4YZP-4X自走式玉米收獲機的設計研究
2017-12-16 09:05:09崔中凱邸志峰魏訓成張志起
農機化研究 2017年7期
關鍵詞:系統
崔中凱,邸志峰,魏訓成,姜 偉,張志起
(山東省農業機械科學研究院,山東 濟南 250100)
?
4YZP-4X自走式玉米收獲機的設計研究
崔中凱,邸志峰,魏訓成,姜 偉,張志起
(山東省農業機械科學研究院,山東 濟南 250100)
我國玉米收獲機普遍存在可靠性低、適應性差、可操控性低及自動化水平落后等問題,不能滿足玉米收獲季節性強、勞動強度高、作業量大等實際作業需求。液壓系統具有布置緊湊、操作方便、故障率低等優點,非常適合應用于結構形態多變、工作條件惡劣的農業機械。為此,結合目前玉米生產現狀和現有技術裝備,設計了一種靜液壓驅動自走式玉米收獲機,可一次性完成摘穗、輸送、剝皮和秸稈切碎還田等作業。田間性能試驗結果表明:該機操控簡單、可靠性高,主要性能指標均達到或優于國家標準。
玉米收獲機;靜液壓驅動;自走式;輥式割臺;前切碎
0 引言
玉米是我國第一大糧食作物,2015年全國玉米種植面積達3 811.66萬hm2,年產量22 458萬t,分別占糧食種植面積的33.63%和總產量的36.14%[1],為保障國家糧食安全和連年增產做出了重要貢獻。收獲是玉米種植過程的最后一個環節,也是最關鍵的環節[2]。玉米收獲季節性強、勞動強度高、作業量大,發展玉米收獲作業機械化對于提高作業效率、減輕生產強度、確保玉米適時收獲和小麥及時播種,實現玉米、小麥雙豐收具有重大意義[3]。近幾年來,我國玉米收獲機在技術和產品開發方面有了長足的進步,有不少機型已進入實際使用階段,但總體水平低的狀況還沒有得到根本改變。現有玉米收獲機普遍存在可靠性低、適應性差、可操控性低及智能化水平落后等問題,不能滿足實際生產需求[4]。玉米收獲環節機械化發展緩慢,成為玉米生產機械化乃至糧食生產機械化中最突出、最薄弱的環節。
液壓系統具有布置緊湊、操作方便、故障率低等優點,非常適合應用于結構形態多變、工作條件惡劣的農業機械[5]。隨著購買力的提高,農民正從追求價格低向追求性能好、操作舒適方向發展,為農機應用液壓技術創造了有利條件。液壓技術的應用將使我國農機質量和技術含量得到顯著提高,對縮小與先進國家的技術差距、鞏固國內市場、減輕勞動強度和提高農民生活質量影響顯著[6]。
