一種應用于對岸火力支援的無人機目標定位技術研究?
2017-12-25 02:18:37王成飛吳鵬飛石章松
艦船電子工程 2017年11期
王成飛 吳鵬飛 石章松
(1.91655部隊 北京 100036)(2.海軍工程大學 武漢 430033)(3.92925部隊 長治 046000)
一種應用于對岸火力支援的無人機目標定位技術研究?
王成飛1吳鵬飛2,3石章松2
(1.91655部隊 北京 100036)(2.海軍工程大學 武漢 430033)(3.92925部隊 長治 046000)
根據對岸火力支援作戰需求,提出了兩種無人機作戰樣式,介紹了無人機攜帶的光電吊艙對目標定位所采用的齊次坐標轉換法,應用全球定位系統技術,獲取無人機和目標位置信息,以及無人機姿態信息,建立輔助坐標系,構建定位坐標轉換方程,對目標定位過程進行推導。基于蒙特卡羅方法對目標定位結果進行了仿真,并對影響定位結果精度的因素進行了分析,分析過程和結果具有一定的參考價值和實用性。
火力支援;坐標轉換;誤差分析;定位精度
1 引言
隨著海軍從“近海防御”到“近海防御與遠海防衛”的戰略轉變以及我國海外利益的不斷擴大,由海軍水面艦艇承擔的對岸火力支援作戰任務逐漸成為一種愈發重要的現實需求[1]。為實現對陸地和近岸海面目標的精確打擊,關鍵是獲取目標的準確位置信息。對岸火力支援作戰是火力支援的特殊形式,傳統火力支援作戰的目標位置信息獲取是以偵查人員結合地圖與觀測器材為主的作業模式,存在探測距離近、觀察時間長、信息精度低、打擊不及時等問題,這既降低了作戰的準確性與時效性,影響整個作戰意圖的實施,同時還有可能造成己方裝備和人員的誤傷,而信息技術和無人系統的發展,為火力支援作戰目標定位帶來了新的可能[2]。一種典型的作戰樣式是艦艇編隊或前沿特種分隊施放無人偵察機,無人機攜帶高精度的光電吊艙設備,探測到目標的精確位置信息,經過一系列計算后將目標位置信息通過一體化網絡發送給火力打擊艦艇編隊或者前沿特種分隊,隨后對目標進行精確火力打擊[3]。
對于海軍對岸火力支援的研究,目前文獻多集中于無人機保障、新型信息化彈藥、艦炮武器發展以及作戰效能分析等方面。在此基礎上,本文以對岸火力支援作戰為背景,探討了無人機在對岸火力支援作戰中的作戰樣式[4],分析其光電吊艙對目標定位流程,對其定位誤差進行了仿真分析,指出了影響定位精度的幾方面因素,為對岸火力支援作戰中無人機的運用提供了一些實質性參考。
2 無人機作戰樣式
在執行對岸火力支援作戰中,無人機攜帶的探測設備為模塊化光電吊艙[5],光電吊艙配置有GPS、航行姿態量測系統、光電吊艙等設備,其系統組成如圖1所示,光電吊艙把自身相對于無人機平臺的姿態角、地面/海面目標相對于無人機的激光測距值和光電吊艙的視軸位置信息等數據傳遞給無人機,飛機平臺將獲得的所有信息與GPS信息和慣導數據融合,經坐標變換后完成目標定位。
在對岸火力支援作戰中,被打擊的目標既有陸地目標也有近岸海面目標,作戰環境十分復雜,根據前沿作戰需要,無人機既可以通過艦艇編隊施放也可以通過前沿特種分隊施放,其作戰樣式主要有以下兩種:
作戰樣式一:由艦艇編隊施放無人機并控制無人機飛行,無人機在任務區執行偵察任務,探測到目標后將目標位置信息通過一體化網絡發送給艦艇編隊,艦艇編隊經過任務分配后指揮火力打擊艦艇對目標進行打擊,如圖2所示。
作戰樣式二:在前沿任務區我前沿特種分隊施放無人機并控制無人機飛行,無人機對概略目標進行精確偵察,探測到目標后將目標位置信息通過一體化網絡發送給前沿特種分隊,前沿特種分隊再發送給艦艇編隊,或無人機直接將目標位置信息發送給艦艇編隊,艦艇編隊經過任務分配后指揮火力打擊艦艇對目標進行打擊,如圖3所示。
