牽引型分段式花生收獲機的研制
2017-12-16 02:48:55陳海需衡耀付楊瑩瑩劉大華
農機化研究 2017年4期
陳海需,衡耀付,姜 俊,楊瑩瑩,劉大華
(1.黃淮學院 機電工程學院,河南 駐馬店 463000;2.駐馬店市農業科學院,河南 駐馬店 463000)
?
牽引型分段式花生收獲機的研制
陳海需1,衡耀付1,姜 俊2,楊瑩瑩1,劉大華1
(1.黃淮學院 機電工程學院,河南 駐馬店 463000;2.駐馬店市農業科學院,河南 駐馬店 463000)
結合河南省花生主產區的種植模式和農用拖拉機保有量大的特點,為解決花生挖掘后人工撿拾秧果勞動強度大、成產成本高的問題,設計了一種與拖拉機動力配套使用的牽引型分段式花生收獲機。該花生收獲機主要由傳動變速裝置、拾撿輸送裝置、攪龍裝置、清選分離裝置、集果裝置,以及相關輔助裝置等部件組成。在分段收獲的基礎上,設計了自動拾撿裝置,提升了抓秧能力;創新設計了螺旋圓弧攪龍,振動篩與吸風機組成的清選分離系統,清選效果較好,最大限度地避免了農機作業中粉塵飛揚。田間試驗表明:該機作業性能良好,撿拾率達到98.8%,損失率為2.8%,生產率達到1 017kg/h,符合國家花生收獲機作業質量標準(NY/7502-7502),滿足實際生產要求。
牽引型;分段收獲;自動拾撿;花生收獲機
0 引言
河南省作為農業大省,又是花生種植面積最大的省份,近3年年均花生種植面積達120萬hm2,產量460萬t。而長期以來,大多數地區花生收獲仍是傳統的人工收獲模式[1],雖然我國部分地區引進了國外先進的花生收獲機械[2],但不適合種植區域廣、種植方式多樣化等中國國情,也不能滿足花生產業日益發展對農業機械化水平的需要。
近年來,我國花生種植主要集中在河南、山東、河北及安徽等地區,大都采用一壟兩行的種植模式,方便收獲,每行之間為保證空間密度采用交叉錯蔸播種[3-4]。花生機械化收獲主要有兩種模式:一是自走式聯合收獲模式,一臺設備完成從花生挖掘到精果輸出的所有作業過程,屬于濕果摘果,適合我國南方地區;二是機械化分段收獲模式,適合氣候較為干旱的北方地區。花生挖掘后在地表呈有序鋪放狀態,經過晾曬,再進行機械化撿拾摘果,可有效避免莢果霉變,提高花生產量,同時為下一步撿拾摘果作業提供了有利的條件。
目前,國內各大科研院所對兩種模式下的自走式花生聯合收獲機[5]及自走型分段式花生收獲機[6]都有一定的研究,而對于牽引型分段式花生收獲機的研究相對較少。結合河南省花生主產區的種植模式和農用拖拉機保有量大的特點,為解決花生挖掘后人工撿拾秧果,勞動強度大、生產成本高的問題,成功設計了一種與拖拉機動力配套使用的牽引型分段式花生收獲機,并進行了田間試驗。
1 總體方案設計
本項目設計的牽引型分段式花生收獲機主要包括機架、傳動變速裝置、拾撿輸送裝置、攪龍裝置、清選分離裝置、集果裝置,以及輔助裝置。其設計結構圖如圖1所示。
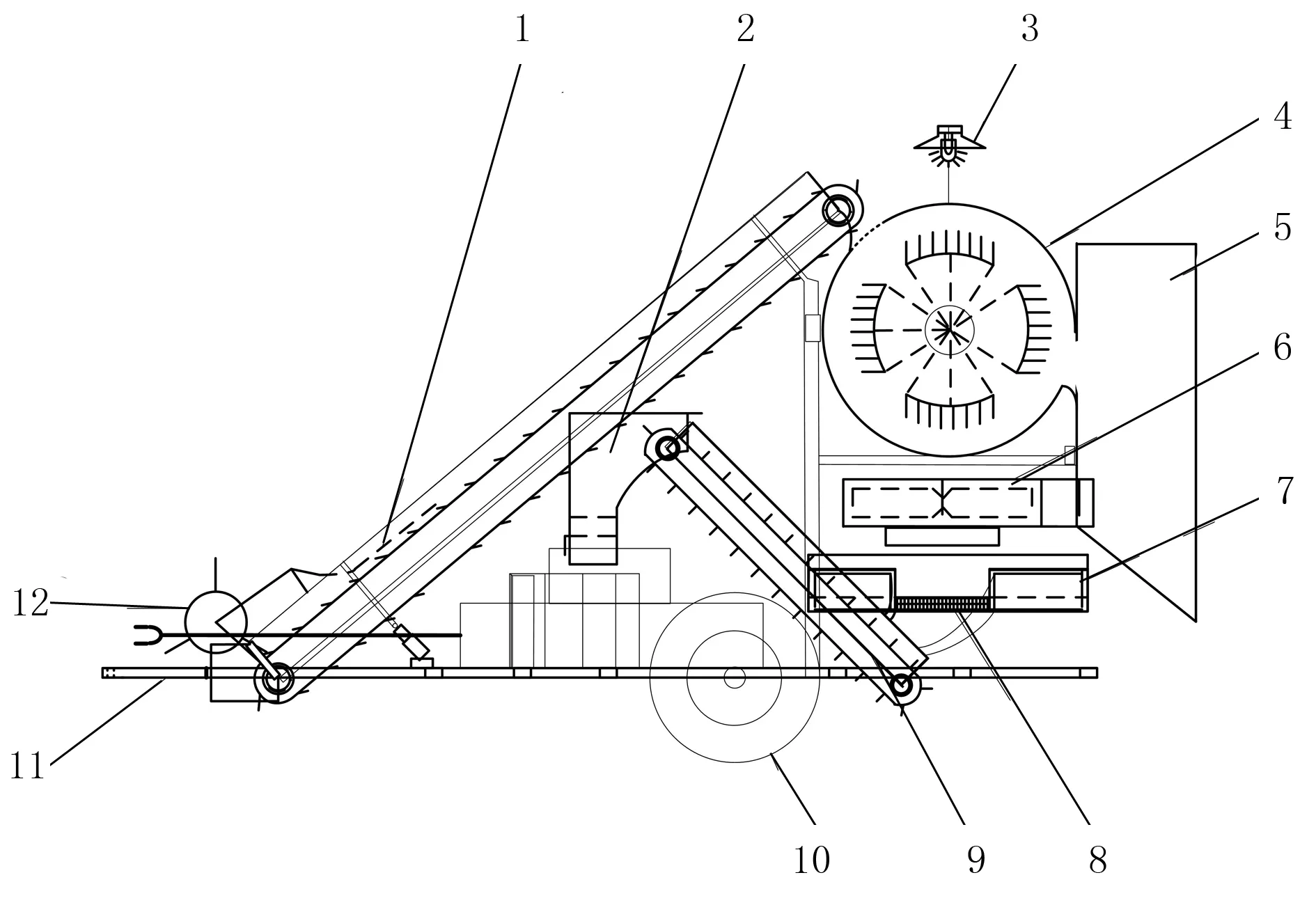
