嵌入式腦機接口系統設計
2017-11-22 07:28:29堯俊瑜鄔長杰
現代計算機 2017年29期
堯俊瑜,鄔長杰
(西華大學計算機與軟件工程學院,成都610039)
嵌入式腦機接口系統設計
堯俊瑜,鄔長杰
(西華大學計算機與軟件工程學院,成都610039)
根據運動起始視覺誘發電位(mVEP)的信號特征,設計一套基于mVEP的實用化在線嵌入式腦-機接口(BCI)系統。該系統可以提取出相關腦電信號,解碼識別,轉換為對應的控制指令,從而建立起大腦和設備之間的通信,實現人機交互。
0 引言
所謂腦-機接口是指不依賴大腦的正常輸出通路(即外周神經系統和肌肉組織)就可以實現人腦和計算機或其他電子設備直接通信[1]。腦-機接口系統可用于可穿戴設備開發、娛樂設備開發、殘疾人輔助設備開發等應用中,特別是在運動輔助上具有重要的應用潛力。
目前國內外所研究的腦機接口主要是基于神經元的放電活動。目前常用于腦機接口的誘發腦電信號有穩態視覺誘發電位(Steady-State Visual Evoked Poten?tial,SSVEP)、P300電位以及運動起始視覺誘發電位(motion-onset Visual Evoked Potential,mVEP)等。在所有與運動相關的視覺誘發電位中,mVEP擁有最小的被試間差異和被試內差異以及最大的幅度[2],所以本文采用運動起始視覺誘發電位作為腦機接口的輸入信號。在研的腦-機接口系統大多數是基于PC平臺的,PC體積較大,便攜性差,這給腦-機接口系統的應用帶來一定的影響。本文研究設計一套基于mVEP腦電信號的嵌入式腦機接口系統,通過8名受試者對該系統分別進行測試。測試結果表明該系統能準確采集并識別到腦電信號,然后準確發出控制指令,驗證了該系統的穩定性與可行性。
1 方法
1.1 系統總體方案
本文所設計的mVEP-BCI由刺激模塊、信號采集模塊、特征提取模塊、模式識別模塊以及控制輸出模塊組成,系統框架圖如圖1所示。腦電放大器采集腦電信號,通過藍牙將數據發送給處理器,經過特征提取和模式識別后解析出被試意圖,然后用于對外圍設備的控制,并反饋給被試。
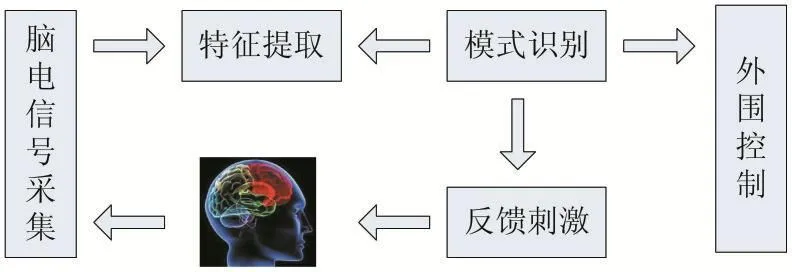
圖1 系統框架圖
1.2 系統硬件設計
主要由兩個部分組成,一是信號采集部分,另一部分是信號處理部分。具體如下:
信號采集部分如圖2所示:腦電放大器的主控為STM32,負責腦電信號的采集,將腦電信號經過AD轉換后,通過藍牙發送到開發板。嵌入式硬件部分采用Ti?ny6410開發板,Tiny6410是一款以ARM11芯片(三星S3C6410)作為主處理器的嵌入式核心板,內部集成了強大的多媒體處理單元,因而擁有比較高的圖像處理能力。并配有一塊7寸的LCD觸控屏用于實時顯示。
1.3 系統軟件設計
(1)嵌入式系統搭建
