多變流器并聯系統零序電流控制方法分析*
2017-12-20 06:00:22寧丙炎鄧超然楊東海郭寶甫徐軍
電測與儀表 2017年23期
寧丙炎,鄧超然,楊東海,郭寶甫,徐軍
(1.國家電網河南省電力公司,鄭州450000;2.許繼集團有限公司,河南許昌461000)
0 引 言
隨著新能源技術的快速發展,光伏、風電等新能源的容量也在極快的增加。但是,這些新能源的出力具有很強的波動性,在實際應用時,往往配合儲能裝置來平抑波動性。三相電壓型PWM變換器由于功率因數可調、效率高、體積小、能量可雙向流動等優點,在儲能領域得到廣泛的應用[1-5]。隨著儲能系統容量的不斷增大,對儲能變流器的功率也有著更為嚴格的要求。然而,單個變流器功率的提高帶來的成本和技術難度以幾何倍數增加。因此,使用多個小功率變流器并聯組成大功率變流器成為主流的解決方案[6-10]。
這種解決方案也會帶來新的問題。共直流母線交流側直接并聯的三相變流器中會產生零序電流通路。如果模塊之間的電路參數或者控制效果不同,在并聯模塊之間就會產生較大的零序環流,從而使得并網點輸出電流發生畸變,增加變流器損耗,降低系統運行效率,嚴重時可能導致系統離網。
抑制環流最根本的方法是阻斷環流的通路,包括各變流器使用獨立的直流電源、交流側采用多繞組變壓器的方式實現電氣隔離。這些方式可以完全消除環流,但是會增大變流器的體積,提高變流器的成本。文獻[4]提出了一種基于無差拍控制的零序環流抑制方法,這種方法可以有效濾除零序環流,效果較好。文獻[5]提出了利用零序PI控制器對空間矢量脈寬調制(space vector pulse width modulation,SVPWM)中零矢量的分配進行調節,這種方法易于實現,可擴展性強。
但是上述文獻在進行仿真時,其實驗條件多為兩路變流器并聯系統,對于三個及三個以上的變流器并聯系統并沒有較多的研究。本文將實驗條件變為三個變流器并聯,從控制效果以及實現該方法的難易情況對上述幾種方法進行分析。綜合比較得到一種實用性較高的三個及三個以上變流器并聯系統的零序環流控制方法。
