輕型操作臂結合部彈性約束動力學特性及實驗研究
2017-12-15 05:50:49劉玉飛許德章
中國機械工程 2017年23期
劉玉飛 張 席 李 威 許德章
1.安徽工程大學機械與汽車工程學院,蕪湖,2410002.安徽工程大學工程研發與訓練中心,蕪湖,2410003.中國礦業大學機電工程學院,徐州,221116
輕型操作臂結合部彈性約束動力學特性及實驗研究
劉玉飛1,3張 席2,3李 威3許德章1
1.安徽工程大學機械與汽車工程學院,蕪湖,2410002.安徽工程大學工程研發與訓練中心,蕪湖,2410003.中國礦業大學機電工程學院,徐州,221116
對結合部彈性約束下輕型操作臂系統的動力學特性進行了研究。首先,基于結合部的線約束剛度,建立了輕型操作臂的彈性約束模型,得到系統的頻率特性方程;其次,基于建立的彈性約束模型,采用哈密頓變分原理推導了系統的振動位移方程;最后,采用理論仿真和實驗方法對輕型操作臂彈性約束系統的動力學特性進行分析,探討了結合部彈性約束對系統動態特性的影響機理。研究結果表明:所建彈性約束模型能夠表征結合部的彈性約束作用,尤其對高階模態的分析具有較高精度;在彈性約束區域內,頻率與約束剛度之間具有冪函數關系特征,前兩階頻率擬合誤差分別小于0.08%和0.45%;振動位移分析誤差為2.38%,通過實驗驗證了系統彈性約束模型和動力學分析結果的正確性。
輕型操作臂;結合部;彈性約束;動力學
0 引言
操作臂是機器人的重要組成部分,通過操作機構及其末端執行器完成特定的操作任務,在機械加工、精密裝配以及上下料、噴涂等作業中有著廣泛應用[1-3]。現代制造裝備正不斷向輕型和集成化方向發展,傳統的剛性操作臂已難以滿足該發展要求[4]。輕型操作臂與傳統的剛性操作臂相比具有輕質、靈活以及執行高速大范圍操作時能量消耗較低等特點[5-6]。在保證功能的同時,輕型操作臂可顯著減小結構的質量,并且是典型的柔性結構,有利于實現結構的智能控制[7]。由于采用輕質材料,輕型操作臂的剛度和阻尼均較小,在執行操作、啟停以及運動轉換的過程中極易受到外界激勵而產生彈性振動,并非完全的剛性結構特性,且在高速操作時振動更為明顯[5, 8-9]。彈性振動嚴重影響了操作臂的操作性能和控制精度,降低了結構壽命,因此需要對輕型操作臂的動態特性進行研究。
