TMS320C6678的動目標檢測技術研究*
2017-11-24 11:53:06,,,
單片機與嵌入式系統應用 2017年11期
關鍵詞:檢測
,,,
(國防科學技術大學 ATR重點實驗室,長沙 410073)
TMS320C6678的動目標檢測技術研究*
王海松,王培早,蘇陽,張月
(國防科學技術大學 ATR重點實驗室,長沙 410073)
提出了一種距離分段動目標檢測的方法。對近距離目標使用傳統的MTD算法,而對遠距離目標使用基于Keystone快速變換的相參積累算法來解決越距離單元走動問題。該方法不僅有效補償了遠距離目標的越距離走動,而且能夠有效的降低多核DSP的運算量。通過設計8片TMS320C6678處理器平臺對外場實時數據的處理與分析, 驗證了本文方法的有效性, 可以用于泛探雷達的目標檢測。
泛探雷達;距離走動;MTD;Keystone;相參積累;TMS320C6678
引 言
隨著高速飛行器技術的發展,飛機、導彈等目標的RCS減小了一到兩個數量級, 極大地影響了雷達威力[1]。因此,對微弱目標的檢測成為雷達亟待解決的技術問題。增加積累時間是提高雷達微弱目標檢測能力的一種重要手段,而在長時間相參積累過程中目標的運動會導致越距離走動[2]和多普勒頻移,嚴重影響目標的檢測效果。運用Dechirping、Wigner-Hough[3]和分數階傅立葉變換法[4]等方式都是以目標不出現越距離單元走動為前提的,對于越距離、多普勒單元走動同時存在的情況,需要對兩種走動同時進行補償。但對于遠距離、多波束實時目標的檢測,這些方法運算量較大,工程化實現難度較高。
因此本文提出距離分段[5]檢測的方法,即對近距離目標使用傳統MTD方法,對遠距離目標使用快速Keystone變換[6]的長時間積累算法,解決距離走動問題。本文設計了集成8片TMS320C6678的處理器平臺,驗證該方法能夠對遠距離目標進行有效的距離走動補償,同時降低了處理器的運算量。
1 TMS320C6678處理器平臺設計
1.1 系統設計需求
當相參積累的幀數取決于積累時間和雷達時序時,探測距離與積累時間的關系主要取決于雷達系統指標。圖1為雷達時序圖。

圖1 雷達工作時序
該雷達樣機的脈沖發射周期為700 μs,為了滿足雷達設計指標,對探測距離進行分段處理,一種可行的分段方法如表1所列。
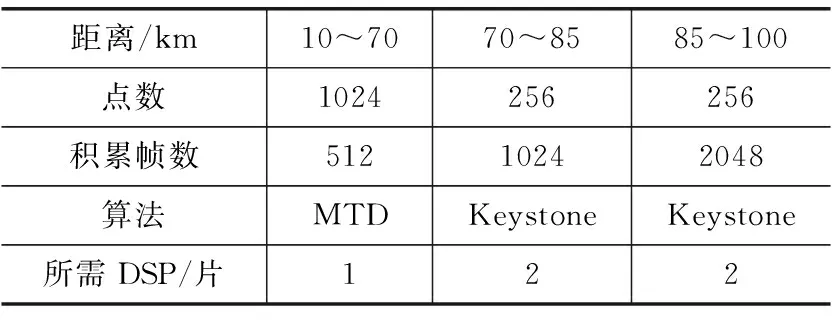
表1 距離分段和算法設計
第一段檢測距離為10~70 km,積累幀數為512,積累時間為0.35 s(700 μs×512)。由于積累時間較短,所以這段距離可忽略越距離走動,因此常規的MTD算法滿足檢測需求。第二段檢測距離設置為70~85 km,積累幀數為1 024,積累時間為0.7 s,而對于更遠的第三距離段,為了提高微弱目標的檢測能力,采取增加積累時間的方法來提高信噪比[7],積累幀數為2 048,積累時間為1.5 s。在70~100 km這段距離內,必須考慮距離走動,因此在針對第二、三段遠距離檢測時,采用Keystone變換對距離走動進行補償。
1.2 信號處理器設計