1 三相PWM變換器并聯系統平均值模型
本文中并聯系統為共直流母線交流側直接并聯的結構,如圖1所示。
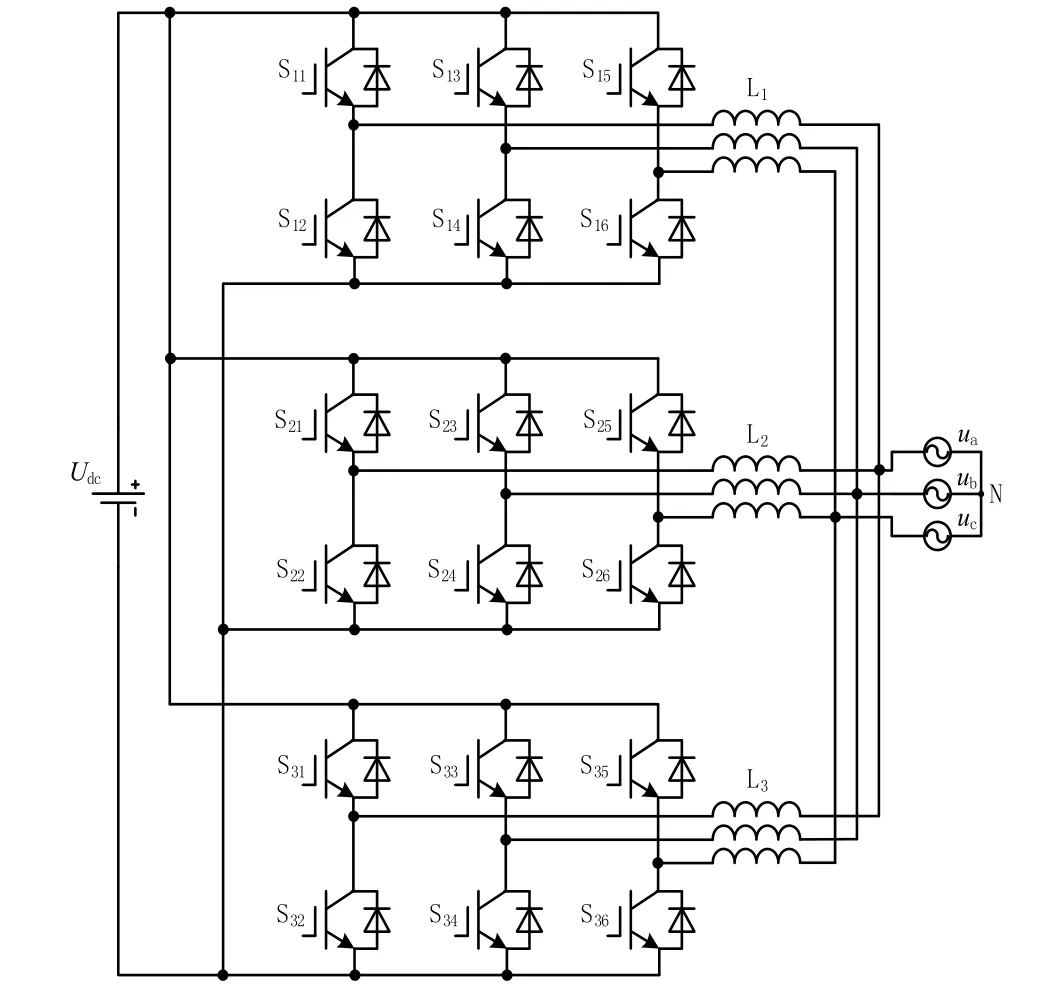
圖1 并聯三相變流器的拓撲結構Fig.1 Topology of parallel three-phase converter
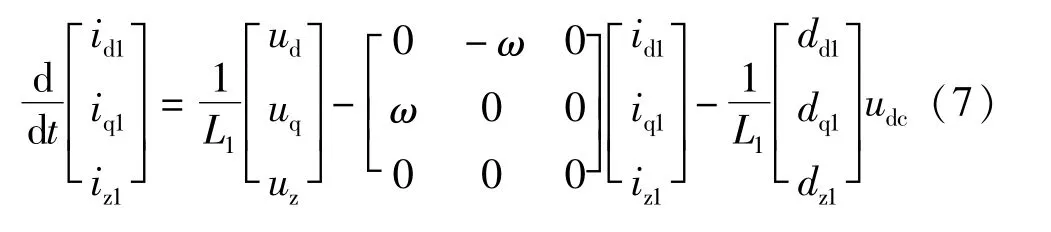
選取直流負極作為參考點,則并聯三相變流器在三相靜止坐標系下的平均模型可以表示為:
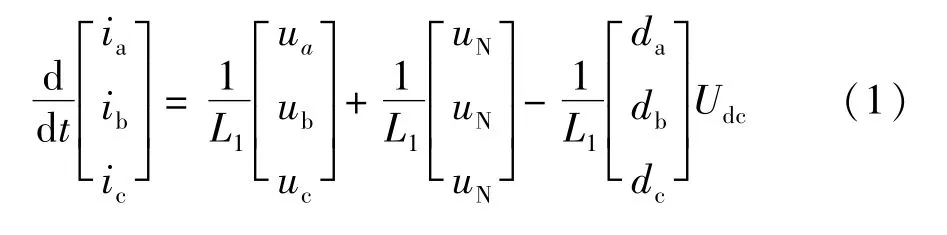
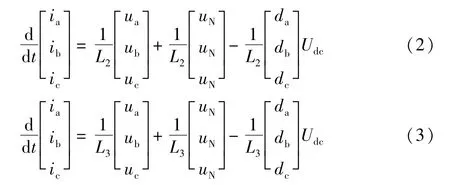
對于單個變流器而言,不存在環流通路,零序環流為0。對于兩個變流器組成的并聯系統而言,由于通路較為簡單,如果存在環流,必然是從一個變流器流入另一個變流器,變流器的零序環流之和為0。對于三個及三個以上變流器而言,零序環流的通路較多,但仍滿足所有變流器零序環流之和為0的結論。即:

式中ixz表示第x個模塊的零序電流。
由于三相變流器在三相靜止坐標系下的控制策略較為復雜,在實際應用中,往往采用坐標變換,將三相靜止坐標系變為兩相旋轉坐標系,即對在三相靜止坐標系下得到的方程采用abc/dq變換。但是,abc/dq變換是在不考慮零軸分量時的一種簡化變換,對于本文而言,需要將控制量的零軸分量納入控制變量之中。因此,本文采用的變化為補充了零軸分量變換的形式,即abc/dq0變換。該變換的坐標變換矩陣為:
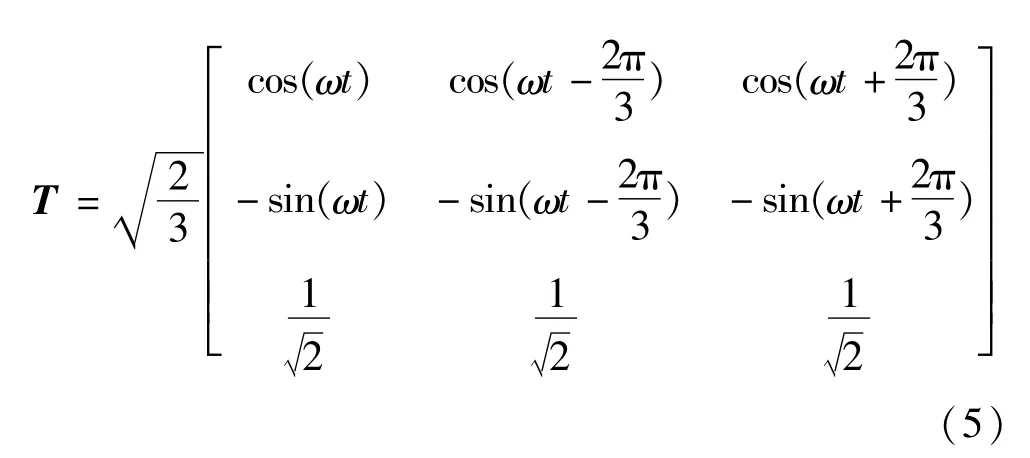
利用矩陣T就可以將三相靜止坐標系下的交流量變換為兩相同步旋轉坐標系下的直流量。從式(1)~式(3)及式(5)中,可以看出,如果對式(1)~式(3)進行變換,為了簡化分析,需要對占空比進行一些處理。本文仿照零序電流的概念,定義零序占空比,零序占空比定義如式(6)所示。

