電動汽車動態工況的EMI測試技術需求與方案設計
2017-11-29 13:31:11鄧俊泳林道祺劉國榮
中國測試 2017年11期
關鍵詞:測量
曾 博,鄧俊泳,林道祺,林 青,劉國榮
(中國電器科學研究院有限公司,廣東 廣州 510275)
電動汽車動態工況的EMI測試技術需求與方案設計
曾 博,鄧俊泳,林道祺,林 青,劉國榮
(中國電器科學研究院有限公司,廣東 廣州 510275)
針對電動汽車高度集成的電力驅動系統可能帶來電磁兼容性問題,討論國際上現行電動汽車電磁干擾(electromagnetic interference,EMI)測試標準中汽車工作狀況設置,指出動態車輛工況設置及測試方法研究的必要性。并設計動態車輛工況信息直接、間接測量方案,實時獲取車速νV、負載扭矩TV、制動力FS參數信息;其次,提出在動態車輛工況下特征頻率提取采用實時頻譜分析儀,最大發射值測量采用接收機的EMI測試方法;最后,提出讀寫時間戳法,實現動態車輛工況信息、EMI測試數據匹配。該集成方案可實現電動汽車動態工況下的EMI測試,且測試數據時間戳無累計誤差。
電動汽車;動態工況;特征頻率提取;發射值測量
0 引 言
電動汽車高度集成的電力驅動系統為電磁兼容(electromagnetic compatibility,EMC)測試帶來巨大挑戰。Guttowski S等[1]按照傳統汽車EMC測試方法測試電動汽車,由于高壓電力驅動系統,將導致測試結果一致性差;余紹峰等[2]發現驅動系統在不同功率下,電磁騷擾的絕對值及其對時間的變化率存在差別,在電磁兼容研究中應該引起重視;Ruddle A R等[3]討論當前汽車電磁兼容標準,認為目前測試規范、方法對電動汽車動力系統考慮不充分,需要進一步發展;Iglesias M等[4]發現四輪驅動電動汽車EMC特性會影響其中控系統可靠性;文獻[5]基于低于30MHz頻段的電動汽車EMI測試標準分析,指出國際上EMI測量手段一致,測量對象、評價指標各有區別,SAE J551-5——2012還規定應測量電動汽車多種運行狀況的電磁場要求[1]。本文將討論國際上現行電動汽車EMI測試標準中汽車工作狀況設置,進一步指出電動汽車EMI測試儀器的一些研究方向與熱點。
1 電動汽車EMI測試工作狀況與流程
當前,國際汽車整車EMI測試標準化組織包括國際無線電干擾特別委員會(international special committee on radio interference,CISPR)、 聯合國歐洲經濟委員會(economic commission of Europe,ECE)、美國機動車工程師學會(society of automotive engineers,SAE)、中國國家標準化管理委員會(standardization administration of China,SAC)等,其中 CISPR、ECE將電動汽車作為傳統內燃機車輛的一類,以發動機轉速描述車輛工作狀況,規定了發動機恒速運轉(巡航)、通電但不運轉(N擋)2種工況,如ECE R10-04、CISPR 12——2009(GB/T 14023——2011)、CISPR 25——2008(GB/T 18655——2010)、CISPR 36(制定中);SAE體系早期標準SAE J551-5——2004、GB/T 18387——2008以車輛速度描述其工作狀況,設定勻速巡航1種工況,在最新標準SAE J551-5——2012中,除巡航工況之外,又設置制動(制動壓力)、怠速(負載扭矩)2種工況。表1~表3分別為各標準、CISPR與ECE體系標準、SAE體系標準規定的車輛工作狀況。
SAE J551-5——2012中規定的測試流程為[6]:
1)按照表中特征頻率提取的取值,設置車輛工作狀況,測試各頻率下的發射值。
2)根據第1)步掃描結果,計算發射場強度減去限值后的最大值(離限值線最近)所在頻率。

