首升力體、首鰭/尾板與船體水動力相互干擾與匹配研究
2017-11-28 07:00:02王習(xí)建吳寶山周德才邱耿耀
船舶力學(xué) 2017年11期
關(guān)鍵詞:船舶
王習(xí)建,吳寶山,周德才,邱耿耀,高 雷,蘭 波
(中國船舶科學(xué)研究中心,江蘇 無錫 214082)
首升力體、首鰭/尾板與船體水動力相互干擾與匹配研究
王習(xí)建,吳寶山,周德才,邱耿耀,高 雷,蘭 波
(中國船舶科學(xué)研究中心,江蘇 無錫 214082)
升力體技術(shù)已被CFD、縮比模型試驗和實船試驗證實,在零航速與有航速情況下均可減小船舶在波浪中的運動響應(yīng),提高船舶耐波性。該文以數(shù)值計算為主要技術(shù)手段,結(jié)合模型試驗驗證,開展了首升力體、首鰭/尾板與船體水動力相互干擾與匹配研究。首先,采用自由船模拖曳的數(shù)值模擬方法,開展了基于快速性的首升力體與船體位置匹配研究,獲得了首升力體在船體上的較佳位置;其次,對首升力體加裝首鰭,分析了首升力體、首鰭組合與船體水動力相互干擾,獲得了復(fù)合初步船型方案;再次,對復(fù)合初步船型方案加裝尾板,討論了首升力體、首鰭、尾板組合與船體水動力相互干擾,獲得了復(fù)合優(yōu)化船型方案;最后,對復(fù)合優(yōu)化船型方案在規(guī)則波中的運動響應(yīng)進行數(shù)值預(yù)報與對比分析,并預(yù)報不規(guī)則波中的減搖效果。文中的研究成果可為后續(xù)首升力體在單體船上的應(yīng)用提供技術(shù)支撐。
首升力體;水動力相互干擾;運動響應(yīng)
0 引 言
由于受到海風(fēng)、海浪及海流等因素的影響,船舶在航行中會產(chǎn)生各種搖蕩作用,劇烈的搖蕩對船舶的適航性、安全性以及設(shè)備、人員的正常工作都會產(chǎn)生顯著的影響。一直以來,人們都在尋求減小船舶搖蕩,提高船舶耐波性的方法,并研制出了一些有效的船舶減搖裝置[1]:舭龍骨、減搖鰭、減搖水艙、半潛首等。與此同時,在這過程中出現(xiàn)了許多優(yōu)良船型,如小水線面雙體船、半潛首船型、升力體船型等,這些船型都具有優(yōu)良的耐波性[2]。
事實上,升力體技術(shù)已被CFD、縮比模型試驗[3]和實船試驗證實,在零航速與有航速情況下均可降低船舶運動,提高船舶耐波性。升力體是具有弧形橫截面的水下結(jié)構(gòu)物[4],具有較大的體積,較大的平面面積,以及低升力系數(shù)[5]。根據(jù)升力體的自身特點和在船體上的安裝位置,可將升力體分為首升力體、中部升力體和尾升力體。如果將升力體與船的首部合理結(jié)合,不僅能減小船舶搖蕩,提高船舶耐波性能,還有可能獲得類似于球鼻首一樣的積極作用[6],降低船舶阻力。
升力體技術(shù)轉(zhuǎn)化為實船應(yīng)用的首例是美國海軍的“海飛”(Sea flyer)號艦艇[7](如圖1所示),美國海軍研究署和Navatek公司于2004年完成了“海飛”號艦艇的第一階段技術(shù)演示任務(wù)。“海飛”號是一艘獨特的升力體船,由于采用了升力體技術(shù),它可在高航速的情況下將船體幾乎完全抬出水面,并且仍具有較好的穩(wěn)定性[8]。2006年,為了滿足瀕海戰(zhàn)斗艦的使命要求,美國Navatek公司建造了BLB-70升力體技術(shù)示范艇(如圖1所示),試驗結(jié)果表明,與裸船體相比,BLB-70的升阻比提高了15%~30%,它不僅能降低船舶阻力,還能有效地減小船舶運動,這與CFD數(shù)值計算的結(jié)果十分吻合。但國內(nèi)對升力體技術(shù)的研究成果尚未見公開發(fā)表。

