計算機模擬下的馬鈴薯機械化挖掘與試驗研究
2017-12-16 07:05:49蘇建華
農(nóng)機化研究 2017年2期
蘇建華,李 磊
(承德石油高等專科學(xué)校 計算機與信息工程系,河北 承德 067000)
?
計算機模擬下的馬鈴薯機械化挖掘與試驗研究
蘇建華,李 磊
(承德石油高等專科學(xué)校 計算機與信息工程系,河北 承德 067000)
針對馬鈴薯機械化挖掘進行試驗研究,應(yīng)用Pro/E進行馬鈴薯機械化挖掘建模,基于Adams軟件進行計算機模擬仿真,設(shè)計中應(yīng)多考慮馬鈴薯機械化挖掘中鏟面碎土的能力。通過試驗研究馬鈴薯機械化挖掘?qū)︸R鈴薯挖掘的影響,可優(yōu)化提升馬鈴薯機械化挖掘工作中的適應(yīng)性、降低傷薯率與損失率,對提升馬鈴薯機械化挖掘質(zhì)量具有重要意義。
馬鈴薯;機械化挖掘;計算機模擬
0 引言
在我國糧食產(chǎn)業(yè)中,馬鈴薯作為小麥、水稻、玉米之后的第四大作物,具有舉足輕重的作用。實現(xiàn)馬鈴薯的機械化挖掘,不僅能夠適應(yīng)我國當前農(nóng)民對于挖掘馬鈴薯的農(nóng)作需求,也可促使提升馬鈴薯挖掘效率,降低生產(chǎn)成本。為此,利用計算機建模結(jié)合機具試驗,對振動式挖掘生產(chǎn)進行了研究,旨在為后續(xù)研究提供參考。
1 實現(xiàn)馬鈴薯機械化挖掘的意義
當前農(nóng)業(yè)生產(chǎn)中,在馬鈴薯收獲的季節(jié),對于面積小的馬鈴薯區(qū)域還在采取手工方式挖掘,不僅挖掘速度慢,還容易導(dǎo)致馬鈴薯破損,影響馬鈴薯的收獲率[1]。雖然我國對于大面積馬鈴薯挖掘采用機械化手段,但由于在馬鈴薯機械化挖掘方面的研究還處于初級階段,并且將國外的馬鈴薯機械化挖掘機直接應(yīng)用與我國的馬鈴薯挖掘中,也會受到地區(qū)、國家差異等因素的限制[2]。我國現(xiàn)有農(nóng)業(yè)生產(chǎn)的機械化設(shè)備中,馬鈴薯機械化聯(lián)合挖掘機,不僅體積大且功耗也高,往往適用進行大面積馬鈴薯種植區(qū)域的挖掘作業(yè),且會由于一些種植區(qū)域的地理條件限制與馬鈴薯的種植模式差異,導(dǎo)致馬鈴薯機械化挖掘機使用優(yōu)勢大大降低。例如,在一些山地及坡地中,應(yīng)用該機械化挖掘機來收獲馬鈴薯,操作難度大。