3 定位過程
3.1 輔助坐標系
無人機利用光電吊艙對陸地/海面目標定位涉及到的坐標系有以下幾種[6~7]:
1)大地坐標系C(Oc-XcYcZc);
2)大地直角坐標系G(Og-XgYgZg);
3)無人機平臺地理坐標系S(Os-XsYsZs);
4)無人機平臺直角坐標系A(Oa-XaYaZa);
5)光電吊艙直角坐標系B(Ob-XbYbZb)。
各坐標系直角的轉換矩陣:
1)大地坐標系到大地直角坐標系的變換矩陣如下:其中:a為橢球的長半徑,b為橢球的短半徑,e為橢球的第一偏心率,e′為橢球的第二偏心率,N為卯酉圈曲率半徑,,另外,U=arctan
2)大地直角坐標系到無人機地理坐標系的變換矩陣如下[8]:
其中,αs、λs、hs是無人機大地坐標的經緯度和大地高程。
3)無人機地理坐標系到無人機平臺直角坐標系的變換矩陣如下:
其中,φas,ψas,θas是無人機姿態角(偏航、橫滾和俯仰)。
4)無人機平臺直角坐標系到光電吊艙直角坐標系的變換矩陣如下:
其中,Δθba,Δφba,Δψba是光電吊艙與無人機之間的振動角。
3.2 目標定位的坐標轉換
無人機光電吊艙目標定位過程是,已知目標相對光電吊艙的球坐標(α,λ,R)、無人機的大地坐標(αs,λs,hs)、無人機偏航角和光電吊艙振動角,求解目標大地坐標(B,L,H)的過程,其轉換過程如圖4所示。
由于本文擬采用光電測量設備,所以目標相對無人機基座的位置關系可以有兩種表示方式,如圖5所示,其一是目標在基座坐標系的坐標值(xb,yb,zb),此表示方法在齊次坐標轉換過程中較為常用。其二是目標相對基座的位置關系(方位角α,俯仰角λ,距離R),該表示方式可以通過無人機測量設備直接得到[9]。它們代表的目標位置實際上是一致的,但在定位計算過程中需要探討兩者轉換關系,以便進行理論研究。
從圖中可以看出:
定位過程是在目標相對光電載荷基座坐標系的位置(方位角α,俯仰角λ,距離R)已知的情況下,通過齊次坐標轉換法求解大地坐標系坐標值(緯度B,經度L)的過程。如圖5所示:
第一步:求出目標在基座坐標系中的坐標(xb, yb, zb):
第二步:求出從基座坐標系坐標值到大地直角坐標系的坐標值 (xg,yg,zg):
又因為所有直角坐標系間的旋轉矩陣都是正交矩陣,所有正交矩陣的逆矩陣都和它的轉置矩陣相等[10],Q1、Q2、Q4、Q5、Q6、Q7、Q8、Q9均 為正交矩陣即
第三步:根據大地直角坐標系到大地坐標系的轉換,求出 (B,L,H):
4 定位誤差分析與仿真
4.1 誤差模型
蒙特卡羅方法是隨機模擬方法,也稱統計試驗方法,是隨著計算機技術的發展而快速發展起來的一種研究方法[11]。它利用計算機產生符合要求的隨機數來代替現實難以獲取的數據,從而解決所研究的問題。
在對目標定位誤差進行分析時,根據無人機光電測量系統坐標轉換過程中各參數的量測值和兩側誤差,運用蒙特卡羅法建立誤差傳遞模型:
其中,xi為坐標轉換過程中各參數的測量值,Δxi為測量誤差。
在已知目標相對基座的位置(α,λ,R)情況下,假設目標大地坐標求解過程為[12]
其中,B、L、H為目標在大地坐標系的坐標值,ΔB、ΔL、ΔH為目標定位結果誤差,G為坐標轉換過程,X、ΔX表示坐標轉換過程中參數及其誤差。