1.輸送裝置 2.集果箱 3.照明燈具 4.攪龍裝置 5.殘秧收集箱 6.傳送滾軸 7.吸風機 8.振動篩 9.集果傳送帶 10.地輪 11.機架 12.撿拾裝置
工作時,將該牽引式花生收獲機通過牽引架拖掛于拖拉機尾部,并將拖拉機的動力通過傳動變速裝置傳輸給收獲機的各個動力機構。通過液壓設備調節拾撿輸送裝置的高度,使花生秧果在扒秧齒和撿拾指的配合下進入傳送設備,在傳送設備頂端落入攪龍摘果裝置,實現秧果分離。花生碎秧則通過排秧口進入殘秧收集箱中,而花生果通過柵條蓖落入振動篩中進行清選分離。由于振動篩左高右低,使得花生果慢慢通過振動篩出口進入集果傳動帶中,在此之前,花生果中的雜質通過吸風機作用也進入殘秧收集箱中;花生果則由集果傳送帶送入集果箱,經分裝導板控制進行分裝。
設計該機工作速度為50m/min,工作行數為2壟4行,工作幅寬為1 200mm。
2 傳動系統設計
該收獲機械傳動系統如圖2所示。發動機動力經過傳動軸引入后,分為兩路傳動:一路經帶傳動到摘果攪龍主軸,保證攪龍裝置的動力充沛;攪龍主軸再通過帶傳動為振動篩、集果提升裝置及控制輸送裝置升降的氣泵提供動力,并通過錐齒輪驅動吸風機工作。另一路則利用帶傳動為秧果輸送裝置提供輸送動力,然后鏈傳動到自動撿拾裝置。機型結構設計緊湊、動力分配合理、工作協調,特別是作業中通過撿拾裝置的扒秧齒和輸送帶上的彈性撿拾指相互配合,使該機的抓秧能力增強,撿拾率自然提高。
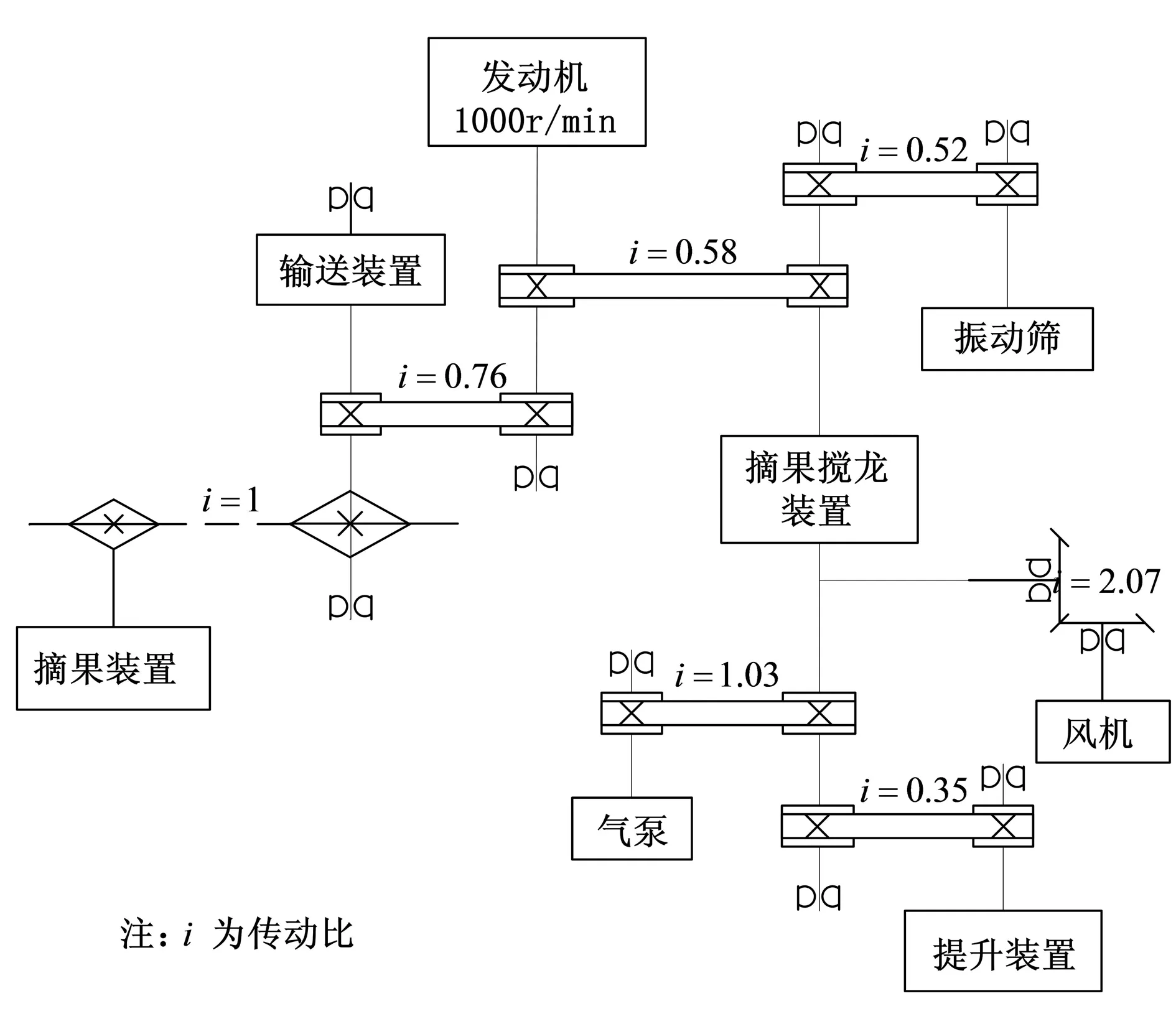
圖2 牽引型分段式花生收獲機傳動系統圖
3 主要工作部件設計
3.1 拾撿輸送裝置
拾撿輸送裝置主要是對在地表晾曬的花生秧果進行自動拾撿并輸送至摘果攪龍機構,在司機的操控下完成自動拾撿的功能。該機械的拾撿輸送裝置安裝在機架的左側,主要由拾撿設備和傳送設備兩部分組成。
3.1.1 拾撿設備[7-8]
自動撿拾設備是花生收獲機的工作入口設備,如圖3所示。工作時,當驅動盤隨著驅動軸轉動的時候,扒秧軸也隨著驅動軸做圓周運動;而撥秧齒在偏心輪的連帶下隨著扒秧軸做弧線往復運動,并保持齒尖一直朝向地面,既保證了工作的安全,又有效防止了花生秧果被帶出拾撿傳送裝置。撥秧齒運行到接近地面時,需通過氣泵控制拔秧齒的入土深度。
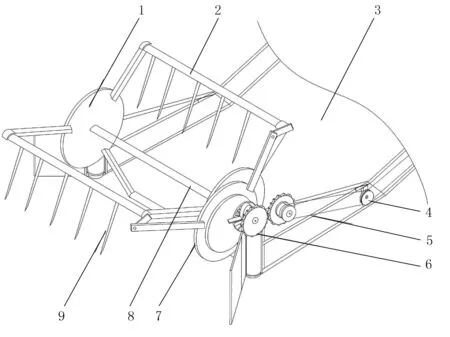
1.轉動盤 2.扒齒軸 3.提升裝置 4.動力輪 5.皮帶 6.驅動盤 7.偏心輪 8.驅動軸 9.扒秧齒
撥秧齒在收獲機作業過程中撿拾花生需要滿足一定的速度要求,因此必須保證扒秧齒的速度v1大于或等于拖拉機的前進速度v2,即v1≥v2。根據已知的機組前進速度及經驗取扒秧軸的速度為57m/min。撥秧齒的速度由扒秧軸決定,而扒秧軸的速度與轉速滿足以下關系,有
v1=2π·r·n
(1)
其中,n為扒秧軸的轉速(r/min);r為扒秧軸到驅動軸中心點的距離(mm)。