傳統(tǒng)的馬鈴薯機械化挖掘機并不適合進行小地塊的馬鈴薯挖掘作業(yè),使得在我國不能大面積推廣應(yīng)用馬鈴薯機械化挖掘機收獲[3-5]。同時,我國在研制開發(fā)馬鈴薯挖掘機方面缺乏精準的理論指導(dǎo),在設(shè)計研制及應(yīng)用方面與國外一些發(fā)達國家比還有明顯的技術(shù)差距[6]。
2 計算機模擬下設(shè)計馬鈴薯機械化挖掘
2.1 馬鈴薯機械化挖掘的設(shè)計思想
在本研究中,為能夠?qū)崿F(xiàn)對于我國馬鈴薯挖掘機械化目標,可以高效、優(yōu)質(zhì)地進行機械化馬鈴薯挖掘,應(yīng)該確保設(shè)計的馬鈴薯機械化挖掘機,能夠向著機械作業(yè)低功耗、挖掘馬鈴薯低損失及節(jié)約能源的方向來開展設(shè)計。本研究中,將會結(jié)合實際的需要,運用計算機模擬技術(shù),優(yōu)化研制設(shè)計出可以與地面能夠保持較少接觸(規(guī)避機械化挖掘作業(yè)堵塞弊端)、降低地面地形的干擾(杜絕地理因素差異弊端)及提升明薯率的設(shè)備。
2.2 馬鈴薯機械化挖掘設(shè)計依據(jù)
在我國馬鈴薯農(nóng)業(yè)生產(chǎn)中,對于馬鈴薯的種植,一般采取壟作種植的模式,對于不同的種植行間距,單株的馬鈴薯質(zhì)量及產(chǎn)量方面也會存在一定差異(見表 1)。本次計算機模擬馬鈴薯機械化挖掘過程中,已將這些差異考慮在內(nèi)。
由表1可知:不同的行間距也會對單株的馬鈴薯質(zhì)量、產(chǎn)量產(chǎn)生影響。因此,在計算機模擬下的馬鈴薯機械化挖掘機設(shè)計中,應(yīng)該根據(jù)馬鈴薯的塊莖物理機械性能,優(yōu)化設(shè)計馬鈴薯機械化挖掘機設(shè)備[7]。具體就是在設(shè)計中,根據(jù)馬鈴薯的大小,優(yōu)化設(shè)計馬鈴薯機械化挖掘過程中的挖掘深度與寬度,確保能夠在馬鈴薯壟作的切土、松土及碎土的過程之中將馬鈴薯與土壤共同挖起[8-10]。同時,在設(shè)計馬鈴薯機械化挖掘機時進行計算機模擬仿真,還需考慮鏟面在工作時會被草纏住的因素,有效增強鏟面破碎能力,提升馬鈴薯機械化挖掘鏟碎土的性能,確保馬鈴薯機械化挖掘機能夠在實踐中推廣應(yīng)用。
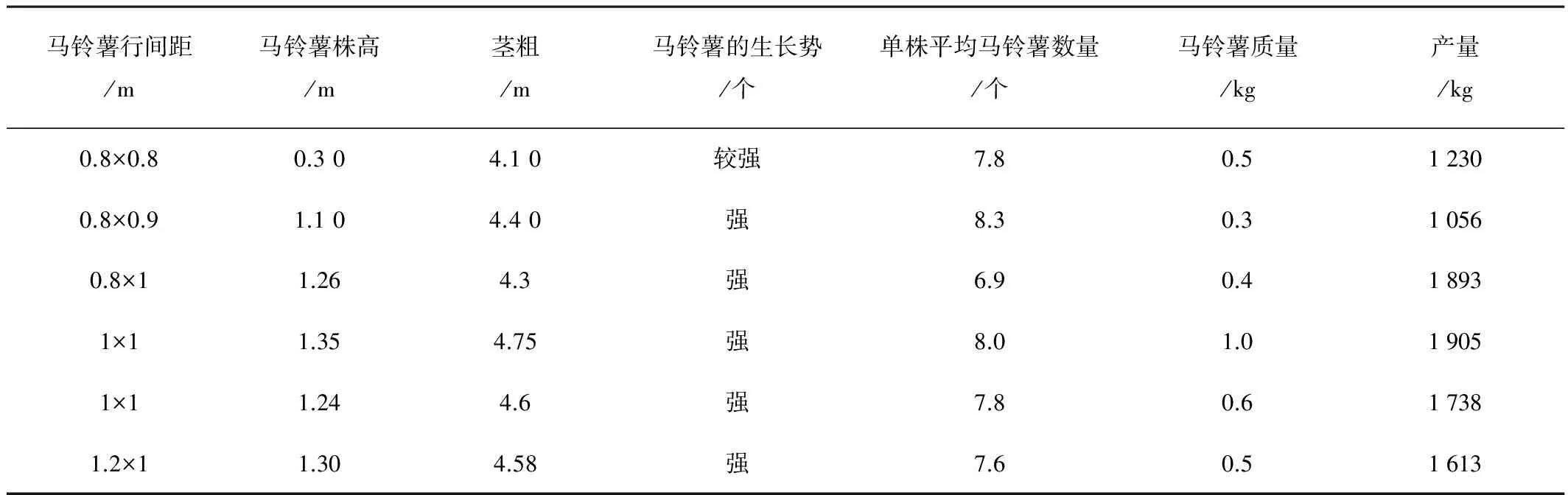
