基于時(shí)空特征的航拍視頻運(yùn)動(dòng)目標(biāo)檢測研究
2017-12-02 13:59:40劉雙嶺
軟件導(dǎo)刊 2017年11期
劉雙嶺
摘要:航拍視頻具有監(jiān)控場景范圍大、采集設(shè)備移動(dòng)迅捷等優(yōu)點(diǎn)。與普通監(jiān)控視頻相比,航拍具有目標(biāo)分辨率低、場景干擾因素多、采集設(shè)備不固定等問題,運(yùn)動(dòng)目標(biāo)檢測是個(gè)難題。針對(duì)這些問題,提出一種融合時(shí)空特性的兩級(jí)運(yùn)動(dòng)目標(biāo)檢測算法。首先利用SURF算子完成圖像匹配,解決攝像機(jī)移動(dòng)問題,并結(jié)合目標(biāo)的運(yùn)動(dòng)特性及自適應(yīng)道路檢測算法完成時(shí)域上的目標(biāo)區(qū)域檢測;采用HSV空間中的S分量圖顏色特征,利用道路區(qū)域與目標(biāo)區(qū)域的差異性完成空域目標(biāo)區(qū)域檢測。實(shí)驗(yàn)采用著名的VIVID Egtest01數(shù)據(jù)庫以及Munich Crossroad01數(shù)據(jù)庫中的數(shù)據(jù),并與傳統(tǒng)方法進(jìn)行對(duì)比。結(jié)果顯示該算法平均準(zhǔn)確率達(dá)到93%,相比于傳統(tǒng)方法有效性和魯棒性更好。
關(guān)鍵詞關(guān)鍵詞:航拍視頻;背景補(bǔ)償;道路檢測;HSV;運(yùn)動(dòng)目標(biāo)
DOIDOI:10.11907/rjdk.171850
中圖分類號(hào):TP319
文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào)文章編號(hào):16727800(2017)011014405
0引言
航拍是目前新興的一種非接觸式遠(yuǎn)距離探測技術(shù),具有拍攝場景范圍大、移動(dòng)便攜等優(yōu)勢,逐漸應(yīng)用于智能交通系統(tǒng)的運(yùn)動(dòng)目標(biāo)檢測[13]。運(yùn)動(dòng)信息是目標(biāo)檢測最為重要的線索,大部分是基于時(shí)間特性的,在固定攝像頭條件下,常用的運(yùn)動(dòng)目標(biāo)檢測算法有背景差分法、幀差法、光流法等。但是這些方法一般不能直接應(yīng)用在移動(dòng)機(jī)器人、無人機(jī)等場合,這是因?yàn)閿z像頭的運(yùn)動(dòng)使背景變得復(fù)雜,導(dǎo)致不能精確檢測出運(yùn)動(dòng)目標(biāo)。