圖1 Sea flyer和BLB-70Fig.1 Sea flyer and BLB-70
目前,國外一些高性能船舶應(yīng)用了升力體技術(shù),主要利用升力體的抬升功能,將船體抬出水面,從而減小摩擦阻力,達到降低船舶總阻力目的。而作者主要利用首升力體與船體之間的有利波系干擾來減小船舶阻力,并提高船舶耐波性,而船體本身并不抬出水面。本文以CFD數(shù)值計算為主要技術(shù)手段,并結(jié)合水池模型試驗方法,開展了基于快速性的首升力體、首鰭/尾板與船體之間的水動力干擾與匹配研究,獲得了快速性和耐波性均優(yōu)良的復(fù)合優(yōu)化船型方案;最后,對復(fù)合優(yōu)化船型方案開展了耐波性數(shù)值預(yù)報和模型試驗,并評估其耐波性能。
1 數(shù)值計算方法
1.1 控制方程
不可壓縮流體的連續(xù)性方程與動量守恒方程為:

對于水面船自由面繞流這種兩相流問題,水與空氣的質(zhì)量都應(yīng)該是守恒的。由于流體的不可壓縮性,可以用體積分?jǐn)?shù)寫為:

計算區(qū)域內(nèi)的每個控制體積都由水或空氣充滿,它們的體積分?jǐn)?shù)之和應(yīng)為1,即:

式中:α表示體積分?jǐn)?shù),下標(biāo)a和w分別代表空氣和水。
1.2 湍流模型
本文所采用的湍流模型為RNG k-ε,此模型考慮了平均流動中的旋轉(zhuǎn)及旋流流動情況,修正了湍動粘度和ε方程,這就使得RNG k-ε模型可以更好地處理高應(yīng)變率及流線彎曲程度較大的流動。
湍流動能k的方程為:

湍流耗散率ε的方程為:

式中:C1ε=1.42,C2ε=1.68。
1.3 造波與消波
采用在入口邊界模擬柔性造波板運動的速度分布產(chǎn)生入射波。根據(jù)深水中的線性波浪理論,規(guī)則波的自由波面可以表達成[9]:

而規(guī)則波的速度場為:

式中:A是波幅,k為波數(shù),ω是波浪圓頻率;x軸為波浪傳播方向,z軸為波動方向。
數(shù)值消波采用網(wǎng)格技術(shù)結(jié)合人工阻尼的方法,消波區(qū)人工阻尼Dmp的表達式:

1.4 船體運動與流動的耦合
水面船模拖曳前進時,會對其周圍流場產(chǎn)生影響,使壓力場和剪應(yīng)力場發(fā)生變化,也就使船模所受的力和力矩發(fā)生變化:

2 首升力體與船體水動力相互干擾與匹配研究
2.1 光體及首升力體主尺度
眾所周知,深V船型自問世以來,就因為其在波浪中的良好性能而備受研究人員青睞。本文以千噸級深V船型作為研究對象,參考相關(guān)文獻[10],并對其型線進行了適當(dāng)改型。選取水線長L=4 m的模型作為計算對象,模型主尺度見表1,橫剖面型線見圖2。

表1 模型主尺度Tab.1 Main dimensions of scale model

圖2 橫剖面型線圖Fig.2 The body section of bare hull

圖3 首升力體三維效果圖Fig.3 Three-dimensional sketch of bow-lifting-body
通過對有自由液面情況下,不同長寬比、不同浸深和不同航速首升力體水動力特性的研究,綜合考慮首升力體的升阻比、自由面興波和結(jié)構(gòu)強度等因素,選取長寬比λ=2的首升力體為研究對象,三維效果圖見圖3,模型尺度見表2。

表2 首升力體模型尺度Tab.2 Model dimensions of the bow-lifting-body
2.2 首升力體縱向位置研究
針對選取的光體和首升力體,開展首升力體與船體位置匹配研究。首升力體在船體上的布置主要考慮縱向位置和垂向位置,首先對首升力體的縱向位置進行匹配研究。

