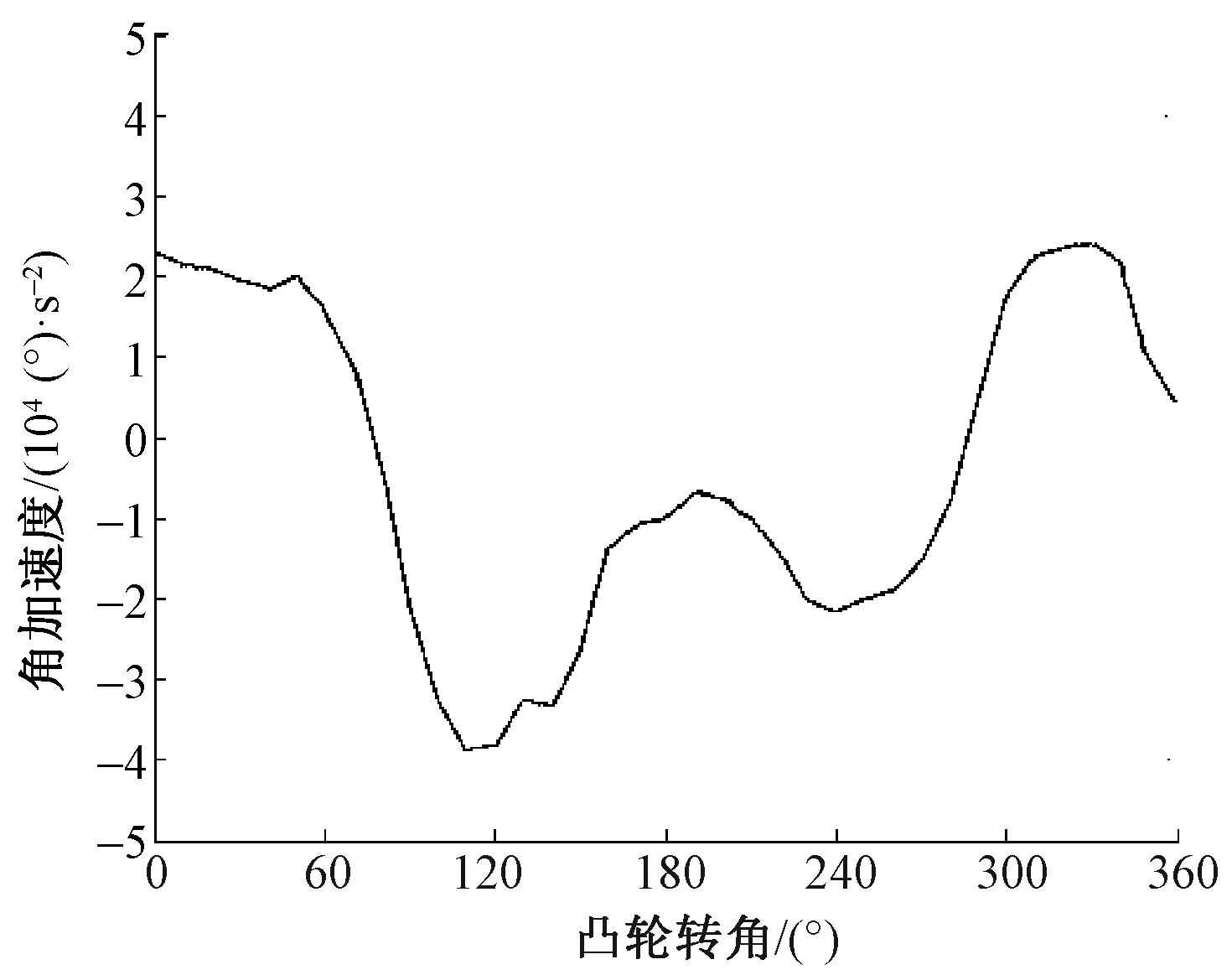
圖6 輸出件加速度曲線Fig.6 Angular acceleration curves of cam follower
3 輪廓線的二次設(shè)計
上述設(shè)計仍存在運(yùn)動特性不完善之處,如速度、加速度不能同為零,為提升動力學(xué)性能,進(jìn)一步修正加速度運(yùn)動規(guī)律。常見運(yùn)動規(guī)律有修正梯形加速度、雙簡諧、修正正余弦加速度組合等[10,11]。經(jīng)比較試驗,本文選用修正梯形對劍桿加速度進(jìn)行設(shè)計。如圖7所示。該加速度曲線為分段函數(shù),t1~t10為各節(jié)點(diǎn),T為周期,h1為正向最大值,h2為反向最大。曲線各段表達(dá)式為式(22)。連續(xù)求積分可得速度(式(23))和位移(式(24))。

