極區飛行法向量慣性導航算法原理
2017-12-02 03:02:00張廣棟嚴恭敏楊洪濤
中國慣性技術學報 2017年5期
張廣棟,嚴恭敏,翁 浚,楊洪濤
(1.中國科學院 西安光學精密機械研究所,西安 710119;2.西北工業大學 自動化學院,西安 710129)
極區飛行法向量慣性導航算法原理
張廣棟1,嚴恭敏2,翁 浚2,楊洪濤1
(1.中國科學院 西安光學精密機械研究所,西安 710119;2.西北工業大學 自動化學院,西安 710129)
為克服經典力學編排方案在高緯度地區無法定位定向的問題,提出了以地球坐標系為導航坐標系的法向量慣性導航力學編排方案。該方案采用法向量代替傳統的經緯度坐標表示水平位置,適合于全球范圍內進行導航。推導了法向量導航誤差方程,可用于組合導航算法設計,從而對慣導誤差進行校正,滿足全天候長航時的導航要求。通過仿真驗證了法向量導航算法誤差特性,證明了該方案可以滿足飛機在極區飛行時的需要,解釋了飛躍極點時導航定位誤差跳變的原因。
極區導航;極區飛行;法向量導航;誤差方程
隨著全球氣候逐漸變暖,北極冰蓋也逐年消減,夏季冰面以相當快的速度消融,極區的資源價值、航運等問題也日益突出。另一方面,除了經濟利益之外,當今科學技術發展瞬息萬變,國際政治經濟軍事形勢錯綜復雜,各大國在極區的利益形勢暗流涌動,我國只有具備在極區的飛行能力才有發言權。對于現代化的飛機,必須擁有全球飛行的能力及迅速反應的能力,這要求飛機的準備時間要短,速度要快,還要求航線距離要盡可能短[1]。地球上任意兩點之間最短的是大圓航線,而長距離大圓飛行時往往要穿越極區,例如從東半球某地飛往西半球某地。對民航客機而言,例如中國飛往美國,如果采用極區航線,就可以不用橫跨太平洋,這樣不僅縮短了航程,還減少乘客長途飛行的疲倦感,并且節省燃油,從而通過增加載客量而使成本降低。
國外對極區導航的研究起步很早,1914年8月21日俄國皇家海軍上尉 Y.I.Nagurskiy 第一次駕駛飛機飛抵高緯度地區后標志著極地探險開啟了新篇章。1941年K.C.Maclure在其論文“Polar Navigation”中提出了格網導航的概念并建議用陀螺作為方位跟蹤的設備,1945年用該方法完成了白羊座I號飛向北極點的導航任務。由于所處的地理位置等因素,在極區導航的研究方面俄國的發展遙遙領先于北美和歐洲國家。技術保護的限制使得俄國早期關于極區導航方面的研究情況不得而知。后來由于戰時原因以及加拿大主權等問題需要飛機擁有極區飛行的能力,北美在極區導航問題上的投入逐漸增多。盡管如此,美國和加拿大在極區的科研活動直到1958年才達到俄國1943年的水平。波音公司于2001年正式開通了鏈接北美與亞洲的極區商業航線,這一舉動說明了歐美西方國家在極區導航領域已經有了相當成熟的方案。目前隨著大飛機項目的發展及軍機項目的需求,國內對極區導航領域的研究也漸漸引起了大家的關注。但由于地理位置的限制以及歷史上對極區探索的不足,國內對極區的研究相對滯后,研發的航空慣導系統也不具備極區飛行的能力[2-4]。
