一種統(tǒng)一慣性導(dǎo)航方法
2017-12-20 05:01:57魏宗康黃云龍
導(dǎo)航與控制 2017年6期
關(guān)鍵詞:系統(tǒng)
魏宗康,黃云龍
(北京航天控制儀器研究所,北京100039)
一種統(tǒng)一慣性導(dǎo)航方法
魏宗康,黃云龍
(北京航天控制儀器研究所,北京100039)
捷聯(lián)式和平臺(tái)式慣性導(dǎo)航系統(tǒng)的導(dǎo)航方程不同:同一慣性測(cè)量系統(tǒng)選取不同導(dǎo)航坐標(biāo)系時(shí),導(dǎo)航方程也不同;各類(lèi)力學(xué)編排形式多樣、結(jié)構(gòu)復(fù)雜且輸出結(jié)果具有局限性。針對(duì)這些問(wèn)題,提出一種統(tǒng)一慣性導(dǎo)航方法。慣性導(dǎo)航試驗(yàn)結(jié)果表明,基于統(tǒng)一慣性導(dǎo)航方程與基于傳統(tǒng)慣性導(dǎo)航方程解算的結(jié)果一致,驗(yàn)證了統(tǒng)一慣性導(dǎo)航方程的有效性。
慣性導(dǎo)航;導(dǎo)航方程;平臺(tái)慣性導(dǎo)航;捷聯(lián)慣性導(dǎo)航
0 引言
慣性導(dǎo)航系統(tǒng)基于經(jīng)典牛頓力學(xué)進(jìn)行積分解算,解算的基礎(chǔ)是載體在導(dǎo)航坐標(biāo)系中的受力情況,以及導(dǎo)航坐標(biāo)系相對(duì)慣性坐標(biāo)系的旋轉(zhuǎn)[1]。平臺(tái)式慣性導(dǎo)航系統(tǒng)基于臺(tái)體坐標(biāo)系量測(cè),臺(tái)體坐標(biāo)系模擬導(dǎo)航坐標(biāo)系,使慣性測(cè)量信息在導(dǎo)航坐標(biāo)系中輸出,并直接用于導(dǎo)航解算;捷聯(lián)式慣性導(dǎo)航系統(tǒng)基于載體坐標(biāo)系量測(cè),通過(guò)計(jì)算機(jī)使用解析方法得到導(dǎo)航坐標(biāo)系信息,并將慣性測(cè)量信息投影到導(dǎo)航坐標(biāo)系后,才繼續(xù)完成導(dǎo)航解算[2-3]。
目前,捷聯(lián)式慣性導(dǎo)航系統(tǒng)的力學(xué)編排和平臺(tái)式慣性導(dǎo)航系統(tǒng)的力學(xué)編排不同[4-6],而且同一個(gè)慣性導(dǎo)航系統(tǒng)在不同導(dǎo)航坐標(biāo)系下的力學(xué)編排也不同,形式多樣,結(jié)構(gòu)復(fù)雜。基于地固坐標(biāo)系(e)的導(dǎo)航方程只輸出笛卡兒坐標(biāo)形式的位置矢量,基于地理坐標(biāo)系(L)和游移方位坐標(biāo)系(W)的導(dǎo)航方程只輸出地理坐標(biāo);在平臺(tái)式慣性導(dǎo)航系統(tǒng)中,僅基于臺(tái)體坐標(biāo)系(模擬導(dǎo)航坐標(biāo)系)進(jìn)行導(dǎo)航解算。