輕型操作臂的操作機構通過結合部與機器人本體連接組成耦合系統[10],結構間的耦合作用進一步影響系統的動態特性,而這種耦合作用是通過結合部傳遞的,因此在分析輕型操作臂的動力學特性時有必要考慮結合部性能的影響。本文考慮結合部的彈性約束效應,通過仿真分析和實驗對結合部彈性約束下的輕型操作臂彈性約束系統的動力學特性進行研究。
1 輕型操作臂彈性約束系統動力學方程
1.1 彈性約束系統頻率方程
分析輕型操作臂的動力學特性,首先要根據結合部的約束性能建立系統的約束模型。在理想情況下,操作機構與機器人本體之間結合部的約束被視為完全剛性的,而在實際過程中由于預緊力控制不準以及服役過程產生松動的影響,結合部常表現出一定的彈性約束效應,影響系統的整體性能。由文獻[11]可知,結合部的彈性約束效應可以用線約束和扭轉約束的疊加表示。此外,根據模態靈敏度分析結果,線約束對系統的影響占主要成分[12]。為此,本文考慮結合部的線約束作用對其彈性約束效應進行表征。通過系統子結構劃分,將系統劃分為操作機構、機器人本體和結合部子結構,并建立系統的彈性約束模型如圖1所示。其中,k為約束剛度,c為阻尼系數。
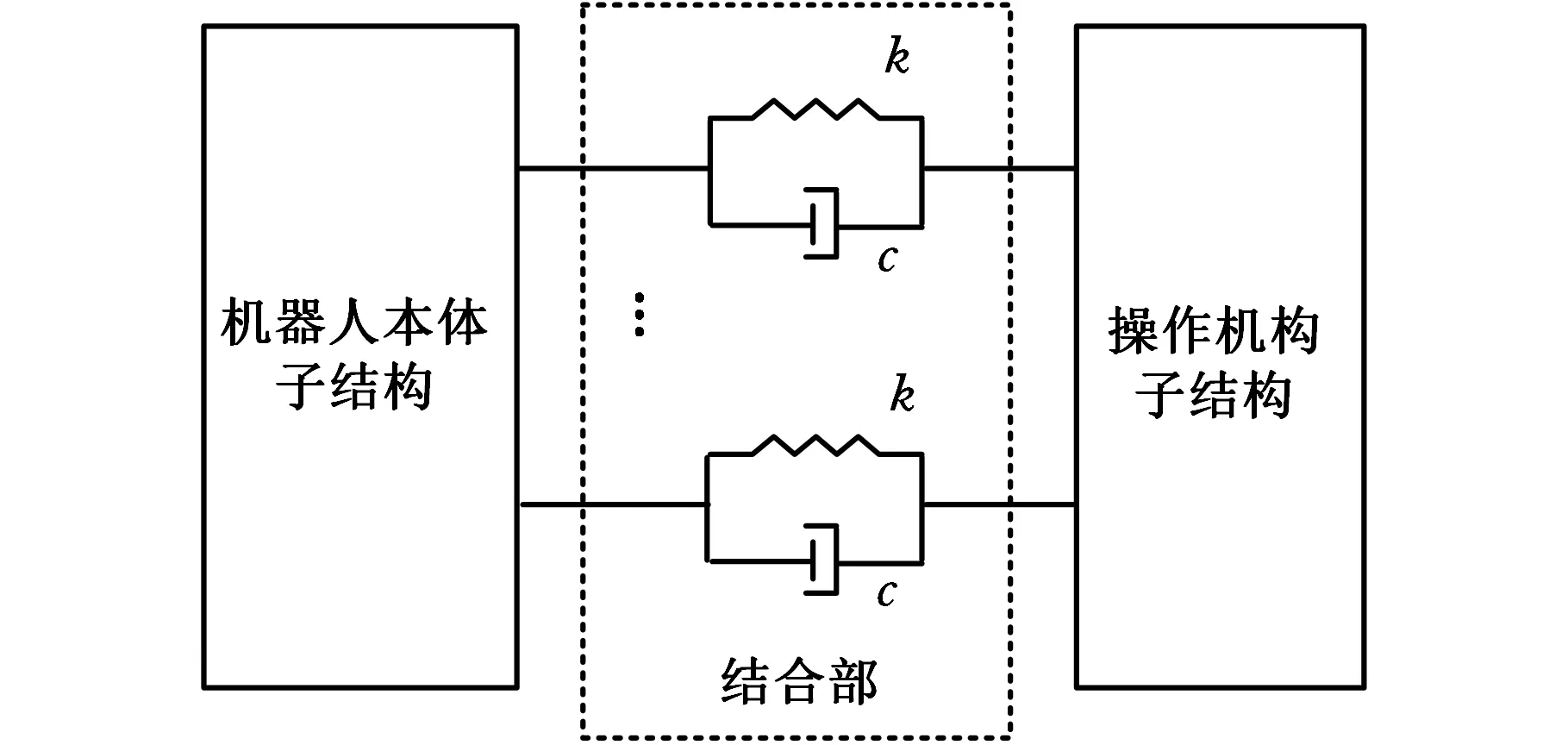
圖1 輕型操作臂系統子結構劃分及彈性約束模型Fig.1 Substructure division and elastic restraint model of the flexible manipulator system
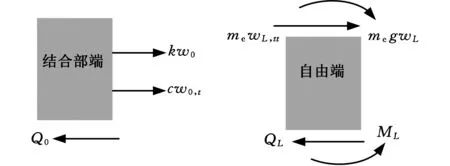
圖2 輕型操作臂彈性約束系統的受力分析Fig.2 Force analysis of the elastic restraint joints for the flexible manipulator
根據材料力學理論[13],輕型操作臂彈性形變產生的剪力Q和彎矩M分別為
(1)
I=bh3/12
式中,E為彈性模量;I為慣性矩;b為寬度;h為厚度。
根據結合部端的力平衡關系可得
(2)
(3)
同理可得自由端(x=L)的邊界條件如下:
(4)
由式(3)可以看出,當輕型操作臂的結合部端存在相對速度時,結合部阻尼對系統的邊界條件會產生一定的影響。而在實際操作過程中操作機構與機器人本體之間相對速度較小,且結構阻尼對系統模態特性影響較小[14],因此,在分析輕型操作臂彈性約束系統的模態特性時,忽略結合部阻尼的影響。