為此,結合玉米生產現狀和現有技術裝備,設計了一種靜液壓驅動自走式玉米收獲機,并對其整機性能進行了考核。考核結果表明:該玉米收獲機摘穗率高,剝皮效果好,秸稈還田均勻,留茬高度低,液壓行走系統操控簡單、可靠性高,能夠適應玉米收獲需求。
1 總體結構及工作原理
1.1 總體結構
4YZP-4X自走式玉米收獲機主要由機架、割臺、前切碎、升運器、剝皮機、果穗箱、還田機、驅動橋、發動機、轉向橋、液壓系統及自動化系統等組成,可一次性完成摘穗、輸送、剝皮和秸稈切碎還田等作業流程。4YZP-4X自走式玉米收獲機的主要參數如表1所示,整機結構如圖1所示。
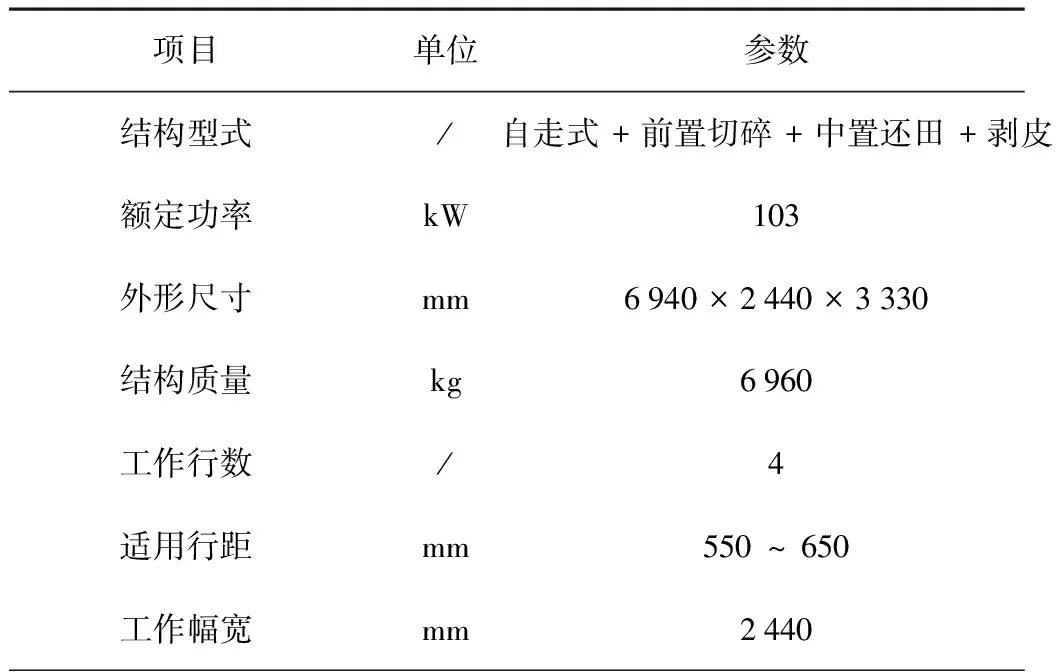
表1 整機參數

續表1
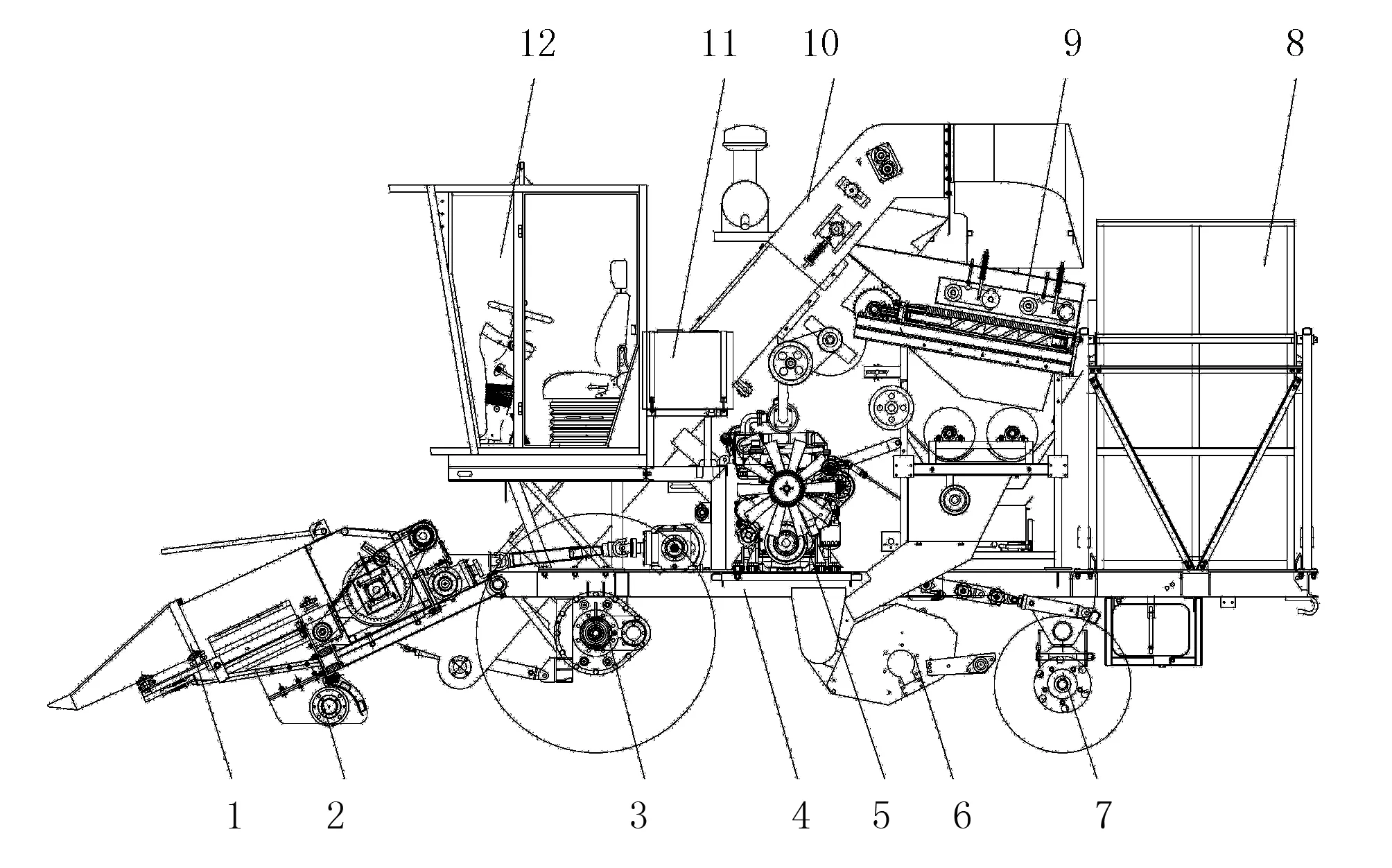
1.割臺 2.前切碎 3.驅動橋 4.機架 5.發動機 6.還田機 7.轉向橋 8.果穗箱 9.剝皮機 10.升運器 11.液壓油箱 12.駕駛室
1.2 工作原理
4YZP-4X自走式玉米收獲機作業時,割臺前端的分禾器首先把植株引向割臺摘穗道,在摘穗輥的擠壓作用下將果穗摘下,莖稈則被摘穗輥抽拉至割臺下部,經前切碎刀切段及還田機粉碎后拋灑至田間;摘下的果穗在割臺輸送鏈的作用下輸送至割臺后端的攪龍中,攪龍將果穗由割臺兩側輸送至升運器,升運器將果穗輸送至剝皮機,果穗經剝皮后落入果穗箱中收集起來[7];剝下的苞葉經剝皮機排雜攪龍輸送至剝皮機左側的苞葉切碎器中進行切碎,切碎后的苞葉經導流槽落到還田機前側進行二次切碎,苞葉中夾帶的大部分籽粒則經位于排雜攪龍下方的篩網篩落后集中到籽粒收集箱中被收集起來。
2 主要部件的研制
2.1 割臺裝置
割臺裝置是玉米聯合收獲機的核心部件,其技術性能優劣,直接影響整機作業質量[8]。常見的玉米割臺主要有輥式和板式兩種:輥式割臺功率消耗小,對不同形態莖稈的適應性強,摘落的果穗含雜少,并具有一定的剝皮功能,缺點是玉米尾部掉粒較多;板式割臺工作可靠,啃穗率及籽粒破碎率低,但果穗帶苞葉較多,且莖稈拉斷率較高。考慮整機適用對象和區域,本文采用輥式割臺結構,并對其機械結構、參數選擇等方面進行了優化。