針對(duì)上述問(wèn)題,本文主要研究一種統(tǒng)一慣性導(dǎo)航方法。將平臺(tái)系統(tǒng)的臺(tái)體坐標(biāo)系和捷聯(lián)系統(tǒng)中的載體坐標(biāo)系統(tǒng)一表示為量測(cè)坐標(biāo)系(p);姿態(tài)更新包括量測(cè)坐標(biāo)系(p)相對(duì)于導(dǎo)航坐標(biāo)系(n)和地固坐標(biāo)系(e)相對(duì)于導(dǎo)航坐標(biāo)系(n)兩部分;速度更新統(tǒng)一在地固坐標(biāo)系(e)下完成;位置更新包括地理坐標(biāo)更新和地固矢量更新兩部分。統(tǒng)一慣性導(dǎo)航方程結(jié)構(gòu)清晰,物理意義明確,位置結(jié)果包括地理坐標(biāo)和地固矢量?jī)刹糠郑欢覒T性平臺(tái)系統(tǒng)的臺(tái)體可不跟蹤導(dǎo)航坐標(biāo)系(n);最后,還通過(guò)慣性導(dǎo)航試驗(yàn)驗(yàn)證了統(tǒng)一慣性導(dǎo)航方程的有效性。
1 不同形式的慣性導(dǎo)航方程
采用傳統(tǒng)慣性導(dǎo)航方法時(shí),不同慣性測(cè)量系統(tǒng)的導(dǎo)航方程不同,不同導(dǎo)航坐標(biāo)系(n)對(duì)應(yīng)的導(dǎo)航方程也不同[5-7]。
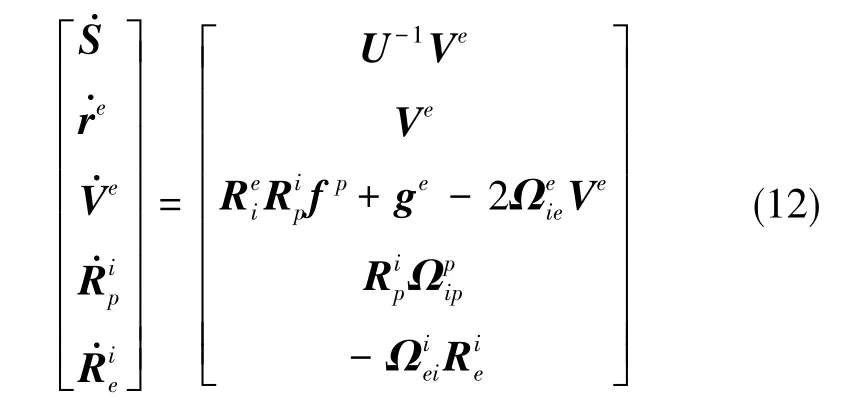
1)導(dǎo)航坐標(biāo)系(n)選為慣性坐標(biāo)系(i)時(shí),平臺(tái)式和捷聯(lián)式慣性導(dǎo)航系統(tǒng)的導(dǎo)航方程依次為:
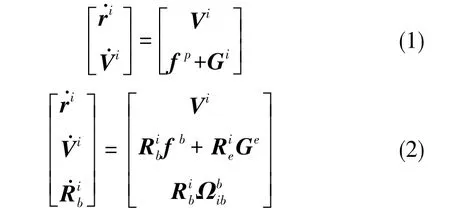
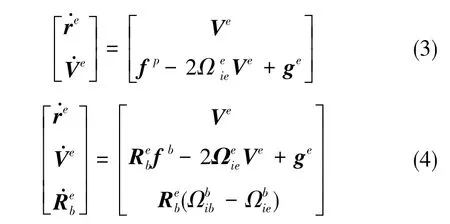
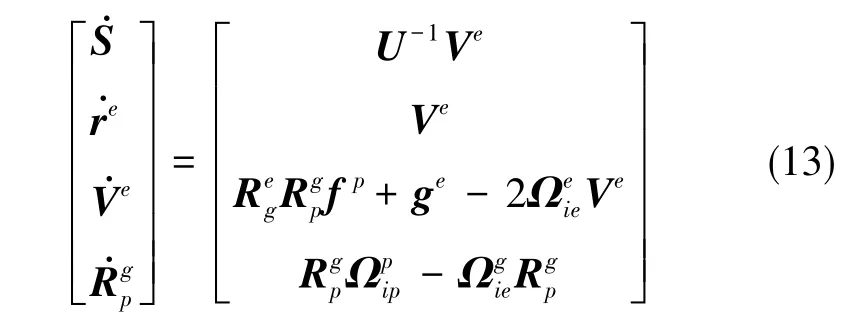
2)導(dǎo)航坐標(biāo)系(n)選為地固坐標(biāo)系(e)時(shí),平臺(tái)式和捷聯(lián)式慣性導(dǎo)航系統(tǒng)的導(dǎo)航方程依次為:
3)導(dǎo)航坐標(biāo)系(n)選為地理坐標(biāo)系(L)時(shí),平臺(tái)式和捷聯(lián)式慣性導(dǎo)航系統(tǒng)的導(dǎo)航方程依次為:
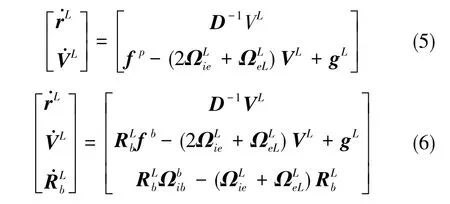
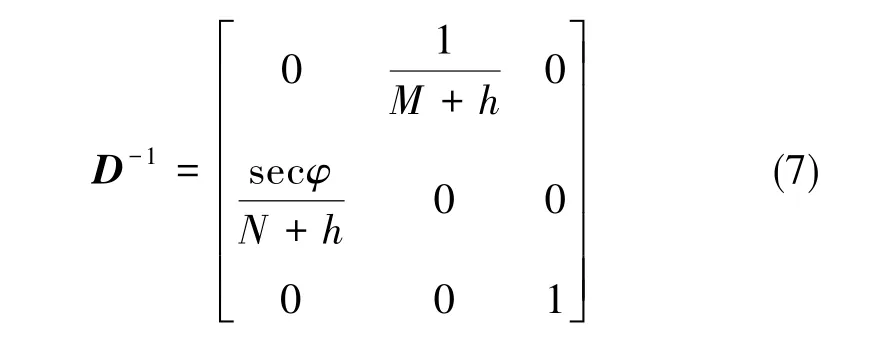