根據模態疊加原理[14],輕型操作臂的振動位移w(x,t)可表示為
(5)
式中,q(t)為系統的廣義坐標;φ(x)為輕型操作臂的振型函數。
為此,結合部彈性約束下輕型操作臂的邊界條件可簡化為
(6)
(7)
式中,ω為輕型操作臂的角頻率。
不失一般性,將結合部彈性約束下輕型操作臂的振型函數表示為[14]
φ(x)=α1sinβx+α2cosβx+α3sinhβx+α4coshβx
(8)

(9)
A=bh
式中,α1、α2、α3、α4均為由邊界條件確定的系數;β為與角頻率ω有關的量;ρ為質量密度;A為橫截面面積。
將式(8)分別代入式(6)和式(7)并將結果寫成矩陣形式:
(10)
λ=EIβ2
(11)

根據式(10)和式(11),消去系數α3、α4,得
(12)

Δ21=βψ(sinhβL-sinβL)+β(cosβL+coshβL)
Δ22=βψ(coshβL-cosβL)-β(sinβL-sinhβL)
為保證振型函數的存在,式(8)的系數α1、α2、α3、α4不全為零。則式(12)需滿足
(13)
將式(13)展開可得結合部彈性約束下輕型操作臂的模態頻率方程如下:

(14)
從式(14)可以看出,輕型操作臂的模態頻率與結合部約束剛度密切相關,當忽略末端執行器負載的作用(即me=0)時,輕型操作臂彈性約束系統的頻率方程可轉化為
βλcosβLsinhβL+βλsinβLcoshβL-
kcosβLcoshβL-k=0
(15)
通常意義下假設的結合部完全剛性約束所對應的約束條件為k→+∞,代入式(15)得
cosβLcoshβL+1=0
(16)
式(16)即為理想固定約束下輕型操作臂的頻率方程。由此說明,將結合部視為完全剛性只是一種理想情況,若忽略結合部的彈性約束作用而將其視為理想的固定約束,將導致分析結果出現誤差甚至錯誤,尤其對操作精度有一定要求的輕型操作臂具有重要的影響。另外,以上求解過程驗證了所得頻率方程的正確性,同時也說明本文所建彈性約束模型能夠合理表征結合部的彈性約束作用,且與文獻[11]采用線約束和扭轉約束組合建模相比,本文所建彈性約束模型更為簡化。
1.2 彈性約束系統振動位移方程
在輕型操作臂執行操作任務的過程中存在彈性振動,彈性振動對系統動態性能具有明顯影響。為此,以輕型操作臂平移運動為例,建立輕型操作臂彈性約束系統的動力學方程,并對系統的振動特性進行分析。
系統的動能ET為