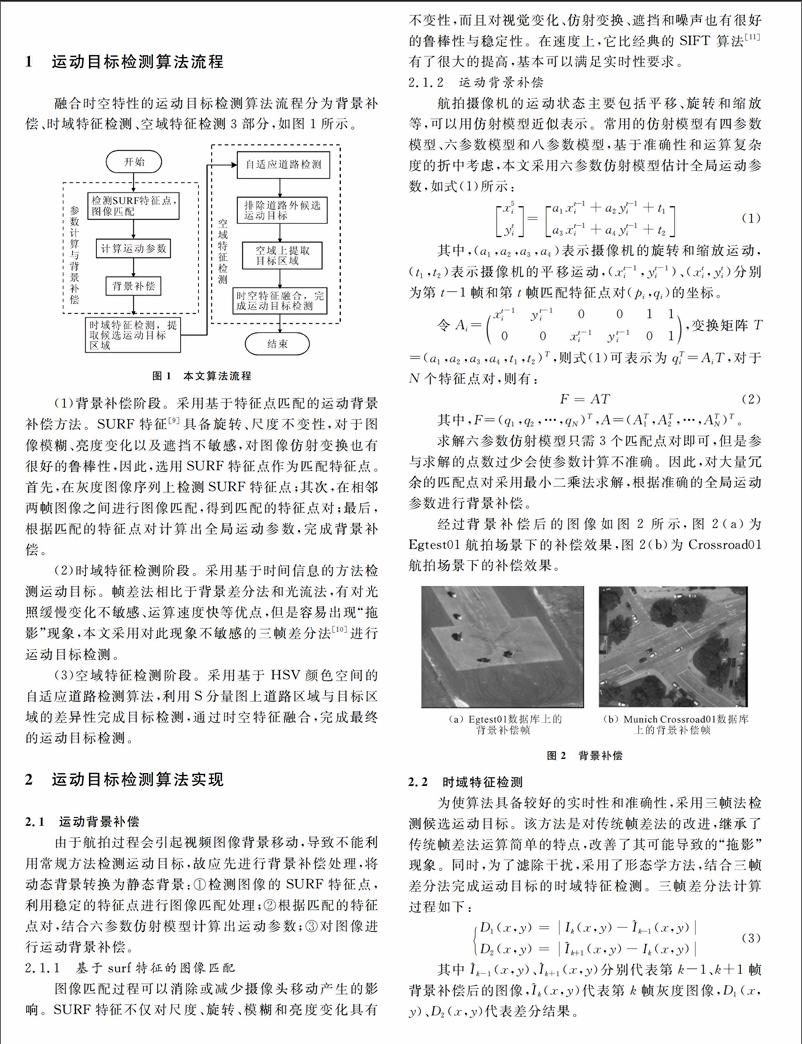
運(yùn)動(dòng)目標(biāo)檢測相關(guān)研究已經(jīng)有一些成果[46]:①基于光流場的運(yùn)動(dòng)目標(biāo)檢測法[7]:根據(jù)運(yùn)動(dòng)目標(biāo)的運(yùn)動(dòng)矢量在局部區(qū)域的統(tǒng)一性以及背景和運(yùn)動(dòng)目標(biāo)之間的差異性,對(duì)其進(jìn)行運(yùn)動(dòng)分割,此方法缺點(diǎn)是抗噪能力弱且實(shí)時(shí)性較差;②基于統(tǒng)計(jì)模型的運(yùn)動(dòng)目標(biāo)檢測法[8]:這種算法首先估算運(yùn)動(dòng)矢量場,然后根據(jù)馬爾可夫隨機(jī)場(MRF)建立運(yùn)動(dòng)矢量場的間斷點(diǎn)分布模型,據(jù)此模型檢測運(yùn)動(dòng)矢量場的間斷點(diǎn),從而提取出運(yùn)動(dòng)目標(biāo)。該方法的優(yōu)點(diǎn)是運(yùn)算量比較小,能滿足實(shí)時(shí)性要求,缺點(diǎn)是在復(fù)雜場景下檢測率下降、魯棒性較差;③基于背景補(bǔ)償?shù)倪\(yùn)動(dòng)目標(biāo)檢測法:這是目前最常用的一種方法。該方法首先對(duì)相鄰兩幀圖像進(jìn)行圖像匹配,然后根據(jù)匹配的特征點(diǎn)計(jì)算出全局運(yùn)動(dòng)參數(shù),依據(jù)運(yùn)動(dòng)參數(shù)完成背景補(bǔ)償,從而將動(dòng)態(tài)背景轉(zhuǎn)變?yōu)殪o態(tài)背景進(jìn)行處理。
2.3空域目標(biāo)檢測
經(jīng)過時(shí)域特征檢測,可得到運(yùn)動(dòng)目標(biāo)的候選區(qū)域,但是此候選區(qū)域可能是由不精確的背景補(bǔ)償或其它干擾引起的。為提高算法準(zhǔn)確率,本文在此基礎(chǔ)上進(jìn)行空域上的目標(biāo)檢測。采用基于HSV顏色空間的自適應(yīng)檢測方法得出道路區(qū)域,將道路區(qū)域外的候選運(yùn)動(dòng)目標(biāo)認(rèn)定為噪聲,以減少周圍環(huán)境的干擾。S分量對(duì)于光照不敏感,利用目標(biāo)在此分量上的顏色特征完成空域目標(biāo)區(qū)域分割。
2.3.1自適應(yīng)道路檢測
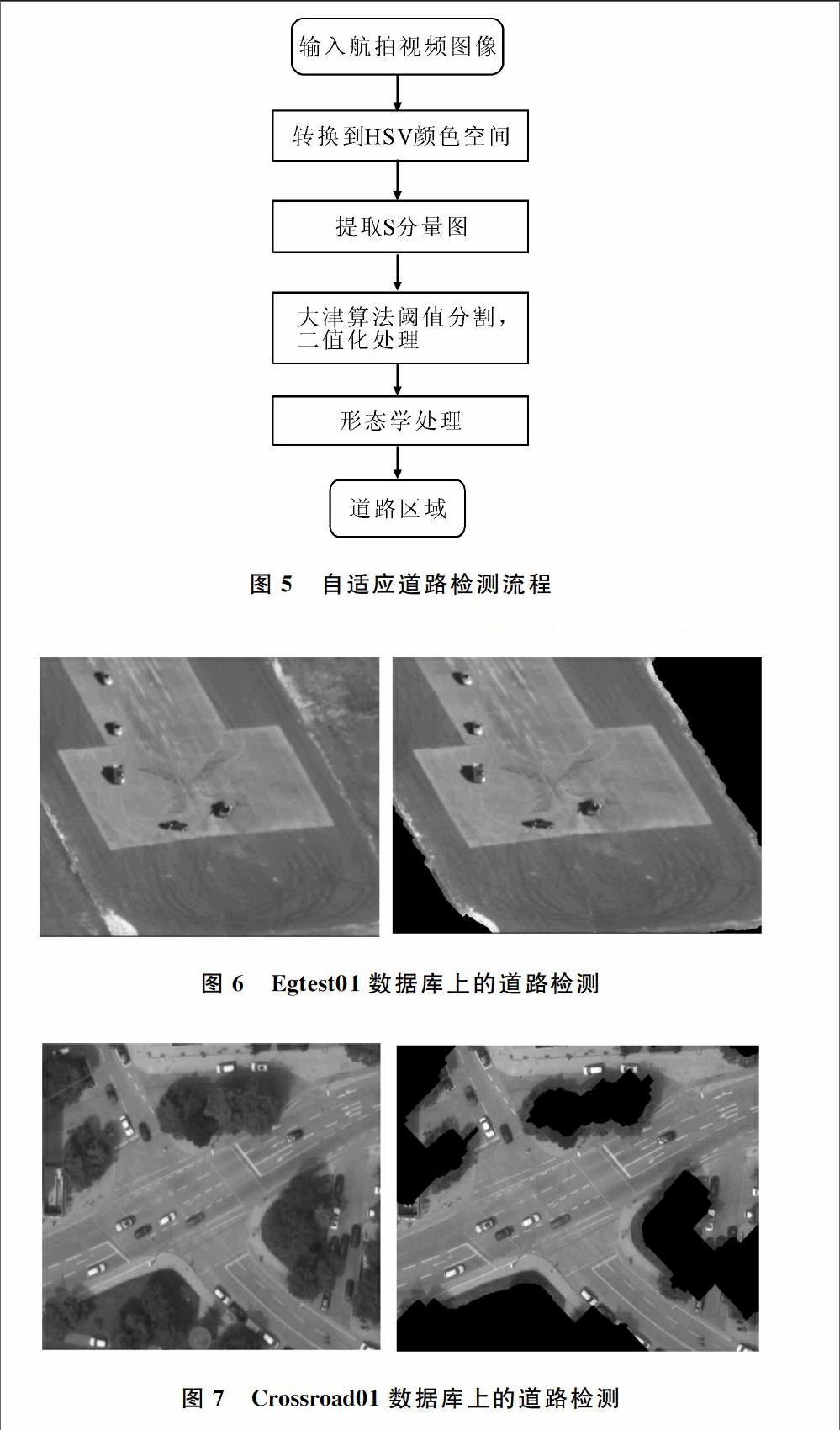