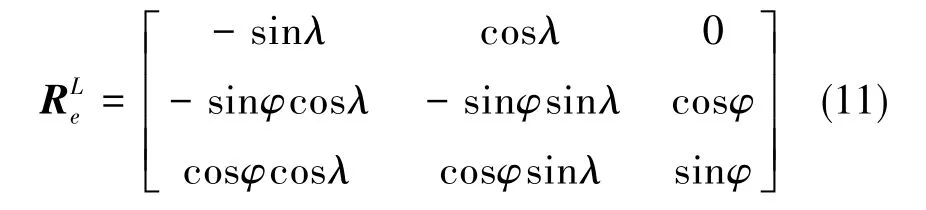
其中,D-1為地理速度VL到地理坐標(biāo)(緯度φ、經(jīng)度λ和高度h)微分的關(guān)系矩陣,而且:
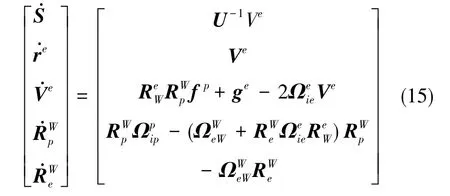
4)導(dǎo)航坐標(biāo)系(n)選為游移方位坐標(biāo)系(W)時(shí),平臺(tái)式和捷聯(lián)式慣性導(dǎo)航系統(tǒng)的導(dǎo)航方程依次為:

根據(jù)上述方程可知,捷聯(lián)式慣性導(dǎo)航系統(tǒng)和平臺(tái)式慣性導(dǎo)航系統(tǒng)的導(dǎo)航方程不同,同一個(gè)慣性導(dǎo)航系統(tǒng)選取不同導(dǎo)航坐標(biāo)系時(shí)的導(dǎo)航方程也不同,各類(lèi)慣性導(dǎo)航方程形式多樣,結(jié)構(gòu)復(fù)雜;位置解算具有局限性,只輸出地固矢量或者地理坐標(biāo)。
2 統(tǒng)一形式的慣性導(dǎo)航方程
不同形式慣性導(dǎo)航系統(tǒng)結(jié)構(gòu)和分類(lèi)過(guò)于復(fù)雜,不能同時(shí)適用于平臺(tái)式和捷聯(lián)式慣性導(dǎo)航系統(tǒng),不能同時(shí)適用于不同導(dǎo)航坐標(biāo)系,而且輸出位置結(jié)果具有局限性。針對(duì)這些問(wèn)題,給出統(tǒng)一慣性導(dǎo)航方程如式(10)所示。

式中,坐標(biāo)系(p)為量測(cè)坐標(biāo)系,表示平臺(tái)系統(tǒng)的臺(tái)體坐標(biāo)系或捷聯(lián)系統(tǒng)的載體坐標(biāo)系;為角速度矢量的叉乘反對(duì)稱(chēng)陣,表示平臺(tái)系統(tǒng)的指令角速度或捷聯(lián)系統(tǒng)的陀螺儀測(cè)量角速度;U-1為地速Ve到地理坐標(biāo)微分?S的關(guān)系矩陣,U-1=根據(jù)式(7)確定,為地固坐標(biāo)系(e)到地理坐標(biāo)系(L)的坐標(biāo)變換矩陣,而且:
統(tǒng)一慣性導(dǎo)航方程的導(dǎo)航坐標(biāo)系(n)可以任意選取,量測(cè)坐標(biāo)系(p)同時(shí)適用于捷聯(lián)系統(tǒng)和平臺(tái)系統(tǒng),且平臺(tái)系統(tǒng)的臺(tái)體可不跟蹤導(dǎo)航坐標(biāo)系。
3 統(tǒng)一慣性導(dǎo)航方程的適用性
統(tǒng)一慣性導(dǎo)航方程具有廣泛適用性,導(dǎo)航坐標(biāo)系(n)不同時(shí),分別有如下結(jié)果。
1)基于任意慣性坐標(biāo)系(i)的慣性導(dǎo)航方程為:
3)基于地理坐標(biāo)系(L)的慣性導(dǎo)航方程為:

4)基于游移方位坐標(biāo)系(W)的慣性導(dǎo)航方程為:
通過(guò)與不同形式的慣性導(dǎo)航方程對(duì)比,統(tǒng)一形式慣性導(dǎo)航方程具有廣泛適用性。不僅形式統(tǒng)一、結(jié)構(gòu)簡(jiǎn)單、物理意義明確,而且位置結(jié)果包括地理坐標(biāo)和地固矢量?jī)刹糠帧?/p>
4 試驗(yàn)驗(yàn)證
4.1 平臺(tái)式慣性導(dǎo)航系統(tǒng)試驗(yàn)
基于慣性平臺(tái)地面跑車(chē)試驗(yàn)進(jìn)行導(dǎo)航解算,試驗(yàn)臺(tái)體模擬游移方位坐標(biāo)系(W)。基于傳統(tǒng)導(dǎo)航方程選用(e)系、(L)系和(W)系為導(dǎo)航坐標(biāo)系(n)時(shí),依次解算得到結(jié)果1、結(jié)果2和結(jié)果3;基于統(tǒng)一慣性導(dǎo)航方程分別選用(e)系、(L)系和(W)系為導(dǎo)航坐標(biāo)系(n)時(shí),依次解算得到結(jié)果4、結(jié)果5和結(jié)果6。
圖1和圖2分別給出以上6種慣性導(dǎo)航方法解算得到的速度和位置結(jié)果。其中,圖1先后給出東向、北向和天向速度,圖2先后給出緯度、經(jīng)度和高度。經(jīng)比較,6種慣性導(dǎo)航方法解算得到的速度曲線(xiàn)和位置曲線(xiàn)都基本重合。表1則給出6種慣性導(dǎo)航方法在t=10000s時(shí)的地理坐標(biāo)結(jié)果。
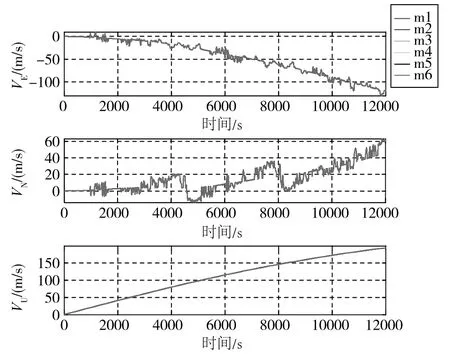
圖1 速度曲線(xiàn)(PINS)Fig.1 Curve of velocity (PINS)

圖2 位置曲線(xiàn)(PINS)Fig.2 Curve of position (PINS)
平臺(tái)式慣性導(dǎo)航系統(tǒng)跑車(chē)試驗(yàn)結(jié)果顯示,基于統(tǒng)一慣性導(dǎo)航方程解算的結(jié)果4、結(jié)果5、結(jié)果6與基于傳統(tǒng)慣性導(dǎo)航方程解算的結(jié)果1、結(jié)果2、結(jié)果3一致,驗(yàn)證了統(tǒng)一慣性導(dǎo)航方程的有效性。

表1 t=10000s時(shí)位置解算結(jié)果(PINS)Table 1 Result of position at the ten thousandth second(PINS)
4.2 捷聯(lián)式慣性導(dǎo)航系統(tǒng)試驗(yàn)