(17)

系統的勢能主要考慮輕型操作臂的彈性勢能:
(18)
式中,EV為系統的勢能;Ki為系統的模態剛度。
定義拉格朗日函數U為
U=ET-EV
(19)
根據哈密頓變分原理[13],式(19)滿足
(20)

(21)
(22)
將式(21)和式(22)代入式(20),可得輕型操作臂廣義坐標運動方程如下:

(23)
根據杜哈梅積分[14],輕型操作臂的振動位移方程為
(24)
結合式(18),可得輕型操作臂的橫向振動位移如下:

(25)
φ(x)即為結合部彈性約束下輕型操作臂的振型函數,可以看出,輕型操作臂的振動特性與結合部約束密切相關,由式(8)和式(10)可得

(26)
2 仿真與實驗分析
2.1 頻率特性分析及特征擬合
式(15)給出了結合部彈性約束下輕型操作臂彈性約束系統的頻率方程,基于此對輕型操作臂彈性約束系統的頻率特性作進一步分析。本文主要分析輕型操作臂的前三階模態頻率,并采用數值方法對頻率方程進行求解。選取的輕型操作臂的結構參數如表1所示。

表1 輕型操作臂的結構參數Tab.1 Structural parameters of the flexible manipulator
圖3所示為結合部約束剛度k對輕型操作臂模態頻率的影響。由圖3可以看出,隨著約束剛度的增大,前三階頻率均增大,并逐漸趨于理想的固定約束情形下的前三階頻率(10.6801 Hz、66.9317 Hz、187.4121 Hz),結合部彈性約束下前三階頻率小于理想固定約束情形。可將區間[1.0×104N/m、1.0×106N/m視為結合部的彈性約束區域,在該區域內模態頻率與約束剛度之間的關系曲線具有冪函數的特性。為進一步確定約束剛度與模態頻率之間的關系,采用冪函數對該區間的頻率曲線進行擬合。因此,構造近似函數為
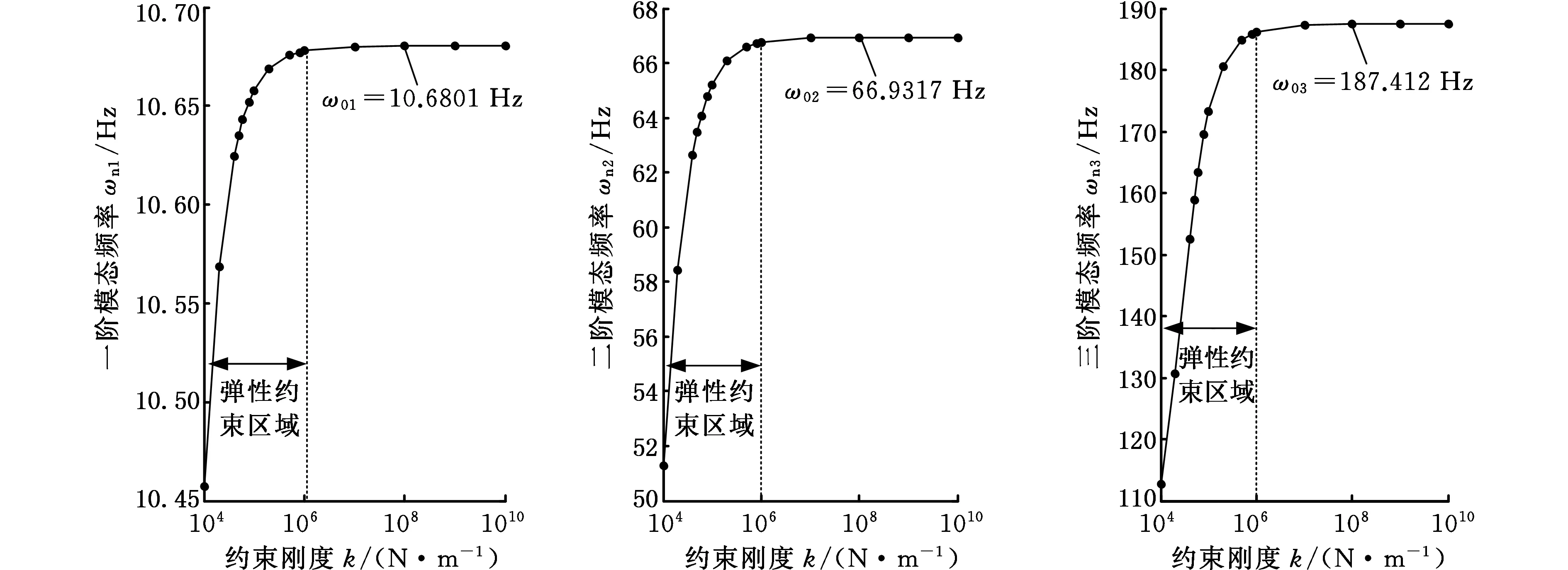
(a)第一階 (b)第二階 (c)第三階圖3 約束剛度k與模態頻率的關系Fig.3 Relationship between the tensional restraint stiffness k and the mode frequencies
(27)
式中,ωni為模態頻率;ai、bi、ci為待定系數。
基于MATLAB曲線擬合工具箱cftool,得到輕型操作臂前三階頻率擬合曲線,分別如圖4、圖5和圖6所示,各階頻率擬合方程系數的可信取值范圍如表2所示。