表1 各標準規定的車輛工作狀況

表2 歐洲體系標準規定的車輛工作狀況
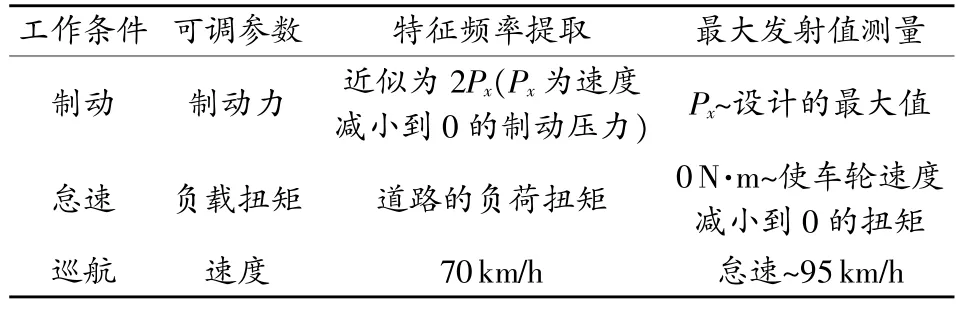
表3 SAE體系規定的車輛工作狀況
3)依據第2)步所得的頻率,在最大發射值測量規定范圍內選擇工況參數,測量最大射值。
4)重復步驟1)~3)進行另外3個側面與其他場的測量。
可以看出,SAE J551-5——2012設置車輛制動、怠速、巡航3種工況,采用控制變量的方式,較好地模擬常規駕駛時的各種情況,一定程度上保證電動汽車在各種使用狀態下均不會出現輻射超標現象。SAE J551-5——2012將“變化車輛工況”列為第5.4.4款,指出動態車輛狀況的測試方法還在研究中。
2 電動汽車動態工況EMI測試技術需求分析與設計
為實現電動汽車動態工況EMI測試,需分步實現動態工況下的特征頻率提取、最大發射值測量,這將會對底盤測功機、頻譜分析儀、掃描接收機等儀器設備的信息化程度提出更高的要求。
2.1 動態工況下車輛信息獲取
為了實現動態工況的EMI測量,應采集用以描述車輛工作狀況的參數[7-8],如車速νV、負載扭矩TV、制動力FS。需從車輛或底盤測功機,采用直接測量與間接測量的方法得到各種參數。
通過直接測量可在車輛對應位置獲得車速νV、負載扭矩TV、制動力FS。車速νV可以由車載診斷系統(the second on-board diagnostics,OBD II)中獲取,由OBD II系統提供的數據更新率約為10Hz。車輛負載扭矩TV可采用局部應力應變測量、車輛外部載荷測量兩種方案;局部應力應變測量方案直接在零部件的高應力應變點布置應變片,測量準確度高,但應變片粘貼位置受車輛型號影響[9];車輛外部載荷測量方案,一般采用車輪力傳感器測量作用于車輪軸頭的6個分力,經合成得到車輛外部載荷[10]。制動壓力FS則是在垂直力為0 N時的特殊情況,其傳感物理量與車輛負載扭矩TV相同。
實時獲取多車輪多參數的運動狀態信息,集成運動狀態實時監測系統,即可實現不同行駛狀況下車輪運動狀態監測[11]。但直接測量方案需要針對車輛特性布置傳感器,在實際測試中的可行性較差。
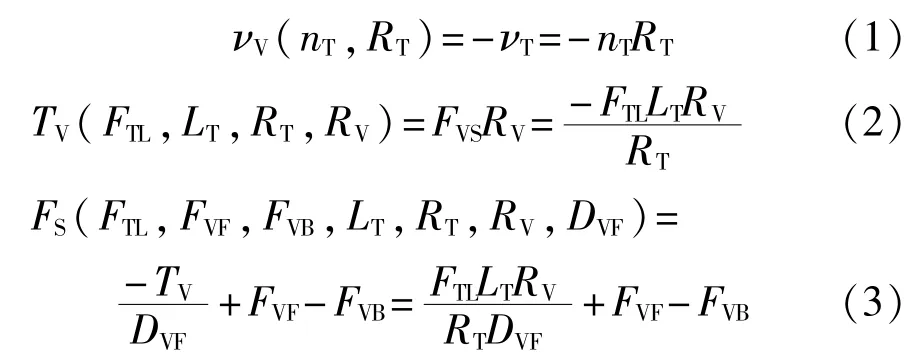
間接測量方案在底盤測功機可獲得的物理量基礎上[12],計算得車輛各參數。圖1為底盤測功機與車輛主動輪的受力分析圖。

