基于神經網絡的輻射源目標快速識別
2017-12-18 06:22:42徐雄
計算機與數字工程 2017年11期
徐 雄
(中國電子科技集團公司第十研究所 成都 610036)
基于神經網絡的輻射源目標快速識別
徐 雄
(中國電子科技集團公司第十研究所 成都 610036)
隨著軍事科技的快速發展,偽裝、隱蔽、欺騙、干擾等手段和技術大量應用于現代戰場,以致從傳感器獲取的目標特征參數的差異越來越不明顯,原有的目標識別規律性被大量破壞。在目標特征逐漸模糊的發展趨勢下,傳統的“特征提取和選擇、模板建庫、分類器設計、匹配決策”等目標識別技術將很難準確地進行目標識別。論文研究了雷達輻射源識別的基于神經網絡快速實現方法,并與傳統模板匹配方法進行了效果比對,為擺脫傳統目標識別思路的約束,發展智能化的目標識別技術提供了基礎。
雷達輻射源識別;徑向基網絡;模式識別
1 引言
針對戰場目標智能化識別的需求,探索具有自我學習進化、智能推理分析的目標識別新理論與方法。在綜合分析與理解當前流行的各種結構神經網絡的基礎上[1],構建適應中小樣本條件下目標識別的多層神經網絡架構,利用識別樣本數據對其進行逐層訓練,實現戰場目標特征、規律等以神經網絡形式的固化,形成智能化目標識別的基礎,顛覆現有的“特征提取+分類器匹配”的目標識別固有模式,提高目標識別的智能化水平[2]。
神經網絡可以認為是一種通用的模式識別分類器,因此其可能應用的范圍是十分廣泛的。近年來,神經網絡的應用已經深入到各個領域,例如模式識別、模糊控制、預測等。在模式識別領域,其獨有的自組織、自學習和超強的容錯能力使許多復雜的、難以用數學公式描述的問題迎刃而解,并顯示了快速反應、準確應答的優越性能。特別適合用于軍事領域中存儲容量大,執行速度快的場合。在雷達對抗偵察領域中,要求對雷達脈沖進行快速處理和分類,當信號密度高、存在大量輻射源的雷達環境下,尤其如此。
徑向基函數神經網絡(Radial Basis Function,RBF)起源于數值分析中的多變量插值的徑向基函數方法,具有任意精度的泛函逼近能力和最優泛函逼近特性,而且具有較快的收斂速度,不會陷入無局部極小點。本文將徑向基函數神經網絡引入目標識別,設計了一個基于徑向基函數的雷達輻射源目標識別系統[3]。
2 RBF網絡分析原理
RBF網絡是一種有導師的三層構成的前向網絡:第一層為輸入層,節點個數等于輸入的維度;第二層為隱藏層,結點個數視問題的復雜度而定;第三層為輸出層,節點個數等于輸出數據的維度[4]。它最重要的特點是中間隱藏層是非線性的,采用徑向基函數作為基函數,輸出層是線性的。隱藏層神經元的基函數只對輸入刺激起局部反應,即只有當輸入落在輸入空間的一個局部區域時,基函數才產生一個重要的非零響應,而在其他情況下基函數輸出很小(可近似為零)[5]。網絡結構如圖1所示