根據工作行數和幅寬的要求,所設計的扒秧裝置寬度為900mm,考慮到機器本身大小及工作實際情況,設定扒秧軸到驅動軸中心點距離為320mm,由此可以得出扒秧軸的轉速為28.4r/min。自主設計的撥秧齒參數如下:長度200mm,直徑10mm,普碳鋼材,工作時入土層深度3mm。
3.1.2 傳送設備
傳送設備需要將自動撿拾設備撿拾的花生秧果輸送到摘果攪龍進行摘果。其由底板、撿拾指、防飛擋條、液壓設備、輸送帶及輸送帶軸等組成,如圖4所示。

1.擋條 2.底板 3.撿拾指 4.傳送帶 5.心軸 6.液壓泵
工作時,花生秧果由撿拾裝置從地面撿起,從拔秧齒與撿拾指之間進入傳送設備,撿拾指不僅提升了拾撿效果,同時也在傳送過程中增加了抓力,防止花生秧果在傳送帶上產生擁堵,影響系統工作。通過反復試驗,選取花生秧果輸送速度57m/min、傳送設備傾角25°為最佳參數。
3.2 攪龍裝置
摘果裝置的作用是將花生果從花生蔓上摘下。花生莖蔓經輸送裝置送入摘果攪龍后,由于摘果攪龍的高速旋轉和凹板篩的靜止所產生的相對運動,使花生秧果在摘果齒的帶動下通過離心和甩捋作用將花生莢果和秧蔓分離,完成摘果過程。攪龍結構如圖5所示。
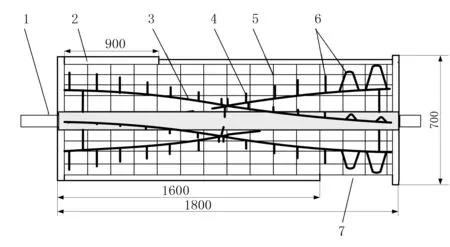
1.攪龍主軸 2.喂入口 3.摘果滾筒 4.摘果齒 5.柵條蓖 6.出口摘果齒 7.排秧口
牽引型分段式花生收獲機對挖掘后在地表晾曬一段時間的花生秧果進行撿拾摘果,由于在晾曬時間內日照強度與日照時間的不確定性造成晾曬的干濕程度也不盡相同,因此該機要適應干濕程度不同的花生秧果。在摘果過程中,較干的秧蔓密度小,易甩碎,莖稈韌性差,但不容易纏繞攪龍主軸,因此干式摘果裝置的攪龍是平行的;而較濕的秧蔓密度大,水分多,莖稈韌性好,容易纏繞摘果齒和攪龍主軸,一般攪龍成270°螺旋平行安裝。所以,針對干濕程度不同的秧果,為了提高機械的適用性,設計該摘果裝置的攪龍是安裝在與攪龍軸等半徑并呈90°螺旋的螺旋攪桿上,同時,攪龍的前部分摘果齒為直桿式,在排秧口附近的摘果齒的則是倒V型,高度均為80mm,從而保證了花生莖蔓的軸向運動,避免了秧果堵塞而造成機構的損壞,后續樣機試驗時效果良好。
摘果過程中,莢果破碎是需要正視的現實問題,主要是運動的莢果和固定的凹板篩、摘果室外殼之間因攪龍高速旋轉而造成的剪切破碎或撞擊破碎。轉速提升,摘果率也隨之提升,但莢果破碎率也會不斷上升;反之亦然。因此,攪龍轉速的設計必須要考慮對摘果率和破碎率造成的影響。轉速的計算公式為
(2)
(3)
所以得
(4)
其中,W為摘果齒摘取花生所做的功(kW)[9];v為攪龍甩捋的線速度(m/s);m為攪龍桿上摘果齒質量(kg);F為摘花生力的大小(N);A為摘果齒的截面積(m2);n為攪龍轉速(r/min)。
實際生產中,河南省地區地表花生晾曬比較徹底,含水率大約為20%~35%,查閱相關文獻資料,經多次分析計算和田間試驗,最終確定轉速為580r/min。
3.3 清選分離裝置