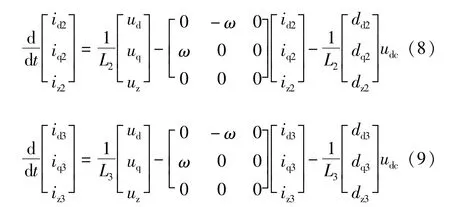
對式(1)~式(3)進行 abc/dq0變換,有:
從平均值模型中可以看出,零序環流的與并聯系統中變流器的零矢量的分配情況以及并聯變流器硬件電路(主要是濾波電路)的參數差異有關。而硬件電路的差異是難以避兔的,因此,控制變流器的零矢量分配就是控制零序環流最有效的解決方法。
2 零序環流控制方法:
2.1 零序環流的PI控制方法
PI控制方法具有適用范圍廣,調節參數較為方便等特點,在工程控制領域得到廣泛應用。
單獨考慮零軸電流的情況,將式(7)~式(9)進行簡化,可以得到:
可以看出,零序電流與零序占空比之間實際上是一個一階系統,可以用PI調節進行控制。從式(7)~式(9)來看,二者之間的關系僅僅與變流器本身的電路參數有關,組成并聯系統的其他變流器的參數沒有直接關系,控制方法較為獨立。因此,該方法可以較好的適用于無互聯線系統。
2.2 無差拍控制
考慮到三個變流器組成的并聯系統中,三個變流器的零序電流之和為0。uz為并聯系統輸出電壓經過坐標變換得到的變量,應盡可能避兔該變量的影響。因此,式(10)~式(12)可化為:

從式(13)難以進一步化簡。為了解決這一問題,本文將三個變流器并聯系統人為劃分成兩個變流器并聯組成的模塊,讓剩下的一個變流器與虛擬形成的模塊進行并聯。這樣處理可將三個變流器組成的并聯系統簡化成兩個變流器并聯系統并聯而成并聯系統。此時,由式(10)~式(11)可化簡得到式:

將微分形式轉化為離散形式,可以得到:

從零序電流控制的角度來看,應使得iz2(k+1)為0。可以得到零序占空比和現在時刻的零序電流之間較為明確的數學關系。即可以在零序電流控制上采用無差拍方法。但是,該方法必須得到兩個并聯變流器的占空比和電路的實際電感,對電路參數以及并聯變流器之間的信息交互有一定的要求,不適用于無互聯線系統。