圖4 首升力體縱向位置方案Fig.4 The longitudinal position scheme of bow-lifting-body
為了獲得首升力體相對于船體的最佳縱向位置,以水線和船體首柱的交點A作為起始位置,將首升力體分別后移0.5站,前移0.5站、1站、1.5站、2站,對6個不同首升力體縱向位置方案,見圖4,在航速V=2.025 m/s(Fr=0.32)和 V=3.372 m/s(Fr=0.54)下進行靜水自由模[11]CFD阻力數(shù)值計算,并與光體自由模CFD阻力數(shù)值計算結(jié)果進行比較分析,見圖5。
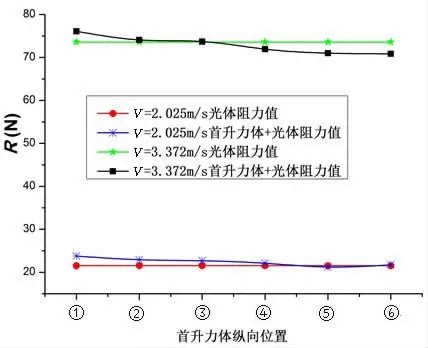
圖5 不同首升力體縱向位置阻力計算值Fig.5 Resistance calculation results of bow-lifting-body at different location
圖5給出了首升力體處于不同縱向位置的阻力計算結(jié)果,從圖中可以看出,當(dāng)航速為 2.025 m/s(Fr=0.32),首升力體處于①、②、③、④位置時,復(fù)合船型阻力均大于光體,而當(dāng)首升力體處于⑤、⑥位置時,復(fù)合船型阻力均小于光體,⑤位置時復(fù)合船型阻力最小,此時阻力較光體降低1.39%。當(dāng)航速為 3.372 m/s(Fr=0.54),首升力體處于①、②、③位置時,復(fù)合船型阻力均大于光體,隨著首升力體繼續(xù)前移,④位置時復(fù)合船型阻力開始小于光體,當(dāng)首升力體處于⑤位置時,復(fù)合船型阻力降低3.51%,而當(dāng)首升力體處于⑥位置時,復(fù)合船型阻力最小,較光體降低3.71%。基于以上分析,首升力體前移將會降低復(fù)合船型阻力,但是考慮到工程實際應(yīng)用,如果首升力體前移過多,將會導(dǎo)致全船長度增加,這會帶來一些其他的問題,比如船舶進塢、回轉(zhuǎn)等將受到較大的影響;同時,還會影響到首升力體與船體連接的結(jié)構(gòu)強度。綜合考慮這些因素,選取首升力體處于⑤位置,即首升力體前移1.5站時作為首升力體縱向位置最佳方案。
2.3 首升力體垂向位置研究
在縱向位置匹配方案的基礎(chǔ)上,對首升力體的垂向位置進行匹配研究,首先對首升力體在不同浸深時自由面興波的波形進行了數(shù)值計算。
圖6為不同浸深時首升力體自由面中心線處波高的比較(其中H為首升力體前緣點到水面的距離,L為首升力體的最大弦長),從圖中可以發(fā)現(xiàn),首升力體的浸深比越小,波幅越大,產(chǎn)生的興波越明顯,這將有助于利用首升力體產(chǎn)生的興波與船首產(chǎn)生的興波發(fā)生有利波系干擾,起到降低船舶阻力的作用,因而首升力體的垂向位置不應(yīng)太深;但若浸深太淺,首升力體會產(chǎn)生出水現(xiàn)象,對結(jié)構(gòu)強度造成損壞,為此垂向位置選取首升力體弦長位置與船體基線齊平,這與常規(guī)球鼻首在船體上的垂向位置布置相一致。同時考慮到首升力體與船體連接支柱形式的阻力和結(jié)構(gòu)強度等因素,首升力體與船體匹配位置,見圖7。
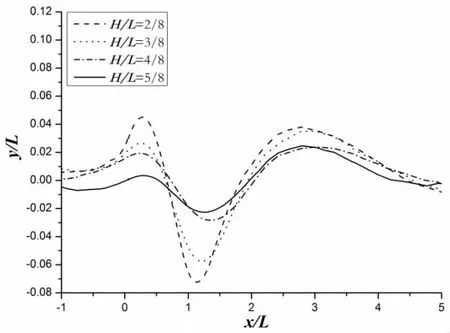
圖6 不同浸深時首升力體自由面處的波高Fig.6 Wave height of free surface under different depth