清選分離裝置在攪龍裝置的正下方,由振動篩、吸風機及殘秧收集箱等組成;吸風機安裝在振動篩靠出口位置正上方,殘陽收集箱設置在花生收獲機的最后方,與攪龍裝置排秧口、吸風機排風口相連通。
3.3.1 振動篩
振動篩選用單層沖孔篩結構,其長度方向與攪龍主軸方向一致,振動篩的設計要保證花生果在篩面上不至于從振動篩的孔隙中落下,如圖6所示。
由于一般花生莢果的厚度10~15mm 左右,但部分未成熟莢果偏小,因此采用用寬度為5m×20m的沖孔,以保證松散的泥土從空隙中落下,而花生果留在振動篩中,之后經過出果口落入到集果輸送裝置上。
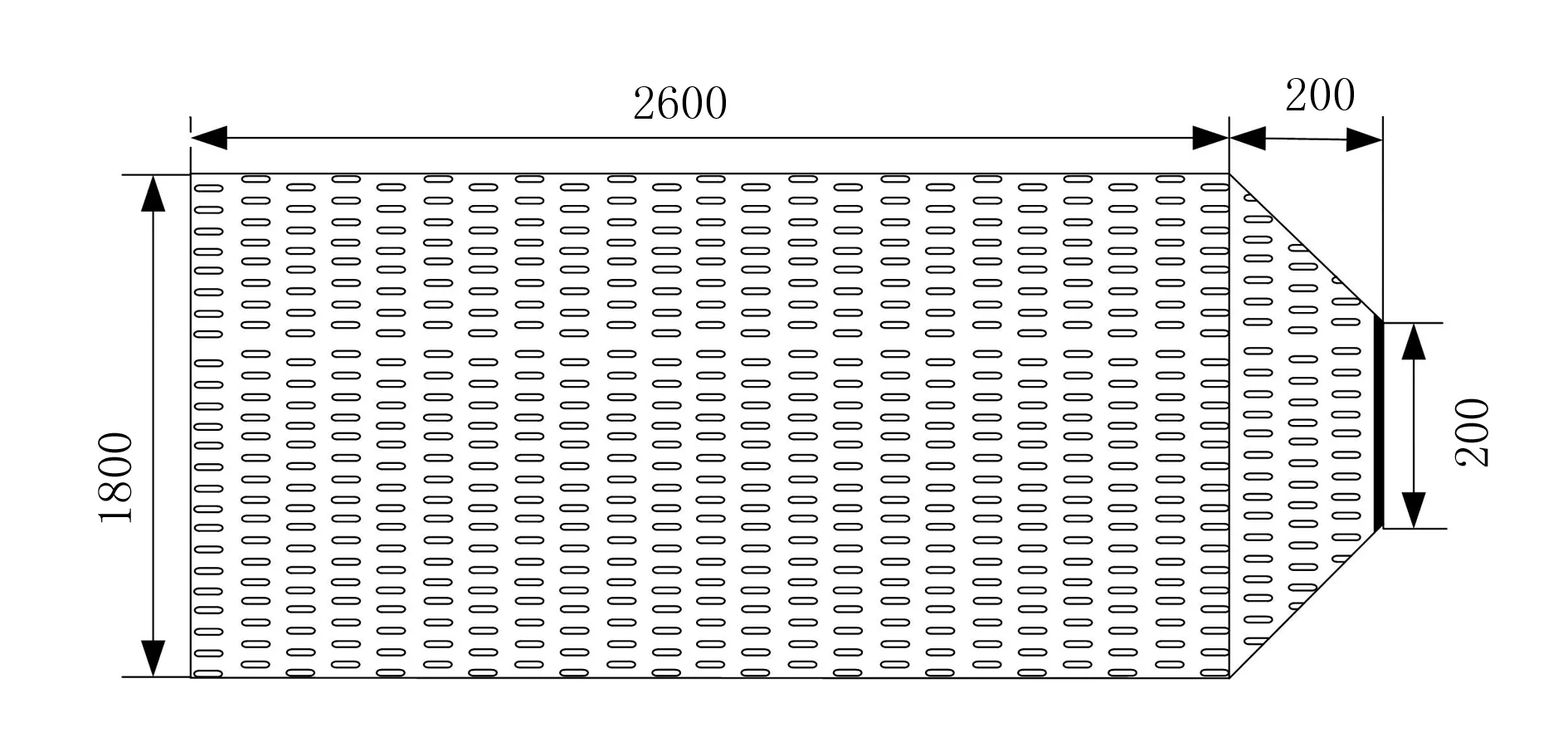
圖6 振動篩結構圖
安裝好的振動篩為左高右低的坡形,即靠近風機的一端低于另一端,傾角為10°,振動篩左端與偏心輪連接,由偏心輪[10]帶動振動篩左右晃動,如圖7所示。通過振動篩的往復抖動,使花生莢果、泥土和碎葉向振動篩出果口移動;在移動過程中,一方面可以篩落泥土和碎葉,另一方面也抖碎了較大的土塊,保證篩選質量。振動篩振動幅度的大小為[11]
(4)
其中,K為振動篩運動加速度比;r為偏心輪曲柄半徑(m);ω為轉動角速度(r/s);g為重力加速度(m/s2)。

1.偏心輪 2.齒輪箱 3.連接桿 4.皮帶輪 5.皮帶 6.振動篩 7.吊桿
由圖7可知:振動機構的擺幅近似為2r,振動過程中,不僅要考慮清選的效果,同時需要考慮振動篩中的脫出物拋離篩面的高度及向出果口移動的速度。參照文獻資料[12],結合田間試驗,在K取0.06、r取23mm時,曲柄角速度約為5.1r/s可以獲得較為理想的作業效果。
3.3.2 吸風機
通過振動篩清選后花生果從出果口流出,而尺寸較大的花生葉、長莖稈和雜質等在風機的作用下排出機外。該風機采取單風道離心式吸風機,安裝在振動篩出口的正上方,工作時碎葉等雜質通過進風口軸向進入風機葉片間,在葉片的旋轉離心作用下沿著出風口排出,如圖8所示。結合參考文獻資料[13]和田間試驗,最終確定具有較好的清選效果的風機轉速為1 200r/min。

1.扇葉 2.出風口 3.風機軸 4.進風口
3.3.3 殘秧收集箱
花生秧蔓也可以作為家畜飼料、生活燃料及有機肥料等進行利用,其在地表晾曬過的花生秧果在收獲中直接排出機外會造成工作環境塵土飛揚,影響工作效率和農戶身體健康。因此,特設置殘秧收集箱來存放農機工作過程中摘果裝置和吸風機排除的殘秧斷蔓。殘秧收集箱設置在花生收獲機的最后方,緊靠摘果攪龍裝置,同時與攪龍裝置排秧口、吸風機排風口相連通,尺寸大小為1800×1000×400(mm3)。
3.4 集果裝置
集果裝置在機架的右側,升運集果裝置的結構形式如圖9所示。該裝置采用25mm×25mm的普碳角鋼作為盛果槽,相互間距177mm,工作時只需要保證升運集果裝置與水平面夾角β小于90°,即可運送花生果。考慮到后續人工收集便利情況,相關設計參數為:提升輸送帶長1 600mm,寬500mm,傾角51°,傳送速度88m/min,集果箱尺寸500×200×500 (mm3)。