考慮到航拍視頻圖像背景復(fù)雜,同時(shí)為了降低虛警率,本文將感興趣區(qū)域設(shè)為道路區(qū)域。通常情況下,運(yùn)動(dòng)目標(biāo)只位于這部分區(qū)域。與基于先驗(yàn)知識(shí)的方法不同,本文采用一種自適應(yīng)方法進(jìn)行道路提取,流程如圖5所示。
圖5自適應(yīng)道路檢測流程
首先將圖像轉(zhuǎn)換為HSV顏色空間,在S分量圖上進(jìn)行道路提取。在此分量圖上,道路區(qū)域與其它區(qū)域灰度差別明顯。然后利用大津算法[12]結(jié)合形態(tài)學(xué)處理方法對(duì)道路區(qū)域進(jìn)行分割,道路分割結(jié)果如圖6、圖7所示。
從圖6、圖7可以看出,無論是利用場景簡單的VIVID Egtest01數(shù)據(jù)庫還是場景復(fù)雜的Munich Crossroad01數(shù)據(jù)庫,該方法都能很好地提取道路區(qū)域,提高算法效率與魯棒性。
2.3.2空間特征檢測
由于可能存在噪聲干擾,單一的時(shí)域特征并不能很好地把運(yùn)動(dòng)目標(biāo)檢測出來,因此本文在時(shí)域目標(biāo)檢測的基礎(chǔ)上進(jìn)行空域目標(biāo)檢測。在S分量圖上道路區(qū)域與目標(biāo)區(qū)域差異較大,據(jù)此差異性將目標(biāo)與道路區(qū)域分離,得到空域上的目標(biāo)區(qū)域,計(jì)算公式如下:
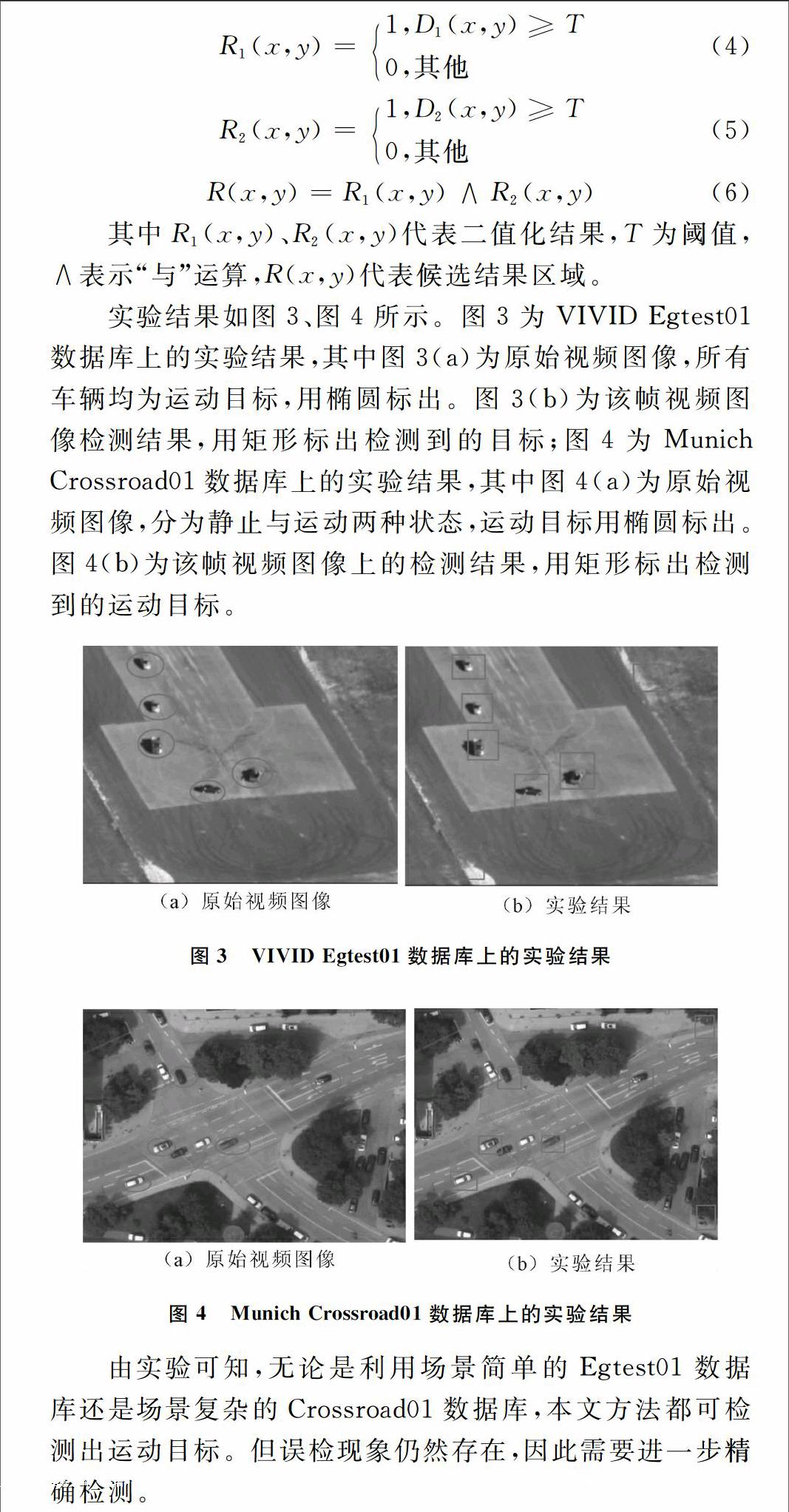
B(x)=1,S(x,y)≥T0,S(x,y) 其中,B(x)為閾值比較函數(shù),T代表閾值,S(x,y)為S分量圖的灰度值。 將二值圖中值為1的區(qū)域判定為候選目標(biāo)區(qū)域,結(jié)合形態(tài)學(xué)處理方法得出空域上的最終目標(biāo)區(qū)域,實(shí)驗(yàn)效果如圖8、圖9所示。 圖8VIVID Egtest01數(shù)據(jù)庫上的實(shí)驗(yàn)結(jié)果 圖9Munich Crossroad01數(shù)據(jù)庫上的實(shí)驗(yàn)結(jié)果 由圖8、圖9可以看出,在VIVID Egtest01數(shù)據(jù)庫上,運(yùn)動(dòng)車輛全部被檢測出來,所有車輛均為運(yùn)動(dòng)目標(biāo),故準(zhǔn)確率較高;在Munich Crossroad01數(shù)據(jù)庫上,有靜止和運(yùn)動(dòng)兩種狀態(tài)車輛,還可能會(huì)有其它干擾,準(zhǔn)確率較低,因此有必要進(jìn)一步采取措施使運(yùn)動(dòng)目標(biāo)從道路區(qū)域中分離出來。 