為了實現泛探雷達[8]同時多波束的接收,需要對16個波束的數據同時進行處理,檢測距離為10~100 km,這就要求處理平臺具有浮點運算、多核架構、高速大容量緩存等特點。而且由表1可知,本文分段方法至少需要5片TMS320C6678處理器來完成。基于這一需求,設計了VPXC6678x8信息處理板卡,如圖2所示。
圖2 VPXC6678x8板卡
板卡以8片TI的8核 TMS320C6678處理器作為處理核心,TMS320C6678 DSP是基于TI最新多核架構的高性能浮點處理器,內部集成C66x DSP內核,單片運算能力可達到160 GFLOPS。8片DSP通過Serial Rapid IO(SRIO)接口與VPX背板相連,雷達回波數據經過上一級DBF處理后,由背板通過SRIO協議根據需求分發給8片DSP,SRIO理論帶寬為5 Gbps,完全滿足對窄帶雷達回波2.5 MHz采樣率的傳輸要求。DSP通過SRIO與主板相連,DSP的檢測結果通過SRIO接口上傳到主板,主板通過SRIO給DSP發送指令。板卡的結構如圖3所示。
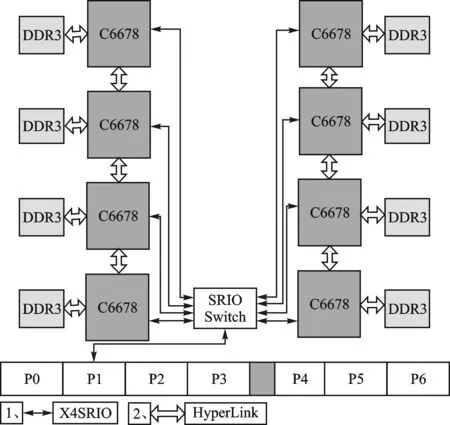
圖3 DSP板卡結構
2 動目標檢測算法的設計
2.1 基于MTD算法的動目標檢測
針對第一距離段的目標,主要包括無人機、汽車、輪船等低速目標,可以忽略距離走動帶來的影響,利用MTD算法來進行處理,從而在RD平面檢測到目標。但是由于多普勒頻移的影響,很難從RD平面上得到準確的目標速度。需要結合后續的目標跟蹤處理去除速度混疊,才能得到目標的真實速度。具體流程如圖4所示。
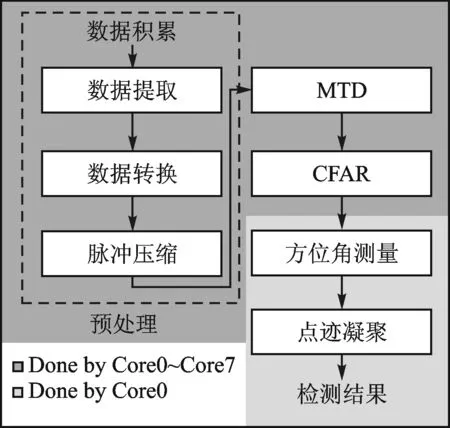
圖4 常規MTD處理流程
數據預處理包括數據提取、數據轉換、脈沖壓縮三個部分。雷達回波每一幀數據包含1500個點,數據提取主要對應的是距離分段,即將一幀數據分成1024、256和256三段。數據轉換是將FPGA傳送過來的16字節整型數據轉換為32字節浮點數據進行處理。數據轉換之后需要對每一幀數據進行脈沖壓縮,主要是匹配濾波的過程。脈沖壓縮后進行MTD處理,主要是對同一距離單元上512點慢時間數據進行加窗、FFT運算,提取速度信息。MTD后得到二維的RD平面,采用恒虛警率(CFAR)提取RD平面中的目標,再采用和差波束測角原理[9]測量目標的方位角。點跡凝聚用于將屬于一個目標的點凝聚成一個點,提高距離精度。為滿足實時檢測的要求,處理器必須在0.35 s內完成512幀積累數據的處理。經過測試,對一個波束處理需要0.1 s,因此將16個回波波束分給8個核,每個核處理兩個波束的數據,最后每個核的處理結果匯總到核0進行方位角測量和點跡凝聚處理。
表2所列為算法每一步耗時統計,測得每個核處理兩個波束的時間為0.25 s左右,滿足實時處理的要求。
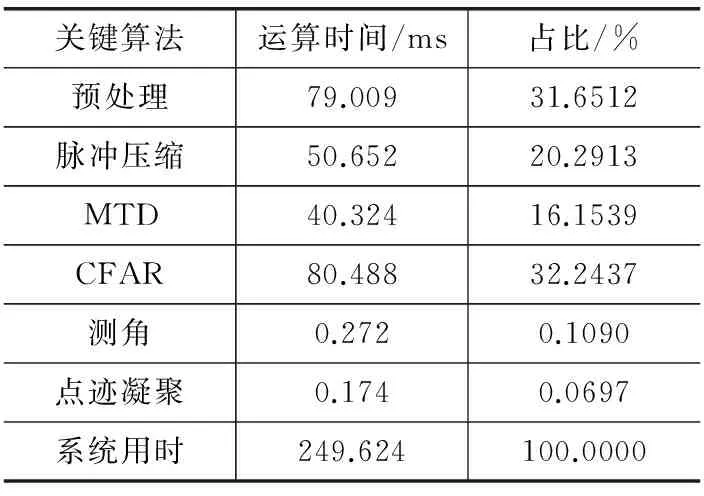
表2 MTD算法耗時統計
2.2 基于快速Keystone變換的長時間積累
Keystone變換的實質是對快時間頻域在慢時間維進行重采樣,根據Nyquist采樣定理,重采樣可用sinc函數插值法實現,雖然是一維變換,但運算量很大,而且插值矩陣占據了大量的存儲空間,為便于實現,必須采用運算量較小的方法。參考文獻[10]提出一種快速變換尺度的方法來替代sinc插值法。