在本文中,嵌入式硬件部分使用的友善之臂Ti?ny6410開發板,友善之臂公司提供配套的BootLoad?er--Superboot-6410,所以,這里不再重新制作。在本文中,嵌入式Linux操作系統如圖3所示,搭建系統主要包括Linux內核的裁剪、文件系統的制作、QT庫的移植三個部分。

圖2 系統硬件框圖
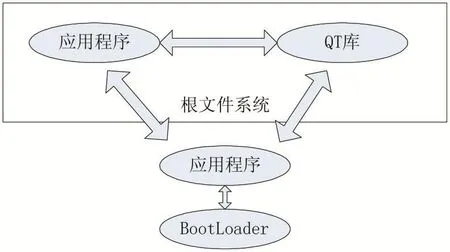
圖3 嵌入式Linux系統框架
(2)應用系統設計
應用系統主要包括刺激模塊、征提取模塊、模式識別模塊以及控制輸出模塊,系統采用多線程編程的方式。將按照圖4的方式進行數據處理。首先對采集的腦電數據進行預處理,包括濾波和特征提取。由于線性分類器(LDA)的高效率和易實現的特征,我們選擇LDA作為分類器。線性判別函數可以表達為:

其中,X代表特征向量,y(X)是特征相關的標簽,w是加權向量,w0是偏置項。由于X和y(X)已知,和可由最小二乘法估算得出[3]。得到的LDA的參數將用于在線測試中區分目標和非目標。將數據用LDA分類器訓練出分類模型,然后在實時測試中用所得到的分類器進行識別。
2 實驗結果
2.1 數據采集
為了測試本系統數據采集程序的運行狀況,我們將腦電放大器的數據采集端口接上心電模擬器,運行波形顯示程序,從圖5中可知,界面顯示的心電信號與輸入的信號相符,由此可得,本文編寫程序能夠正常讀取腦電放大器的數據,波形顯示程序能夠正常顯示波形。
2.2 mVEP信號采集測試
為了驗證本系統的運動起始刺激界面的刺激效果以及腦電放大器的性能,我們隨機選取了的4名被試來進行運動起始視覺刺激實驗,采集mVEP信號。由于mVEP信號比較微弱,會淹沒在自發腦電中3。為了提高mVEP信號的信噪比,我們將50次運動起始刺激對應的腦電信號進行疊加平均,然后將疊加平均后的目標刺激和非目標刺激對應的mVEP信號一起繪制于坐標軸中。最后的實驗結果如圖6所示,其中紅色實線表示由目標刺誘發的mVEP信號,藍色虛線表示由非目標刺激誘發的mVEP信號,從圖中可以看出,目標刺激誘發出來的mVEP信號具有比較明顯的N2成分和P2成分,其和非目標刺激誘發的mVEP信號具有比較大的區別,由此可以得出本系統的運動起始刺激界面具有比較好的刺激效果,本系統的腦電放大器能采集到mVEP信號。
2.3 實時控制測試
為了驗證本嵌入式腦機接口系統的實際控制效果,選取了8名被試進行腦機接口實驗。實驗要求被試根據主試的指示執行60次控制任務(上下左右各15次),控制刺激界面如圖7所示,被試控制中間區域的藍色方塊上下左右移動,并將控制結果記錄下來,待60次控制任務完成后,得出任務準確輸出的次數,最后計算出控制的準確率。如表1所示,由于被試間差異,被試控制命令執行的準確率最低為78.3%,最高為90.0%,平均準確率為85.2%,該嵌入式腦機接口系統具有較好的控制效果。
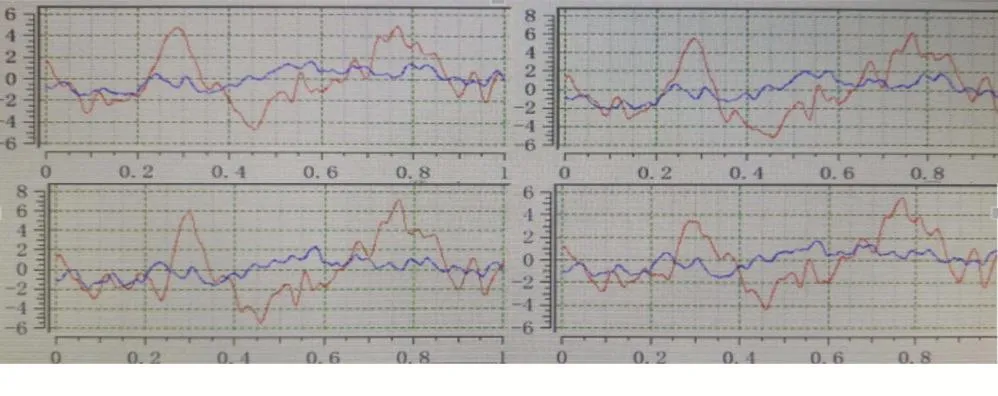
圖6 mVEP信號圖
3 結語