圖7 首升力體與船體匹配方案Fig.7 Matching scheme of bow-lifting-body and monohull
3 首升力體、首鰭/尾板組合與船體水動力相互干擾與匹配研究
通過對首升力體加裝首鰭,研究首升力體、首鰭組合與船體的水動力相互干擾,獲得了復(fù)合初步船型方案,然后在船體上加裝尾板,進行了船體航行姿態(tài)調(diào)整與優(yōu)化,研究首升力體、首鰭、尾板組合與船體的水動力相互干擾,探索首升力體的減阻效果,并獲得了復(fù)合優(yōu)化船型方案。
3.1 首升力體、首鰭組合與船體水動力干擾特性分析
(1)首鰭與首升力體幾何構(gòu)型
為了更好地改善船舶耐波性,在首升力體上加裝首鰭,這樣可以提高船體縱向運動性能。考慮到減縱向運動的效果,選取的首鰭尺寸不宜太小;但若首鰭的尺寸過大,將會引起首升力體阻力的大幅增加,還會增加首升力體寬度,導(dǎo)致船舶回轉(zhuǎn)、進港受限等,同時帶來結(jié)構(gòu)強度問題。基于這些因素的考慮,加裝首鰭后的首升力體,見圖8。
(2)復(fù)合初步船型方案快速性數(shù)值計算
對加裝首升力體、首鰭的復(fù)合初步船型方案V1,進行靜水中船體航行姿態(tài)和阻力計算,并與試驗值對比,驗證了數(shù)值計算方法,見圖10~12。其中V為對應(yīng)速度,Z為升沉值,θ為縱傾角(尾傾為正),R為阻力值。

圖8 加裝首鰭后的首升力體Fig.8 The bow-lifting-body with fin

圖9 加裝首升力體、首鰭的復(fù)合初步船型方案(V1船型)Fig.9 The preliminary scheme of hybrid monohull with bow-lifting-body and fin
圖10升沉曲線計算結(jié)果表明,光體、V1船型的升沉值隨航速增加先減小后增大,由于加裝了首升力體、首鰭,V1船型的升沉值大于光體。圖11縱傾曲線計算結(jié)果表明,光體、V1船型的縱傾值隨航速增加逐漸增大,當(dāng)航速為3.707 m/s(Fr=0.59)時,由于首升力體的升力作用,V1船型航行縱傾角達到1.8°,大于光體的縱傾角,航行姿態(tài)變差,導(dǎo)致V1船型的靜水阻力大于光體。由圖12靜水阻力數(shù)值計算結(jié)果可知,V1船型靜水阻力在低速時略大于光體,隨著航速的增加,逐漸與光體接近,當(dāng)航速大于2.025 m/s(Fr=0.32)時,小于光體阻力,此時首升力體、首鰭組合起到了減阻的作用,當(dāng)航速為3.037 m/s(Fr=0.48)時,V1船型減阻最大,約為 7%。

圖10 靜水中升沉曲線圖Fig.10 Sinkage in still water

圖11 靜水中縱傾曲線Fig.11 Trim in still water

圖12 阻力計算結(jié)果Fig.12 Calculation results of resistance

圖13 首升力體消波效果圖Fig.13 Wave cancellation sketch of bow-lifting-body
圖13為航速V=3.372 m/s(Fr=0.54)時,光體和V1船型的首部波形圖,從圖中可以看出,由于加裝了首升力體、首鰭,V1船型首部的興波被顯著地削弱了,首部興波得到明顯改善,從直觀上解釋了V1船型阻力減小的原因。
(3)復(fù)合初步船型方案阻力特性分析
通過對光體和V1船型阻力成份比較,進一步分析首升力體、首鰭組合減阻的原因。

表3 阻力成份分析Tab.3 Analysis of resistance component
對3個航速下光體、V1船型的阻力成份進行分析,從表3中可以看出,由于加裝了首升力體、首鰭,V1船型的摩擦阻力明顯大于光體;從壓阻力的減小可以看出,首升力體、首鰭組合與船體發(fā)生了有利波系干擾,起到了減小壓阻力的作用。對于總阻力而言,由于V1船型壓阻力的減小量大于摩擦阻力的增加量,首升力體、首鰭組合起到了減小船體總阻力的效果。
3.2 首升力體、首鰭、尾板組合與船體水動力干擾特性分析
根據(jù)上文的分析可知,當(dāng)V1船型航速為3.707m/s(Fr=0.59)時,其總阻力明顯大于光體,主要是因為此時首升力體、首鰭組合對V1船型首部抬升力過大,導(dǎo)致V1船型航行姿態(tài)變差。因而,需要對復(fù)合初步船型方案進一步優(yōu)化。