基于捷聯(lián)式慣性導(dǎo)航系統(tǒng)的船舶試驗(yàn)進(jìn)行導(dǎo)航解算。試驗(yàn)時(shí),船舶停在碼頭,船體受到海浪拍打而發(fā)生微小范圍的運(yùn)動(dòng)。基于傳統(tǒng)導(dǎo)航方程選用(e)系、(L)系和(W)系為導(dǎo)航坐標(biāo)系(n)時(shí),依次解算得到結(jié)果1、結(jié)果2和結(jié)果3;基于統(tǒng)一慣性導(dǎo)航方程分別選用(e)系、(L)系和(W)系為導(dǎo)航坐標(biāo)系(n)時(shí),依次解算得到結(jié)果4、結(jié)果5和結(jié)果6。
圖3、圖4和圖5分別給出以上6種慣性導(dǎo)航方法解算得到的姿態(tài)角、速度和位置結(jié)果。其中,圖3先后給出偏航角、俯仰角和滾轉(zhuǎn)角,圖4先后給出東向、北向和天向速度,圖5先后給出緯度、經(jīng)度和高度。經(jīng)比較,6種慣性導(dǎo)航方法解算得到的姿態(tài)曲線(xiàn)、速度曲線(xiàn)和位置曲線(xiàn)都基本重合。表2給出6種慣性導(dǎo)航方法在t=4000s時(shí)的地理坐標(biāo)結(jié)果。
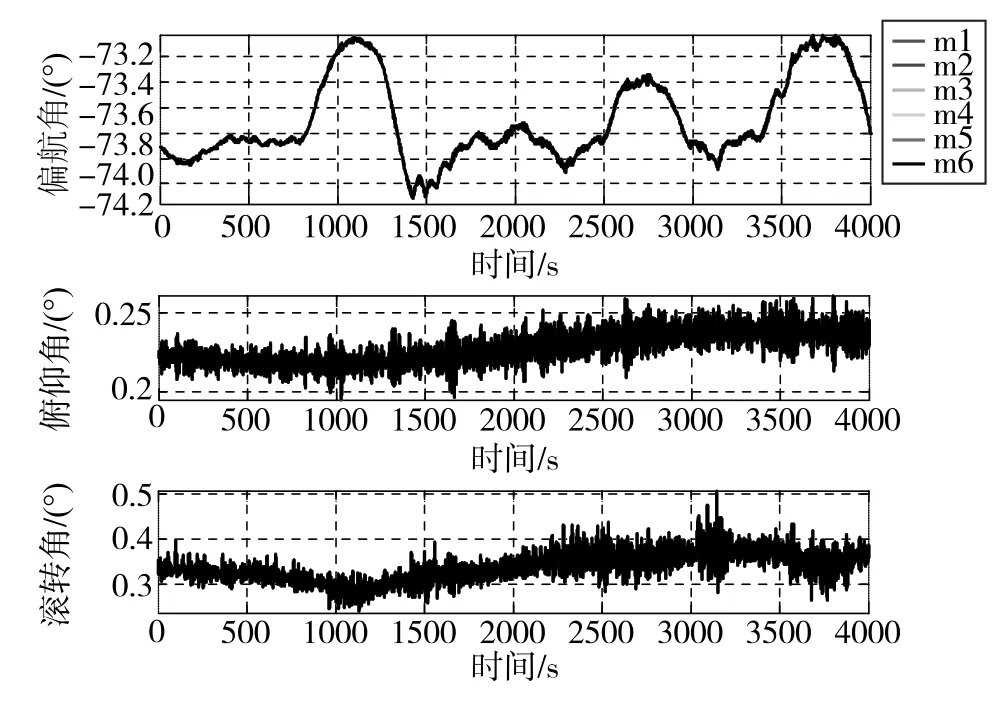
圖3 姿態(tài)角曲線(xiàn)(SINS)Fig.3 Curve of attitude (SINS)

圖4 速度曲線(xiàn)(SINS)Fig.4 Curve of velocity (SINS)
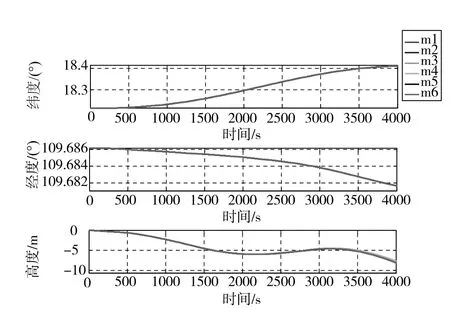
圖5 位置曲線(xiàn)(SINS)Fig.5 Curve of position (SINS)
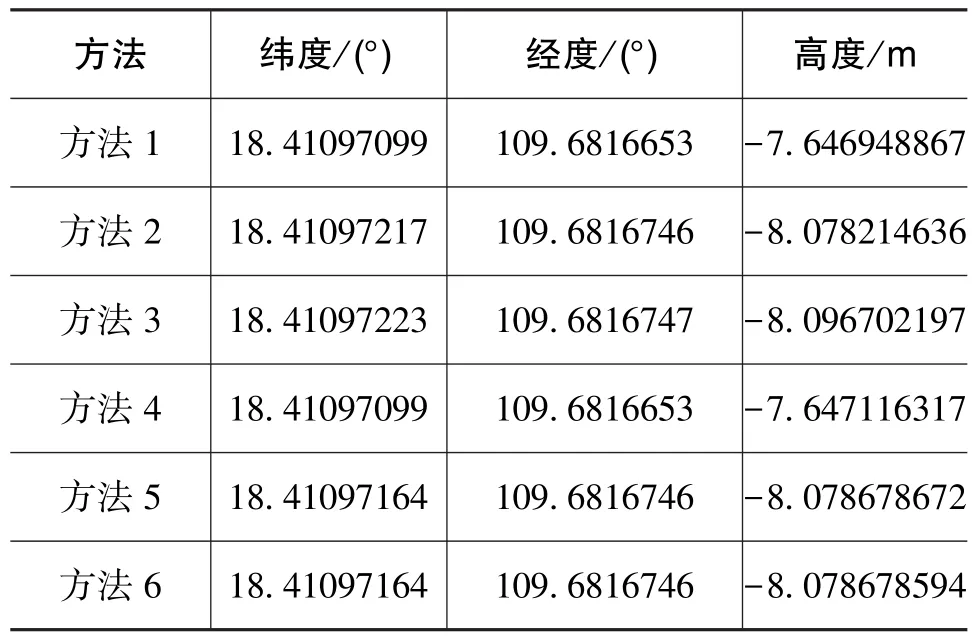
表2 t=4000秒時(shí)位置解算結(jié)果(SINS)Table 2 Result of position at the four thousandth second(SINS)
捷聯(lián)式慣性導(dǎo)航系統(tǒng)船舶試驗(yàn)結(jié)果顯示,基于統(tǒng)一慣性導(dǎo)航方程解算的結(jié)果4、結(jié)果5、結(jié)果6與基于傳統(tǒng)慣性導(dǎo)航方程解算的結(jié)果1、結(jié)果2、結(jié)果3一致,驗(yàn)證了統(tǒng)一慣性導(dǎo)航方程的有效性。
5 結(jié)論
本文針對(duì)現(xiàn)有各類(lèi)力學(xué)編排形式多樣、結(jié)構(gòu)復(fù)雜且輸出結(jié)果具有局限性的問(wèn)題,提出一種統(tǒng)一慣性導(dǎo)航方程。在地固坐標(biāo)系(e)下完成速度更新,給出地固矢量和地理坐標(biāo)兩部分的位置更新,且慣性平臺(tái)系統(tǒng)的臺(tái)體可不跟蹤導(dǎo)航坐標(biāo)系(n)。通過(guò)平臺(tái)式和捷聯(lián)式慣性試驗(yàn)的導(dǎo)航解算,驗(yàn)證了統(tǒng)一導(dǎo)航方程的有效性。
