寶馬雙離合器變速器電控系統介紹
2017-12-05 04:51:22陳曉霞周曉飛
汽車電器 2017年11期
關鍵詞:系統
陳曉霞,周曉飛
(1. 河北省機電工程技師學院,河北 張家口 075000;2.石家莊創業汽車技術研究中心,河北 石家莊 050000)
寶馬雙離合器變速器電控系統介紹
陳曉霞1,周曉飛2
(1. 河北省機電工程技師學院,河北 張家口 075000;2.石家莊創業汽車技術研究中心,河北 石家莊 050000)
1 雙離合器變速器簡介
寶馬雙離合器變速器(DKG)用于E90M、E92M、E93M等車型上,其變速器型號為GS7D36SG,它結合了順序擋換擋變速器(SMG)與自動變速器的優點。與SMG一樣,它可以在自動換擋模式“前進擋”和手動換擋模式“順序換擋”下使用。雙離合器結構示意如圖1所示。

圖1 雙離合器內部結構
變速器控制由DKG電子系統負責,功能執行由DKG液壓系統負責。這些系統組成一個機械電子模塊且集成在變速器內。
雙離合器變速器特點如下:①液壓操縱式雙離合器(所謂的濕式離合器);②集成式機械電子模塊,由DKG電子系統和DKG液壓系統組成;③內部直接潤滑;④特殊機油冷卻循環回路;⑤新型M DKG選擋開關(M DKG,名稱前的字母M區分普通DKG特殊信息和MDKG特殊信息);⑥自動駐車鎖;⑦長度針對DKG調整的傳動軸(較短);⑧全可變M差速器鎖,傳動比改為3.154(非DKG為 3.846),殼體端蓋進行了調整。
2 雙離合器變速器工作原理
從結構上看,DKG由兩個子變速器構成,每個子變速器都帶有一個離合器。離合器1與子變速器1連接,離合器2與子變速器2連接。DKG工作原理簡圖如圖2所示。

圖2 DKG 工作原理簡圖
子變速器1包含擋位 1/3/5/7/R,子變速器2包含擋位2/4/6。這意味著無論是換高擋還是換低擋(R擋除外),下一個擋位始終位于另一個子變速器上。
以當前擋位(例如在子變速器1上)加速期間,變速器提前掛入位于子變速器2上的下一個擋位。隨后進行換擋時,可以通過有針對性地控制離合器在牽引力不中斷的情況下,迅速將驅動力從子變速器1傳遞到子變速器2。因此在提供牽引力和換擋舒適性方面優勢非常明顯。同時,在保留了手動變速器優點(例如與發動機直接連接)的情況下,DKG結合了自動變速器牽引力和舒適性方面的優點。
3 車載網絡
3.1 車載網絡接口
圖3為M DKG變速器電子控制系統與M選擋開關的聯網情況和至E9*M3車載網絡的接口示意圖。
3.2 車載網絡概覽
E9xM3車載網絡增加了M雙離合器變速器方面的功能,車載網絡概覽見圖4。
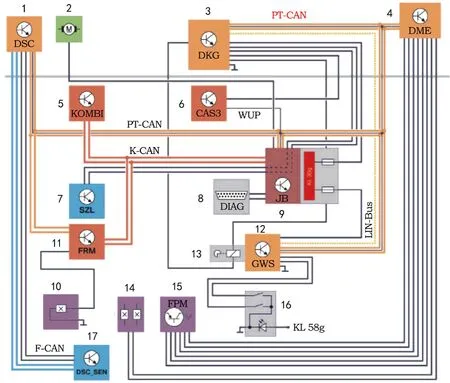
圖3 M DKG 車載網絡接口系統電路圖

圖4 E9xM3 M DKG車載網絡概覽
4 機械電子模塊
4.1 機械電子模塊結構
集成在DKG變速器殼體內的機械電子模塊,由DKG電子系統和DKG液壓系統組成。
換擋撥叉軸行程傳感器直接固定在DKG電子系統上(圖5b)。上部行程傳感器內集成有用于內部輸入軸1和2的轉速傳感器。駐車鎖傳感器集成在倒數第2個行程傳感器內(圖5b)。

