單軸旋轉慣導系統加速度計零偏誤差靜基座標定濾波算法?
2017-11-28 01:57:57尹偉偉李方能
艦船電子工程 2017年10期
關鍵詞:系統
尹偉偉 李方能
(1.中國人民解放軍902廠 上海 200030)(2.海軍工程大學導航工程系 武漢 430033)
單軸旋轉慣導系統加速度計零偏誤差靜基座標定濾波算法?
尹偉偉1李方能2
(1.中國人民解放軍902廠 上海 200030)(2.海軍工程大學導航工程系 武漢 430033)
旋轉調制工作模式下,加速度計零偏誤差導致慣導系統姿態誤差呈周期性變化,影響船用慣導系統姿態精度。為原位標定加速度計零偏誤差,根據姿態角誤差法推導了濾波方程,在駐排條件下可以準確估計加速度計零偏,明顯降低姿態誤差。實測數據表明,濾波算法駐排條件下姿態精度為0.15角分。
單軸旋轉;標定;加速度計零偏;原位
1 引言
與其他應用領域的慣導系統相比,船用慣導系統的特點是連續工作時間長,導航精度要求高。為了滿足艦船導航高精度長航時的自主性和隱蔽性的需求,提高慣導系統長航時精度成為國內外研究熱點。國外一方面研制新型慣性元件提高現有慣性器件精度,另一方面于20世紀60年代開辟了另一條技術途徑,基于現有陀螺的精度,采用旋轉調制技術使慣導系統獲得較高的精度[3]。20世紀90年代,Sperry公司先后研制出MK39型和AN∕WSN-7船用旋轉激光陀螺慣導系統,成為美國水面艦艇和各級攻擊潛艇的標準設備。由于旋轉調制技術研究較晚,國內還沒有旋轉激光陀螺慣導系統的船用報道。旋轉慣導系統誤差標校相關研究成果主要集中于原理的分析和仿真[4~10]。
單軸旋轉慣導系統繞方位軸旋轉,加速度計零偏誤差隨旋轉投影到導航系,導致姿態誤差呈周期性變化。高精度誤差標校通常需要進船塢,在駐排狀態下實施或將慣導拆卸使用轉臺等測試設備標校,標校過程復雜且耗時,對標校環境和操作人員素質的要求都比較高。論文提出一種加速度計零偏誤差原位標定濾波算法,可以在駐排條件下準確標定標定加速度計零偏誤差,有效降低旋轉慣導系統姿態誤差,滿足船用慣導系統現場標定的需求。
2 標定濾波算法
選取東-北-天(ENU)地理坐標系為導航坐標系n,定義慣導系統旋轉機構坐標系為p系,轉動零位置的p系為 p0系,p系相對 p0系的旋轉角為α(t)。慣導系統體坐標為b系,b系相對真北方向的當前方位角為φ。γ、θ為船體橫搖角和縱搖角。
Ψ角誤差模型的速度誤差方程為[3]
忽略地球自轉角速度、導航系轉動角速度以及重力矢量測量值差異。在駐排狀態下,船體速度為零。在系泊狀態下,船體速度很小,忽略兩套系統速度測量值差異。則式可以簡化為
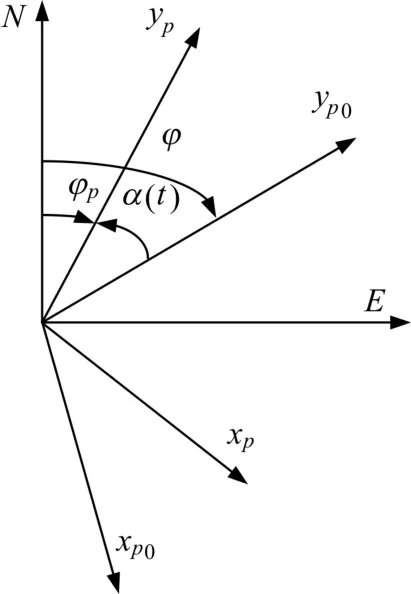
圖1 旋轉方位角、方位角與平臺轉動角間的關系

3 實驗驗證
如圖2所示,在駐排狀態慣導系統監控儀顯示姿態角原始誤差(峰峰值)為12角分。根據論文提出的濾波算法編寫標定軟件,可以得到加速度計x軸和y軸零位估計曲線,分別如圖3和圖4所示。
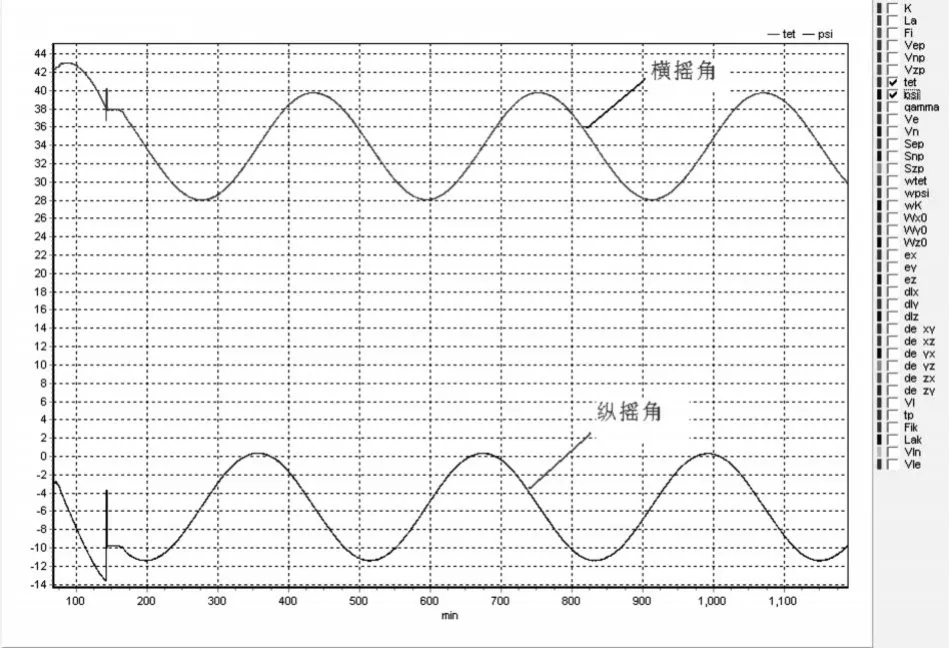
圖2 駐排狀態姿態實測曲線

圖3 加速度計x軸零位曲線
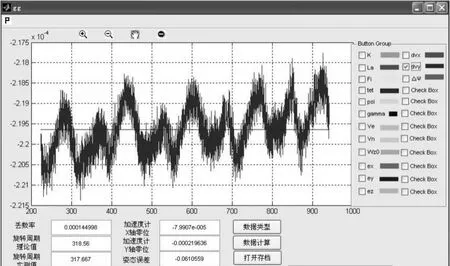
圖4 加速度計y軸零位曲線
加速度計軟件標定結果:-7.9907e-5,-2.1964e-4。加速度計零偏誤差標校后,姿態誤差由12角分提高至0.15角分(峰峰值)。
4 結語
1)論文提出的濾波算法能夠實現原位標校,實測數據表明滿足現場標校的需要。
2)濾波算法在駐排狀態可以準確估計加速度計零偏誤差,有效降低姿態誤差。
[1]張倫東.船用激光陀螺慣導系統旋轉調制與誤差標校技術研究[D].長沙:國防科技大學,2013:8-12.
[2]Jizhou Lai,Ling Zhang,Jianye Liu,et al.Improved environmentfunction to separate andcompensate the errors in rotating SINS[J]. 中國慣性技術學報,2013,21(1):16-21.