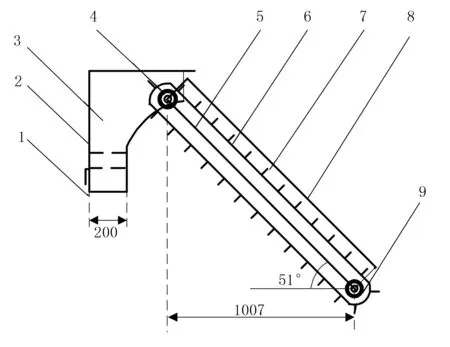
1.分裝口 2.分裝導板 3.落果箱 4.上心軸 5.底板 6.輸送帶 7.盛果槽 8.輸送擋板 9.下心軸
3.5 照明、后視裝置
為了方便農戶在梅雨季節或者天氣變化比較突然的情況下趕收花生,該機加裝照明設備和后視設備。照明設備由照明燈具和線路組成,安裝在攪龍裝置上方的左右兩側,提供全方位照明,功率為100W,收獲機前端由拖拉機本身照明設備提供照明。后視設備設置在拾撿輸送裝置前端上部,方位與農機司機平行,便于司機操作,提高夜間工作安全性。
4 試驗分析
本試驗在河南省汝南縣馬莊鄉試驗田進行。試驗對象為魯花11號花生品種,分枝8條左右,株型緊湊,結果整齊集中,每百果質量216.0g左右[14],每百仁質量90.0g 以上。驅動動力為耕王RD340-B拖拉機(22.1kW)。花生種植行距200mm,株距150mm。試驗所用花生在試驗地表晾曬2天,隨機抽樣10次。平均生長狀況:單株蔓苗高度478.6mm,單株蔓質量117.4g,單株花生果質量123.5g。在制定的測試區內,按照《NY/7502-2002 花生收獲機作業質量》標準進行試驗,如圖10所示。

圖10 花生收獲樣機田間試驗
樣機作業質量參數為樣機的撿拾率、損失率、生產率等,與之相關的設計參數為輸送裝置傾角、機械行走速度和輸送速度。由于分析試驗的指標和多個試驗因素之間是多元非線性的曲線或者曲面的關系,所以試驗采用響應面分析法(RSM)進行分析。即以機組行走速度X1、撿拾輸送速度X2、輸送傾角X3為3因素,以試驗中測定的撿拾率Y1、損失率Y2及生產率Y3作為響應值。采用三因素三水平二次回歸正交組合試驗設計方案[15]對影響樣機作業質量的因素進行組合優化,如表1所示。

表1 樣機試驗因素與水平設置
各因素各水平組合下的樣機試驗分析方案及試驗結果如表2所示。
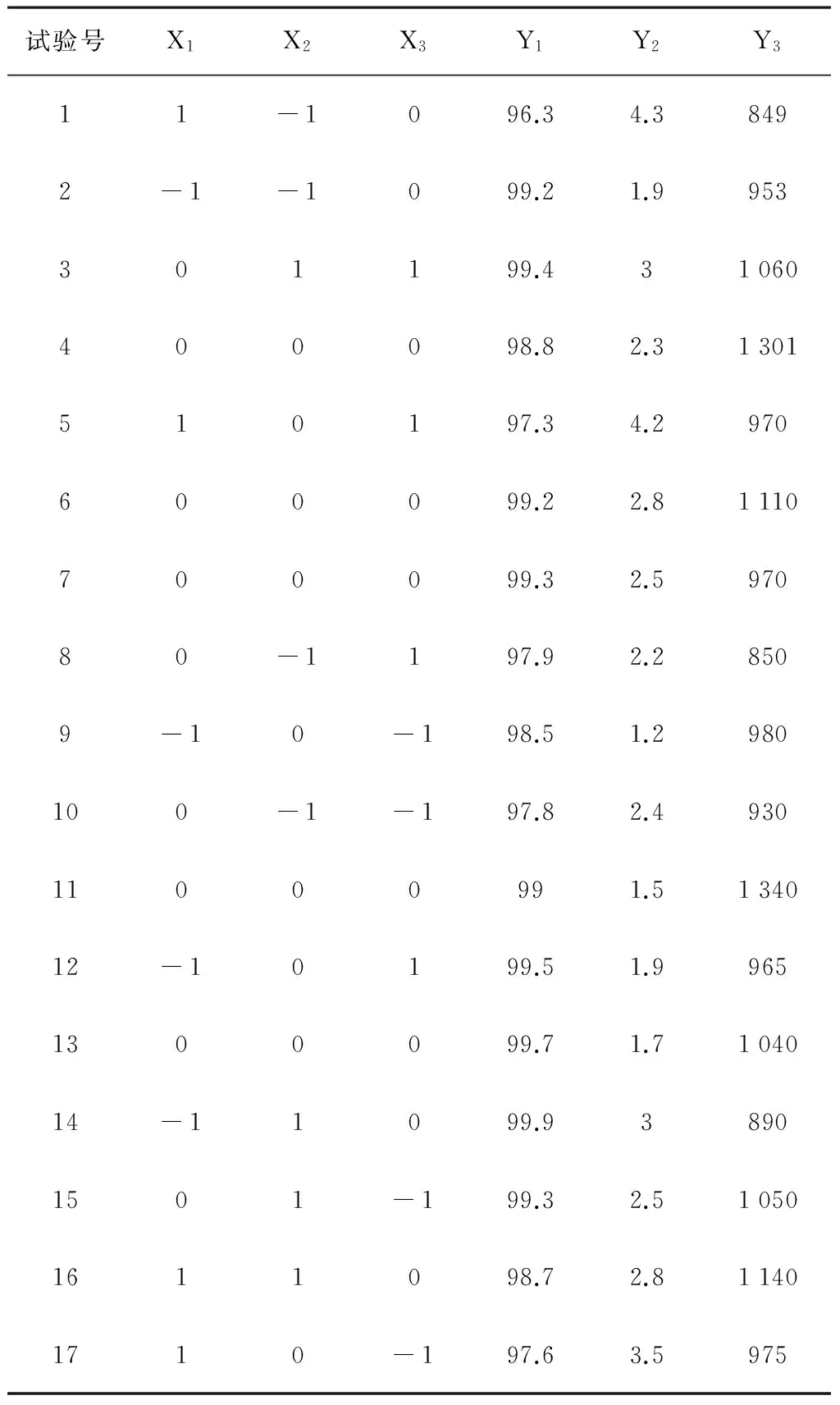
表2 試驗分析方案及試驗結果
在參量的約束條件(-1≤Xi≤1)內,在試驗結果理想的顯著性水平下,通過計算得到3個無量綱因素編碼回歸方程為
Y1=90.2875+0.0929X1+0.0642X2+0.3446X3+
0.0024X1X2-0.0022X1X3-0.0023X12-
0.0010X22-0.0045X32
Y2=3.6291+0.0369X1-0.1139X2-0.0781X3-
0.0036X1X2+0.0015X2X3+0.0023X12+0.0023X22
Y3=-1308.5076+15.9306X1+53.4125X2+28.6541X3+
0.4917X1X2+0.0167X1X3+0.1875X2X3-