圖1 RBF網絡結構
徑向基函數記為 y=φ(‖ x-c‖)。 φ 是隱藏層神經元的基函數,目前用的比較多的是高斯分布函數。其中X=(x1,x2,…,xn)是輸入層的輸入向量;W=(w1,w2,…,wn)是該隱藏層神經元的中心向量(每個隱藏層神經元的中心向量存儲在其與輸入層各神經元之間的連接權中),c代表半徑,是一個固定的值,這樣就把多元函數變成了一元函數。‖…‖是指歐幾里得范數,表示n維空間中向量之間的距離[6~7]。
RBF網絡每個輸出層節點的輸出為其與各隱藏層神經元輸出y的加權求和。按高斯分布的函數的定義,隱藏層神經元的輸出y與輸入向量X的函數關系應服從正態分布,即當X與中心向量W的距離很短時,y接近最大值;反之y減小。如X與W的距離超過寬度c(即遠離中心)時,輸出y可近似為零,相當于對輸出層沒有貢獻。這就實現了局部感知[8]。
不難看出,當RBF網絡用作向量分類器時,輸入層神經元個數由向量空間的維數決定,隱藏層神經元個數由模式類別數決定,每個隱藏層神經元的中心向量(與輸入層各神經元之間的連接權)都代表一種模式類別。輸入向量與哪個隱藏層神經元的中心向量距離近,哪個隱藏層神經元的基函數輸出就大,相應的模式類別對輸出層的貢獻就大,與哪個隱藏層神經元的中心向量距離遠,哪個隱藏層神經元的基函數輸出就小,甚至不激活,輸出為零,相應的模式類別當然就不會影響RBF網絡的輸出[9]。向量和模式類別的分類由此完成。
RBF網絡結構較簡單,但網絡權值的訓練方法要復雜些。通常分為下面兩個訓練步驟:
1)隱藏層和輸入層之間的權值采用無導師聚類方法訓練,最常用的是KNN法(K-Nearest-Neighbor)。基本方法是先設定訓練樣本的一個子集,再用模式分類算法把子集中的樣本歸類,然后按順序處理子集外的訓練樣本:對任一樣本X,找出K個與X距離最近的向量,計算這K個向量分別屬于N個模式種類的數目,哪個模式種類包含的最近向量最多,X就屬于哪個模式種類[10]。
將輸入的訓練樣本聚類后,每個模式種類中所有樣本向量的平均值就代表該隱藏層神經元和輸入層之間的權值,而所有樣本向量與中心向量的平方差的平均值就代表寬度。這樣就做出了各個隱藏層神經元的全部參數。因為這種方法只要求輸入訓練樣本就可以進行分類,無須知道訓練樣本的理想輸出,因此被稱為無導師方法。
2)輸出層和隱藏層之間的權值采用有導師聚類方法訓練。簡便實用的一種辦法是:在確定隱藏層和輸入層之間的權值之后,把訓練樣本向量和其理想輸出代入RBF網絡,從而推出各個輸出層神經元和隱藏層之間的權值。
可以看出,需要分類的模式類別數的增加總可以通過不斷增加三層RBF網絡隱藏層神經元數來實現,含義十分直觀。由于其學習過程分為兩步,且每一步的學習算法都十分有效,所以它的學習速度很快[11]。