雷達發射信號可表示為:

其中,t表示時間,Tr為脈沖重復周期,fc為載頻,st(t)為線性調頻信號。
根據“停-跳”模型,運動目標回波信號可表示為:
其中,tm=mTr為慢時間維,t′=t-tm為快時間維,r(tm)表示目標在tm時刻與雷達的距離。
假設目標以恒定徑向速度運動,那么r(tm)= r0+vtm,可得:
sr(t′,tm)=
對上式在快時間維進行Fourier變換得:
Sr(f,tm)=

Sr(l,m)=

將虛擬慢時間τm離散采樣的序號用m′表示,設其采樣點的總數也為M,與τm相對應的虛擬離散多普勒域采樣點的順序用k′表示,其總數為K′(K′=K=M)。應當指出的是m′與m,以及k′與k雖然同樣以整數值表示,但它們的尺度是不同的,且對于不同的l(即不同的f)有不同的尺度關系。
為了從Sr(l, m)得到Sr(l, m′),即完成Keystone變換,可以先通過Fourier變換將Sr(l, m)變換到Sr(l, k′) (k′是與m′相對應的離散多普勒域),然后再通過Fourier反變換,變換到Sr(l, m′)。應當指出的是,前一個變換的時頻域之間具有不同的尺度,Fourier變換不能用FFT,只能用DFT對各個k′的值逐個計算;而后一個Fourier反變換則可采用IFFT,其變換過程如下:
Sr(l,m′)=
可以看出,快速Keystone變換可以有效地減小運算復雜度,便于工程化實現。根據雷達系統特性和目標特性,Keystone變換對每個波束劃分出7個多普勒通道,每個通道需要進行MTD處理,大大增加了算法復雜度和計算量。Keystone變換與常規MTD相比需要處理多個通道,這就要求對多普勒通道進行準確補償。處理結果存在誤差可能因為多普勒尋優只是取了最大值。因此在處理過程中必須結合更多精確特征完成多普勒通道尋優,提取通道補償效果最好的通道。
圖5為Keystone處理流程。由圖5可知Keystone變換處理流程與常規MTD基本相同,只是在數據預處理部分多了Keystone變換,算法中多了通道尋優處理。Keystone變換主要是針對每幀數據1024點之后的數據,對應的距離是第二、三段距離。為了減少運算量,第二段距離積累1024幀,每一幀256點,Keystone變換對每個波束劃分出7個多普勒通道,那么處理的數據量為256×1024×7,數據量為常規MTD的3.5倍。第三段距離積累2048幀,每一幀256點,數據量為256×2048×7,數據量為常規MTD的7倍。
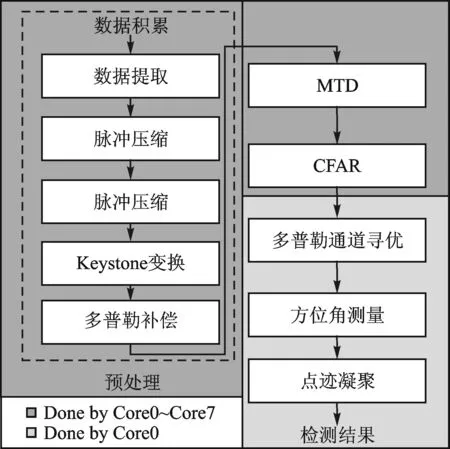
圖5 基于Keystone變換檢測流程
表3是Keystone變換每步算法運行的時間,要滿足實時性的要求,第二、三段分別在0.7 s、1.4 s內檢測完。單核處理兩個波束需2.5 s左右,所以一個核只處理一個波束,16個波束則需要2個DSP處理器。這兩段距離需要4個DSP處理器,滿足設計要求。

表3 Keystone變換算法耗時
3 實驗結果分析
3.1 基于MTD目標檢測結果分析
外場實驗結果的二維平面如圖6所示,橫坐標是距離維,縱坐標是多普勒維。

圖6 RD平面