機載光電吊艙目標定位誤差與多種因素有關,考慮三維空間情況,在光電吊艙測定目標位置(經度、緯度、高程)時直接測定的物理量包括:通過定位導航類設備測定的無人機平臺在大地坐標系下的位置(經度、緯度、高程),無人機姿態角(俯仰角、橫滾角、偏航角)、目標在光電平臺坐標系中的位置(方位角、俯仰角和距離),另外無人機光電吊艙安裝有減震器,應將光電吊艙減震器的角振動誤差也考慮進去,上述參數共同構成光電吊艙的定位精度指標系統。由實際工作中參數模型和概率論知識可知,這些參數的誤差大都服從正態分布或近似服從正態分布。因此,假設定位計算的參數誤差ΔX分布如下式所示:
4.2 仿真程序設計
基于蒙特卡羅的無人機光電吊艙對目標定位誤差模型仿真程序計算的具體步驟如下圖所示。
根據實際情況得到仿真程序所采用的數據如下表所示:
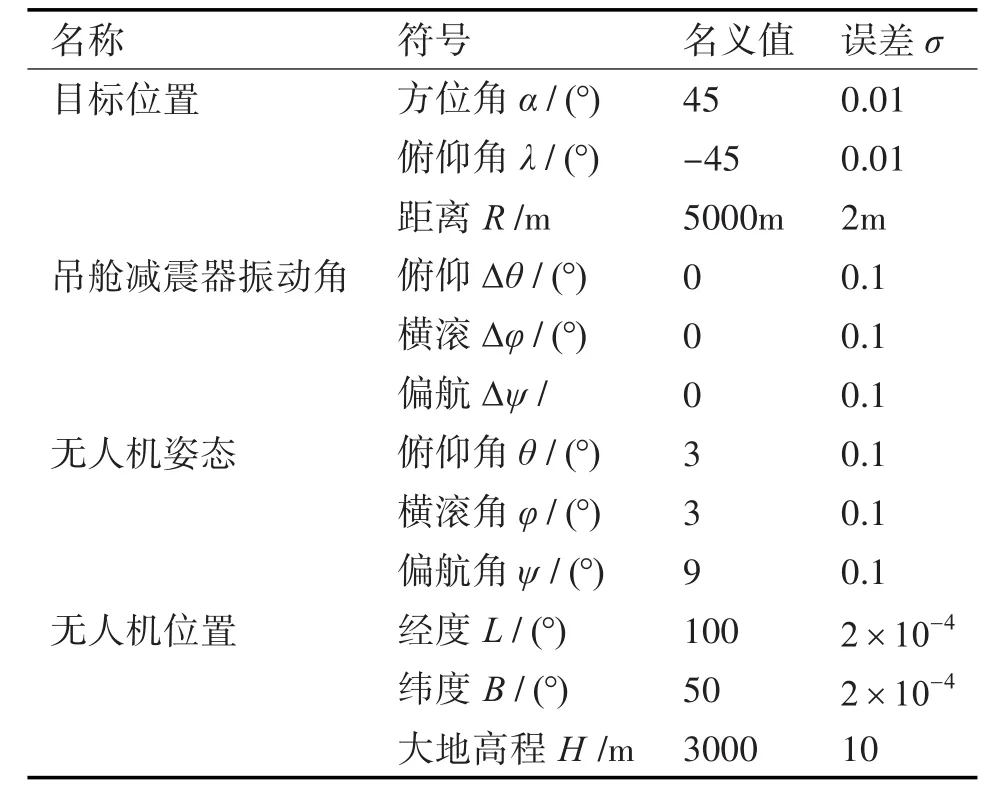
表1 仿真所用數據值
4.3 實驗結果與分析
通過Matlab仿真程序節進行1000次計算,對加入誤差的目標定位模型進行仿真,分別得到陸地和海上目標的定位誤差結果如圖7所示。
由圖7和圖8可以看出,無論海上目標還是陸地目標,無人機光電吊艙對目標的定位結果呈中心分布,中心某點概率最大,概率向外越來越小。經度、緯度和高度的誤差分布都近似服從μ=0的正態分布。定位誤差仿真結果如表2所示。
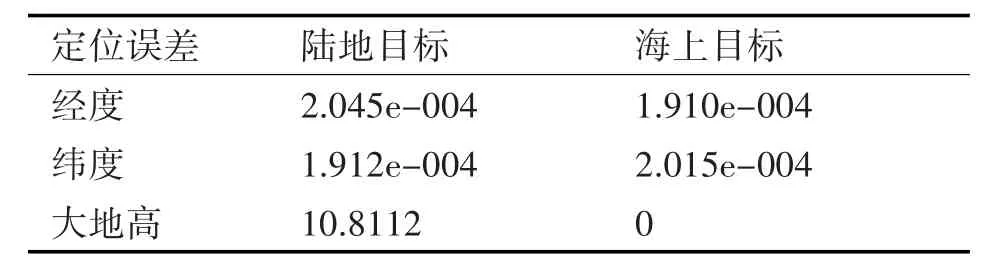
表2 陸地/海上目標定位精度
應用蒙特卡羅方法模擬誤差的隨機抽樣值,模擬出目標定位誤差的樣本值,各個樣本相互獨立,樣本數量越多,結果就與實際結果越接近,且置信度很高[13]。采用前文無人機光電吊艙目標定位方法對陸地/海上目標定位時,其精度與無人機位置、無人機姿態、光電吊艙振動角和目標位置及其誤差有關。應用蒙特卡羅方法對表1數據進行誤差分析,可以知道:1)無人機經緯度的變化對定位精度影響較小,雖然在無人機靠近南北兩極時對誤差精度影響較大,但對于對岸火力支援作戰來說沒有實際意義,故暫不考慮。無人機大地高H受到目標與無人機距離R的影響較大;2)無人機姿態角和光電吊艙振動角的名義值對定位精度沒有影響。3)目標與無人機的距離R與定位誤差近似成正比的關系。4)無人機和光電吊艙姿態及量測誤差越大,目標定位誤差越大。針對以上各參數對定位結果影響的分析,可以采取必要措施提高目標定位精度,在對岸火力支援作戰中提高無人機的作戰效率。
5 結語
隨著海軍戰略的轉變以及我國海外利益的不斷擴大,對岸火力支援作戰任務成為一種愈發重要的現實需求,無人機在其中發揮的作用也越來越大。本文根據對岸火力支援作戰需求,提出了兩種無人機作戰樣式,介紹了無人機攜帶的光電吊艙對目標定位方法,并基于蒙特卡羅方法對目標定位結果進行了仿真,對影響定位結果精度的因素進行了分析,針對分析結果,可以采取必要措施提高無人機定位精度,在對岸火力支援作戰中提高無人機的作戰效率,本文分析過程和結果具有一定的參考價值和實用性。
[1]吳中紅,石章松.對岸火力支援前沿偵察系統關鍵技術與作戰樣式[J].火炮發射與控制學報,2015,36(1):91-93.
[2]曾巍,李建軍,王宗虎.無人機保障艦炮對岸火力支援綜合效能評估研究[J].艦船電子工程,2009,29(8):6-9.
[3]李勇,付慶紅,田大新.陸軍精確化火力支援武器裝備體系及發展[J].兵工學報,2010,31(增刊2):112-116.
[4]趙偉光.信息化艦炮武器系統對岸作戰流程仿真[J].指揮控制與仿真,2012,32(4):79-81.
[5]甄云卉,路平.無人機相關技術與趨勢[J].兵工自動化,2009,28(1):14-16.
[6]周凱,段芳芳,任強.大地直角坐標系到GPS坐標系的直接轉換法研究[J].火控雷達技術,2013,42(1):38-41.
[7]華陽.電子偵察無人機單站無源定位研究[J].艦船電子對抗,2009,32(2):14-17.