[1]陳開(kāi)權(quán).慣性導(dǎo)航的理論基礎(chǔ)[J].水雷戰(zhàn)與船艦防護(hù),2013(1): 12-16.CHEN Kai-quan.Basic theories of inertial navigation[J].Mine Warfare & Ship Self-Defence,2013(1): 12-16.
[2]陸元九.慣性器件[M].北京:中國(guó)宇航出版社,1990.LU Yuan-jiu.Inertial devices[M].Beijing:China Aerospace Press,1990.
[3]中國(guó)慣性技術(shù)學(xué)會(huì).慣性技術(shù)詞典[M].北京:中國(guó)宇航出版社,2009.Chinese Society of Inertial Technology.Dictionary of inertial technology[M].Beijing: China Aerospace Press,2009.
[4]以光衢,王惠南,郭富強(qiáng),等.慣性導(dǎo)航原理[M].北京:航空工業(yè)出版社,1987.YI Guang-qu,WANG Hui-nan,GUO Fu-qiang,et al.Inertial navigation theories[M].Beijing:Aircraft Industry Press,1987.
[5]秦永元.慣性導(dǎo)航[M].北京:科學(xué)出版社,2007.QIN Yong-yuan.Inertial navigation[M].Beijing:Science Press,2007.
[6]任思聰.實(shí)用慣性導(dǎo)航原理[M].北京:中國(guó)宇航出版社,1988.REN Si-cong.Useful inertial navigation theories[M].Beijing: China Aerospace Press,1988.
[7]周琪,秦永元,付強(qiáng)文,等.極區(qū)飛行格網(wǎng)慣性導(dǎo)航算法原理[J].西北工業(yè)大學(xué)學(xué)報(bào),2013,31(2): 210-217.ZHOU Qi,QIN Yong-yuan,F(xiàn)U Qiang-wen,et al.Inertial navigation algorithm theories of grid while flying in polar areas[J].Journal of Northwestern Polytechnical University,2013,31(2): 210-217.
A Kind of Unified Inertial Navigation Method
WEI Zong-kang,HUANG Yun-long
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
Aiming at the problem that strapdown inertial navigation system (SINS)and platform inertial navigation system (PINS)have different navigation equations: an inertial measurement system would also have different navigation equations while choosing a variety of navigation coordinates,mechanical arrangements have different forms,complicated structures and limited output,a kind of unified inertial navigation method was put forward.The results of the inertial navigation test show that the results based on the unified inertial navigation equation are consistent with those calculated by traditional inertial navigation equations,and the validity of the unified inertial navigation equation is verified.
inertial navigation;navigation equation;platform inertial navigation system;strapdown inertial navigation system
U666.1
A
1674-5558(2017)01-01391
10.3969/j.issn.1674-5558.2017.06.001
2017-04-15
國(guó)防科技創(chuàng)新特區(qū)(編號(hào):17-0163-15-XJ-002-002-10)
魏宗康,男,研究員,研究方向?yàn)閷?dǎo)航、制導(dǎo)與控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