[3]高鐘毓.慣性導航系統技術[M].北京:清華大學出版社,2012:11-15.
[4]許江寧,查峰,李京書,等.單軸旋轉慣導系統“航向耦合效應”分析與補償[J].中國慣性技術學報,2013,21(1):26-30.
[5]查峰,許江寧,黃寨華,等.單軸旋轉慣導系統旋轉性誤差分析及補償[J]. 中國慣性技術學報,2012,20(1):11-17.
[6]賴際舟,呂品,張玲,等.旋轉慣導系統中的圓錐誤差分析及其補償[J].南京航空航天大學學報,2012,44(2):159-164.
[7]Xudong Yu,Yu Wang,Guo Wei,et al.NovelTemperature modeling and compensation method for bias of ring laser gyroscopebased on LS-SVM[J].Chinese Optics Letters,2011,9(5):05-12.
[8]袁保倫,饒谷音,廖丹.旋轉式慣導系統的標度因數誤差效應分析[J]. 中國慣性技術學報,2010,18(2):160-164.
[9]于旭東,王宇,張鵬飛,等.單軸旋轉慣導系統在晃動基座上的建模及誤差分析[J].傳感技術學報,2009,22(2):289-292.
[10]陳永冰,鐘斌.慣性導航原理[M].北京:國防工業出版社,2007:1-5.
Accelerometer Bias Error Calibration Filter Algorithm for INS with Single Axis Rotation
YIN Weiwei1LI Fangneng2
(1.Chinese PLA 902 Factory,Shanghai 200030)
(2.College of Electrical Engineering,Naval University of Engineering,Wuhan 430033)
Due to the azimuth rotation,the attitude error is modulated into a sine or cosine signal.The platform tilt-angle is caused by the accelerometer bias residual error in levelling loop.The roll and pitch are typical sine or cosine signal in static status.In order to calibrate accelerometer bias error in situ,the project utilizes attitude error,and proposes accelerometer bias error calibration algorithm of inertial navigation system.The effectiveness of proposed algorithm is verified and evaluated understatic conditions.The experimental results shows attitude error can be reduced to 0.15 arc-min.
single axis rotation,calibration,accelerometer bias error,in situ
U666.1
10.3969∕j.issn.1672-9730.2017.10.010
Class Number U666.1
2017年4月4日,
2017年5月25日
國家自然科學基金(編號:41274013)資助。
尹偉偉,男,碩士,高級工程師,研究方向:導航技術。李方能,男,博士,副教授,研究方向:導航技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