表1 差異數(shù)據(jù)
2.3 影響挖掘阻力的主要參數(shù)分析
本研究中,重要解決不同地區(qū)土壤特性差異性大,以及馬鈴薯挖掘機工作時適應(yīng)性差、碎土能力低、明薯率低、傷薯率和損失率高等問題。基于Pro/E軟件進行了強適應(yīng)性小型馬鈴薯收獲機建模,使用Adams軟件進行了仿真研究,建立了工作阻力模型。通過測試挖掘機工作時挖掘鏟的運動過程,入土角度調(diào)節(jié)模塊如圖 1所示 。
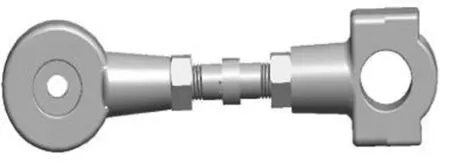
圖1 挖掘鏟的入土角度調(diào)節(jié)模塊
由圖1可以看出:挖掘鏟能夠?qū)⑶岸瞬糠种苯雍婉R鈴薯機械化挖掘機的偏心輪軸進行聯(lián)接,在后端可以同挖掘鏟的側(cè)板連接軸進行聯(lián)接 ,且在前后部分可以通過螺桿進行聯(lián)接。挖掘鏟設(shè)計中的幾何關(guān)系如圖2所示。
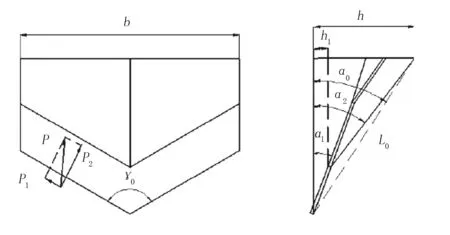
圖2 挖掘鏟設(shè)計
電子計算機技術(shù)的快速進步使得挖掘機的控制系統(tǒng)得到了先進技術(shù)的支持,促使液壓挖掘機的研究重點正逐步向智能化控制系統(tǒng)方向轉(zhuǎn)移。最大挖掘力為挖掘鏟油缸設(shè)計的依據(jù),挖掘鏟油缸作用力為
(1)
式中l(wèi)1—挖掘鏟油缸作用力對搖臂點的力臂(此位置為搖臂長度);
lc—F1max對挖掘鏟與連桿點C的力臂。
(2)

F2=0.2×F1max=27kN
(3)
2.4 馬鈴薯機械化挖掘機設(shè)計
基于計算機模擬,對挖掘鏟進行柵格化,并進行有限元靜力學(xué)分析。改善馬鈴薯機械化挖掘部件的工作質(zhì)量,能夠確保在進行馬鈴薯機械化挖掘工作時減小挖掘機的工作阻力,避免挖掘鏟在受到土壤阻力作用產(chǎn)生應(yīng)力變形[11-13]。在馬鈴薯機械化挖掘機的挖掘鏟兩側(cè),安裝上切土的圓盤,可以防止掘起馬鈴薯過程中漏著;并且在切土圓盤入土的部分,設(shè)置300°刃角,可以輕松切開馬鈴薯壟。本馬鈴薯機械化挖掘機設(shè)計結(jié)構(gòu)如圖3所示。