目前常見的極區慣性導航方法有三種:極區平面導航、橫向經緯度導航、格網導航。其中極區平面導航忽略了地球的球面特性,將慣性導航簡化為二維平面導航,存在著原理性誤差;橫向經緯度導航通過坐標變換將極點轉換到赤道上,雖解決了高緯度地區的導航問題,但是在赤道附近又無法完成定位定向,而且將地球模型當作圓球模型,也存在著原理性誤差;格網導航是目前比較成熟的一種極區導航方案,但是其計算量大,且在赤道附近不可用。上述方案均需要在高緯度地區與低緯度地區采用兩種不同的導航方式,無法在全球范圍內實施導航解算,使得導航系統變的更加復雜[5-8]。
本文在過去極區導航發展的基礎上,提出一種新的方法——法向量法,并且根據這種方法推導出一套適用于全球范圍導航的力學編排,進行仿真驗證。
1 法向量基本原理與相關計算
2010年挪威學者Kenneth Gade在The Journal of Navigation雜志上發表了“A Non-singular Horizontal Position Representation”一文,提出了一種無奇異的水平位置表示方法,并根據其原理將其命名為法向量法[9]。
曲面的各點的法向量可以用來表示該點的水平位置。法向量的定義如下:坐標系A下有一嚴格凸且可微的面,坐標系B是這個面上的坐標系。用B系原點指向面外側的單位長度法向量來表示B系相對于A系的位置。將這個法向量記作nAB。由于地球表面本身就是一個嚴格凸且可微的參考橢球面,依照上述定義,將地球坐標系e系當作A系,機體坐標系b系當中定義中B系,則可以用B點法向量表示載體相對于地球的位置。用來表示位置的向量記作neb,如圖1所示。
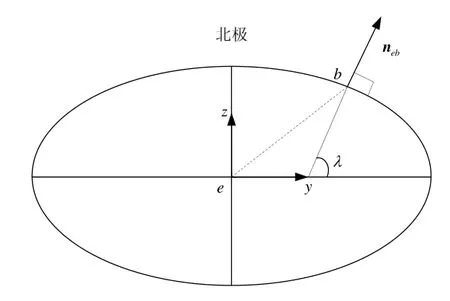
圖1 法向量與地球的關系Fig.1 Relationship between the normal vector and the Earth
法向量用來表示水平位置是無奇異的,因為它具有“一對一”的性質,即每個單位長度法向量只能對應一個水平位置,反之,每個水平位置也只能對應一個的單位長度法向量。而要達到這個要求,則法向量所在平面必須是一個閉合平面,且同時滿足嚴格凸與可微兩個條件。因為如果一個平面不是閉合的,則在其端點處可以有多個法向量對應這一點;如果平面非嚴格凸,則一個向量會與多點相對應,如圖 2(a)所示;如果平面不可微,則多個法向量可對應這個不可微分的點,如圖2(b)所示。
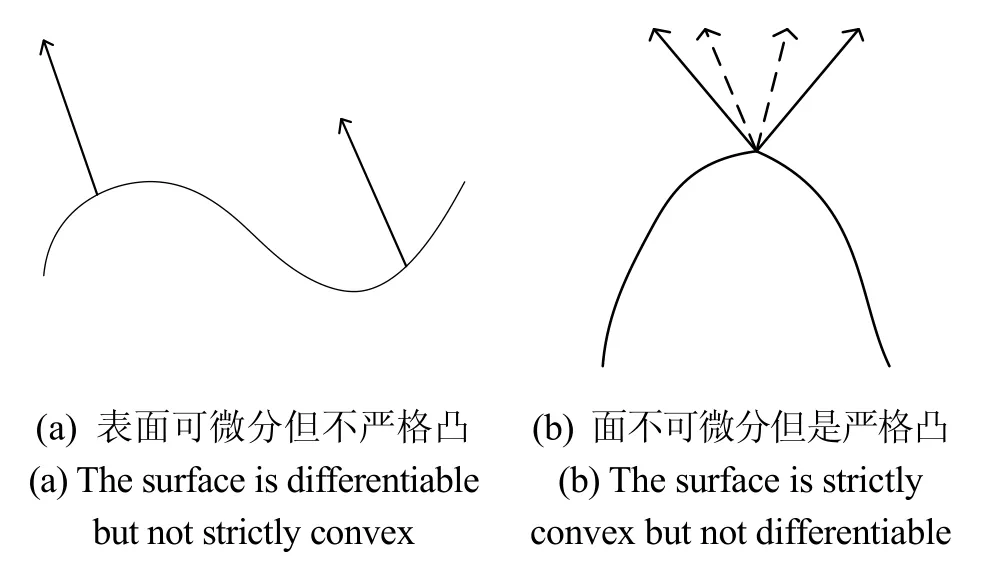
圖2 法向量與不同平面的關系Fig.2 Relationship between normal vectors and different planes
大地水準面本身就是一個嚴格凸且可微分的閉合橢球面,因此用法向量表示水平位置滿足“一對一”的性質,是無奇異的。
前面從幾何的角度分析了法向量是如何表示水平位置且無奇異的。下面將介紹一些在實際應用中十分有用的法向量基本運算。需要說明的是,如無特殊說明,本文中所涉及的法向量均是地球坐標系下向量。舉例說明,用法向量來表示北極點,可記作
1)經緯度轉換為法向量
經度λ和緯度L的取值范圍如下:

由幾何關系可得:

2)由法向量轉化為經緯度
由幾何關系可得:

在數值計算中,當緯度接近±π/2時,arcsin( )的計算精度降低,因此采用arctan2( )來計算緯度。從數學上講,對于任意角而言,arctan2( )的計算值都是準確的(0/0除外)。根據三角函數的關系,將緯度的計算公式重新定義如下:

式(4)(5)中atctan2(b,a)是arctan(b/a)的四象限版本,用四象限反正切表示可以避免載體在極點時法向量的x分量被零除。此外,由于三角函數在定義域內不具備一一對應的關系,因此反正切函數必須保證計算值在規定的值域范圍之內,式(5)中第二個參數非負,因此在計算緯度時可以確保計算值的正確性。
3)東向與北向
在極點以外的區域通常使用東/北向的定義來確定載體的航向,將垂直于子午面的方向定義為東向,用法向量表示如下:

同理,北向向量計算公式如下:

通過式(6)(7)可以得到地球系到地理系的旋轉矩陣:
式中的三個列向量分別表示東向、北向和天向的單位向量。
4)法向量的更新
根據哥式定理,可求得法向量變化率如下:


5)高度更新
高度變化率為地球系下速度在天向上的投影:

2 法向量慣性導航力學編排
法向量導航力學編排方案選取地球坐標系為導航坐標系,用法向量代替經緯度來進行位置更新,最后再根據需要將輸出的法向量轉化為經緯度或者直角坐標。其力學編排方案如下:
1)姿態微分方程:

式(12)的機上執行算法采用四元數法和旋轉矢量算法,具體可參考文獻[7]。
2)速度微分方程
根據文獻[7]中的比力方程可以寫出地球坐標系下的速度微分方程,如下:

3)位置微分方程
法向量導航采用法向量來求取當前經緯度,進而求取直角坐標。位置微分方程由水平位置微分方程與高度微分方程組成,其中水平位置由法向量表示:
此外,純慣導高度通道是發散的,因此必須使慣性高速通道具有阻尼,比如采用氣壓計和三階阻尼回路給慣導高速通道增加阻尼。
顯而易見,法向量導航力學編排方案直觀簡潔,計算量小,并且適用于全球范圍導航。后面會對此結論進行仿真驗證。
3 法向量導航誤差方程
為分析法向量導航的性能,同時也為了便于將法向量導航與其他導航系統進行組合導航,推導法向量誤差方程是十分必要的。
[10]中給出捷聯慣導系統的姿態誤差,當取地球坐標系為導航坐標系時:式(18)為姿態誤差方程,其中δKG、δG分別為陀螺的刻度系數誤差和安裝誤差角,ε為陀螺漂移;式(20)為速度誤差方程,其中,φ為姿態誤差角,δKA、δA分別為加速度計的刻度誤差系數和安裝誤差角;式(21)(22)為位置誤差方程。