通過對外場目標檢測結果分析來看,對于近距離目標,常規MTD算法可以準確地定位到目標。常規MTD檢測算法運算量小,算法簡單,易于在DSP處理器中實現。然而,常規的MTD算法也存在一定的缺陷。圖7所示為三維RD平面,可以看出信噪比明顯偏低,因為采用CFAR會造成信噪比損失。

圖7 三維RD平面
3.2 基于Keystone變換檢測結果分析
圖8所示為第三段距離數據MTD的檢測結果,從圖中可以看出多普勒頻移不明顯,然而距離走動接近0.6 km。

圖8 距離走動
為了對距離走動進行有效補償,算法中對7個多普勒通道進行補償,如圖9所示,從實驗結果中可以看出,在第4個多普勒補償通道對回波進行了有效的補償。所以,Keystone快速變換對回波數據進行處理,能夠有效地補償由于長時間積累帶來的距離走動問題。Keystone變換后,再經過補償通道擇優檢測、方位角測量和點跡凝聚,就可以在回波數據中檢測出有效的目標信息。
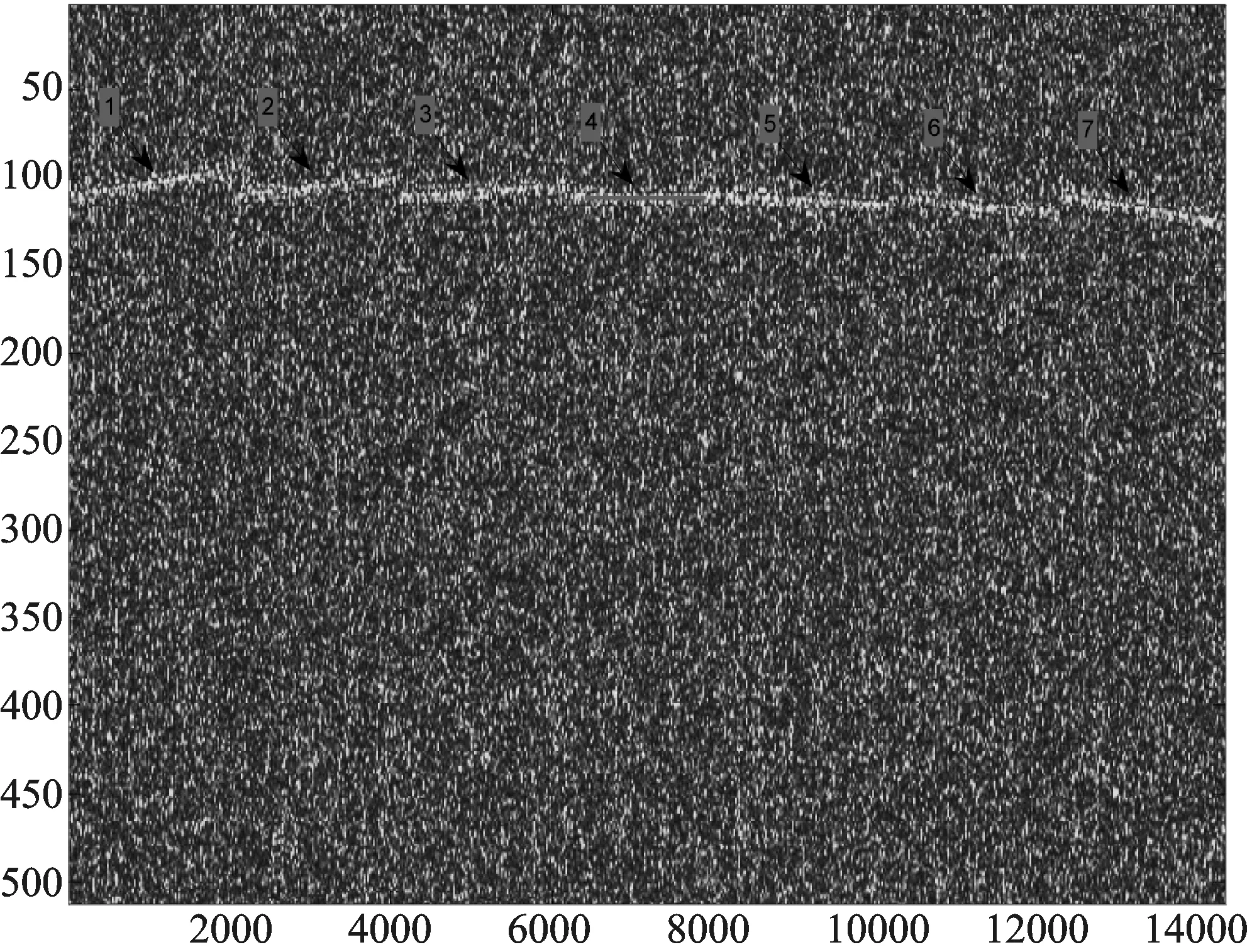
圖9 通道補償結果
結 語
傳統的MTD算法運算復雜度很小,可以快速地將目標提取出來,然而因為長時間積累造成距離走動,不能滿足雷達系統的需求。采用Keystone變換可以消除距離走動帶來的影響,但是會增加算法的復雜度,尤其在高數據率和幀數增加的情況下,因此需要更高速率的處理器平臺來實現。本文從工程實踐出發設計了一種基于8片TMS320C6678的高速信號處理板,設計了距離分段動目標檢測算法在多核DSP上的任務分配方法,實現實時目標檢測處理流程。最后給出外場試驗結果及分析,充分驗
[1] 趙杰,郭德明,陳果,等.基于改進 Keystone變換的高速目標相參積累方法[J].現代雷達,2016,38(4):34-37.
[2] 吳兆平,吳惠洋,蘇濤.距離-多普勒-時間三維雷達數據中的目標能量積累[J].系統工程與電子技術,2013,35(1): 68-72.
[3] LiuFeng,Sun Dapeng,Tao Ran,et al.Multi-component LFM Signal Feature Extraction Based on Improved Wigner-Hough Transform[C]//4th International Conference on Wireless Communications,Networking and Mobile Computing,2008: 14.
[4] 武其松,邢孟道,保錚.雙通道MIMO-SAR運動目標成像[J].系統工程與電子技術,2010,32(5): 921-926.
[5] 崔春雷,張月,郭瑞,等.基于多核DSP 的動目標檢測算法的設計與實現[J].科學技術與工程,2016,16(23): 208-212.
[6] 王姣,李明,陳洪猛.基于Keystone變換的多目標距離走動校正[J].雷達科學與技術,2012,10(6): 663-667.
[7] 武洋,夏忠婷.低信噪比下基于Keystone變換的高速多目標檢測[J].計算機與數字工程,2016,44(4): 625-629.
[8] Skolnik M.Opportunities in Radar-2002[J].Electronics and Communications Engineering Journal,2002,14(6):263-272.