由圖3可知:馬鈴薯機械化挖掘機中,可改變挖掘鏟入土角,但不能始終固定入土。該機安裝了可調(diào)節(jié)的后輪,對挖掘機整個機架高度都有調(diào)節(jié)作用,對不同壟高種植的馬鈴薯都有很好的適應(yīng)性;調(diào)節(jié)絲桿可調(diào)節(jié)擺動篩底面與地面的角度,使做往復(fù)運動擺動的篩子更容易將土粒抖落,不易在篩網(wǎng)面形成土粒的堆積,減小了牽引阻力。
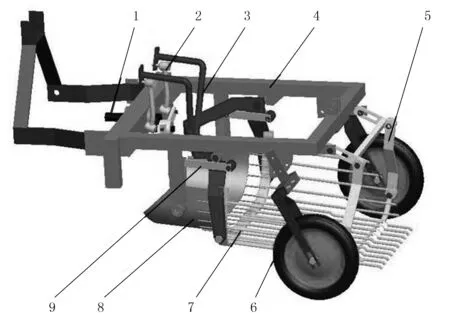
1.導(dǎo)向 2.曲軸 3.手柄 4.固定裝置 5.連桿 6.前輪 7.凸緣 8.刀片 9.支架
3 試驗研究
3.1 試驗條件
本次馬鈴薯機械化挖掘的試驗中,地點選擇在A地的某陽光農(nóng)場進行,時間期限是 2015 年 11 月 10 日-12 月12日,試驗期間的溫度保持在( 17 ±2.3)℃,試驗區(qū)域的土壤類型是紅壤土;選擇的試驗地面積0.24hm2,馬鈴薯壟高20cm,株距18cm,壟寬50cm,馬鈴薯的結(jié)薯深度 10~20cm。
3.2 試驗方法
試驗中,結(jié)合馬鈴薯機械化挖掘機特點及性能,根據(jù) GB5262標準中農(nóng)業(yè)機械試驗條件測定方法的規(guī)定,進行馬鈴薯機械化挖掘試驗。
3.3 試驗指標測定
在基于計算機模擬優(yōu)化設(shè)計馬鈴薯機械化挖掘機試驗研究中,可以測定馬鈴薯的明薯率、傷薯率、挖凈率及埋薯率指標。
3.4 試驗結(jié)果分析
通過本試驗,得出馬鈴薯機械化挖掘機的結(jié)果,如表3所示。
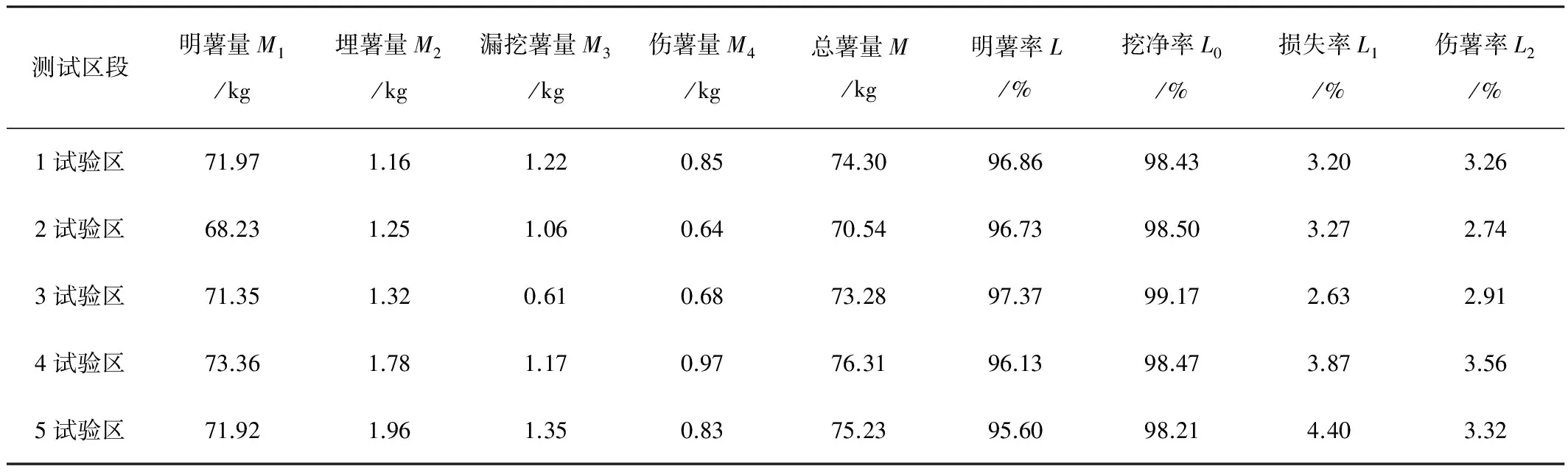
表3 馬鈴薯機械化挖掘性能結(jié)果
4 結(jié)論
利用Pro/E軟件對強適應(yīng)性馬鈴薯機械化挖掘機建模,在Adams軟件中進行仿真研究,分析了動鏟對馬鈴薯挖掘性能的影響,得知振動式挖掘鏟具有減阻、防堵、適應(yīng)性強及可靠性高等優(yōu)點。
綜上所述,在計算機模擬下優(yōu)化設(shè)計馬鈴薯挖掘機,并進行試驗驗證,證實該馬鈴薯挖掘機在計算機模擬下能夠勝任挖掘馬鈴薯的工作,不僅能夠解決傳統(tǒng)馬鈴薯挖掘機工作時適應(yīng)性差、碎土能力低、明薯率低、傷薯率和損失率高等問題,也可以提升馬鈴薯的挖掘效率。
[1] 江立凱,馬旭,武濤,等.南方冬種馬鈴薯收獲機的應(yīng)用現(xiàn)狀與研究展望[J].農(nóng)機化研究,2016,38(7):263-268.