2.4時(shí)空特征融合 經(jīng)過時(shí)域特征檢測,可得到運(yùn)動(dòng)目標(biāo)的候選區(qū)域,但是此候選區(qū)域可能由不精確的背景補(bǔ)償或其它干擾所引起。同時(shí),空域上沒有運(yùn)動(dòng)信息,檢測出來的目標(biāo)也可能是多余的噪聲。因此,該算法通過相與的方式對(duì)兩種特征進(jìn)行融合,只有在時(shí)域和空域上均判定為目標(biāo)的區(qū)域,才將其判定為最終運(yùn)動(dòng)目標(biāo)。在兩種數(shù)據(jù)庫上的最終效果如圖10、圖11所示。 圖10Egtest01數(shù)據(jù)庫上最終的運(yùn)動(dòng)目標(biāo)檢測結(jié)果 圖11Crossroad01數(shù)據(jù)庫上最終的運(yùn)動(dòng)目標(biāo)檢測結(jié)果 圖10(a)為Egtest01數(shù)據(jù)庫的原始視頻圖像,圖中所有車輛全部為運(yùn)動(dòng)目標(biāo),用橢圓標(biāo)出。圖10(b)為對(duì)應(yīng)的最終目標(biāo)檢測結(jié)果,用矩形標(biāo)出;圖11(a)為Crossroad01數(shù)據(jù)庫的原始視頻圖像,車輛分為靜止和運(yùn)動(dòng)兩種狀態(tài),運(yùn)動(dòng)車輛用橢圓標(biāo)出。圖11(b)為對(duì)應(yīng)的最終運(yùn)動(dòng)目標(biāo)檢測結(jié)果,用矩形標(biāo)出。由圖10、圖11可以看出,算法經(jīng)過時(shí)空特征融合后,能夠準(zhǔn)確檢測出運(yùn)動(dòng)目標(biāo),具有較好的有效性和魯棒性。
3實(shí)驗(yàn)結(jié)果分析
3.1數(shù)據(jù)庫介紹
該算法采用VIVID EgTest01數(shù)據(jù)庫和Munich Crossroad01數(shù)據(jù)庫進(jìn)行仿真驗(yàn)證。VIVID EgTest01數(shù)據(jù)庫是一個(gè)航拍的視頻圖像序列,背景簡單,周圍環(huán)境噪聲小,經(jīng)常用于航拍視頻中的運(yùn)動(dòng)目標(biāo)檢測,且該數(shù)據(jù)庫中所有車輛均為運(yùn)動(dòng)車輛;Munich Crossroad01數(shù)據(jù)庫是一個(gè)城區(qū)航拍視頻數(shù)據(jù)庫,與EgTest01數(shù)據(jù)庫相比,該數(shù)據(jù)庫最大的區(qū)別在于背景復(fù)雜,且包含運(yùn)動(dòng)和靜止兩種狀態(tài),很難從該數(shù)據(jù)庫中準(zhǔn)確檢測出運(yùn)動(dòng)目標(biāo)。