[8]孫輝.機載光電平臺目標定位與誤差分析[J].中國光學,2013,06(6):913-914.
[9]林旻序,喬彥峰,戴明,等.單載荷航空吊艙目標定位方法研究[J].紅外技術,2011,33(10):593-597.
[10]吳艷梅,李剛,張霞.無人機載光學偵察系統實時目標定位器設計[J].電光與控制,2008,15(11):47-49.
[11]王晶,高利民,姚俊峰.機載測量平臺中的坐標轉換誤差分析[J].光學精密工程,2009,17(2):388-394.
[12]朱本仁.蒙特卡洛方法引論[M].濟南:山東大學出版社,2006:5-6.
[13]李英,王紹彬,葛文奇.影響光電平臺穩定精度的因素分析[J].長春理工大學學報,2009,32(1):4-7.
A Research on Target Positioning Technology by UAV for Shore Fire Support Combat
WANG Chengfei1WU Pengfei2,3SHI Zhangsong2
(1.No.91655 Troops of PLA,Beijing 100036)(2.Naval University of Engineering,Wuhan 430033)(3.No.92925 Troops of PLA,Changzhi 046000)
According to the demand of shore fire support combat,two kinds of UAV combat styles are put forward,the homo?geneous coordinate transformation method is introduced for the photovoltaic pod carried by UAV.Global positioning system technolo?gy is applied to get location information of UAV and target as well as UAV attitude information.The coordinate system and transfor?mation equation are extablished,the target position process is derived,the position results is simulated based on Monte Carlo meth?od,and the factors influenced the accuracy of position results are analyzed.The analysis process and result have certain reference value and practicality.
fire support,coordinate transformation,error analysis,position accuracy
TP249
10.3969/j.issn.1672-9730.2017.11.013
Class Number TP249
2017年5月11日,
2017年6月21日
海軍裝備預研項目(編號:3020801010105)資助。
王成飛,男,工程師,研究方向:指揮信息系統技術。吳鵬飛,男,博士研究生,研究方向:指揮控制與優化決策。石章松,男,教授,博士生導師,研究方向:指揮控制與優化決策。