4 仿真分析
為驗證極區法向量慣性導航的合理性,生成一條沿某固定經線飛躍極點然后飛出極區的軌跡。采用數值解法給出陀螺和加速度計信息。根據極區導航的需要,將軌跡起始點設置為(83°N, 108°E, 5000 m),載體沿108°E經線以250 m/s的速度向極點飛行,越過極點后沿 72°W 飛離極點,共飛行 7200 s,飛行距離 966 n mile。整個飛行過程無航向無機動,飛機保持平飛。
對仿真數據采用設計的法向量導航編排方案在不加器件誤差條件下進行仿真,算法誤差如圖3~6所示。
由結果圖可以看出,法向量導航在極區的算法誤差很小,可以滿足極區導航的需要。從圖5和圖6可以看出,經緯度表示下的位置誤差在極點附近有明顯變化,而直角坐標系下的位置誤差則更加平滑,所以在高緯度地區采用直角坐標表示位置時精度更高。
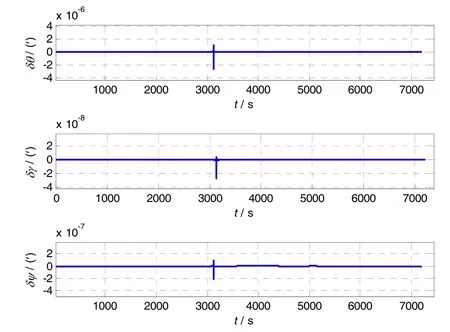
圖3 地球坐標系下姿態誤差角(無器件誤差)Fig.3 Attitude errors in earth frame (without apparatus error)
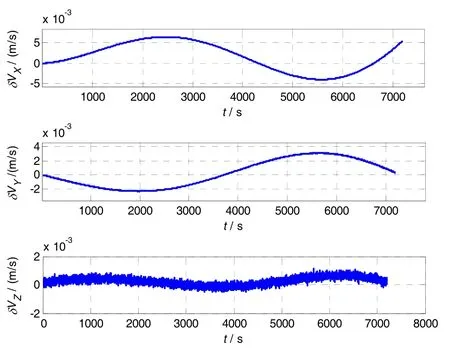
圖4 地球坐標系下速度誤差(無器件誤差)Fig.4 Velocity error in earth frame (without apparatus error)
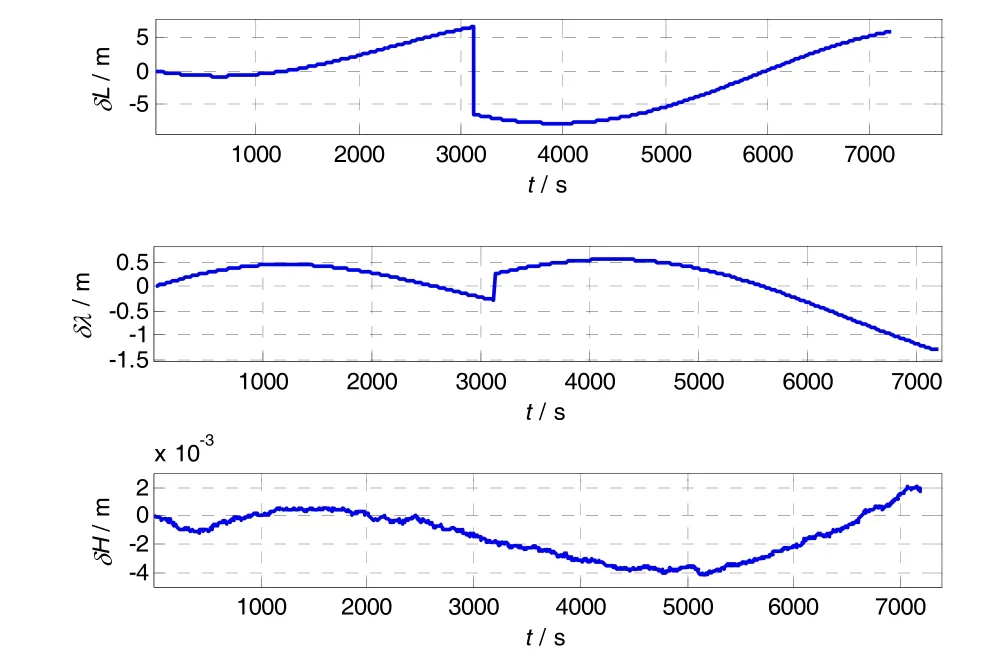
圖5 東北高位置誤差(無器件誤差)Fig.5 Latitude, longitude and height errors(without apparatus error)
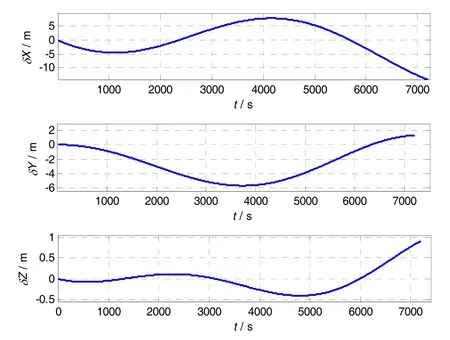
圖6 直角坐標系下位置誤差(無器件誤差)Fig.6 Position errors in ECEF frame (without apparatus error)
下面對圖5中導航定位誤差在極點附近跳變原因進行分析。如圖7所示,真實航路為a-b-c,而導航計算航路為A-B-C,兩者幾乎平行且靠得很近,定位誤差定義為計算值減去真實值。
在A點時,計算緯度大于真實緯度,因而緯度誤差為正;在B點二者恰好相等,誤差為零;過B點后,計算緯度小于真實緯度,誤差轉負。與緯度誤差分析類似,A點時,經度誤差為負,B點經度誤差絕對值最大,為180°,C點經度誤差轉為正。
實際上計算位置與真實位置的幾何距離變化不大,只不過由于經緯度定義的特殊性,在飛躍極點時,定位誤差方向會產生改變。