3.2分析
為驗(yàn)證本文算法的有效性,將其與經(jīng)典的COCOA系統(tǒng)[13]、顯著性檢測算法[14]進(jìn)行對(duì)比。3種方法在VIVID Egtest01數(shù)據(jù)庫和Munich Crossroad01數(shù)據(jù)庫上的對(duì)比結(jié)果如表1所示。
COCOA系統(tǒng)是基于Harris角點(diǎn)作的圖像匹配,該角點(diǎn)特征不具備尺度不變性,當(dāng)圖像尺度發(fā)生較大變化時(shí)不能很好地檢測出運(yùn)動(dòng)目標(biāo)。顯著性檢測方法較COCOA系統(tǒng)有更高的準(zhǔn)確率,但是當(dāng)處于復(fù)雜背景時(shí)易受噪聲干擾,魯棒性較差。本文算法采用基于SURF特征的方式進(jìn)行背景補(bǔ)償,利用顏色特征分割出道路區(qū)域,通過時(shí)空特征融合方式完成運(yùn)動(dòng)目標(biāo)檢測,能夠準(zhǔn)確檢測出運(yùn)動(dòng)目標(biāo)。由表1可以看出,無論是在場景簡單的Egtest01數(shù)據(jù)庫還是在場景復(fù)雜的Crossroad01數(shù)據(jù)庫上,本文算法準(zhǔn)確率均是3種方法中最高的,由此驗(yàn)證了本文方法的有效性和魯棒性。
4結(jié)語
本文提出了一種融合時(shí)空特征的航拍視頻運(yùn)動(dòng)目標(biāo)檢測方法,在時(shí)域上通過運(yùn)動(dòng)信息定位出候選運(yùn)動(dòng)目標(biāo),然后利用自適應(yīng)道路檢測算法分割出道路區(qū)域,完成對(duì)候選運(yùn)動(dòng)目標(biāo)的篩選。在空域上利用顏色特征對(duì)道路區(qū)域中的目標(biāo)區(qū)域進(jìn)行分割,通過相與的方式對(duì)兩者進(jìn)行時(shí)空特征融合,最終完成運(yùn)動(dòng)目標(biāo)的檢測。在真實(shí)的航拍視頻場景下對(duì)該算法進(jìn)行仿真實(shí)驗(yàn),并與其它算法對(duì)比,得出該算法具有較好的有效性和魯棒性的結(jié)論。但是該算法仍有很多不足,例如可能遇到噪聲與運(yùn)動(dòng)目標(biāo)相似的情況時(shí)準(zhǔn)確率會(huì)下降等。未來要在以下兩方面進(jìn)行改進(jìn):①找到一種更為快速有效的方法,使時(shí)域特征的提取更為快速有效;②采用更為有效的空域檢測算法,例如顯著性等,改進(jìn)空域特征的提取。