[9] 許京偉,廖桂生,朱圣棋.基于幅相線性約束的自適應和差波束形成方法研究[J].電子學報,2013,41(9): 1724-1729.
[10] Xing Mengdao,Lan Jinqiao,Bao Zheng,et al.ISAR ecchoes coherent processing and imaging[J].電子學報:英文版,2004,3(2):187-193.
王海松(碩士研究生),主要研究方向為雷達系統波形產生和雷達信號處理;王培早(碩士研究生),主要研究方向為雷達信號處理和紅外目標成像;蘇陽(碩士研究生),主要研究方向為高速數據采集與存儲;張月(講師),主要研究方向為高速數據采集和雷達信號處理。
ResearchonMovingTargetDetectionTechnologyBasedonTMS320C6678
WangHaisong,WangPeizao,SuYang,ZhangYue
(Key Laboratory of Automatic Target Recognition,National University of Defense Technology,Changsha 410073,China)
In the paper,a new method of segmentation of long distance for moving target detection is proposed.The common MTD algorithm is used for detection for the close distance target,and the Keystone algorithm is used to compensate for walking distance problem caused by coherent integration for long distance target.The experiment results show that this method can effectively reduce the computation as well as make compensation for range migration problem.It is verified by the outfield experimental data processing on processor platform of 8-chip TMS320C6678.It can be used for target detection of ubiquitous radar.
ubiquitous radar;range migration;MTD;Keystone;coherent integration;TMS320C6678
國家級-國家自然科學基金(61571449)。
TN957
A
2017-08-21)
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48