圖14 加裝首升力體、首鰭和尾板的復(fù)合優(yōu)化船型方案(V2船型)Fig.14 The optimization scheme of hybrid monohull with bow-lifting-body,fin and stern flap
通過安裝尾板來平衡由首升力體和首鰭產(chǎn)生的升力,調(diào)整船舶姿態(tài),降低其阻力。參考相關(guān)研究成果[12],選取尾板弦長為水線長的2%,展長與尾封板寬度相同,為達到較好的壓浪效果和避免使船體出現(xiàn)較大的埋首,優(yōu)化后選取尾板下反角α=5°,如圖14所示。
(1)復(fù)合優(yōu)化船型方案快速性數(shù)值計算
對加裝首升力體、首鰭和尾板的復(fù)合優(yōu)化船型方案V2,進行靜水中船體航行姿態(tài)和阻力計算,并與試驗值對比,驗證了數(shù)值計算方法,見圖15~17。

圖15 靜水中升沉曲線 Fig.15 Sinkage in still water
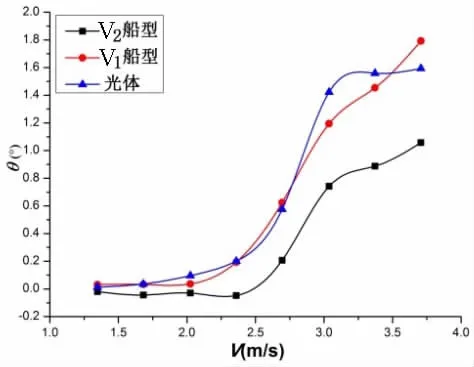
圖16 靜水中縱傾曲線Fig.16 Trim in still water

圖17 阻力計算結(jié)果Fig.17 Calculation results of resistance
圖15升沉曲線計算結(jié)果表明,首升力體、首鰭和尾板三者組合提供了升力,使得V2船型的升沉值最小。同時,圖16縱傾曲線計算結(jié)果表明,V2船型縱傾值明顯小于光體、V1船型,這表明尾板很好地平衡了首升力體的抬首力矩,調(diào)整了船舶航行姿態(tài),使船舶抬首顯著減小。由圖17靜水阻力數(shù)值計算結(jié)果可知,在低航速時,由于加裝了首升力體、首鰭和尾板,V2船型靜水阻力大于光體和V1船型。在中、高航速時,V2船型阻力最小,當(dāng)航速為3.037 m/s(Fr=0.48)時,與光體相比,V2船型減阻最大,約為14%;與V1船型相比,加裝尾板的V2船型在航速大于2.025 m/s(Fr=0.32)時,體現(xiàn)出了更好的靜水阻力性能,這表明首升力體、首鰭和尾板三者的匹配較為成功。
(2)復(fù)合優(yōu)化船型方案阻力特性分析
通過對V1船型和V2船型阻力成份比較,分析V2船型的阻力特性。
對3個航速下V1船型、V2船型阻力成份進行分析,從表4中可以發(fā)現(xiàn),加裝尾板后,盡管增加了V2船型的摩擦阻力,但尾板改善了船舶航行姿態(tài),使V2船型壓阻力進一步減小,由于壓阻力的減小量大于摩擦阻力的增加量,從而降低了總阻力。此外,由試驗現(xiàn)象和數(shù)值計算結(jié)果可知,尾板的安裝在一定程度上也減小了船舶阻力。

表4 阻力成份分析Tab.4 Analysis of resistance component
4 復(fù)合優(yōu)化船型方案耐波性預(yù)報
由前文CFD快速性數(shù)值計算結(jié)果可知,加裝首升力體、首鰭和尾板的復(fù)合優(yōu)化船型方案V2具有良好的靜水阻力性能,下面基于CFD數(shù)值波浪水池和耐波性模型試驗,對復(fù)合優(yōu)化船型方案在規(guī)則波中的運動響應(yīng)進行數(shù)值預(yù)報與對比分析,并預(yù)報不規(guī)則波中的減搖效果。
4.1 規(guī)則波中運動響應(yīng)數(shù)值計算預(yù)報與模型試驗
對光體、復(fù)合優(yōu)化船型方案V2在V=2.025 m/s(Fr=0.32)和V=2.694 m/s(Fr=0.43)兩個航速下進行頂浪規(guī)則波中運動響應(yīng)數(shù)值計算,預(yù)報了縱搖,垂蕩以及首部19站、重心、尾部1站處垂向加速度,并對V2船型開展耐波性模型試驗。圖18為規(guī)則波中運動響應(yīng)數(shù)值預(yù)報與模型試驗結(jié)果。其中,λ為波長,L為設(shè)計水線,Z為垂蕩值,ξ為波幅,θ為縱搖角,k為波數(shù),A1為首部加速度,A2為重心加速度,A3為尾部加速度,g為重力加速度。
從圖18中可以看出,兩個航速下縱搖運動響應(yīng)的CFD數(shù)值計算結(jié)果與試驗值吻合較好;垂蕩運動響應(yīng)、首部19站、重心和尾部1站處垂向加速度運動響應(yīng)的數(shù)值計算結(jié)果與試驗值也吻合較好,但總體上數(shù)值計算結(jié)果要略大于試驗值。