零指令集計算(Zero Instruction Set Computer,ZISC)是IBM實驗室的一項創新性科研成果,它采用數字電路技術實現了RBF神經網絡及KNN學習算法的集成電路芯片。這種神經網絡芯片不需要操作系統和編程語言,主要的工作就是訓練它和讓它學習。因此用它開發面向消費類的模式識別產品是一種簡單且實用可行的方法,可以大大地縮短研發周期。本文利用基于ZISC這種商業芯片的模式識別系統神經網絡硬件平臺。
本文車型識別研究使用EZB 624 PCI神經網絡卡,其中有8個ZISC78芯片,總容量624個神經元。該神經網絡卡還具有自己的內存和現場可編程門陣列(FPGA)[12]。
3 EZB624神經網絡板卡工作原理
EZB624神經網絡板卡是基于ZISC芯片設計開發的,其訓練過程的工作原理為[13]:
1)每一個輸入樣本向量被看作為一個數據原型(相當于類中心),該原型有一個作用域。
2)當第二個同類的輸入樣本與第一個輸入樣本的距離小于第一個輸入樣本的作用域大小(即第二個輸入樣本在第一個輸入樣本的作用域內)時,第二個輸入樣本對網絡就沒有影響;否則,第二個輸入樣本就作為一個新的原型被網絡記憶。
3)如果后輸入的訓練樣本的類別與前面輸入的樣本類別不同,則后輸入的訓練樣本的作用域將會影響前面類的樣本的作用域。
4)當利用所有訓練樣本對神經網絡反復訓練,則通過上面幾種的相互作用,神經網絡會最終形成一個穩定的、趨于訓練樣本分布的識別模型。

圖2 特征空間映射比較
圖2 為對于兩類數據的分布用不同的方法來分類的情況。這兩類數據分布是線性不可分的,因此,利用線型分類器是無法完全分開這兩個類分布的,如圖2(a)和(b)。神經網絡可以進行非線性分類,例如BP網絡是通過學習建立非線性函數來進行分類的,參數設置比較復雜,并且它不能對新類進行判斷。而EZB624神經網絡是徑向基神經網絡的硬件實現,它是利用徑向基函數在訓練樣本周圍確定小的區域(由于其距離度量通常采用街道距離,因此這里的小區域表現為菱形),然后,利用若干個小的菱形區域來逼近訓練樣本集合的分布區域,從而達到建立識別模型的目的,如圖2(c)所示。
4 數據測試
雷達輻射源特征由載頻(RF)、脈沖重復頻率(PRF)、脈沖寬度(PW)3個特征參數構成[14]。從已知雷達數據庫中提取6種型號雷達類型,每類各取4000個。表1給出的是已知樣本的經處理后的特征參數。
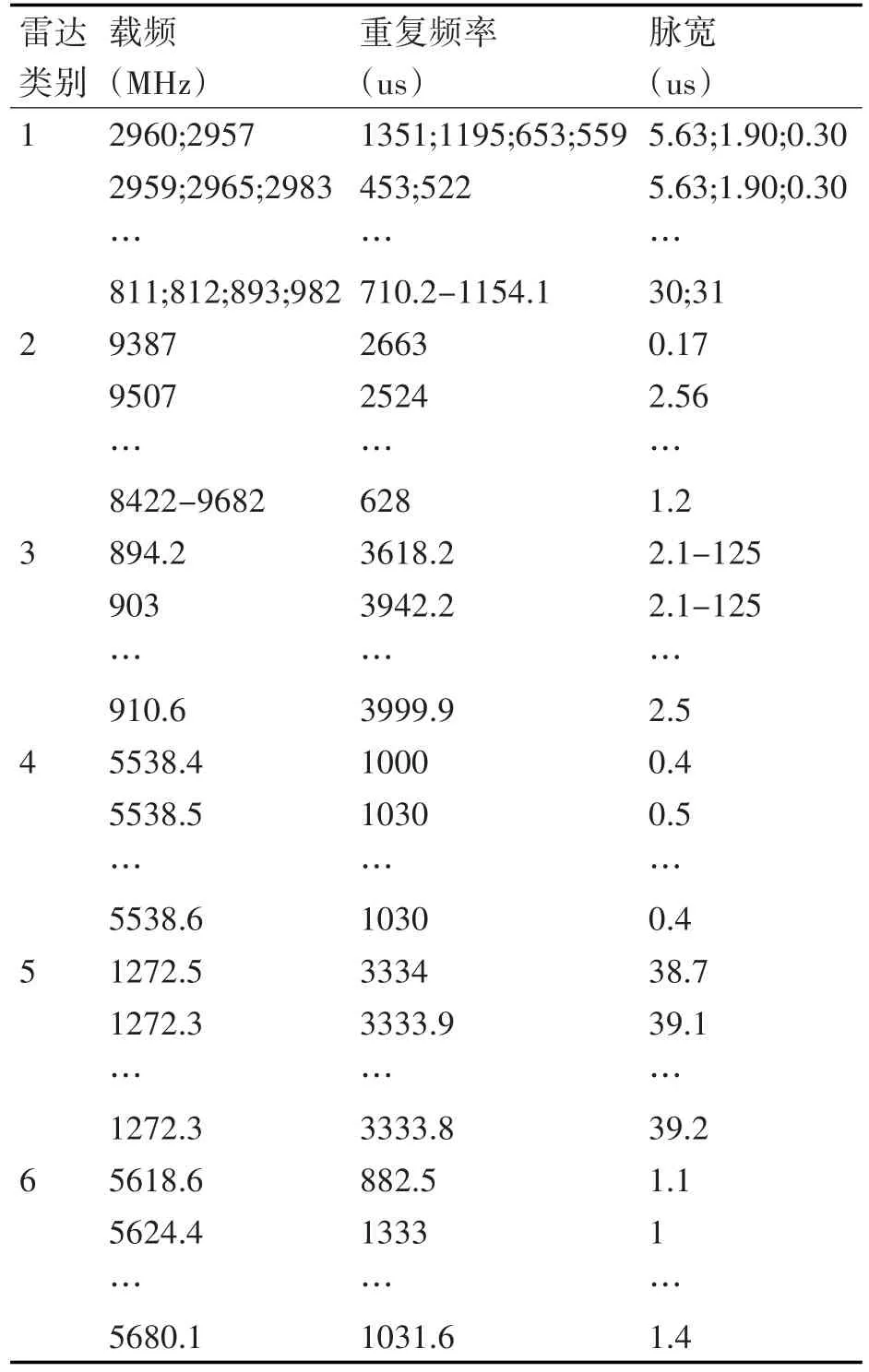
表1 已知雷達信號樣本模式
然后把表1的數據加上高斯白噪聲后,每類雷達生成10000個數據樣本,即共60000個數據作為測試和驗證樣本。其中每類數據劃分為訓練數據7000,測試樣本3000。訓練跟測試流程如圖3所示[15]:
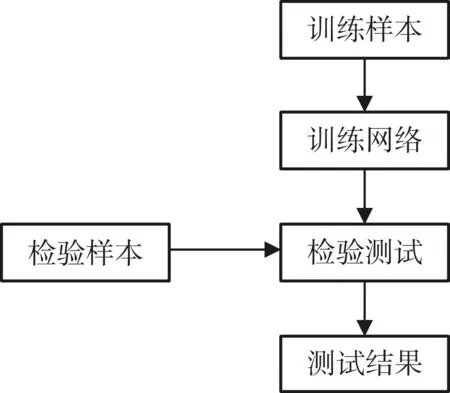
圖3 訓練測試流程
基于EZB624的雷達輻射源目標識別方法運行過程如圖4所示,訓練迭代了10輪次,訓練結果正確率穩定在了93.33%。
為了驗證本文基于神經網絡輻射源目標識別的有效性,從速度和效果兩個方面對比傳統基于模板的識別方法。通過模板匹配過程界面如圖5所示。
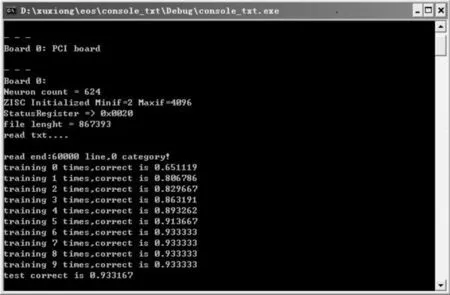
圖4 基于EZB624的雷達輻射源目標識別方法運行過程
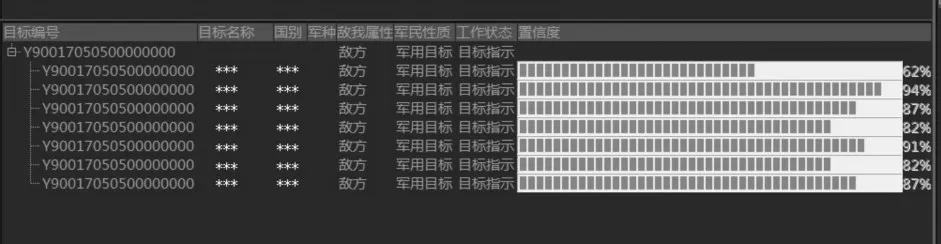
圖5 基于模板匹配識別方法運行過程
傳統數據庫查詢給出結果通用做法為給定閾值(如60%),列出符合條件目標及其對應的置信度,最后還是依賴人來判定。為對比測試,取置信度最大結果做統計。對比結果如下表2所示。在效果差不多的情況下,速度提高了一個數量級。
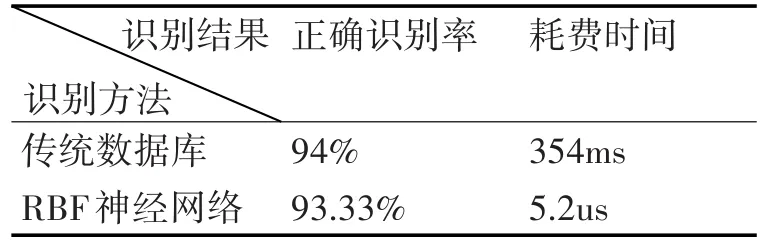
表2 識別結果對比
5 結語
EZB神經網絡是徑向基神經網絡的硬件實現形式,不僅具有神經網絡的并行處理特點,還具有處理速度快、可擴展能力強的特點,對于模式識別、圖像處理等領域來說,是一個比較實用的開發工具。
[1]蔣宗禮.人工神經網絡導論[M].北京:高等教育出版社,2013.JIANG Zongli.Introduction to Artificial Neural Networks[M].Beijing:Higher Education Press,2013.
[2]張立明.人工神經網絡的模型及其應用[M].上海:復旦大學出版社,1992.ZHANG Liming.The Artificial Neural Network Model is Extremely applied[M].Fudan university press,1992.
[3]莊釗文,王雪松,等.雷達目標識別[M].北京:高等教育出版社,2015.ZHUANG Zhaowen,WANG Xuesong.Radar Target identification[M].Beijing:Higher Education Press,2015.
[4]朱樹先,張仁杰.RBF網絡和RBF核支持向量機比較研究[J].計算機仿真,2009,26(5):183-189.ZHU Shuxian,ZHANG Renjie.A Comparison of RBF Neural Network with RBF Support Vector Machines[J].Computer Simulation,2009,26(5):183-189.