輥式割臺摘穗機構是一對相對回轉的摘穗輥,與撥禾鏈、輸送鏈、輸送攪龍、傳動箱及機架等一起組成摘穗單元。作業時,隨著機器的前進,分禾器將玉米植株導入撥禾鏈,撥禾鏈將玉米植株引入摘穗輥前段;前段錐體上的螺旋凸棱引導莖稈進入摘穗輥中段的間隙,莖稈在旋轉的摘穗輥間做軸向移動的同時被向下強拉。由于果穗和穗柄的連接力及穗柄與莖稈的連接力較小,果穗被摘穗輥擋住時,果穗與穗柄在連接力較小處被拉斷,從而實現果穗與莖稈的分離。莖稈末梢由摘穗輥后段強制拉出,果穗則由輸送鏈繼續向后輸送。輥式割臺總體結構如圖2所示。

1.撥禾鏈 2.摘穗輥 3.輸送鏈 4.分動箱 5.輸送攪龍 6.機架
傳統摘穗輥長度一般為850~900mm,轉速在1 000r/min左右,摘穗主要集中在前半部分;果穗在向后輸送過程中,摘穗輥后段上的摘穗鉤容易啃玉米穗,造成籽粒損失。因此,在設計輥式割臺時,將摘穗輥的長度設計為650mm,為保證較高的摘穗率,將轉速提高至1 200r/min,并在摘穗輥后段加裝防護板,避免啃粒現象。這樣既能有效減小割臺籽粒損失,也能縮短整車長度,使整機更加緊湊。
2.2 剝皮機
剝皮機主要由機架、壓送器、剝皮輥、排雜攪龍、苞葉切碎器及籽粒回收箱等部件組成。作業時,果穗由升運器運送至剝皮機喂入口,由分流板將果穗導入剝皮輥并使果穗縱向軸線與剝皮輥軸線平行;果穗在壓送器的作用下緊貼在剝皮輥上,由剝皮輥靠摩擦力將果穗苞葉剝下[10];剝完苞葉的果穗由剝皮輥后端落入果穗箱,苞葉則落入剝皮輥下方的排雜攪龍。剝皮機總體結構如圖3所示。

1.導流槽 2.苞葉切碎器 3.籽粒回收箱 4.機架 5.排雜攪龍 6.剝皮輥 7.壓送器
苞葉在排出過程中會夾帶部分玉米籽粒,造成籽粒夾帶損失,因此設計了籽粒回收裝置。苞葉在排雜攪龍的作用下會沿篩網組成的通道先進后出。在此過程中,夾帶的籽粒通過篩網落到下方的籽粒回收箱中,而苞葉則被送入苞葉切碎器,切碎后通過導流槽落到還田機前面進行二次切碎。傳統剝皮輥后端易纏雜草或者苞葉,難以清理,影響工作效率。因此,在剝皮輥后端設計了深槽形的強拉段,可以將滑到剝皮機末端的散落苞葉和雜草等從該間隙中拉出以防堵塞。
3 液壓系統
4YZP-4X自走式玉米收獲機液壓系統由作業系統及靜液壓行走系統兩個子系統組成,作業系統又可分為轉向系統和操縱系統兩個子系統,兩個子系統共用一個液壓油箱和齒輪泵,通過單路穩定分流閥分成兩個子系統。轉向系統用于控制轉向輪的轉向,操縱系統用于控制割臺升降、還田機升降和果穗箱卸糧。4YZP-4X自走式玉米收獲機液壓作業系統原理,如圖4所示。