圖18 規(guī)則波中運動響應(yīng)數(shù)值預(yù)報與模型試驗結(jié)果Fig.18 Numerical prediction of motion response in regular wave and model test results
從圖18的運動響應(yīng)曲線可以看出,與光體相比,復(fù)合優(yōu)化船型方案的縱向運動響應(yīng)明顯減小,表明加裝首升力體、首鰭和尾板后,復(fù)合優(yōu)化船型方案產(chǎn)生了較大的縱向力矩,對船舶的縱向運動起到了很好的抑制作用。特別是,當(dāng)波長在0.75~1.5倍船長時,復(fù)合優(yōu)化船型方案的減搖效果最為明顯。
4.2 不規(guī)則波中運動有義值預(yù)報
根據(jù)規(guī)則波中的運動響應(yīng)傳遞函數(shù)和線性疊加原理,對光體和V2船型采用ITTC雙參數(shù)譜,預(yù)報了有義波高分別為2.5 m、4 m和6 m,在航速18 kns和24 kns下的運動響應(yīng)有義值,見表5,并分析了復(fù)合優(yōu)化船型方案V2與光體相比的縱向減搖效果,見表6。

表5 不規(guī)則波中運動響應(yīng)(單幅有義值)Tab.5 Motion response in irregular waves

表6 復(fù)合優(yōu)化船型方案減搖效果Tab.6 The stabilizing effect of optimization scheme
從表6可見,在不同有義波高下,復(fù)合優(yōu)化船型方案V2的運動響應(yīng)明顯小于光體;航速18kns時,縱搖運動平均減搖效果為27.3%,垂蕩運動平均減搖效果為5.6%,首部19站垂向加速度,重心垂向加速度,尾部1站垂向加速度平均減搖效果為35.0%,15.7%,26.3%;航速24kns時,縱搖運動平均減搖效果為34.2%,垂蕩運動平均減搖效果為11.2%,首部19站垂向加速度,重心垂向加速度,尾部1站垂向加速度平均減搖效果為38.6%,24.5%,21.4%。可以發(fā)現(xiàn),航速越高,V2船型的減搖效果越明顯。
5 結(jié) 語
本文以數(shù)值計算為主要技術(shù)手段,開展了基于快速性的首升力體、首鰭/尾板組合與船體之間的水動力干擾與匹配研究,獲得了快速性和耐波性均優(yōu)良的復(fù)合優(yōu)化船型方案,得到主要結(jié)論如下:
(1)加裝首升力體、首鰭/尾板后,盡管增加了濕表面積,增大了復(fù)合船型摩擦阻力,但通過利用首升力體、首鰭/尾板組合與船體之間的有利波系干擾和有效匹配,減小了復(fù)合船型的壓阻力,最終降低了復(fù)合船型的總阻力,與光體相比,復(fù)合初步船型方案減阻最大可達7%,復(fù)合優(yōu)化船型方案減阻最大可達14%;
(2)加裝首升力體、首鰭和尾板復(fù)合優(yōu)化船型的耐波性能明顯優(yōu)于光體,波長在0.75~1.5倍船長時,縱向減搖效果最為明顯;且航速越高,復(fù)合優(yōu)化船型方案V2的減搖效果越明顯。本文的研究成果可為后續(xù)首升力體在單體船上的應(yīng)用提供技術(shù)支撐。
[1]洪 超,陳瑩霞.船舶減搖技術(shù)現(xiàn)狀及發(fā)展趨勢[J].船舶工程,2012(S2):236-244.Hong Chao,Chen Yingxia.Current situation and tendency of development of ship stabilizer technique[J].Ship Engineering,2012(S2):236-244.
[2]Hart C J,Weems K M,Peltzer T J.Seakeeping analysis of the lifting body technology demonstrator sea flyer using advanced time-domain hydrodynamicsC]//Ninth International Conference on Fast Sea Transportation.Shanghai,China,2007.
[3]Hackett J P,Pierre J C S,Bigler C,et al.Computational predictions vs.model testing for a high speed vessel with lifting bodies[J].Transactions-Society of Naval Architects and Marine Engineers,2007,115:163-180.
[4]Loui S,Shimozono G,Keipper T.Low drag submerged asymmetric displacement lifting body:U.S.Patent 7,004,093[P].2006-2-28.
[5]Navatek,ltd.Lifting body technology for transformational ship designs[C].9th Naval Platform Technology Seminar,2003.
[6]Peltzer T J,Keipper T S,Kays B,et al.A new paradigm for high-speed monohulls:the bow-lifting-body ship[C]//Proceedings,Ninth International Conference on Fast Sea Transportation.Shanghai,China,2007.
[7]趙連恩,謝永和.高性能船舶原理與設(shè)計[M].第一版.北京:國防工業(yè)出版社,2009.
[8]Engle A,Lien V,Hart C.Seakeeping evaluation and loads determination of a high-speed hull form with and without a bow-lifting-body[J].FAST,2011.