腦機接口的發展越來越火熱,應用前景廣泛。但是,目前在研的BCI系統大多依賴于基于PC平臺,PC體積較大,便攜性差,這就給腦機接口的實際應用帶來了一定的限制。基于此,本文在經過大量調研后,研究設計了一種基于嵌入式腦機接口系統,并對整個系統整體性能進行了測試,測試結果表明該腦機接口系統能實現基本的控制任務,滿足基本的應用需求。
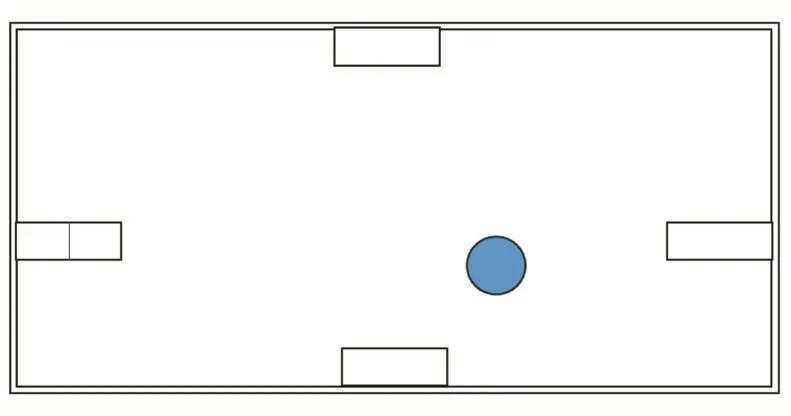
圖7 控制刺激界面圖
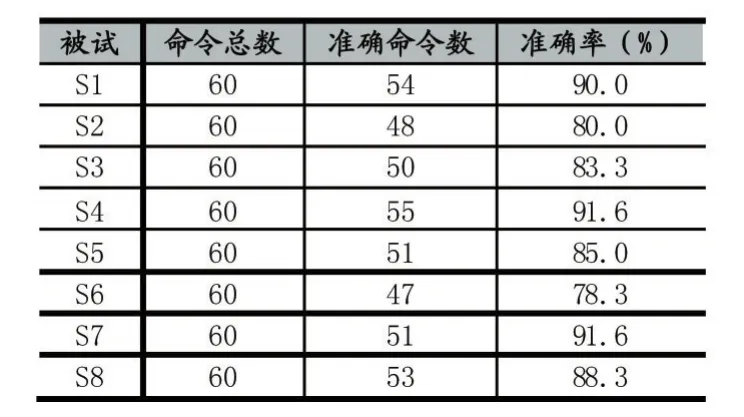
表1 嵌入式腦機接口系統測試結果
[1]陳瑞.基于mVEP的腦-機接口關鍵技術研究[D].成都:電子科技大學,1-26.
[2]劉濤.基于運動起始視覺響應的在線實用化腦-機接口[D].北京:清華大學,2010:1-10.
[3]雷旭,堯德中.同步腦電-功能磁共振(EEG-fMRI)原理與技術[M].科學出版社,2014:16-26.
堯俊瑜(1993-),男,重慶人,碩士,研究方向為計算機科學與技術
2017-06-06
2017-10-10
BCI;mVEP;Embedded
Design of Brain-Computer Interface Based on Embedded System
YAO Jun-yu,WU Chang-jie
(College of Computer and Software Engineering,Xihua University,Chengdu 610039)
Based on the signal characteristics of motion-onset visual evoked potential(mVEP),realizes a practical online embedded Brain-computer interface(BCI)system based on mVEP,designs a BCI system which is based on embedded processor.The system can extract the relevant EEG signal,decoding identification,conversion to the corresponding control instructions,thus establishing the communication between the brain and the device to achieve human-computer interaction.
腦-機接口系統;運動起始視覺誘發電位;嵌入式
1007-1423(2017)29-0082-03
10.3969/j.issn.1007-1423.2017.29.020
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25