圖5 機械電子模塊
8個擋位通過4個液壓缸和4個獨立換擋撥叉軸掛入。換擋撥叉軸位置由換擋撥叉軸傳感器以非接觸方式探測(圖6)。

圖6 DKG系統機械電子模塊
4.2 傳感器系統和通信
4.2.1 傳感器
雙離合器變速器包含帶轉動方向識別功能的變速器軸1轉速傳感器、不帶轉動方向識別功能的變速器軸2轉速傳感器、離合器1和2的離合器油壓力傳感器、3個溫度傳感器(1個用于噴出的離合器油,2個冗余溫度傳感器用于DKG電子系統)、4個用于傳輸換擋撥叉軸位置的線性傳感器、1個雙(冗余)駐車鎖傳感器等傳感器,安裝在變速器內,傳感器信號直接發送至DKG電子系統內,其工作原理如圖7所示。

圖7 DKG工作原理圖(帶離合器、軸、DKG電子系統和傳感器)
系統還通過一個復雜的溫度模型計算油底殼溫度,并借助離合器噴油溫度和DKG電子系統溫度進行驗證。
4.2.2 轉矩干預
4.2.3 LIN總線模塊
為了實現與選擋開關(GWS)的冗余通信,除了PTCAN模塊外,DKG電子系統內還有一個LIN總線模塊。
5 M選擋開關(M GWS)
5.1 選擋開關
E9x M3的雙離合器變速器有1個M專用選擋開關。其操作與帶順序換擋M變速器(SMG)的E6x M5/M6類似。
M GWS由帶顯示的選擋桿、帶控制單元的殼體和以電氣方式連接的外部駕駛邏輯模式選擇按鈕組成,DKG M選擋開關見圖8。
5.2 選擋桿:顯示和功能
1.3.6 PPCI術后3月,患者復查超聲心動圖,了解心功能情況,記錄左室射血分數(left ventricle ejection fration,LVEF);觀察LVEF>50%的發生率。
選擋桿上的換擋示意/行駛模式/選擋顯示與帶SMG的E6x M5/M6類似。區別如下:E92 M3選擋桿不再卡止在2個選擋桿位置N和R,而是只卡止在R位置。M GWS 選擋桿為單穩態。這意味著向前、向后、向右或向左移動后選擋桿自動返回其初始位置,倒車擋除外。在此選擋桿向左側卡止在選擋桿位置R處,必須由駕駛員移回到初始位置。根據選擋桿操縱情況和行駛模式,換擋示意/行駛模式/換擋顯示背景呈紅色。