3 仿真分析
為了驗證上述分析的正確性,本文在SIMULINK中搭建了三路并聯的仿真模型。首先分析在濾波電感均為2mH且輸出功率均為20 kW時,三個變流器組成的并聯系統的零序電流分布情況。仿真得到的結果如圖2至圖5所示,圖2和圖4每格代表50 A,圖3和圖5每格代表5 A。
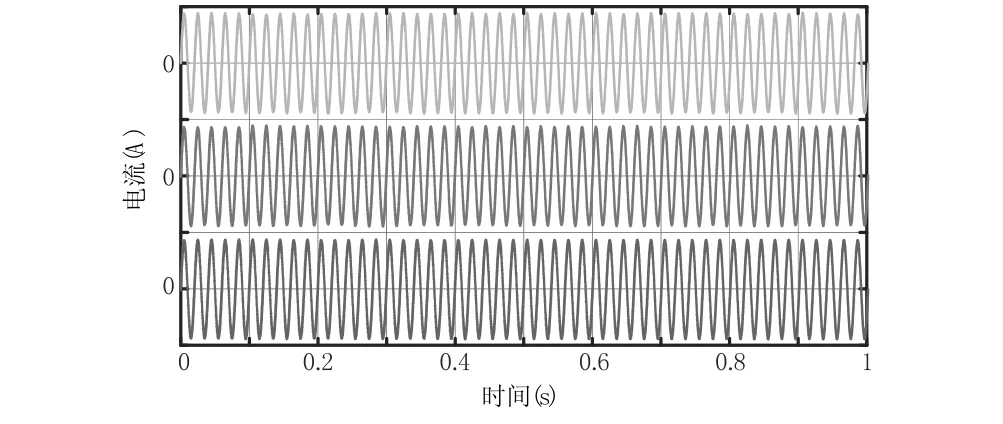
圖2 電感為2 mH,輸出功率為20 kW,且采用PI方式控制零序電流時,三路變流器的A相輸出電流波形Fig.2 Output currentwaveform of phase A with PI control when inductance is 2 mH and output power is 20 kW
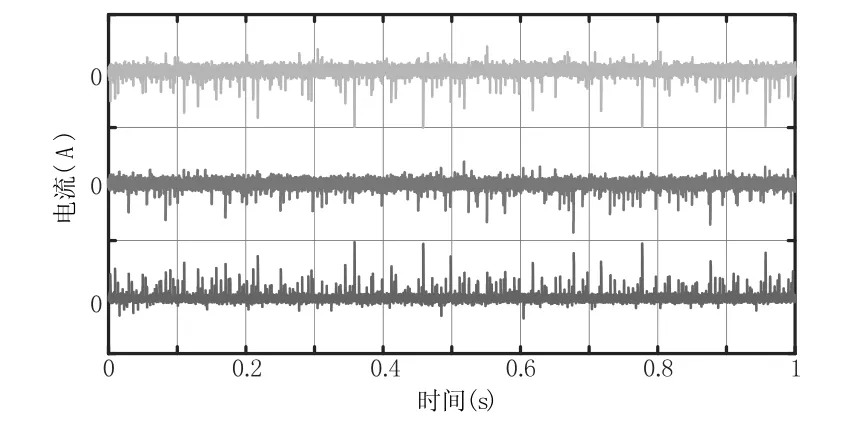
圖3 電感為2 mH,輸出功率為20 kW,且采用PI方式控制零序電流時,三路變流器的零序電流波形Fig.3 Zero-sequence currentwaveform with PI control when inductance is 2 mH and output power is 20 kW
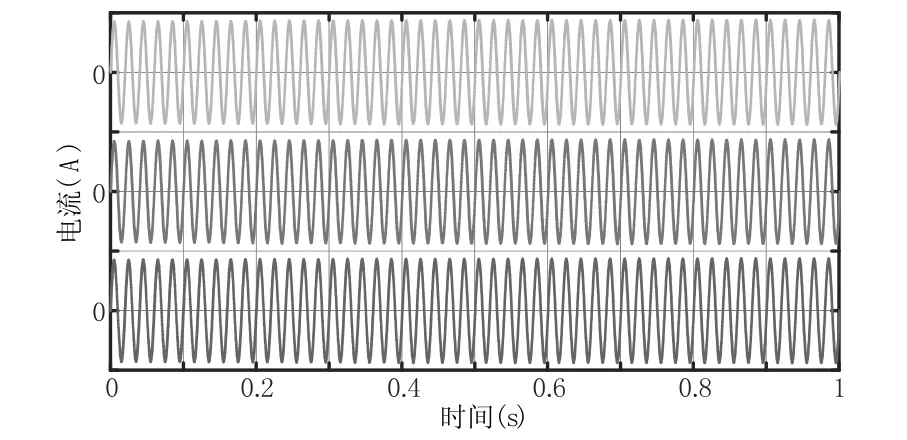
圖4 電感為2 mH,輸出功率為20 kW,且采用無差拍方式控制零序電流時,三路變流器的A相輸出電流波形Fig.4 Output currentwaveform of phase A with deadbeat controlmode when inductance is 2 mH and output power is 20 kW
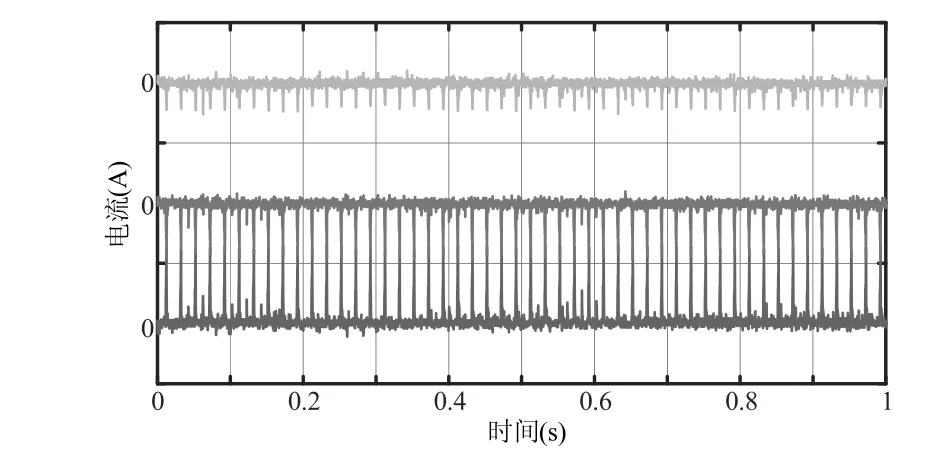