圖7 修正加速度曲線Fig.7 Acceleration curve of modified trapezoidal motion
(22)
(23)
(24)

(25)
由奇函數(shù)對稱性和平移性質(zhì)容易得到:
(26)
可知:
|h2|=|h1|
(27)
令h2=-h1,則:
(28)
(29)
由式(29)求得劍桿的位移、速度、躍度與凸輪轉(zhuǎn)角之間的對應(yīng)關(guān)系。即:
(30)
從劍桿運(yùn)動反推凸輪輪廓,需要計算連接四桿機(jī)構(gòu)的幾何關(guān)系,如圖8所示。β為搖桿與機(jī)架夾角,β0為初始角,則:
β=β0+s/(R×i1×i2)
(31)
式中:R為劍輪半徑;i1、i2為齒輪機(jī)構(gòu)傳動比。搖桿與機(jī)架夾角α。

圖8 引緯機(jī)構(gòu)中的四桿機(jī)構(gòu)Fig.8 Four-bar mechanism of weft insertion
在三角形O1OA中、O1OA和O1AB中:

(32)
(33)
α=∠O1OA+∠AOB
(34)
α求解后,即可反求凸輪。圖9示出共軛凸輪機(jī)構(gòu)。

圖9 共軛凸輪機(jī)構(gòu)Fig.9 Conjugate cam mechanism
由圖9得:
ψ1,=γ-α-∠O1OO2
(35)
ψ2=ψ1-δ
(36)
滾子中心G1、G2坐標(biāo)為 (-a+Lcosψ1,Lsinψ1), (-a+Lcosψ2,Lsinψ2),根據(jù)轉(zhuǎn)角公式,可得G1、G2的坐標(biāo):
(37)
(38)
求導(dǎo):
(39)
(40)

(41)
帶入包絡(luò)方程可得凸輪實際輪廓線為:
(42)
(43)
在二次反求的凸輪驅(qū)動下得擺桿運(yùn)動特性如圖10所示。可看出角加速度曲線基本不變,保證了曲線在速度為零的交接緯線時刻加速度為零,新機(jī)構(gòu)引緯動力學(xué)性能明顯得到提升。