靜液壓行走系統由1個液壓泵驅動1個液壓馬達,馬達驅動機械式齒輪箱,輔助以補油泵和沖洗閥,以補償內泄露和降低液壓油溫度。靜液壓行走系統使產品結構緊湊、操作方便,行走控制和換向方便,驅動靈活,作業效率高。4YZP-4X自走式玉米收獲機靜液壓行走系統原理,如圖5所示。

1.齒輪泵 2.轉向器 3.轉向油缸 4.割臺油缸 5.還田機油缸 6.割臺油缸 7.多功能閥

1.主泵 2.補油泵 3.油箱 4.散熱器 5.溢流補油閥
4 自動化系統
目前,國外玉米收獲機的研究與生產技術已經成熟,廣泛應用機電一體化和自動化技術,正向舒適性、使用安全性、操作方便性方向發展。2015年,在第一輪樣機的基礎上,對樣機進行了智能化改造,加裝轉速監控、自動對行、割臺仿形、工況監控等智能化設備,提高了整機的安全性和可操作性。自動仿形機構及工況監控系統如圖6、圖7所示。

圖6 自動仿形機構

圖7 主要工作部件實時監測
5 田間試驗
田間試驗旨在測試4YZP-4X自走式玉米收獲機的工作性能,考察機器在正常作業速度下的工作情況。試驗依據GB/T 21961-2008 《玉米收獲機械 試驗方法》進行,試驗指標主要包括總損失率、籽粒破損率、果穗含雜率、苞葉剝凈率、留茬高度及還田秸稈切碎長度合格率等。試驗結果如表2所示。

表2 試驗結果
試驗結果表明:4YZP-4X自走式玉米收獲機各項指標均高于標準要求。
6 結論
1)適當縮短摘穗輥長度,提高摘穗輥轉速并在摘穗輥后段上部加防護板,可以在保證摘穗率的前提下實現較低的啃穗率,減少割臺籽粒損失。
2)前切碎、中還田組合還田方式能有效降低還田機功率消耗,提高行走速度,同時獲得很好的還田效果。
3)靜液壓無級變速行走系統布置靈活,工作可靠,應用到玉米收獲機上可以使產品結構緊湊,行走控制和換向方便,驅動靈活,作業效率高。
[1] 中華人民共和國國家統計局.國家統計局關于2015年糧食產量的公告[EB/OL].[2015-12-08]. http://www.stats.gov.cn/tjsj/zxfb/201512/t20151208_1286449.html.