圖5 電感為2 mH,輸出功率分別為20 kW,且采用無差拍方式控制零序電流時,三路變流器的零序電流波形Fig.5 Zero-sequence currentwaveform with deadbeat control when inductance is 2 mH and output power is 20 kW
從仿真結果中可以看出,采用PI控制以及采用無差拍方法控制均可以對三路并聯系統的零序環流起到較好的控制效果。采用無差拍控制對零序環流的抑制能力更好,但采用無差拍控制時,零序電流會出現較大的毛刺現象。
在實際應用時,會遇到三路變流器輸出功率不相同的情況,本文也就此情況進行了仿真分析,將三路變流器的輸出功率分別設置為20 kW、17.5 kW和15 kW。仿真得到的三路變流器的輸出電流以及各各自的零序電流大小如圖6至圖9所示。從仿真結果中可以看出,三個變流器的零序電流較小,三個變流器各自的輸出電流波形較好。采用無差拍控制方法時,存在明顯毛刺現象,應該是此時兩路變流器的驅動信號之間存在較大差異,無差拍方法可以迅速平衡該差異,保證零序電流在較小的范圍內。
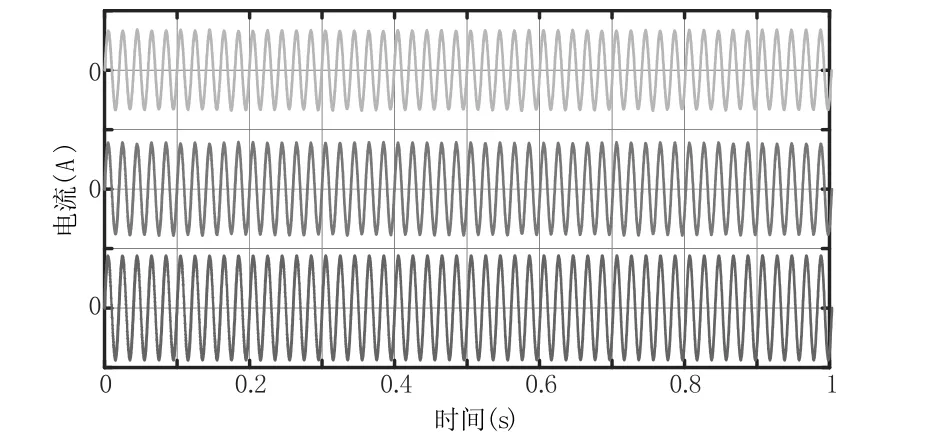
圖6 電感為2 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用PI方式控制零序電流時,三路變流器的A相輸出電流波形Fig.6 Output currentwaveform of phase A with PI controlwhen inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW
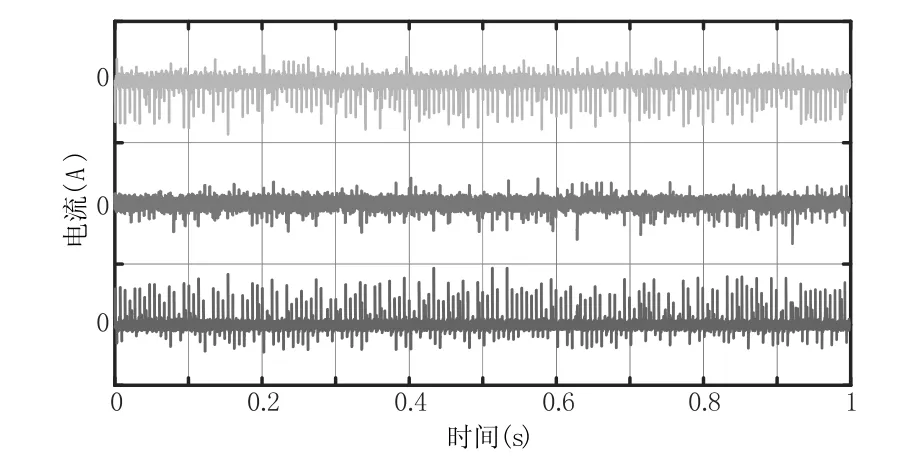
圖7 電感為2 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用PI方式控制零序電流時,三路變流器的零序電流波形Fig.7 Zero-sequence currentwaveform with PI control when inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW
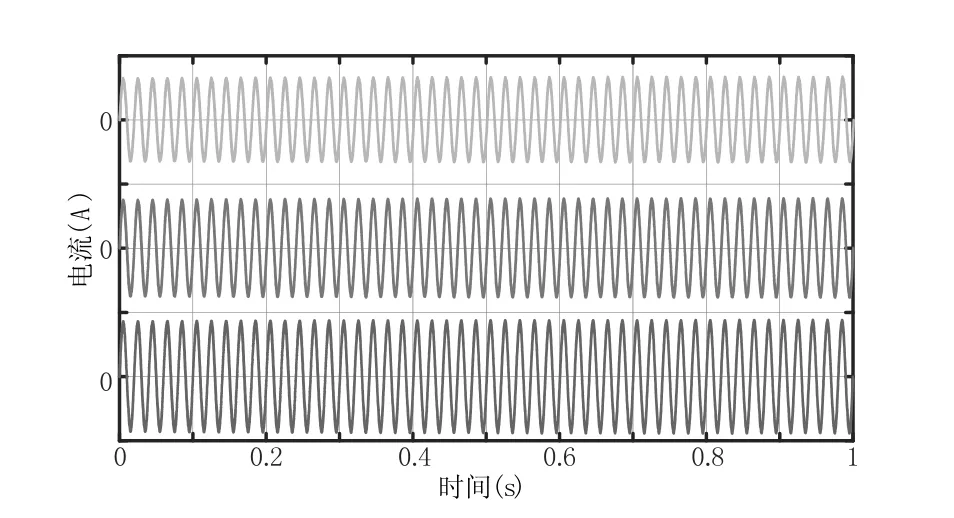
圖8 電感為2 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用無差拍方式控制零序電流時,三路變流器的A相輸出電流波形Fig.8 Output currentwaveform of phase A with deadbeat controlwhen inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW
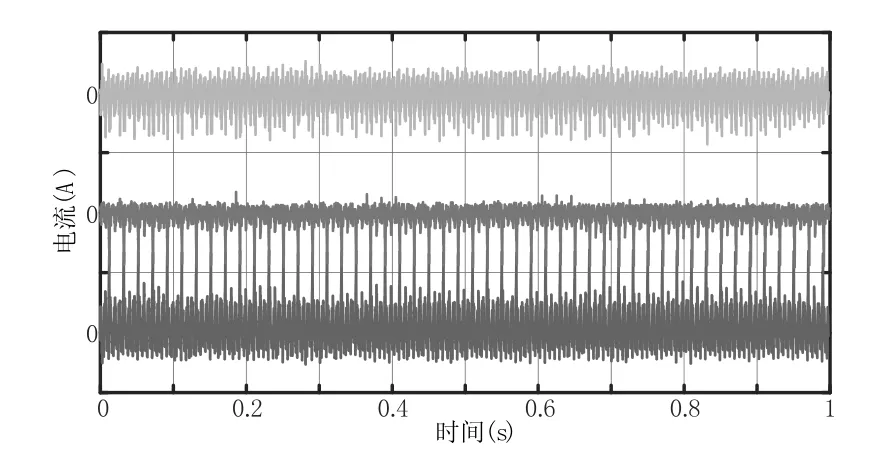
圖9 電感分別為2 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用無差拍方式控制零序電流時,三路變流器的零序電流波形Fig.9 Zero-sequence currentwaveform with deadbeat control when inductance is 2 mH and output power is 20 kW,17.5 kW,15 kW
最后,考慮在裝置的實際生產過程中產生的參數誤差,以及如果選用不同批次、不同廠家的生產的變流器組成并聯系統,本文更改了各個變流器的濾波電感參數,將變流器的濾波電感參數分別設置為1.5 mH、2 mH和2.5 mH。各個模塊的輸出功率分別為20 kW、17.5 kW和15 kW。仿真得到的結果如圖10~圖13所示。
從圖10中~圖13可以得到,兩種方法均可以實現對零序電流較好的控制作用。輸出電流均沒有出現明顯畸變。但是,采用無差拍控制出現了零序電流峰峰值較大的情況,這一點與濾波電感相同、輸出功率不同時的情況一致。因此,本文認為無差拍控制在對濾波電感不同時的并聯系統零序電流控制存在一定的不足,但是仍有一定的控制作用。