圖10 反求后從動件角加速度特性曲線Fig.10 Acceleration curves of follower after reverse design.
4 結(jié) 論
1)引緯機(jī)構(gòu)的凸輪磨損造成了輪廓線上的點(diǎn)的坐標(biāo)信息的不完備,基于高次樣條插值和擬合算法可以反求這些信息點(diǎn),因此這種算法在實際工程的凸輪磨損檢測與修復(fù)中具有參考價值。
2)凸輪光順很大程度上減小了輸入轉(zhuǎn)矩,是凸輪設(shè)計的必要環(huán)節(jié)。
3)由于不能保證各個型值點(diǎn)測量誤差,三次樣條插值后光順的凸輪不能保證曲線規(guī)律與磨損前一致,需要進(jìn)行運(yùn)動規(guī)律層面的二次反求。
4)利用修正梯形加速度對共軛凸輪引進(jìn)行二次反求,經(jīng)仿真驗證,可以保證劍桿劍頭在兩個極限位置時速度、加速度均為零。并且通過調(diào)整加速度規(guī)律可以獲得滿足引緯要求的共軛凸輪。
FZXB
[1] 王盛,張秋菊,李國良,等.劍桿織機(jī)打緯共軛凸輪機(jī)構(gòu)分析及優(yōu)化[J].機(jī)械研究與應(yīng)用,2009(4):107-110.
WANG Sheng, ZHANG Qiuju, LI Guoliang, et al. Analysis and optimization of rapier loom′s beating cam conjugate[J]. Mechanical Research & Application, 2009(4): 107-110.
[2] ANGELES J. Synthesis of plane curves with prescribed local geometric properties using periodic splines[J]. Computer Aided Design, 1983, 15(3):147~155.
[3] 陳俊華,湯騰躍,馬永洲,等.擺動從動件圓錐凸輪理論輪廓展開線曲率半徑研究[J].機(jī)械工程學(xué)報, 2015, 51(1):10-16.
CHEN Junhua, TANG Tengyue, MA Yongzhou, et al. Research on the radius of curvature of oscillating follower conical cam′s expansion pitch curve[J]. Journal of Mechanical Engineering,2015, 51(1):10-16.
[4] 唐浩,鄧朝暉,萬林林,等.基于交替隔點(diǎn)插值的凸輪升程擬合方法在磨削加工中的應(yīng)用[J].機(jī)械工程學(xué)報, 2012,48(23): 191-198.
TANG Hao, DENG Zhaohui, WAN Linlin, et al. Application of cam lift fitting method based on alternative-point interpolation in grinding process[J]. Journal of Mechanical Engineering, 2012, 48(23): 191-198.
[5] 董楓,陳順懷.船體曲面的一種光順重構(gòu)法[J].哈爾濱工程大學(xué)學(xué)報,2016,37(2):198-204.
DONG Feng, CHEN Shunhuai. A fair reconstruction method of hull surface[J]. Journal of Harbin Engineering University, 2016,37(2):198-204.
[6] 李慶揚(yáng),王能超,易大義.數(shù)值分析[M]. 4版.武漢:華中科技大學(xué)出版社,2006:28-31.
LI Qingyang, WANG Nengchao, YI Dayi. Numerical Analysis [M]. 4th ed. Wuhan: Huazhong University of Science & Technology Press, 2006:28-31.
[7] 林萬煥,王英,趙雄,等.基于Hermite 多項式的打緯運(yùn)動學(xué)方程及其應(yīng)用[J].紡織學(xué)報,2011,32(3):127-132.
LIN Wanhuan, WANG Ying, ZHAO Xiong, et al. Establishment and application of kinematics equations of beating-up motion based on Hermite polynomials[J]. Journal of Textile Research, 2011, 32(3): 127-132.
[8] 魏奔,孫志宏,李子軍.基于Matlab的共軛凸輪機(jī)構(gòu)設(shè)計[J]. 東華大學(xué)學(xué)報(自然科學(xué)版),2015,41(5): 663-669.
WEI Ben,SUN Zhihong,LI Zijun. The Matlab-based development of conjugate cam design[J].Journal of Donghua University(Natural Science), 2015,41(5):663-669.
[9] 呂洋波,胡仁喜,呂小波,等.UG NX 7.0動力學(xué)與有限元分析從入門到精通[M].北京:機(jī)械工業(yè)出版社,2010:96-108.
Lü Yangbo, HU Renxi, Lü Xiaobo, et al. Dynamics and Finite Element Analysis from Entry to the Master[M]. Beijing: China Machine Press, 2010:96-108.
[10] 郭宏亮,王青,葉國銘.修正梯形加速度運(yùn)動規(guī)律中過渡曲線的設(shè)計[J].紡織學(xué)報, 2007,28(8):100-101, 109.
GUO Hongliang, WANG Qing, YE Guoming. Design of transitional curve of modified trapezoid acceleration motion[J]. Journal of Textile Research, 2007,28(8):100-101,109.
[11] 錢永明.非對稱直線-余弦-直線運(yùn)動規(guī)律及其在經(jīng)編機(jī)中的應(yīng)用[J].紡織學(xué)報,2015,36(12):135-139.
QIAN Yongming. Asymmetric line-cosine-straight motion law and application in warp knitting ma-chine[J]. Journal of Textile Research, 2015, 36(12):135-139.
Smoothandreversedesignofconjugatedcamsofweftinsertion
ZHANG Lei, SU Zongshuai, JI Zupeng, GU Pingping
(CollegeofMechanicalEngineering&Automation,ZhejiangSci-TechUniversity,Hangzhou,Zhejiang310018,China)
In consideration of the errors of the measurement data in the current cam production, and cams′contour curve deformation and damage after abrasion, a novel method of smooth and reverse design of conjugated cams in the weft insertion mechanism based on the limited measurement points was presented. In addition, a smooth and reverse software of the conjugate cam was developed using MatLab. Two-order continuous differentiable three spline function was used in this software to fit the data of conjugated cams. The curvature of the new curve was continuous and changes slowly. Geometric-relations were used to obtain the contour curve of the auxiliary cam. The motion laws of cam follower were obtained by using UG intelligent point and motion simulation function. In order to improve the motion law of the follower, the modified trapezoid acceleration law was used in the conjugated cams of the weft insertion mechanism. A cam profile is obtained by using inversion method and the envelope equation. After verification, the reverse cam can satisfy the requirements of weft insertion. It also provides a reference method for the design of the conjugated cams of the weft insertion mechanism.
weft insertion mechanism; conjugated cam; smooth design; reverse design; contour curve of cam
10.13475/j.fzxb.20160401509
TS 103.1
A
2016-04-06
2017-09-19
國家自然科學(xué)基金項目(51175475);浙江省自然科學(xué)基金項目(LY14E050027,LY15E050027)
張雷(1974—),男,副教授,博士。主要研究方向為機(jī)器人和紡織機(jī)械。E-mail:lzhang@zstu.edu.cn。