弧焊機器人和變位機協調運動分析及模擬仿真
2017-12-19 07:32:55邵長春李水明
廣西教育·C版 2017年10期
邵長春+李水明
【摘 要】本文建立弧焊機器人和變位機耦合性數學模型,在MATLAB仿真軟件環境下,采用MATLAB神經網絡對運動方程進行模擬仿真。
【關鍵詞】弧焊機器人 變位機 耦合 MATLAB
【中圖分類號】G 【文獻標識碼】A
【文章編號】0450-9889(2017)10C-0188-03
變位機與機器人間的協調工作,使得焊接過程存在的平、橫、立、仰問題歸結為平焊過程,文中提到的最佳待焊位置指的就是焊縫水平位置。為了提高焊接強度,降低焊接工藝的復雜程度,進而提高焊接的質量和效率,弧焊機器人和變位機要達到協調運動。因此建立相應的數學模型并對模型進行理論分析非常重要。
弧焊機器人變位機工作系統中各個功能模塊可以建立相應的數學模型,但建立的數學模型要用到非常多的數學公式。通過人工計算不現實,也不能看出機器人變位機之間的相互影響關系。為了能夠直觀了解機器人變位機之間的耦合性能,對所建立的數學模型進行模擬仿真。
MATLAB軟件是計算機技術以及數學理論發展的產物,功能強大,尤其在矩陣運算方面,因此得到廣泛應用。本文利用MATLAB軟件對所建立的數學模型進行模擬仿真,探索弧焊機器人變位機離線編程的方法。
一、理論基礎
(一)弧焊機器人變位機運動學原理
矩陣運算可以表示某一點、一個向量、特定坐標系的平移運動、旋轉運動。在實際的工程設備中,矩陣可表示一個物體或者其它的運動組件在坐標系運動。本文研究的就是用矩陣來表示弧焊機器人變位機的各個功能模塊和各個組件的相對運動關系。
本文以IRB1400型號機器人作為研究的對象,該型號機器人模型有六個關節角度,具體如圖1所示:
IRB1400型號機器人主要參數指標是:關節轉角、連桿扭角、連桿長度、連桿距離和連桿的個數。這些參數決定了機器人的運動范圍。具體參數如表1所示:
變位機工作原理就是拖動待焊工件,使焊縫不斷移動到最佳待焊位置。變位機的主要參數:θα和θβ,代表兩個關節角度。為了便于分析,在建立運動學數學模型時,往往選取變位機作為弧焊機器人系統的一部分,如圖3所示:
依據D-H描述法,確定每一個桿件的參數和相互關系,在每一個連桿上設置一個坐標系,用矩陣變換原理來表達相鄰連桿的參數和相互關系,包括焊槍和變位機待焊點之間的關系。
根據D-H描述法,在弧焊機器人各個關節的位置變換中,第N+1關節的局部坐標系相對前一坐標系N的位置姿態矩陣的表示如下:
二、對運動方程模型進行模擬仿真
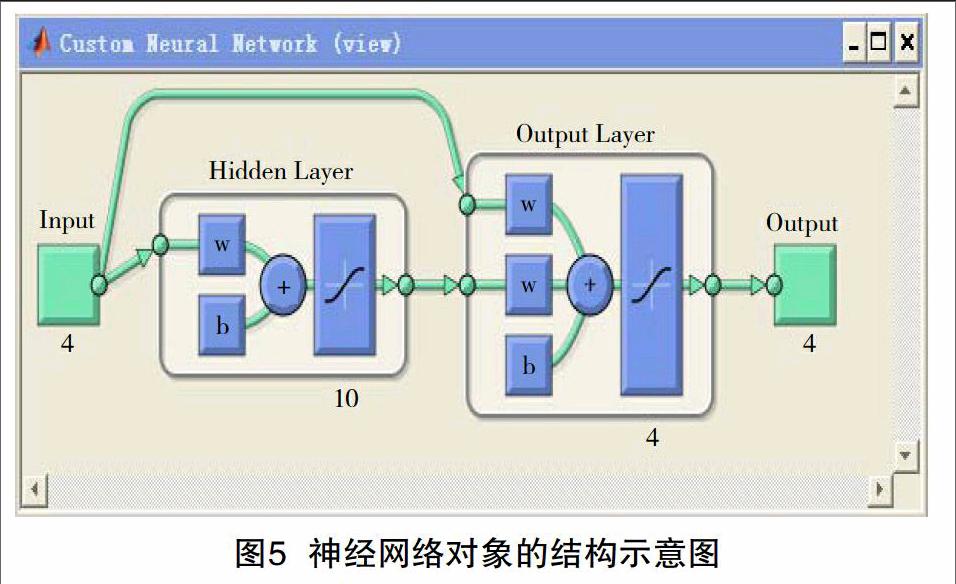
(一)基于神經網絡模擬仿真的建立
通過矩陣的變換運算,可以對弧焊機器人變位機系統運動進行正解和逆解運算并可以建立相應的數學模型。通過正解與逆解運算公式的程序求解,即可以把弧焊機器人變位機系統的運動進行量化。當正解與逆解運算的因果關系對應,則可以說明運動模型是正確的;反之,可以認為數學模型建立錯誤,相應的運動也會出現錯誤。本文是基于MATLAB神經網絡對運動學模型進行模擬仿真。
弧焊機器人變位機系統在工作過程中會因為自身的的震動而使得焊槍發生抖動現象,會造成焊槍“蟻動”現象,實際焊接位置與理論焊縫有偏差。為此在計算過程中加反饋因數,對實際運動進行實時調整。
表2數據是弧焊機器人變位機系統在實際作業過程中選擇的運動點數據:
MATLAB仿真軟件通過對焊縫上這些特殊點的處理,在模擬仿真過程之前,MATLAB軟件可以得到比較光滑的曲線焊縫。如圖4,就是由已知特殊點生成的焊縫曲線。
利用上一節的運動數學模型公式,在MATLAB里輸入相應的控制程序,焊縫曲線是可以根據特殊點生成。利用MATLAB神經網絡,對模擬程序進行相應的訓練,包括訓練信息Training Info、訓練參數Training。通過訓練,即可以得到模擬仿真圖形。