參考文獻(xiàn)參考文獻(xiàn):
[1]PROKAJ J, MEDIONI G. Persistent tracking for wide area aerial surveillance[C]. IEEE Conference on Computer Vision and Pattern Recognition. IEEE,2014:11861193.
[2]SELVAKUMAR K, JEROME J. Least squares estimationbased adaptive observation model for aerial visual tracking applications[J]. International Journal of Computational Vision and Robotics,2014,4(12):134144.
[3]CAO X, GAO C, LAN J. Ego motion guided particle filter for vehicle tracking in airborne videos[J]. Neurocomputing,2014(124):168177.
[4]HU Y, RAJAN D, CHIA L. Attentionfrommotion: a factorization approach for detecting attention objects in motion[J]. Computer Vision and Image Understanding,2009(113):319331.
[5]KIM S W, YUN K, YI K M, et al. Detection of moving objects with a moving camera using nonpanoramic background model[J]. Machine vision and applications,2013,24(5):10151028.
[6]WALHA A, WALI A, ALIMI A M. Video stabilization with moving object detecting and tracking for aerial video surveillance[J]. Multimedia Tools and Applications,2015,74(17):67456767.
[7]ARNELL F, PETERSSON L. Fast object segmentation from a moving camera[C].Intelligent Vehicles Symposium, Proceedings IEEE,2005:136141.
[8]UGEAU A, PEREZ P. Detection and segmentation of moving objects in highly dynamic scenes[C]. IEEE Conference on Computer Vision and Pattern Recognition, New York: IEEE,2007:18.
[9]BAY H, TUYTELAARS T, GOOL L V. SURF: speeded up robust features[J]. Computer Vision & Image Understanding,2006,110(3):404417.
[10]WANG X, ZHANG Y, DONG H, et al. Algorithm research on threeframe difference for detection of moving target[J]. Journal of Shenyang Ligong University,2011,30(6):8285.
[11]LOWE D G. Distinctive image features from scaleinvariant keypoints[J]. International Journal of Computer Vision,2004,60(2):91110.
[12]OTSU N. A threshold selection method from graylevel histograms[J]. IEEE transactions on systems, man, and cybernetics,1979,9(1):6266.
[13]ALI S, SHAH M. COCOA: tracking in aerial imagery[J]. Proceedings of SPIE The International Society for Optical Engineering,2006,5(1):105114.
[14]SHEN H, LI S, ZHU C, et al. Moving object detection in aerial video based on spatiotemporal saliency[J]. Chinese Journal of Aeronautics,2013,26(5):12111217.
責(zé)任編輯(責(zé)任編輯:杜能鋼)endprint