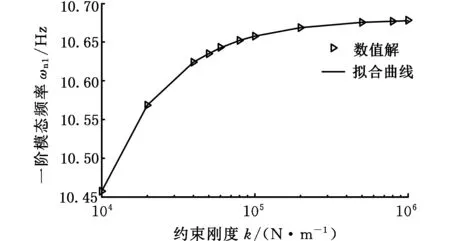
圖4 一階模態頻率擬合曲線Fig.4 Fitting curve of the first order mode frequency
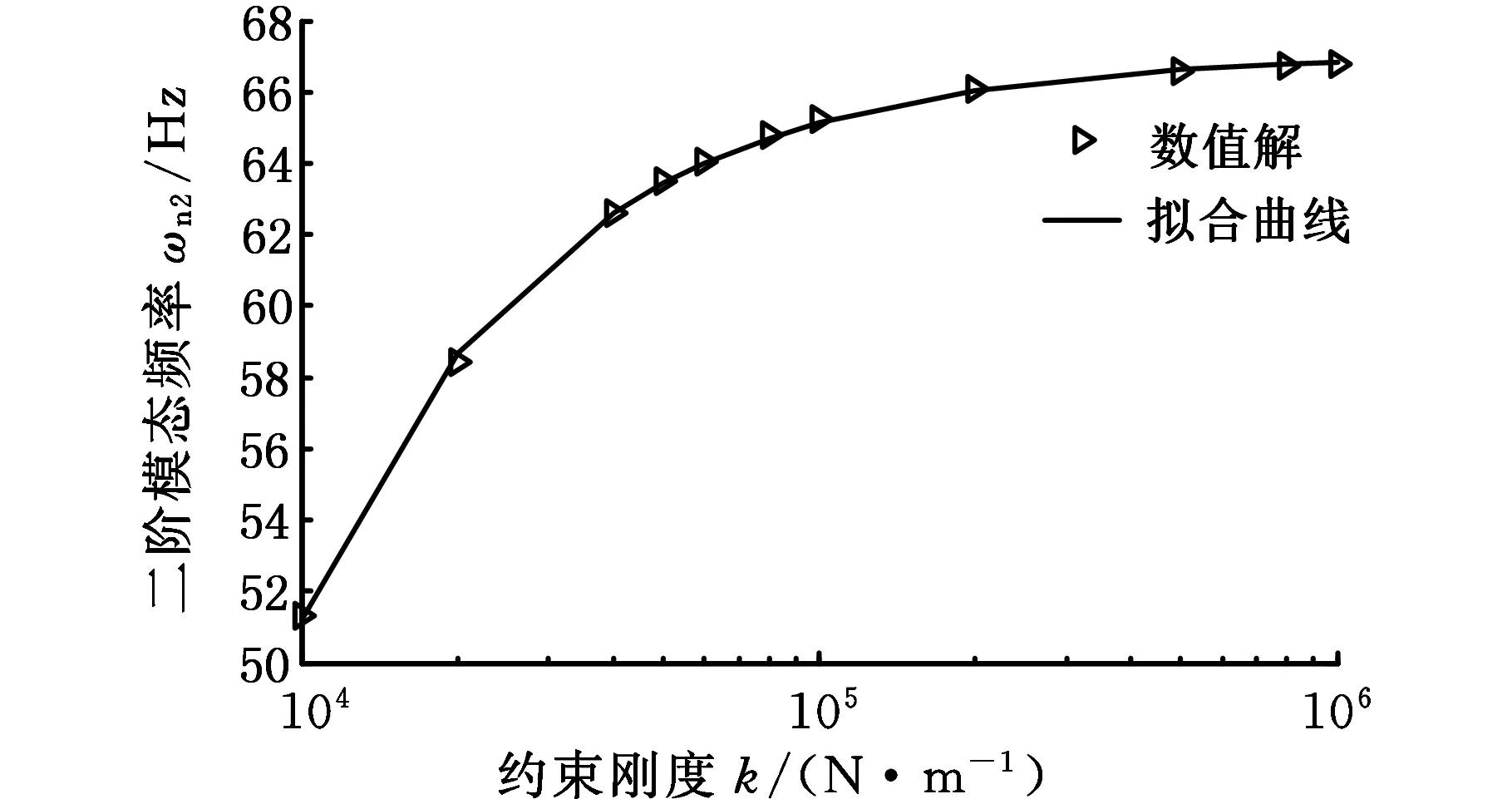
圖5 二階模態頻率擬合曲線Fig.5 Fitting curve of the second order mode frequency
圖7所示為根據頻率擬合方程求解得到的頻率值的誤差。由圖7可以看出,一階頻率和二階頻率擬合誤差分別小于0.08%和0.45%,當約束剛度較低時,三階頻率的擬合誤差大于一階和二階,但隨著約束剛度的增大,各階頻率的擬合誤差均明顯減小。由此說明,構造的頻率擬合方程可表征結合部彈性約束與頻率的關系,且對前兩階模態具有較高精度。
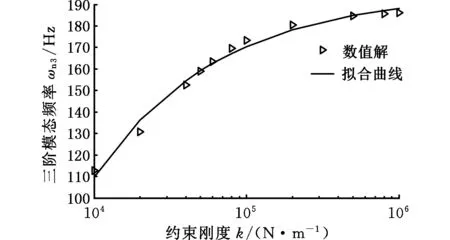
圖6 三階模態頻率擬合曲線Fig.6 Fitting curve of the third order mode frequency

表2 頻率擬合方程系數的可信取值范圍Tab.2 Reliable values of the frequency fitting equation coefficients
2.2 實驗測試與分析
為了對本文輕型操作臂彈性約束系統理論分析的結果作進一步分析和驗證,故搭建輕型操作臂實驗平臺,進行模態和動力學測試實驗,如圖8所示。輕型操作臂操作機構采用環氧樹脂板進行模擬,與機器人本體之間采用螺栓連接以模擬結合部的作用。實驗采用力錘激勵、單點拾振法。建立模態分析模型時,將操作臂長度等分為10段,寬度等分為2段,厚度視為1段,并根據節點確定測點布置,如圖9所示。選取測點3為拾振點,其余點為激勵點。操作臂測點3的位置固定壓電式加速度傳感器,型號為DH131,用來采集操作臂的振動信號,同時模擬負載作用;電荷適調器型號為DH5857-1,用來采集信號的轉化、處理和放大;模態分析軟件選用DH5927N動態信號采集分析系統。
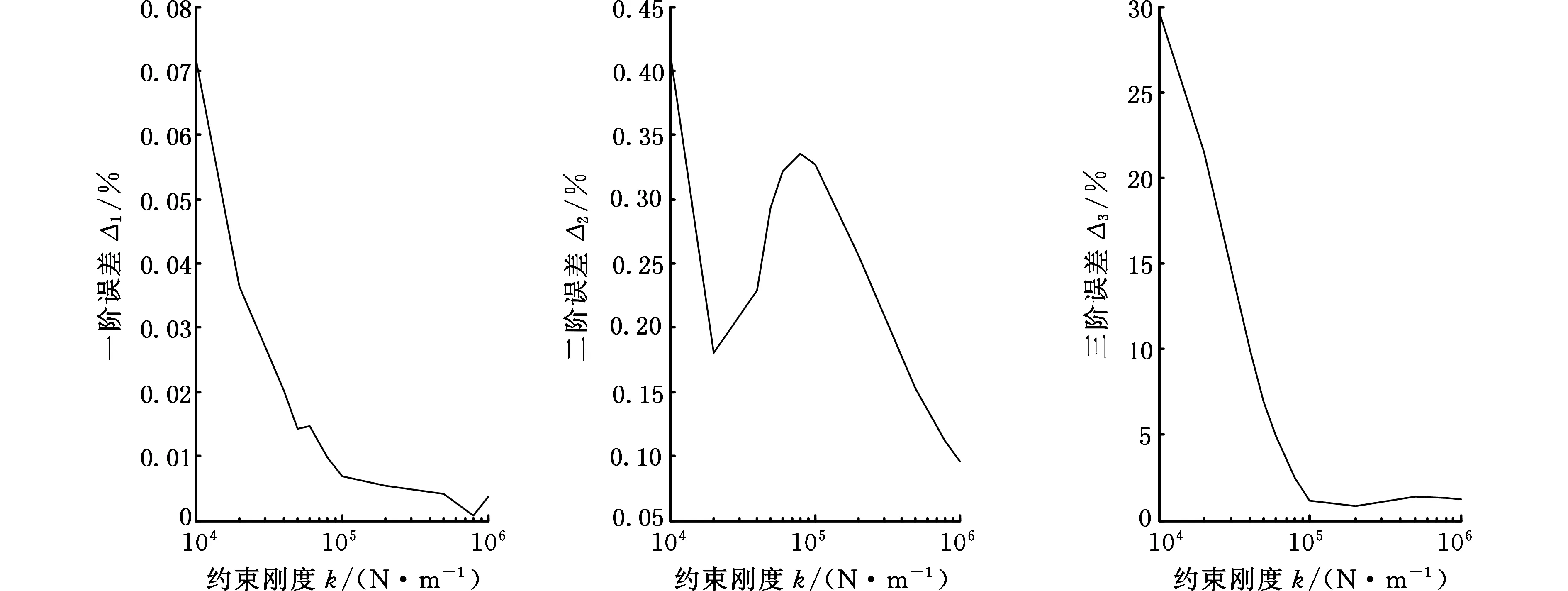
(a)第一階 (b)第二階 (c)第三階圖7 頻率擬合結果誤差Fig.7 Error analysis of the frequencies fitting