[2] 吳金娥,呂金慶,楊穎,等.基于 ADAMS 的馬鈴薯挖掘機運動學(xué)仿真[J].農(nóng)機化研究,2016,38(2):31-34.
[3] 鄧偉剛,王春光,孫宏,等.馬鈴薯挖掘機挖掘鏟力學(xué)模型構(gòu)建[J].農(nóng)機化研究,2014,36(1):84-86.
[4] 吳建民,李輝,孫偉,等.撥指輪式馬鈴薯挖掘機試驗[J].農(nóng)業(yè)工程學(xué)報,2011,27(7):173-177.
[5] 呂金慶,田忠恩,楊穎,等.4U2A型雙行馬鈴薯挖掘機的設(shè)計與試驗[J].農(nóng)業(yè)工程學(xué)報,2015(6):17-24.
[6] 呂金慶,田忠恩,吳金娥,等.4U1Z型振動式馬鈴薯挖掘機的設(shè)計與試驗[J].農(nóng)業(yè)工程學(xué)報,2015(12):39-47.
[7] 高海明.小型馬鈴薯挖掘機的設(shè)計與試驗研究[D].烏魯木齊:新疆農(nóng)業(yè)大學(xué),2014.
[8] 張華,吳建民,孫偉,等.4UM -640型振動式馬鈴薯挖掘機的設(shè)計與試驗[J].干旱地區(qū)農(nóng)業(yè)研究,2014(2):264-268.
[9] 李濤,康璟,孫偉,等.4U-1000型馬鈴薯挖掘機的設(shè)計與試驗[J].甘肅農(nóng)業(yè)大學(xué)學(xué)報,2013,48(3):151-155.
[10] 戴飛,楊杰,趙武云,等.振動式階梯鏟狀馬鈴薯挖掘機作業(yè)性能試驗[J].干旱地區(qū)農(nóng)業(yè)研究,2014(3):263-267.
[11] 吳建民,李輝,孫偉,等.撥指輪式馬鈴薯挖掘機設(shè)計與試驗[J] .農(nóng)業(yè)機械學(xué)報,2010, 41(12):76-79.
[12] 劉寶,張東興,李晶.MZPH-820 型單行馬鈴薯收獲機設(shè)計[J] .農(nóng)業(yè)機械學(xué)報, 2009, 40(5):81-86.
[13] 文學(xué)洙, 廉哲滿.振動式挖掘機的設(shè)計與試驗[J].農(nóng)業(yè)機械學(xué)報, 2006,37(10):77-82.
Potato Mechanization Mining and Experimental Research on Computer Simulation
Su Jianhua , Li Lei
(Chengde Petroleum College Department of Computer & Information Engineering,Chengde 067000, China)
According to the mining mechanization of potato were studied, using Pro/E software of potato machinery mining modeling.Based on ADAMS software for computer simulation, in the design of multi consider shovel surface soil crushing capacity, by introducing the soil compression and damage theory, the establishment of measure broken soil properties of the mathematical model, through test and study of potato mechanization mining for potato digging effect, so as to optimize the promotion of potato mechanized mining work adaptability, reduce the rate of tuber damage and loss rate, enhance potato mechanization mining quality, play a positive impact.
potato; mechanized mining; computer simulation
2016-03-30
承德市科學(xué)技術(shù)研究與發(fā)展計劃項目(201422104)
蘇建華(1979-),男,陜西漢中人,講師,碩士,(E-mail)sujianhua079830@163.com。
李 磊(1978-),男,河北承德人,講師,碩士。
S225.7+1
A
1003-188X(2017)02-0167-04
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:54
科技傳播(2019年22期)2020-01-14 03:06:34
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
消費導(dǎo)刊(2017年20期)2018-01-03 06:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