[9]吳乘勝,朱德祥,顧 民,等.數(shù)值波浪水池及頂浪中船舶水動力計算[J].船舶力學(xué),2008,12(2):168-179.Wu Chengsheng,Zhu Dexiang,Gu Min,et al.Computation of hydrodynamic forces for a Ship in regular heading waves by a viscous numerical wave tank[J].Journal of Ship Mechanics,2008,12(2):168-179.
[10]王許潔,孫樹政,趙曉東,等.千噸級高耐波性單體復(fù)合船型模型試驗研究[J].船舶力學(xué),2011,15(4):180-187.Wang Xujie,Sun Shuzheng,Zhao Xiaodong,et al.Research on model test of thousands-tons class high seakeeping performance hybrid monohull[J].Journal of Ship Mechanics,2011,15(4):180-187.
[11]吳乘勝,陳 雄,孫立憲,等.靜水中自由船模拖曳CFD模擬方法研究[J].船舶力學(xué),2010,14(8):823-833.Wu Chengsheng,Chen Xiong,Sun Lixian,et al.Numerical simulation of free ship model towed in still water[J].Journal of Ship Mechanics,2010,14(8):823-832.
[12]邵世明,王云才.尾壓浪板對高速艇阻力性能的影響[J].中國造船,1981,1:31-41.Shao Shiming,Wang Yuncai.The effects of stern trimming flap on resistance of high speed craft[J].Shipbuilding of China,1981,1:31-41.
Research on hydrodynamic interaction and matching of bow-lifting-body,fin/stern flap and hull
WANG Xi-jian,WU Bao-shan,ZHOU De-cai,QIU Geng-yao,GAO Lei,LAN Bo
(China Ship Scientific Research Center,Wuxi 214082,China)
Lifting body technology was demonstrated-via computational fluid dynamics,scale-model tests,and full-scale at-sea trials-to provide reduced motions at zero and loiter speeds,which can improve ship seakeeping performance.With numerical calculation and scale-model test verification,this paper makes a research on hydrodynamic interaction and matching of bow-lifting-body,fin/stern flap and hull.The numerical simulation method of free ship model towed in still water is adopted.Research on position between bow-lifting-body and hull is carried out and the better position is obtained.With the fin installed on the bow-lifting-body,hydrodynamic interaction of bow-lifting-body,fin and hull is analysed.And the preliminary scheme of hybrid monohull is obtained.With the stern flap installed on the preliminary scheme,hydrodynamic interaction of bow-lifting-body,fin,stern flap and hull is discussed.And the optimization scheme of hybrid monohull is obtained.Finally,numerical prediction of motion responsein regular waves and comparative analysis of the optimization scheme are carried out.The stabilizing effect of hybrid monohull is also predicted.The results in the paper can be applied to the research of monohull with bow-lifting-body in the future.
bow-lifting-body;hydrodynamic interaction;motion response
U661.1
A
10.3969/j.issn.1007-7294.2017.11.003
1007-7294(2017)11-1336-12
2017-05-23
王習(xí)建(1990-),男,碩士,工程師,E-mail:380678482@qq.com;
吳寶山(1968-),男,博士,研究員。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30