圖1 底盤測功機與車輛主動輪受力分析圖
若車輪與轉鼓間無相對滑動,底盤測功機轉鼓轉速nT、半徑RT、固定位置拉力FTL、與車輪接觸面阻力FTS,前進、后退防護裝置拉力分別為FVF、FVB,車輛輪胎半徑RV、主動軸直徑DVF;車速νV、負載扭矩TV、制動力FS分別為
2.2 動態工況下特征頻率提取
在特征頻率提取階段,可以采用掃頻式頻譜分析儀、實時頻譜分析儀。
按標準CISPR 16-1-1——2010規定,采用準峰值檢波器測試頻段 B(150 kHz~30 MHz,RBW=9 kHz)[13],掃頻式頻譜分析儀至少需要耗時63.3s,而實時頻譜分析儀僅需1.0s。因此選用實時頻譜分析儀實現動態工況特征頻率提取。
實時頻譜分析儀利用有限長數據經離散傅里葉變換(discrete fourier transform,DFT),計算其頻域特性。設信號X(t)的無限長離散序列為X(∞)={x(n)}(n∈Z)、N點序列為X(N)={x(n)}(0≤n<N),則X(N)為

則其DFT[14]為

實際應用中若采用快速傅里葉變換(fast fourier transform,FFT)進行計算,由式(5)可知,變換兩端(時域和頻域上)的序列為有限長,信號截斷會產生能量泄漏。對有限長離散信號作DFT,會對其周期延拓變換,存在柵欄效應,可選擇合適的窗函數抑制。不同窗函數對信號頻譜影響不同,如矩形窗主瓣窄、旁瓣大,頻率識別準確度最高、幅值識別準確度最低;布萊克曼窗主瓣寬、旁瓣小,頻率識別準確度最低、幅值識別準確度最高。
在特征頻率提取階段,頻率與幅值識別準確度都會影響到特征頻率的提取,故需要針對電動車動態工況的信號設置窗函數,提高特征頻率提取準確度。
設實時頻譜分析儀的原理誤差為u1、頻率讀數不確定度為u2,則儀器的合成不確定度uc為

降低實時頻譜分析儀原理誤差u1與頻率讀數不確定度u2,即可降低合成不確定度uc。
設儀器游標頻率fc、頻率精準不確定度u2_1、掃描帶寬特性ascan、分析帶寬特性arbw、掃描帶寬fscan、分析帶寬frbw、掃描點數N,則頻率讀數不確定度u2為

其中,fc、u2_1、ascan、arbw、frbw由儀器特性決定, 對于同一臺儀器,其值不變;fscan由測試標準決定,對于同一項目測試,其值不變。因此,只能通過提高掃描點數N或設計最優的窗函數,才能降低儀器的合成不確定度uc,提高特征頻率提取準確度。
2.3 動態工況下發射值測量
發射值測量采用接收機的固定頻率模式,在提取到的特征頻率fCi(i=1,2,3,…)下,測量得電磁場發射值ECi隨掃查時間tR的變化關系,并與規定的限值比較得出結論。在動態工況下,汽車工況隨測試開始后的時間tT變化,應將tT與tR對應起來。時間對應可以采用協同作業或讀寫時間戳2種方案。

若底盤測功機、EMI測試接收機的延時特性分別為tTC、tRC,則對于相等的相對時間戳t(i)T、t(j)R,系統誤差ΔtC為

系統誤差ΔtC可以利用軟件控制儀器多次測得平均值進行補償。此外,采用采樣頻率與數據點數計算相對時間的方法,存在累積誤差。
2)讀寫時間戳法在上位機獲取發出開始指令、收到數據的時間,則對于數據中各個采樣點的時間,可以采用插值方法(如牛頓-萊布尼茨插值等)計算。圖2為基于讀寫時間戳的同步方案機理圖。

圖2 基于讀寫時間戳的同步方案
設上位機發出開始指令的時間Ts、儀器開始采集數據的時間TAs、儀器結束采集數據的時間TAe、上位機接收到數據的時間Te,則數據時間戳的原理誤差uT為