(二)仿真效果分析
通過對參數訓練和對控制信息的訓練,可以得到各個系統的運動情況。
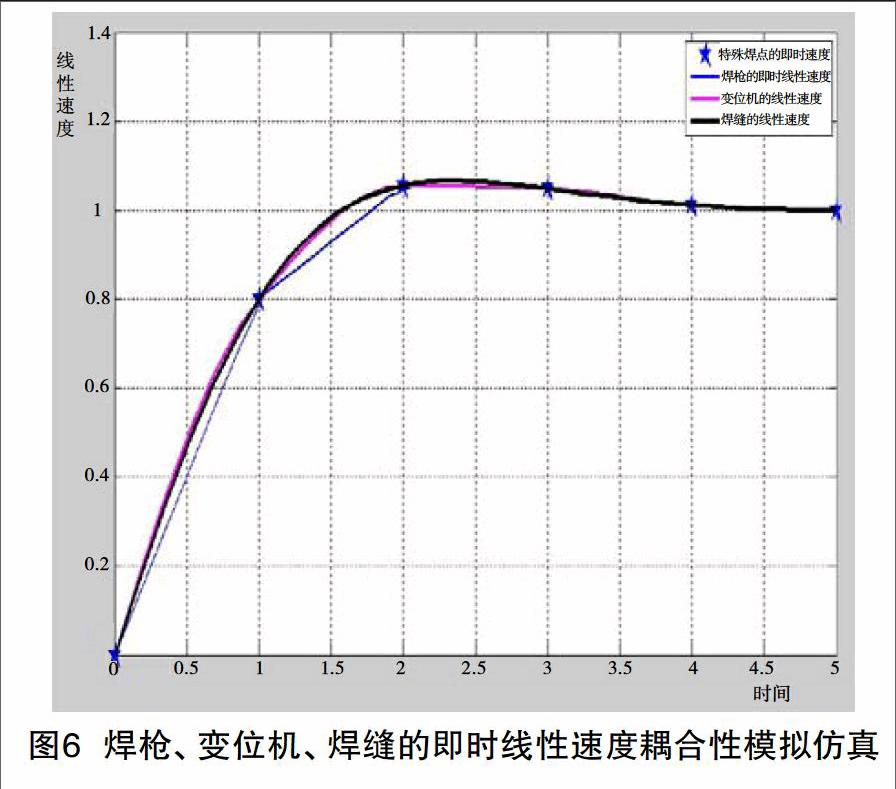
分析誤差范圍,看是否在允許的范圍之內。由圖6可以看出運動時間是0到5秒之間,各個運動的線性速度的波動值的變化在0至1.2之間,完全可以達到精度要求。
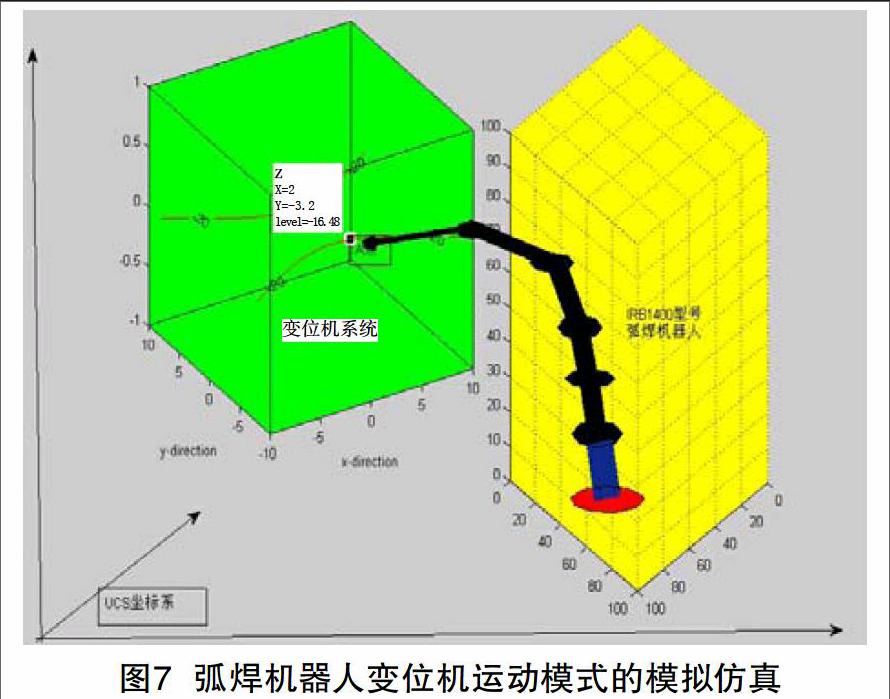
同時,在仿真過程中,可以利用神經網絡系統生成作業示意圖,如圖7所示。
利用MATLAB對系統建立的數學模型進行仿真,容易驗證弧焊機器人變位機系統末端運動軌跡正解矩陣的正確性。除去機械設備本身的因素造成的誤差,如果正解模擬仿真運算與逆解仿真運算相吻合,就可以證明系統模型是正確的。反之,如果正解運算與逆解運算相差太大,則說明模型建立出現了錯誤。通過模擬仿真,可以及時發現問題,并能為實際的作業過程提供理論性的指導。
焊槍位置姿態與變位機位置姿態協調性運動的規劃受很多因素的影響,比如工藝參數、工件形狀和板厚等,其最終的姿態是難以進行精確量化的,所以必須依靠大量的經驗知識積累。因此,將弧焊機器人與變位機的協調運動所得到的數學模型應用于實際生產中,在運算的復雜程度方面得到很大降低。當然,在生產應用中,還要借助其他很多的理論知識,比如基于焊縫特征的焊縫中心線信息獲取方法,智能感應控制實現焊縫的識別等。
【參考文獻】
[1]蔡自興.機器人學[M].北京:清華大學出版社,2000
[2]林尚揚.中國從焊接大國向世界焊接強國邁進——我國焊接生產現狀與發展中的幾個問題[J].航空制造技術,2002(11)
[3]文巨峰,倪受東,顏景平.人工神經網絡在機器人學中的應用探討[J].制造自動化,2001(8)
【作者簡介】邵長春(1985— ),碩士,柳州鐵道職業技術學院講師,研究方向:工業機器人技術及自動化控制。
(責編 丁 夢)endprint