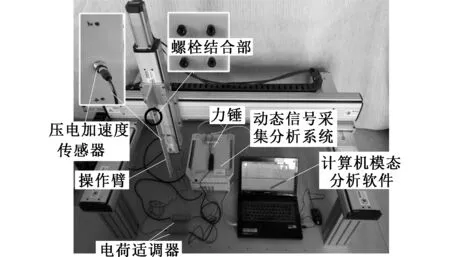
圖8 輕型操作臂模態測試實驗系統Fig.8 Experiment system for the modal test of the flexible manipulator

圖9 測點布置圖Fig.9 Distribution of the measuring points
采用力錘激勵,通過動態信號采集分析系統實時采集激勵力和響應振動信號,得到10組頻響函數數據。將測試得到的數據添加到模型數據中,選用多參考點最小二乘復頻域法(PolyLSCF法)對頻響函數數據進行分析,計算得到輕型操作臂的前三階頻率分別為9.12 Hz、55.59 Hz、151.85 Hz。圖10所示為模態分析模型驗證,可知模態實驗結果是正確的。
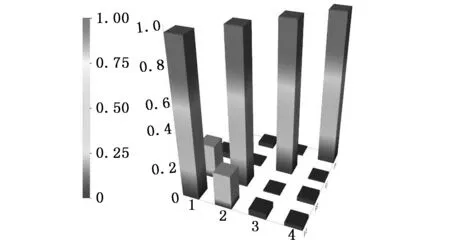
ωn1=9.12 Hz ωn2=55.59 Hz ωn3=151.85 Hz ωn4=310.31 Hz圖10 模態分析模型驗證Fig.10 Model verification for modal analysis
根據圖7所示的頻率擬合誤差可以看出,頻率擬合曲線對一階模態具有較高的精度,根據實驗得到的一階頻率,選取彈性約束剛度k=1.0×104N/m進行分析。代入式(27)計算得輕型操作臂的前三階頻率分別為10.4498 Hz、51.0843 Hz、146.0061 Hz。圖11所示為輕型操作臂模態頻率誤差,圖中的百分數為不同約束模型所對應的頻率分析誤差。由圖11可以看出,根據結合部彈性約束模型得到的前三階頻率與實驗結果較為吻合,彈性約束模型誤差明顯小于理想固定約束假設模型。且隨著頻率階數的增大,理想固定約束模型的誤差逐漸增大,而彈性約束模型誤差逐漸減小,即對高階模態而言,彈性約束模型分析精度更高,驗證了本文建立的結合部彈性約束模型的正確性和合理性。
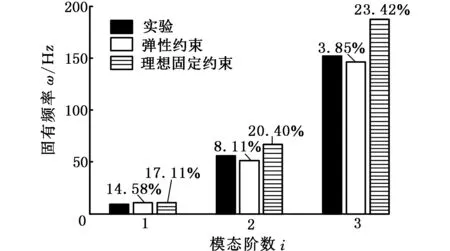
圖11 輕型操作臂模態頻率分析誤差Fig.11 Frequencies error analysis for the flexible manipulator