可見,該方案沒有累積誤差;若儀器為頻譜分析儀,其檢波時間TD=TAe-TAs,則可計算得uT,再對插值方法進行補償,即可抑制原理誤差。
另外,若能測得上位機與儀器的通信延遲、儀器與上位機的數據傳輸時間,再對插值方法進行補償,可更加有效地抑制原理誤差。
3 結束語
1)分析當前國際汽車整車EMI測試標準化工作,指出研究動態車輛狀況的EMI測試方法是未來趨勢且具有一定意義,并分析其對車輛信息獲取、電磁干擾值測試的技術需求。
2)明確動態工況應獲取的車輛信息為車速νV、負載扭矩TV、制動力FS,設計通過實時獲取多參數運動狀態信息的直接測量方案與根據底盤測功機獲得物理量計算車輛各參數的間接測量方案。
3)動態工況下電磁干擾值測試,選用實時頻譜分析儀實現特征頻率提取,需研究專用窗函數,提高特征頻率提取準確度;最大發射值測量可采用接收機的固定頻率模式。針對協同作業法對應EMI測量值與車輛工況數據存在累積誤差的問題,提出無累積誤差的讀寫時間戳法。
[1]GUTTOWSKI S, WEBER S, HOENE E, et al.EMC issues in cars with electric drives[C]∥2003 IEEE Symposium on Electromagnetic Compatibility,2003.
[2]余紹峰,何金良,張波,等.燃料電池客車驅動系統傳導騷擾源的統計分析[J].高電壓技術,2007,33(10):45-48.
[3]RUDDLE A R,ARMSTRONG R.Review of current EMC standards in relation to vehicles with electric powertrains[C]∥2013 International Symposium on Electromagnetic Compatibility,2013.
[4]IGLESIAS M, ECHEVERRIA I, ARTECHE F, et al.EMC mapping of a power train for fully electric 4-wheel drive vehicle[C]∥2014 International Symposium on Electromagnetic Compatibility,2014.
[5]曾博,鄧俊泳,林道祺,等.電動汽車低于30 MHz頻段EMI測試標準分析[J].中國測試,2016,42(9):11-14.
[6]Performance levels and methods of measurement of magnetic and electric field strength from electric vehicles,150 kHz to 30MHz:SAE J551-5-2012[S].2012.
[7]汪玲燕,程耕國,鮑考明,等.OBD物聯網控制系統的研究與開發[J].自動化儀表,2015,36(5):52-56.
[8]黃瑞龍,劉桂雄,黃堅,等.基于掃頻調諧預掃描的快速EMI測試關鍵技術研究[J].電子測量與儀器學報,2016,30(8):1269-1274.
[9]王霄鋒,徐文,黃元毅,等.車輛道路行駛載荷測量方法研究[J].機械強度,2012(5):666-671.
[10]李世武,姚雪萍,孫文財,等.體現懸架特性的車輛載荷狀態監測技術[J].吉林大學學報(工學版),2014,44(2):335-342.
[11]張健偉,劉桂雄,潘夢鷂.基于智能傳感的車輪運動狀態監測系統設計[J].科學技術與工程,2011(18):4268-4272.
[12]溫溢,田野,王建海,等.耐久底盤測功機隨使用時間的內阻特性研究[J].中國測試,2013,39(4):121-124.
[13]Specification for radio disturbance and immunity measuring apparatus and methods——Part 1-1:Radio disturbance and immunity measuring apparatus——Measuring apparatus:CISPR 16-1-1:2010[S].2010.
[14]ARIF M.A novel approach for DFT computation[C]∥2015 International Conference on Circuits,Power and Computing Technologies(ICCPCT),2015.
(編輯:商丹丹)
Technology requirement and scheme design for electric vehicle EMI measurements in transient condition
ZENG Bo, DENG Junyong, LIN Daoqi, LIN Qing, LIU Guorong
(China National Electric Apparatus Research Institute Co.,Ltd.,Guangzhou 510275,China)
Forhighly integrated electric drive system of electric vehicle could lead to the electromagnetic compatibility problem, the vehicle conditionspreceptsof currentinternational electric vehicle electromagnetic interference (EMI) measurements standard were discussed.It was necessary to study the transient condition of the vehicle design and test method.On this purpose,direct and indirect real-time measurement methods for transient vehicle conditions information were put forward, and the vehicle speed, load torque and braking force were acquired in real time.EMI measurements method for transient vehicle conditions was also proposed,which characteristic frequency was test by real-time spectrum analyzer and emission was measured by receiver.In order to matching transient vehicle conditions information and EMI measurement data,a read/write timestamp method was present.The discussion shows that integration scheme can realize electric vehicle EMI measurements in transient condition.There is no accumulated error from the read/write timestamp matching method.
electric vehicle; transientcondition; characteristic frequency extraction; emission measurement
A
1674-5124(2017)11-0008-04
10.11857/j.issn.1674-5124.2017.11.002
2017-02-11;
2017-03-24
廣州市科技計劃項目(201504010037)
曾 博(1981-),男,湖北公安縣人,工程師,碩士,主要從事電磁兼容檢測技術研究。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
