基于RFID室內定位算法的研究
2017-12-19 07:56:55廣東工業大學鄭卜松朱燕飛
電子世界 2017年23期
關鍵詞:模型
廣東工業大學 鄭卜松 朱燕飛
基于RFID室內定位算法的研究
廣東工業大學 鄭卜松 朱燕飛
在基于RFID的室內定位系統中,普遍存在定位系統定位精度低的問題,環境因素對室內環境下的無線通信有很大的干擾。為解決該問題,提出融合對數路徑損耗模型的landmarc室內定位算法進行室內定位。通過實驗獲取定位區域內接收信號強度指示(RSSI)的對數路徑損耗模型,分別對不同環境下RSSI的對數路徑損耗模型進行仿真,再融合到landmarc室內定位算法中去,在對數路徑損耗模型下通過閱讀器接收信號強度的大小確定節點之間的距離,實現物體的定位。實驗結果表明,融合了RSSI對數路徑損耗模型的landmarc室內定位算法在定位精度上有很大的提高。
RFID;室內定位;landmarc室內定位算法;對數路徑損耗模型
1.引言
Landmark是一種典型的基于RSSI測距的實時室內定位算法,將landmarc室內定位算法引入了RFID參考標簽,可減少定位系統中所需RFID閱讀器的數量,降低定位系統的成本,并且通過參考標簽配合殘差加權算法[1]與最近鄰算法[2]可提高系統定位精度。
2.改進landmarc室內定位算法
2.1 landmarc算法原理
假設在定位區域分別有M個閱讀器和N個參考標簽。第i個待測標簽的信號強度向量定義如下:

式中,t(i,M)表示在第m個閱讀器接收到來自第i個待測標簽的信號強度,1≤m≤M。
第n個參考標簽的信號強度向量定義如下:

式中,r(n,m)表示第m個閱讀器接收到來自第n個參考標簽的信號強度,1≤n≤N。
第i個待測標簽與第n個參考標簽之間的歐幾里得距離[3]E(i,n) 計算如下:

第i個待測標簽的歐幾里得距離向量表示如下:

將第i個待測標簽的歐幾里得距離向量中的元素按從小到大的順序排列,然后得到第i個待測標簽的歐幾里得升序向量:

其中E′(i,1)≤E′(i,2)≤···≤E′(i,N),E′(i,N)越小,表示第i個待測標簽與第n個參考標簽越近。
根據設置好的K值,選取K個與待測標簽最鄰近的參考標簽來對待測標簽進行定位。每個被選中的參考標簽的權重因子[4]計算如下:

其中,1≤k≤K。第i個待測標簽的坐標估計值的計算公式如下:

2.2 對數路徑損耗模型
2.2.1 對數路徑損耗模型
在實際情況中,環境因素對信號的傳播影響很大,導致在實際情況下無線信號的衰減與通信距離沒有固定和穩定的對應關系[5],不同環境下的無線通信有不同的路徑損耗模型,所以正確的路徑損耗模型能夠在很大程度上提升基于RSSI的室內定位精度。
很多研究表明,室內路徑損耗遵從對數距離路徑損耗模型[6],如公式(8)所示:

式中,PL(d0)表示單位距離下的路徑損耗值,單位為dB,d0一般取1m;PL(d)表示距離為d時的路徑損耗值,單位為dB;n表示路徑損耗指數,n越大,路徑損耗則越大,不同環境下n的取值不同;Xσ是服從標準正態分布的隨機變量,標準差為σ。將其轉換為接收信號強度RSSI值表達式為:

2.2.2 對數路徑損耗模型仿真
不同環境下的對數路徑損耗模型的仿真如圖1所示。
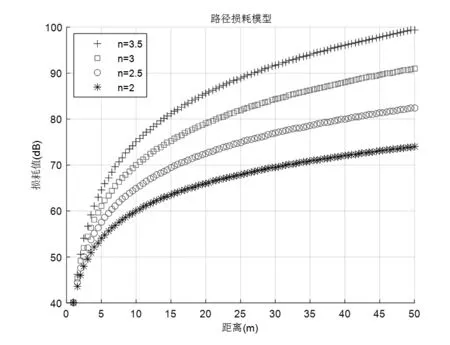
圖1 對數路徑損耗模型仿真
分別對當n=2、n=2.5、n=3、n=3.5進行仿真,明顯可以看出,當n越大時,路徑損耗指數越大,信號衰減越嚴重。閱讀器接收到的來自參考標簽與待測標簽的信號是衰減后的信號,而在空曠區域內這個信號的衰減是遵循對數路徑損耗模型的,將閱讀器接收到的信號采用對數路徑損耗模型來補償[7],閱讀器獲得的便是更加精確的接收信號強度指示值,進而能夠計算出更精確的歐幾里得距離,最后提高算法的定位精度。
2.3 改進landmarc室內定位算法步驟
Step 1:閱讀器通過采用對數路徑損耗模型,獲取分別來自待測標簽與參考標簽的RSSI值。
Step 2:根據閱讀器獲取到的RSSI值,計算待測標簽與參考標簽之間的歐幾里得距離。
Step 3:根據歐幾里得距離的大小選取與待測標簽最鄰近的K個參考標簽來計算權重因子。
Step 4:利用權重因子與被選取參考標簽的實際坐標來計算待測標簽坐標值。
3.仿真實驗
本仿真實驗環境為一個邊長為11米的正方形空曠室內區域。在實驗區域的四個頂點分別部署一臺閱讀器,在實驗區域中以矩陣形式均勻部署100個參考標簽,參考標簽之間的間距為1米。
3.1 仿真結果
3.1.1 原landmarc室內定位算法定位結果
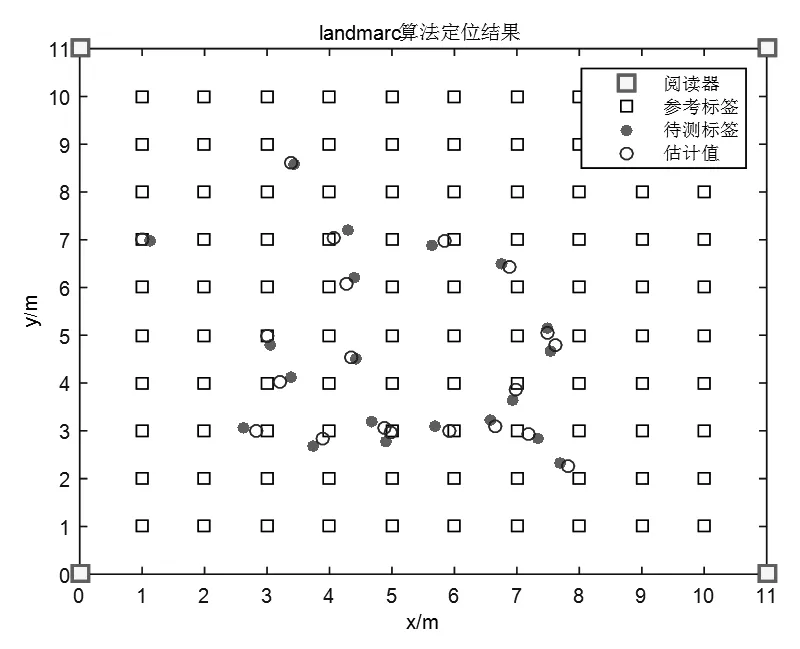
圖2 landmarc室內定位算法定位結果
原landmarc室內定位算法定位結果如圖2所示。從仿真結果中可以清楚的分辨出每個待測標簽位置的實際值與估計值。平均定位誤差為18cm。
3.1.2 改進landmarc室內定位算法定位結果
在系統布局完全相同的情況下,對原landmarc室內定位算法進行改進,引入對數路徑損耗模型。實驗測得空曠室內環境下的路徑損耗指數n=2,Xσ為取標準偏差為5的正態隨機變量。改進后的landmarc室內定位算法結果如圖3所示。

圖3 改進landmarc室內定位算法定位結果
3.2 算法誤差對比分析
圖4的結果顯示,在待測標簽實際位置相同的情況下,改進landmarc室內定位算法比原landmarc室內定位算法的定位誤差小。對于定位區域中的20個待測標簽,經原landmarc室內定位算法定位的平均誤差為0.1834m;經改進landmarc室內定位算法定位的平均誤差為0.09495m。因此通過改進landmarc室內定位算法可以提高室內定位精度。
4.總結
landmarc室內定位算法與改進后的landmarc室內定位算法的定位誤差比結果顯示,改進后的算法在室內定位精度上有明顯的提高。改進后的室內定位算法定位精度保持在10cm左右,比原算法定位精度提高了近一倍。仿真結果驗證了對數路徑損耗模型提高landmarc室內定位算法的可行性,為后續對存在各種障礙物的室內環境下提高landmarc室內定位算法定位精度的研究提供了理論基礎。
[1]曹潔,牛麗波,王進花.一種改進LANDMARC射頻識別室內定位算法[J].計算機工程與科學,2015,37(9):1671-1675.
[2]蔣守花,賀春林.基于RFID技術的室內定位算法優化方法研究[J].信息技術,2017(4):24-28.
[3]Manzoor F,Menzel K.Indoor localisation for com plex building designs using passive RFID technol ogy[C].General Assembly and Scientific Sympo sium,2011:1-4.
[4]ZHANG D,LU K Z,MAO R.A Precise RFID In door Localization System with Sensor Network As sistance[J].China Communications(The English version),2015,12(4):13-22.
[5]DAO T H,Nguyen Q C,Ngo V D,et al.Indoor Lo calization System Based on Passive RFID Tags[C].International Conference on Intelligent Systems,2015.
[6]Belhadi Z,Fergani L,Fergani B,et al.RFID tag indoor localization by Fingerprinting methods[C].International Conference on Wireless Communica tions,2014:1-5.
[7]沈郭浩,馬永濤,劉開華,等.非視距環境下室內RFID標簽定位算法研究[J].計算機工程與科學,2016,38(3):454-459.
Signal Strength Indicator)衰減非常嚴重,導致基于RSSI測距的landmarc室內定位算法定位誤差較大。針對該問題,本文提出了一種改進的landmarc室內定位算法,在原landmarc室內定位算法的基礎上,引入對數路徑損耗模型,降低環境因素對系統的影響,提高室內定位系統的定位精度。經過仿真實驗證明,融合了對數路徑損耗模型的landmarc室內定位算法較原landmarc室內定位算法在定位精度上提高了近一倍。
鄭卜松【通訊作者】(1992—),男,碩士研究生,主要研究方向:室內定位算法的研究。
朱燕飛(1976—),女,副教授,研究方向:系統建模、智能算法分析及控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