[5]張鈴.基于核函數的SVM機與三層前向神經網絡的關系[J].計算機學報,2002,25(7):696-700.ZHANG Ling.The Relationship Between Kernel Functions Based SVM and Three-Layer Feedforward Neural Networks[J].Chinese Journal of Computers,2002,25(7):696-700.
[6]張鈴.支持向量機理論與基于規劃的神經網絡學習算法[J].計算機學報,2001,24(2):113-118.ZHANG Ling.The Theory of SVM and Programming Based Learning Algorithms in Neural Networks[J].Chinese Journal of Computers,2001,24(2):113-118.
[7]劉硯菊,寇國豪,宋建輝.基于RBF神經網絡的空中目標識別技術[J].火力與指揮控制,2015,40(8):9-13.LIU Yanju,KOU Guohao,SONG Jianhui.Target Recognition Based on RBF Neural Network[J].Fire Control&Command Control,2015,40(8):9-13.
[8]周浩,韋道知,金鳳杰.RBF神經網絡在目標識別中的應用研究[J].彈箭與制導學報,2008,27(5):215-216.ZHOU Hao,WEI Daozhi,JIN Fengjie.The Study on Target Recognition Based on RBF Neural Network[J].Journal of Projectiles Rockets Missiles and Guidance,2008,27(5):215-216.
[9]關欣,郭強,張政超,等.基于核函數支持向量機的雷達輻射源識別[J].彈箭與制導學報,2011,31(4):188-191.GUAN Xin,GUO Qiang,ZHANG Zhengchao,et al.Radar Emitter Signal Recognition Based on Kernel Function SVN[J].Journal of Projectiles RocketsMissiles and Guidance,2011,31(4):188-191.
[10]伍波,譚營.神經網絡在雷達輻射源識別中的應用研究[J].航天電子對抗,2001(5):12-14.WU Bo,TAN Ying.Research on Radar Radiating-source Recognizing based on neural networks[J].Aerospace Electronic Warfare,2001(5):12-14.
[11]丁迎迎,楊永健,沈發江.RBF神經網絡在水下目標識別中的應用研究[J].海戰場電子信息技術學術年會論文集,2011(9):62-64.DING Yingying,YANG Yongjian,SHEN Fajiang.Research on Underwater target identification based on RBF[J].Seminar on electronic information technology of naval warfare field,2011(9):62-64.
[12]陳曼.基于神經網絡ZISC的模式識別系統[J].單片機與嵌入式系統應用,2003(1):19-26.CHEN Man.Pattern Recognition System based on neural networks[J].Microcontrollers&Embedded Systems,2003(1):19-26.
[13]袁愛龍.基于視頻的汽車車型識別研究[D].成都:電子科技大學碩士學位論文,2013.YUAN Ailong.The Research of Vehicle Type Recognition Based on Video Sequence[D].Chengdu:University of Electronic Science and Technology of China,2013.
[14]劉鋼,吳智勇,李圣怡,等.基于實時預報的艦載火控穩定跟蹤控制技術[J].火力與指揮控制,2005,30(2):8-12.LIU Gang,WU Zhiyong,LI Shengyi,et al.Study on Stabilised Tracking Control Technique Based on Real-time Prediction for Ship borne Fire Control[J].Fire Control and Command Control,2005,30(2):8-12.
[15]劉慶云,王根弟,朱偉強.雷達輻射源信號特征參量分析[J].航天電子對抗,2008,24(4):21-24.LIU Qingyun,WANG Gendi,ZHU Weiqiang.Analysis of characteristic parameters of radar pulses[J].Aerospace Electronic Warfare,2008,24(4):21-24.
Radar Radiating-source Recognizing Based on Neural Networks
XU Xiong
(China Electronics Technology Group Corporation No.10 Research Institute,Chengdu 610036)
With the rapid development of military technology,techniques such as disguise,hidden,deception,interference,are applied to the modern battlefield,so the differences in the target feature parameters obtained from the sensor are getting smaller and smaller,the original target recognition regularity is heavily damaged.In the trend of the target to be blurred,traditional“template match”recognition techniques will be difficult to target accurately.This paper studies radar radiation-source recognizing based on neural networks,compared with the“template match”,it provides the basis of getting rid of traditional identifying ideas and the development of intelligent target recognition technology.
radar radiation-source recognizing,radial basis function(RBF),pattern recognition
TP391
10.3969/j.issn.1672-9722.2017.11.010
Class Number TP391
2017年5月9日,
2017年6月23日
國家自然科學基金項目(編號:61671167)資助。
徐雄,男,碩士,工程師,研究方向:目標識別技術、信息融合。