由試驗分析軟件繪制如下三維立體圖,對試驗進行分析,由圖11~圖13可以看出:在輸送裝置傾角一定的情況下,撿拾率與機組前進速度和撿拾輸送速度均近似線性關系,撿拾速度過快,撿拾率就下降,機組前進速度越小,撿拾越干凈,并且保證撿拾輸送速度大于機組前進速度;損失率主要與機組前進速度相關,機組前進速度越大,損失率越高;生產率則受機組前進速度、拾撿輸送裝速度及輸送裝置傾角共同影響,呈二次曲線關系;機組前進速度、機組前進速度和撿拾輸送速度產生的交互項對生產率的影響較大。
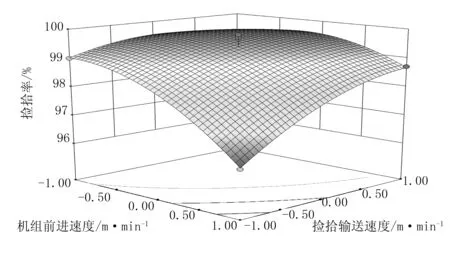
圖11 撿拾率與機組前進速度、撿拾輸送速度的三維圖
Y1、X1、X2
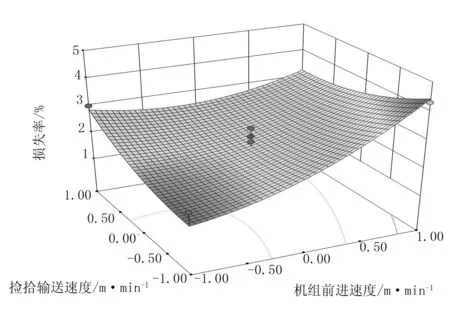
圖12 損失率與機組前進速度、撿拾輸送速度的三維圖
Y2、X1、 X2
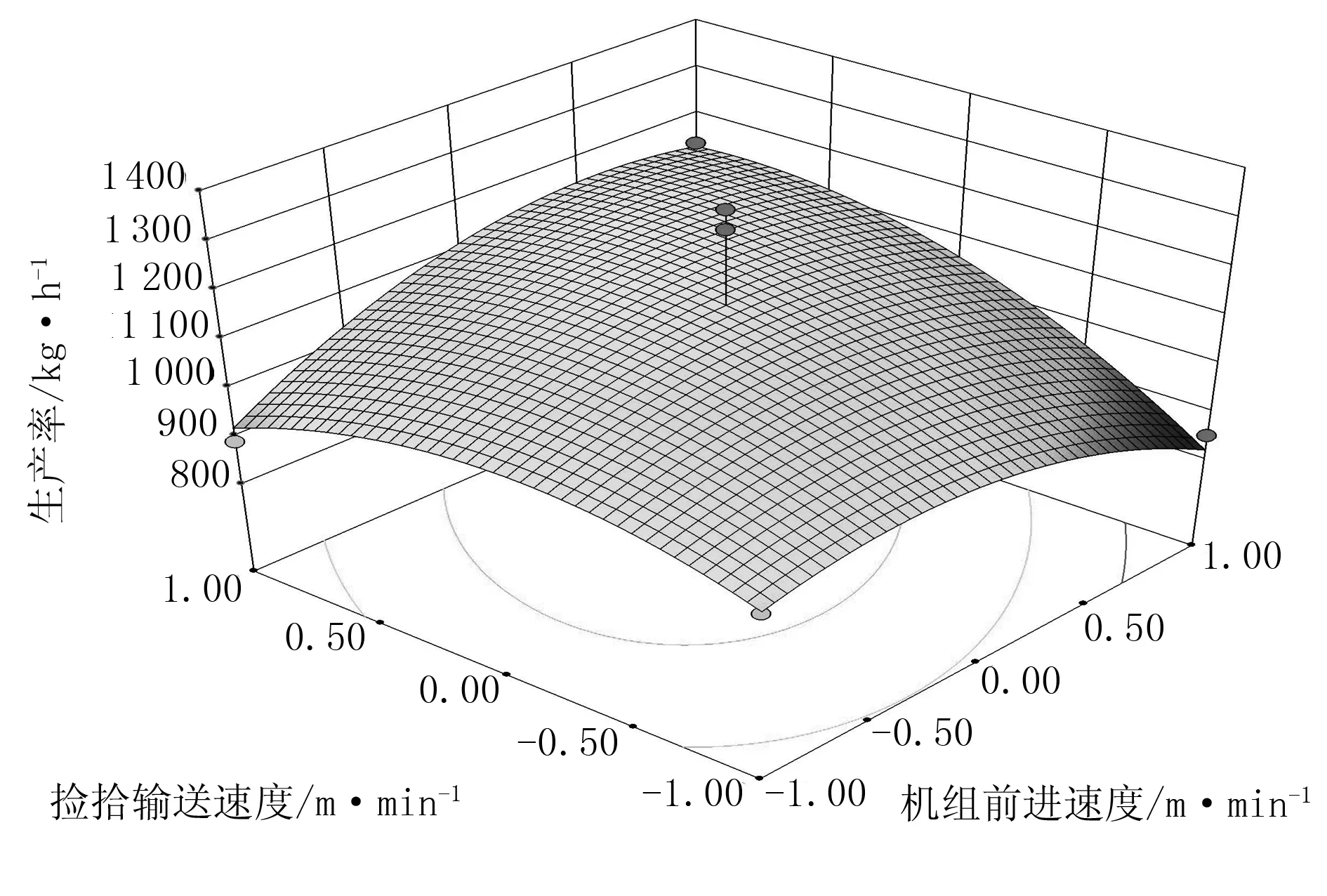
圖13 生產率與機組前進速度、撿拾輸送速度的三維圖
Y3、X1、X2
對試驗中響應值最優時的試驗因素值進行組合優化,得到試驗的最佳參數組合,如表3所示。
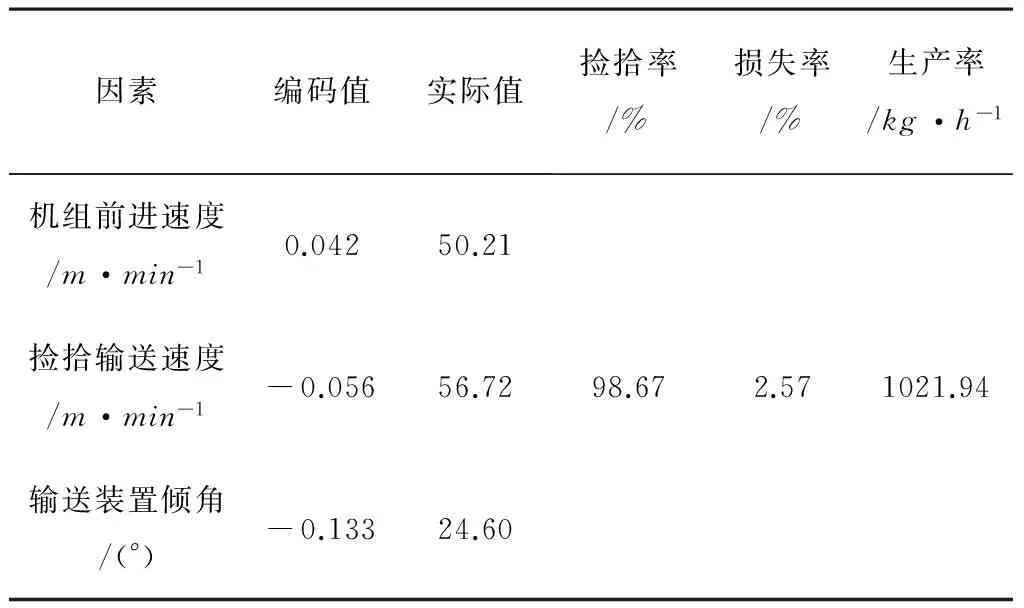
表3 試驗參數優化
將試驗因素的優化進行取整:機組前進速度50m/min,撿拾輸送速度57m/min,輸送裝置傾角25°。在相同的試驗條件下進行試驗,可以看到該機型設計合理、工作穩定、適用性強,拔秧撿拾性能良好,不易使花生收獲機堵塞。優化試驗結果得:撿拾率為98.8%,損失率為2.8%,生產率為1017kg/h,實際試驗與理論結果十分接近。考慮到作業中存在各種干擾因素,可以認為理論值是正確的,且試驗過程與結果符合花生收獲機行業標準NY/7502-2002[16]的規定,故在實際收獲作業過程中可以應用上述結果。
5 結論
該牽引型分段式花生收獲機在分段收獲的基礎上,采用的主要技術創新有:
1)自主設計新型的前置式自動拾撿裝置,不僅避免了彈性拾撿裝置應力不足且易變形的問題,而且提升了抓秧能力,視野寬廣,可以適應不同地塊的撿拾收獲作業;
2)秧果輸送裝置與尼龍彈齒撿拾指、防飛擋條相結合,解決了秧果傳送過程中常出現的輸送無力、擁堵及拋出等現象;
3)創新設計螺旋圓弧攪龍,可以對干濕程度不同的花生進行摘果,并且保證花生秧蔓能順利排出,不纏繞;
4)殘秧收集箱與攪龍排秧口和吸風機出風口相連通,不僅優化了工作環境,最大限度地降低農機作業過程中粉塵飛揚,而且便于農民收集花生秧蔓并再次利用。
通過田間性能試驗,驗證了該牽引型分段式花生收獲機的良好作業性能,自動撿拾秧果能力顯著提高,撿拾率達到98.8%,生產率1 017kg/h,損失率2.8%,均優于農業行業標準NY/7502-2002,滿足實際生產要求。
[1] 程晉.花生收獲作業機械發展現狀概述[J].農業科技與裝備,2013,224(2):47-51.
[2] 孫玉濤,尚書旗,王東偉,等.美國花生收獲機械現狀與技術特點分析[J].農機化研究, 2014,36(4):7-11.