圖7 真實軌跡與計算軌跡之間關系Fig.7 Relationship between real trajectory and calculated trajectory
為進一步驗證慣性器件誤差對法向量導航算法的影響以及法向量導航算法對誤差的適應性,增加器件誤差并仿真。陀螺誤差參數設置如下:隨機常值漂移0.01 (°)/h,隨機游走系數加速度計誤差參數設置如下:隨機常值偏置40 μg,隨機游走系數高度通道通過氣壓高度計與慣導高度通道融合得到天向通道速度和高度。模擬氣壓高度計的隨機噪聲為10 m。仿真過程中的誤差如圖8~11所示。
由圖8可以看出,地球坐標系下的平臺失準角在2 h內引起的誤差小于2′。由圖9可以得出速度誤差小于0.8 m/s。圖10所示經度誤差小于200 m,緯度誤差小于3000 m,但是在極點附近有跳變。圖11所示直角坐標系內誤差全程小于2 km,且平滑無跳變。
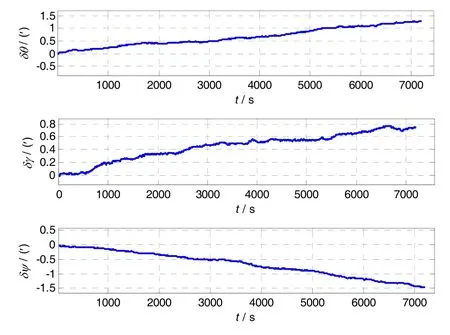
圖8 地球坐標系下姿態誤差角(有器件誤差)Fig.8 Attitude error in earth frame (with apparatus error)
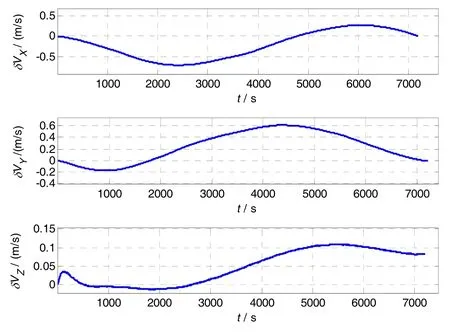
圖9 地球坐標系下速度誤差(有器件誤差)Fig.9 Velocity error in earth frame (with apparatus error)

圖10 東北高位置誤差(有器件誤差)Fig.10 Latitude, longitude and height errors(with apparatus error)