結合上述三組實驗,得出以下結論:采用PI控制和無差拍控制均可以實現并聯系統的零序電流控制,但是控制效果略有不同,其中PI控制方式較為穩定,其控制結果與并聯系統中變流器的濾波電感大小以及變流器輸出功率關系不是很大,具有一定的獨立性。而采用無差拍控制方式的控制效果與變流器輸出功率有一定關系。此外,在仿真中,發現零序電流存在一定的突變現象,本文認為這是由于變流器之間存在微弱的相位差,在采用空間矢量變換時,各個模塊在切換所在空間區域時,存在一定的時間差,導致模塊間的開關狀態出現較大不一致導致的。
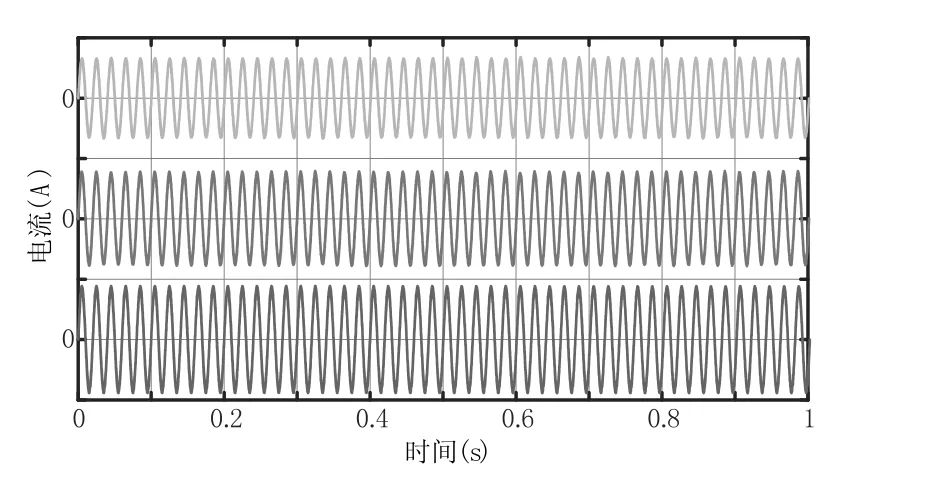
圖10 電感分別為1.5 mH、2 mH、2.5 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用PI方式控制零序電流時,三路變流器的A相輸出電流波形Fig.10 Output currentwaveform of phase A with PI controlwhen inductance is 1.5 mH,2 mH,2.5 mH and output power is 20 kW,17.5 kW and 15 kW
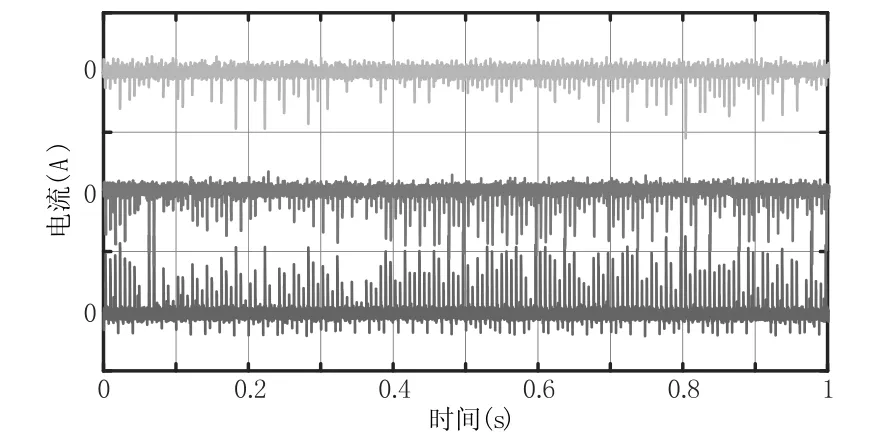
圖11 電感分別為1.5 mH、2 mH、2.5 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用PI方式控制零序電流時,三路變流器的零序電流波形Fig.11 Zero-sequence currentwaveform with PI controlwhen inductance is 1.5 mH,2 mH,2.5 mH and output power is 20 kW,17.5 kW,15 kW