[3] 王家潤,吳長城,余輝,等.豫南夏花生機械化生產技術[J].種業導刊,2014(4):12-13.
[4] 關萌,趙寶權,高連興.花生收獲機械的類型及特點[J].農業科技與裝備,2013(10):34-39.
[5] 胡志超,王海鷗,王建楠.4HLB-2型半喂入花生聯合收獲機試驗[J].農業機械學報,2010,54(4):79-84.
[6] 柴恒輝,楊然兵,尚書旗.4SHWZ-1800自走型分段式花生收獲機的研制[J].農機化研究,2014,36(9):76-80.
[7] 劉大華. 喂入式自動扒秧裝置:中國,201420113141.X[P].2014-03-13.
[8] 衡耀付,陳海需,衡星,等.一種新型自動扒秧裝置:中國,201420854877.2[P].2014-12-30.
[9] 胡志超,王海鷗,彭保良.半喂入花生摘果裝置優化設計與試驗[J].農業機械學報,2012, 43(10):131-136.
[10] 劉大華.花生摘果機震動篩傳動裝置:中國,20142011340 0.9[P].2014-03-13.
[11] 卡那沃依斯基. 收獲機械[M].北京:中國農業機械出版社,1983:174-192.
[12] 張星蘭,何月娥.谷物收割機械理論與計算[M].長春:吉林人民出版社,1980:162-165.
[13] 王東偉,尚書旗,韓 坤.4HJL-2 型花生撿拾摘果聯合收獲機的設計與試驗[J].農業工程學報,2013, 29(11):27-36.
[14] 吳德相. 魯花11號花生[J].種子科技,1993,9(4):45.
[15] 黃玉碧,明道緒.三因素隨機區組試驗結果的二次回歸分析法[J].四川農業大學學報, 1997, 15(4):424-430.
[16] 中華人民共和國農業部.NY/T502- 2002.花生收獲機作業質量[S].北京:中國標準出版社,2002.
[17] 孫同珍,尚書旗,李國瑩.4HQL-2型花生聯合收獲機摘果及清選部件的研制[J].農機化研究,2009, 31(6):54-57.
Design of Trailed Segmental Peanut Harvester
Chen Haixu1, Heng Yaofu1, Jiang Jun2, Yang Yingying1, Liu Dahua1
(1.College of Mechanical and Electrical Engineering, Huanghuai University, Zhumadian 463000, China;2.Zhumadian Academy of Agricultural Sciences, Zhumadian 463000, China)
Combined the peanut planting pattern of main producing areas and plenty of farm tractors in Henan province,in order to solve the problem of higher labor intensity and higher production cost after digging peanut. a trailed segmental peanut harvester using tractor power was successfully developed, It is consisted of the transmission device, pick up and conveying equipment, auger device, choosing separation device, collecting equipment and related ancillary equipment. On the base of segmented harvester,automatic picker is developed, improving the ability to grasp the seedling; Innovative design on spiral arc auger and the choosing separation system which is composed of vibrating screen and suction fan,to make the choosing effect better than ever,and to avoid the dust float in the sky as far as possible when the machine works. Field experiments show that the machine work performance is good, the collecting rate was 98.7%, the loss rate was 2.57%, productivity was 1022 kg/h, every index reaches the national standards (NY/7502-7502), fully meeting the actual production requirement.
trailed; segmented harvest; automatic-pickup; peanut harvester
2016-04-11
河南省高校重點科研項目(15A460028)
陳海需(1987-),男,河南南陽人,講師,(E-mail)hesue_chan@126.com。
衡耀付(1966-),男,河南駐馬店人,教授,(E-mail)hengyaofu@163.com。
S225.7+3
A
1003-188X(2017)04-0122-07