圖8 DKG M選擋開關(M GWS)
這種顯示方式能準確顯示當前選擇的行駛模式和換擋可能性。
該顯示由定向照明(用于照亮換擋)和功能照明組成。處于不同位置的紅色LED顯示當前選擇的行駛模式和換擋可能性。M GWS內的功能照明由DKG電子系統控制。
系統監控功能照明。為此DKG電子系統讀取顯示信息并將其與所要求的顯示內容進行對比。
為了實現與DKG電子系統的冗余通信,除PT-CAN總線模塊外,M GWS內安裝了一個LIN總線模塊。
5.2.1 選擋桿基本位置(單穩態)
除了卡止位置R外,選擋桿始終位于單穩態選擋桿基本位置。起動發動機時,駐車鎖始終處于掛入狀態且離合器處于無壓力分離狀態。無論在哪個擋位下關閉了發動機,是否踩下/啟用了腳制動器,都可以起動發動機。在選擋桿基本位置處選擋桿顯示背景呈紅色(圖9a)。
5.2.2 行駛模式前進擋D(自動換擋模式)
首次將選擋桿短促向右推移時,就會啟用前進擋D,此后 DKG 在自動換擋模式下自動換到第1或第2擋。除了選擋桿基本位置外,在選擋桿顯示內D/S背景也呈紅色(圖9b)。
5.2.3 行駛模式S(順序換擋模式)
第2次短促向右推移時,DKG從自動換擋切換到順序換擋模式S。
每向右推移選擋桿1次,DKG就會在順序換擋與自動換擋模式之間切換1次。如果在 2 擋至 6 擋下行駛時選擇行駛模式S,則除D/S外,符號“+”和“-”背景也呈紅色(圖9c)。
現在駕駛員可以通過向后操縱選擋桿換到較高一擋,或通過向行駛方向操縱來換低擋。駕駛員給出的換擋要求始終在允許的轉速范圍內執行。達到最高轉速時不會自動換高擋(例外:快速起步控制)。
只要在自動換擋模式下向前或向后推移選擋桿,或者操作轉向盤上的換擋翹板開關,M DKG就會切換到順序換擋模式。
在順序換擋模式下有2個附加顯示,一個用于1擋,另一個用于7擋。在1擋下符號“-”的背景不再為紅色,因為此時無法繼續換低擋(圖9d)。
在7擋下符號“+”的背景則不再為紅色,因為此時無法繼續換高擋(圖9e)。
5.2.4 空擋N
駕駛員也可以有意識換到空擋,方法是短促向左推移選擋桿。在選擋桿顯示內符號N背景呈紅色(圖9f)。在自動洗車設備內洗車時需換到空擋。
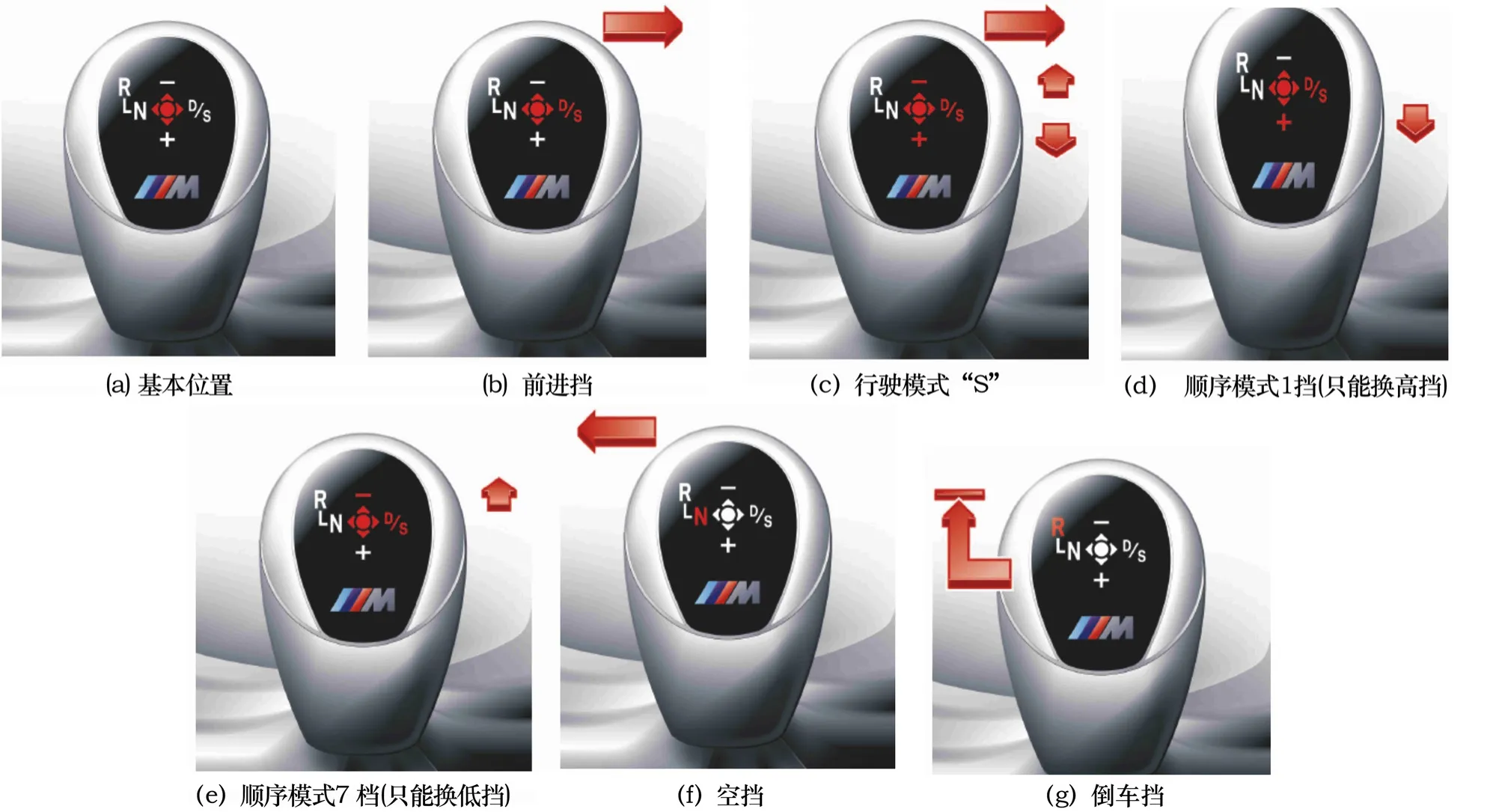
圖9 D KG GWS各擋位示意圖
5.2.5 選擇擋位倒車擋“R”
掛入倒車擋后,在這個卡止位置下符號R背景呈紅色(圖9g)。如果處于卡止的選擋桿位置R時起動發動機,選擋桿基本位置按1 Hz頻率以紅色閃爍。其目的是提醒駕駛員,倒車擋處于掛入狀態,駕駛員必須將選擋桿移回到基本位置,以便選擇一個新擋位或行駛模式。
5.3 駕駛邏輯模式選擇
其操作和顯示與 SMGⅡ和SMGⅢ相同。通過駕駛邏輯模式選擇開關,可選擇順序換擋模式下的6個換擋模式和自動換擋模式下的5個換擋模式。所選換擋模式在組合儀表中以條形圖方式顯示。
在順序換擋模式下會影響換擋速度,因此直接影響換擋軟硬度。只有停用DSC功能后才能選擇第6個換擋模式。
此后可以使用快速起步控制功能。在自動換擋模式下,會影響換擋時機和換擋速度。較高的換擋模式意味著較高的換擋轉速和換擋速度。換擋時機在很大程度上還取決于加速踏板位置和移動速度。
5.4 傳感器系統
選擋桿位置由霍爾傳感器以非接觸方式探測。傳感器通常為2~4組,其布置如圖10所示。總共14個霍爾傳感器(GWS SMG Ⅱ4,GWS SMG Ⅲ8)。因此可保證最大的故障處理和診斷能力。
5.5 DKG的接口