為進一步分析結合部彈性約束下輕型操作臂的動態特性,基于模態測試實驗裝置進行振動測試實驗。實驗時采用力錘對測點5進行激勵,同時采集力錘的激勵信號和測點3(拾振點)的振動信號,可得輕型操作臂的初始振動加速度幅值為98.66 m/s2,實驗過程中在阻尼作用下逐步衰減,如圖12所示。由式(25)所得的振動位移方程計算可知,在激勵作用下輕型操作臂的振動加速度幅值為96.31 m/s2,如圖13所示。與實驗結果誤差為2.38%,說明基于彈性約束模型分析輕型操作臂彈性約束系統的動態特性是可行的。
3 結論
(1)結合部的彈性約束效應對輕型操作臂的動力學特性具有重要影響,若將其視為理想的剛性約束,將導致分析結果存在誤差甚至錯誤,在分析系統的動力學特性時應充分考慮結合部的彈性約束作用。
(2)建立的彈性約束模型能夠合理表征結合部的彈性約束作用,尤其對高階模態的分析精度較高,實驗結果驗證了彈性約束模型的正確性。
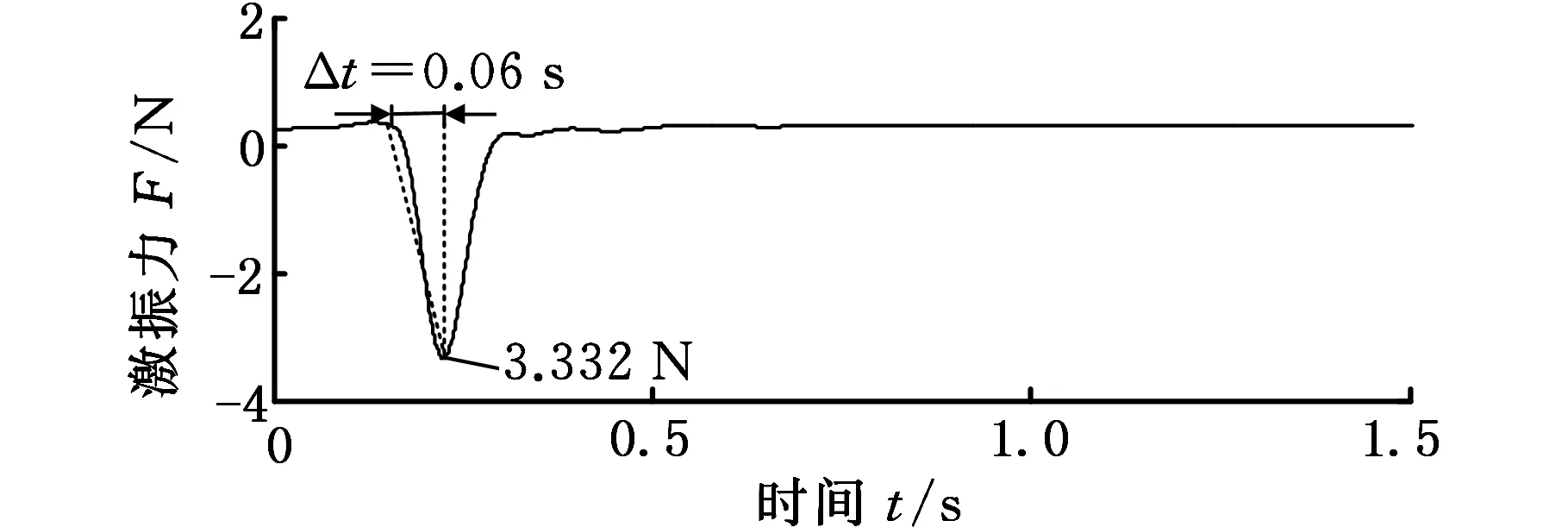
(a)激勵信號
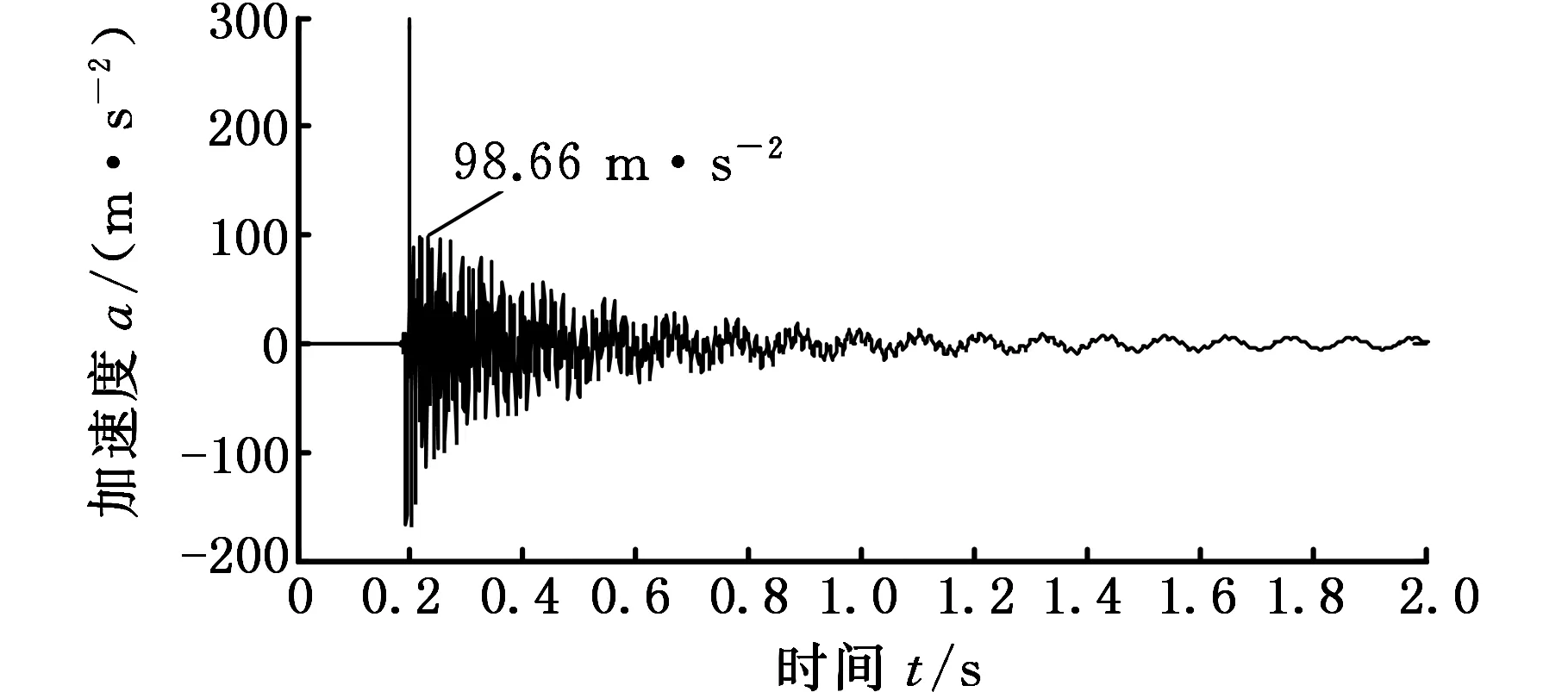
(b)振動加速度圖12 力錘激勵信號和振動加速度響應Fig.12 Force hammer excitation signal and vibration acceleration response
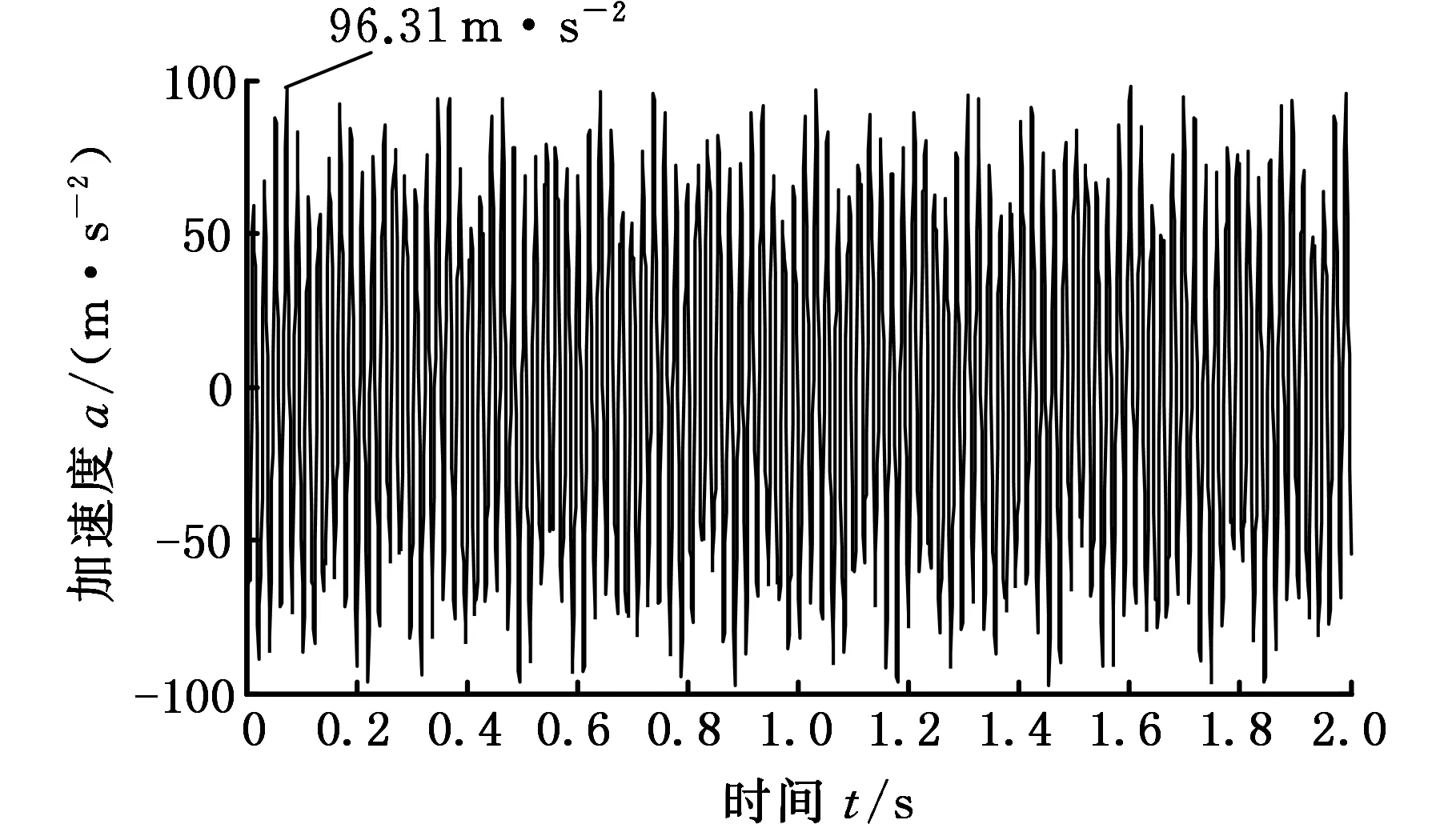
圖13 輕型操作臂的振動加速度理論結果Fig.13 The theoretical results of vibration acceleration of the flexible manipulator
(3)輕型操作臂的頻率與結合部的約束剛度具有一定關系,在彈性約束區域內,頻率與約束剛度之間具有冪函數關系特征,并通過曲線擬合可得到頻率與結合部約束剛度的關系方程,所得擬合方程對前兩階模態的分析結果誤差分別小于0.08%和0.45%。
(4)研究了結合部彈性約束效應對輕型操作臂系統的動態特性的影響規律,所得結果可指導輕型操作臂的關節特征識別、設計優化和振動抑制,這將是后續深入研究的內容。同時,本文重點是分析輕型操作臂彈性約束系統的動力學特性,沒有考慮系統阻尼因素,在后續研究中也將考慮系統阻尼尤其是結構阻尼對系統特性的影響。
[1] 金鵬,劉建新,史素敏.拋光直角坐標機器人控制系統設計[J].機械設計與制造,2013(9):200-202.