圖11 直角坐標系下位置誤差(有器件誤差)Fig.11 Position errors in ECEF frame (with apparatus error)
5 結 論
法向量的實質就是將游移方位力學編排位置方向余弦矩陣的最后一行包含水平位置信息的元素提取出來,拋棄游移力學編排中沒用的信息(游移方位角),并且用一個三維的向量去表示一個二維的水平位置,這樣做的目的是為了避免奇異。選取地球坐標系作為導航坐標系,其力學編排簡潔直觀,具有更好的應用價值。此外,與格網導航相比,法向量導航適用于全球范圍,不需要完成中低緯度與高緯度變化時導航模式之間的切換[9]。為滿足全天候長航時的導航要求,還需要同衛星導航、天文導航等進行組合導航,對慣導誤差進行校正,這方面可以利用文中所推導的誤差方程進行分析。
參考文獻(References):
[1]吳楓, 秦永元, 周琪.機載武器極區傳遞對準算法[J].中國慣性技術學報, 2013, 21(2): 141-146.Wu F, Qin Y Y, Zhou Q.Airborne weapon-transfer alignment algorithm in polar regions[J].Journal of Chinese Inertial Technology, 2013, 21(2): 141-146.
[2]Davydenko L.Arctic navigation[J].Polar Navigation, 2015,2(1): 173-181.
[3]Li Q, Ben Y Y, Yu F, et al.Transversal strapdown INS based on reference ellipsoid for vehicle in the polar region[J].IEEE Transactions on Vehicular Technology,2016, 65(9): 7791-7795.
[4]Kendall E C.Gyro/Grid navigation[J].Journal of Navigation, 1956, 9(4): 429-435.
[5]Andriani S, Lysandros T.Choosing a suitable projection for navigation in the arctic[J].Marine Geodesy, 2013,36(2): 234-259.
[6]Wang X W, Cheng X, Hui F M, et al.Navigation in fast ice near the Zhongshan Station, Antarctica[J].Marine Technology Society Journal, 2013, 48(1): 84-91.
[7]李倩, 孫楓, 奔粵陽, 等.基于橫坐標系的捷聯慣導系統極區導航方法[J].中國慣性技術學報, 2014, 22(3):288-295.Li Q, Sun F, Ben Y Y, et al.Polar navigation of strapdown inertial navigation system based on transversal frame in polar region[J].Journal of Chinese Inertial Technology,2014, 22(3): 288-295.
[8]周琪, 秦永元, 付強文, 等.極區飛行格網慣性導航算法原理[J].西北工業大學學報, 2013, 31(2): 210-217.Zhou Q, Qin Y Y, Fu Q W, et al.Grid mechanization in inertial navigation systems for transpolar aircraft[J].Journal of Northwestern Polytechnical University, 2013,31(2): 210-217.
[9]Gade K.A non-singular horizontal position representation[J].The Journal of Navigation, 2010, 63: 395-417.
[10]周琪.大飛機全球慣性導航算法研究[D].西安: 西北工業大學, 2013.Zhou Q.All-earth inertial navigation algorithm for large aircraft[D].Xi’an: Northwestern Polytechnical University,2013.
[11]王海波, 張漢武, 張萍萍, 等.基于橫向地球坐標的慣性導航方法[J].中國慣性技術學報, 2016, 24(6): 716-722.Wang H B, Zhang H W, Zhang P P, et al.Inertial navigation algorithm for polar region based on transverse terrestrial coordinate[J].Journal of Chinese Inertial Technology, 2016, 24(6): 716-722.
N-vector inertial navigation mechanization algorithm for transpolar aircraft
ZHANG Guang-dong1, YAN Gong-min2, WENG Jun2, YANG Hong-tao1
(1.Xi’an Institute of Optics And Precision Mechanics Chinese Academy of Sciences, Xi’an 710119, China;2.School of Automation, Northwestern Polytechnical University, Xi’an 710129, China)
The classical mechanization working could not confirm its position and heading in the circumpolar latitude area.For overcoming this problem, the normal vector inertial navigation basing on earth-fixed frame is presented.This approach uses a normal vector instead of latitude/longitude to finish updating of position.It could achieve navigation requirement world-wide.The n-vector mechanization error equations are derived,which can be used in the design of integrated navigation systems.The simulation could test and verify the error characteristics of n-vector mechanization.The n-vector mechanization offers the solution to transpolar aircraft.The reason of the navigation error saltation near the pole area is explained.
polar navigation; transpolar aircraft; normal-vector navigation; error equation
V249.3
A
1005-6734(2017)05-0606-05
10.13695/j.cnki.12-1222/o3.2017.05.009
2017-06-24;
2017-09-16
中科院西部之光基金(Y529571233)k
張廣棟(1990—),男,研究實習員,主要研究方向為慣性導航、目標定位。E-mail: 275916759@qq.com