圖10 M GWS 選擋桿位置霍爾傳感器布置
為確保始終可供使用,選擋桿位置信號通過PTCAN和LIN總線進行傳輸。因此即使2個通信線路中的一個失靈時,也可以將信號發送給DKG。M GWS通過PTCAN喚醒導線上的高電平來喚醒。M GWS本身不具有主動喚醒能力。只要在PT-CAN上或LIN總線上總線通信處于啟用狀態,選擋桿上的顯示就會處于啟用狀態。
6 電氣故障
1)變速器內部故障/傳感器、閥門信號不可信和超出限值,如表1所示。
2) 制動器、駐車鎖和選擋開關(GWS)有故障/不可信,如表2所示。
3) 無效總線信息如表3所示。

表1 變速器內部故障/傳感器、閥門不可信和超出限值
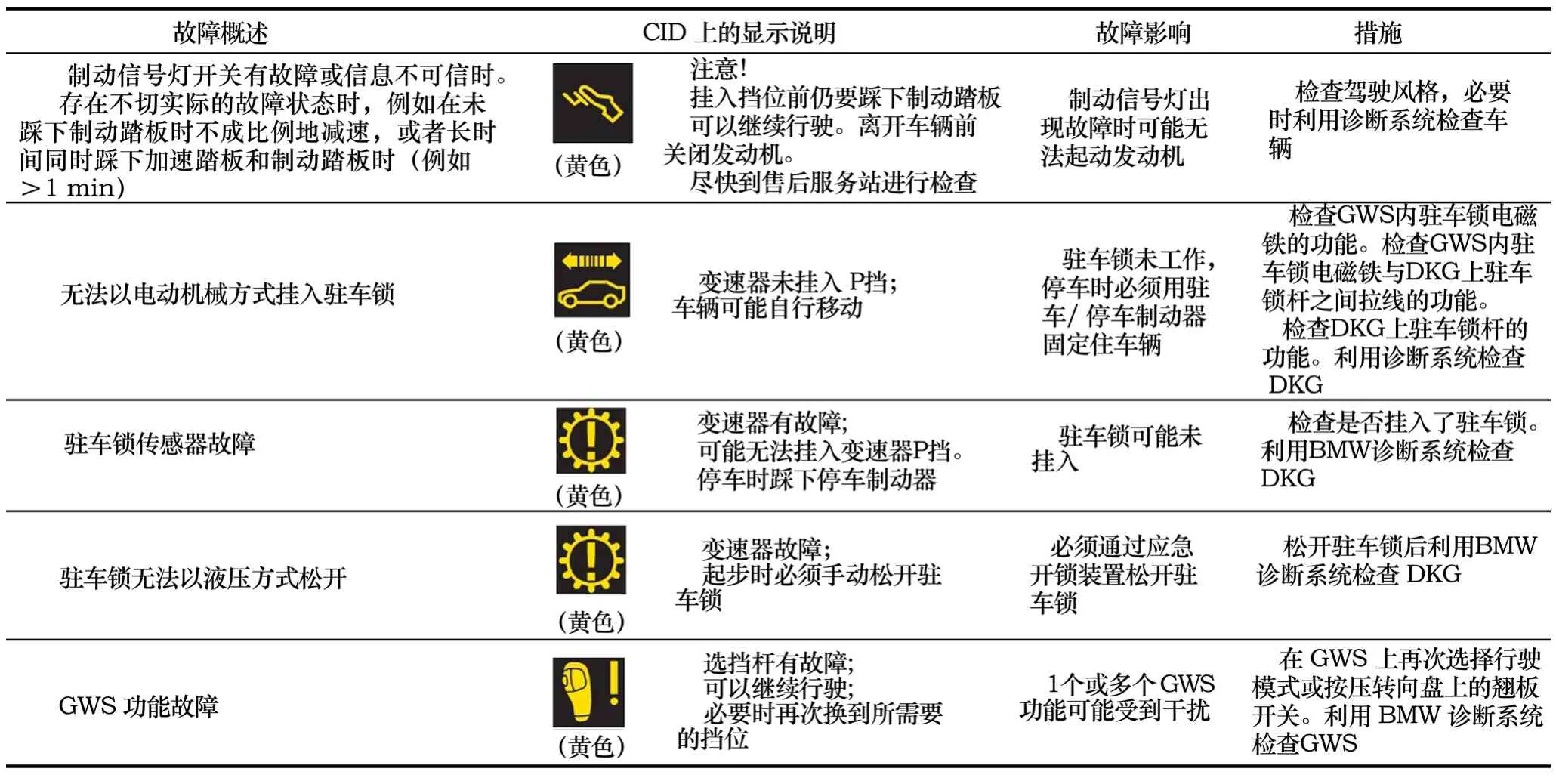
表2 制動器、駐車鎖和選擋開關(GWS)有故障/不可信