JIN Peng, LIU Jianxin, SHI Sumin.Design of Control System for Polishing Cartesian Coordinate Robot [J]. Machinery Design and Manufacture,2013(9):200-202.
[2] 趙言正,付莊,曹其新,等.空間太陽電池封裝機器人[J].上海交通大學學報,2005,39(6):888-891.
ZHAO Yanzheng, FU Zhuang, CAO Qixin, et al. A Space Solar Cell Bonding Robot [J]. Journal of Shanghai Jiaotong University,2005,39(6):888-891.
[3] 王田苗,陶永.我國工業機器人技術現狀與產業化發展戰略[J].機械工程學報,2014,50(9):1-13.
WANG Tianmiao, TAO Yong. Research Status and Industrialization Development Strategy of Chinese Industrial Robot [J]. Journal of Mechanical Engineering,2014,50(9):1-13.
[4] 雷源忠. 我國機械工程研究進展與展望[J].機械工程學報,2009,45(5):1-11.
LEI Yuanzhong. Recent Research Advances and Expectation of Mechanical Engineering Science in China [J]. Journal of Mechanical Engineering,2009,45(5):1-11.
[5] DWIVEDY S K, EBERHARD P. Dynamic Analysis of Flexible Manipulators, a Literature Review [J].Mechanism and Machine Theory,2006,41(7):749-777.
[6] RAHIMI H N, NAZEMIZADEH M. Dynamic Analysis and Intelligent Control Techniques for Flexible Manipulators: a Review [J].Advanced Robotics,2014,28(2):63-76.
[7] HURLEBAUS S, GAUL L. Smart Structure Dynamics [J].Mechanical Systems and Signal Processing,2006,20:255-281.
[8] ZHAO J L, YAN S Z, WU J N. Analysis of Parameter Sensitivity of Space Manipulator with Harmonic Drive Based on the Revised Response Surface Method[J]. Acta Astronautica,2014,98:86-96.
[9] MAHMOODI S, AHMADIAN M. Modified Acceleration Feed-back for Active Vibration Control of Aerospace Structures [J]. Smart Materials & Structures,2010,19(6):065015.
[10] WANG F Y, GAO Y Q. Advanced Studies of Flexible Robotic Manipulators: Modeling, Design, Control, and Applications [M]. Singapore: World Scientific,2004.
[11] 劉玉飛,李威,楊雪鋒,等.彈性關節柔性操作臂的頻率及振型特性分析[J].中國機械工程,2015,26(7):954-959.
LIU Yufei, LI Wei, YANG Xuefeng, et al. Natural Frequencies and Modal Shape Characteristics of a Flexible Manipulator with Elastic Joints[J].China Mechanical Engineering,2015,26(7):954-959.
[12] LIU Yufei, LI Wei, WANG Yuqiao, et al. Dynamic Model and Vibration Power Flow of a Rigid-flexible Coupling and Harmonic-disturbance Exciting System for Flexible Robotic Manipulator with Elastic Joints[J].Shock and Vibration,2015,2015:1-10.
[13] 梅鳳翔.分析力學[M].北京:北京理工大學出版社,2013.
MENG Fengxiang. Analytical Mechanics[M]. Beijing: Beijing Institute of Technology Press,2013.
[14] SINGIRESU S R. Mechanical Vibration, 5th edition [M]. New York: Pearson Education Inc.,2011.
DynamicsPropertiesandExperimentalInvestigationsforLightManipulatorswithElasticRestraintJoints
LIU Yufei1,3ZHANG Xi2,3LI Wei3XU Dezhang1
1.School of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu,Anhui,241000 2.Engineering Research and Training Center, Anhui Polytechnic University, Wuhu,Anhui,241000 3.School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou,Jiangsu,221116
The dynamics properties of flexible manipulator systems with elastic restraint joints were investigated. Firstly, an elastic restraint model with the linear restraints was established, and then, the frequency equation was subsequently derived. Secondly, based on the established elastic restraint model and Hamilton principle, the vibration displacement equation was derived. Finally, the dynamics properties of the flexible manipulator elastic restraint systems were analyzed using theoretical simulation and experimental approach, and the influence mechanism of elastic restraints on the dynamics were revealed. The results show that the established model may describe the elastic restraints of joints, particularly for higher order modes. Moreover, in the defined elastic restraint regions, the relationship of the frequency and the restraint stiffness has the characteristics of power function, and the fitting errors for the first two order frequencies are small than 0.08% and 0.45%, respectively, and the analysis errors for the vibration displacements are as 2.38%, which were verified experimentally.
light manipulator; joint; elastic restraint; dynamics
TH112;TH113.1
10.3969/j.issn.1004-132X.2017.23.004
2017-01-09
國家自然科學基金資助項目(51305444);安徽高校自然科學研究項目(KJ2017A118);安徽省科技攻關計劃資助項目(1604a0902125、1604a0902183);蕪湖市科技計劃資助項目(2016cxy03);安徽工程大學大學引進人才科研啟動基金資助項目(2016YQQ012)
(編輯胡佳慧)
劉玉飛,男,1988年生。安徽工程大學機械與汽車工程學院講師,中國礦業大學機電工程學院博士。主要研究方向為機器人系統動力學與控制。發表論文10余篇。E-mail:liuyufeiahpu@126.com。張席,女,1991年生。安徽工程大學工程研發與訓練中心講師,中國礦業大學機電工程學院碩士。李威,男,1964年生。中國礦業大學機電工程學院教授、博士研究生導師。許德章,男,1964年生。安徽工程大學機械與汽車工程學院教授。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39