[2] 耿愛軍,楊建寧,張兆磊,等.國內外玉米收獲機械發展現狀及展望[J].農機化研究,2016,38(4):251-256.
[3] 徐純鵬.淺析玉米收獲機械化技術的發展[J].湖北農機化,2010(6):30.
[4] 郝付平,陳志.國內外玉米收獲機械研究現狀及思考[J].農機化研究,2007(10):206-208.
[5] 曹玉寶.液壓技術在現代農業中的應用現狀和趨勢[J].農機化研究,2008(5):194-196.
[6] 張志起,崔中凱,劉繼元,等.4YX-4型全液壓自走式玉米收獲機液壓系統設計[J].農機化研究,2015,37(12):97-101.
[7] 邸志峰,劉繼元,李青龍,等.4YZP-3型自走式玉米收獲機的設計和研究[J].農機化研究,2015,37(2):128-131.
[8] 李旭,李湘彬.玉米聯合收獲機摘穗裝置比較分析研究[J].農機化研究,2010,32(9):9-11.
[9] 郭春芳,郭金躍,趙秀全.玉米收獲機板式割臺參數分析[J].山西農業大學學報:自然科學版,2011(31):377-380.
[10] 陳寶昌,林君堂,李存斌,等.新型玉米剝皮機的研究設計[J].農機化研究,2010,34(2):88-90.Abstract ID:1003-188X(2017)07-0130-EA
Design and Research of 4YZP-4 Self-propelled Corn Harvester
Cui Zhongkai, Di Zhifeng, Wei Xuncheng, Jiang Wei, Zhang Zhiqi
(ShanDong Academy of Agricultural Machinery Sciences, Jinan 250100, China)
At present our country’s corn harvester generally have problems of low reliability, poor adaptability, low controllability and lack of automation system. It can’t meet requirements of strong seasonality, high labor intensity and large operations of corn harvest. Hydraulic system has advantages of compact arrangement, low failure rate and comfortable to operate, which is very suitable for agricultural machinery.Combined with the current situation and existing technology,this article designs one hydrostatic self-propelled corn harvester.It is mainly composed by frame, header, front cutter, lift conveyer, corn husker, corn collection box, tillage machine, drive axle, engine, steering axle, hydraulic system and automation system. It can complete picking, lifting, peeling and straw chopping at one time. Field performance test results show that this machine is easy to control with high reliability. Main performance indexes reach or exceed national standards.
corn harvester; hydrostatic driving; self-propelled; roller-type header; front cutter
2016-05-07
“十二五”國家科技支撐計劃項目(2013BAD08B01);山東省農機裝備研發創新項目(NJGG201507)
崔中凱(1987-),男,山東鄒平人,工程師,(E-mail)kevin6119@qq.com。
邸志峰(1980-),男,山西原平人,工程師,(E-mail)dzf1125@163.com。
S225.5+1
A
1003-188X(2017)07-0130-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