表3 無效總線信息
(編輯 心 翔)
征集汽車智能技術稿件
當前全球汽車行業正處在工業4.0時代,以智能制造為主導,通過充分利用信息通訊技術和網絡空間虛擬系統和信息物理系統相結合的手段,將制造業向智能化轉型。
早在20世紀70年代,美歐等發達國就已經開始進行無人駕駛智能汽車的研究,進入21世紀后,智能汽車的前2個層次“輔助駕駛技術”和“半自動駕駛技術”已經得到廣泛應用,并成為提升產品檔次和市場競爭力的重要手段。輔助駕駛技術包括自主式輔助駕駛技術和協同式輔助駕駛技術兩種,通過警告讓駕駛員防患車禍于未然。其中,包括前碰撞預警FCW、車道偏離預警LDW、車道保持系統LKS、自動泊車輔助APA等在內的自主式輔助駕駛技術已經得到廣泛應用,處于普及推廣階段,并由豪華車下沉至B級車。汽車輔助駕駛技術成為獲取E-NCAP四星和五星的必要條件。在美國、歐洲、日本等汽車發達國家和地區,基于車聯網V2I/V2V技術的協調式輔助駕駛技術正在進行實用性技術開發和大規模試驗場測試。半自動駕駛技術在高端車上逐漸獲得應用,比如已經獲得廣泛應用的自適應巡航控制系統ACC。
世界汽車巨頭們正致力于第3層次“高度自動駕駛技術”的實用化研發和產業化,即將實現量產上市。沃爾沃將率先量產全球第一個自動駕駛技術——堵車輔助系統。該系統是自適應巡航控制和車道保持輔助系統的集成與延伸,它可以使汽車在車流行駛速度低于50 km/h的情況下,自動跟隨前方車輛行進。此外,奧迪、凱迪拉克、日產、豐田等都計劃推出諸如自動轉向、加減速、車道引導、自動停車、自適應巡航控制等技術的汽車,它們大多屬于第3層次的智能駕駛技術。
我國從20世紀80年代開始著手無人駕駛汽車的研制開發,雖與國外相比還有一些距離,但也取得了階段性成果。國內中國科學院合肥研究院、清華大學、國防科技大學、上海交通大學、西安交通大學、吉林大學、同濟大學、天津軍交學院、中國汽車技術研究中心等都參與過無人駕駛汽車的研究項目。
《汽車電器》將重點推出汽車智能技術版塊,期望廣大的科研人員能夠就智能傳感技術、智能公交系統、影音娛樂、車輛防盜、車輛追蹤、多車互動、異常預警、遠程指導等方面踴躍投稿,展示最新科研成果,與同行進行技術交流,共同推動我國智能汽車的全面發展。稿件需密切聯系實際,深入淺出,全文字數含圖表控制在8 000字以內。此類稿件優先刊登。
投稿信箱:qcdq@qcdq.cn ??郵件主題注明“智能技術”
咨詢電話:0731-82798408 http://www.qcdq.cn
《汽車電器》雜志社
U463.5
B
1003-8639(2017)11-0077-06
2017-01-04;
2017-01-22
陳曉霞,女,講師,碩士,從事電子電工方向教學與研究工作;周曉飛,男,石家莊市青年崗位能手,從事汽車應用與維修技術研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