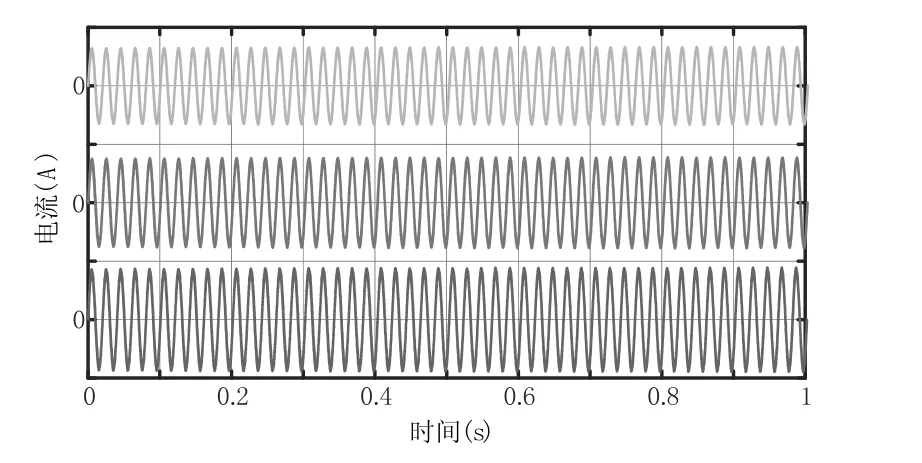
圖12 電感分別為1.5mH、2mH、2.5mH,輸出功率分別為20kW、17.5kW、15kW,且采用無差拍方式控制零序電流時,三路變流器的A相輸出電流波形Fig.12 Output currentwaveform of phase A with deadbeat controlwhen inductance is 1.5mH,2mH,2.5mH and output power is 20kW,17.5kW and 15kW
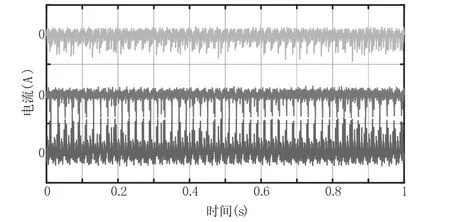
圖13 電感分別為1.5 mH、2 mH、2.5 mH,輸出功率分別為20 kW、17.5 kW、15 kW,且采用無差拍方式控制零序電流時,三路變流器的零序電流波形Fig.13 Zero-sequence currentwaveform with deadbeat control when inductance is 1.5 mH,2 mH,2.5 mH and output power is 20 kW,17.5 kW,15 kW
4 結束語
本文分析了三路變流器并聯系統零序電流產生的原因,并給出了變流器并聯系統中零序環路的PI抑制方法和無差拍抑制方法。利用SIMULINK建立了變流器并聯系統的仿真模型,驗證了上述兩種方法的可行性。仿真結果表明,PI抑制方法和無差拍抑制方法均可以有效的抑制并聯系統的零序環流,但PI抑制方法在三個或者多個變流器組成的并聯系統上,對零序電流的控制效果更加穩定,與變流器的輸出功率以及各個模塊的濾波電感關系并不大,在工程實踐中有更大的應用范圍。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
