新型角加速度測量系統及其在旋轉機械中的應用
2017-11-21 11:32:02
傳感器世界 2017年3期
嘉興學院南湖學院,浙江嘉興 314001
一、引言
隨著科學技術的不斷進步和生產發展的各種需要,角加速度測量技術在工業、航空航天、農業、軍事等多個領域獲得了廣泛的應用[1-2]。例如汽車上安裝的翻車抑制裝置,需要時刻檢測車身的傾角角加速度,來判斷是否需要采取安全措施[3];在飛彈控制系統設計中,利用角加速度傳感器組成的捷聯慣導控制系統,可用于控制導彈的飛行狀態[4];在新型小衛星姿態控制技術中,可采用角加速度傳感器來測量小衛星的高姿態抖動[5];采用角加速度傳感器來檢測硬盤的轉動沖擊和振動,并將檢測到的信號作為前饋控制,可以使硬盤的信息讀取過程對轉動沖擊和振動更具有魯棒性[6]。
目前常用的角加速度測量系統,機械測量平臺多為單一旋轉機械,更換旋轉機械時,由于尺寸的差別容易造成系統不同心,需要重新加工相應支架,以保證整個旋轉機械系統轉軸的同心度。且由于被測旋轉機械轉軸長度的不同,角加速度傳感器的安裝位置也需要調節,存在成本高和適應性差等不足。此外,對于角加速度信息的傳輸,目前多采用有線傳輸的方式工作,即通過數據傳輸線將角加速度測量信息輸送至上位機并進行處理,對于需要長距離傳輸角加速度信息的場合,存在成本高、適應性差和線路維護困難等不足。
為了解決上述問題,本文設計了一種新型角加速度測量系統,包括機械測量平臺及信號處理模塊。通過調節機械測量平臺中的升降支架和三維滑臺,可以實現被測旋轉機械與傳感器的高度同心;將采集到的信號數據通過無線收發模塊傳輸至PC端,再經由信號處理和顯示模塊直接讀取角加速度數據,克服了傳統有線傳輸方式的缺陷,使得安裝操作更加簡便。
二、角加速度測量系統的組成
1、機械測量平臺

角加速度測量系統的機械測量平臺如圖1所示,包括平臺底座、磁粉制動器、磁粉控制器、被測旋轉機械、可升降支架、剛性聯軸器、角加速度傳感器、三維滑臺和電源接口。
其中測量平臺的底座設有安裝孔,磁粉制動器、可升降支架和三維滑臺,通過安裝孔固定在平臺底座上。被測旋轉機械固定在可升降支架上,磁粉制動器通過剛性聯軸器與被測旋轉機械同心連接,角加速度傳感器固定在三維滑臺的臺面上,被測旋轉機械與角加速度傳感器通過剛性聯軸器連接。磁粉控制器輸出端子與磁粉制動器的輸入端子連接,磁粉控制器和被測旋轉機械電源線與電源接口連接。
當需要更換被測旋轉機械時,將原有被測旋轉機械與磁粉制動器、以及角加速度傳感器的剛性聯軸器松開,然后調節角加速度傳感器所在三維滑臺的軸向調節旋鈕,使得角加速度傳感器在軸向遠離被測旋轉機械系統,再將被測旋轉機械從可升降支架上拆除。將現需測量的旋轉機械安裝在可升降支架上,并調節可升降支架的高度,保證被測旋轉機械與磁粉制動器同心,然后調節三維滑臺的軸向調節旋鈕,使得角加速度傳感器在軸向貼近被測旋轉機械系統,再調節三維滑臺的徑向和橫向調節旋鈕,保證角加速度傳感器與被測旋轉機械系統同軸心,最后將各個剛性聯軸器擰緊即可。
2、信號處理模塊
信號處理模塊包括無線發射電路、無線接收電路、信號采集電路、以及基于LabView的可視化聯機軟件。
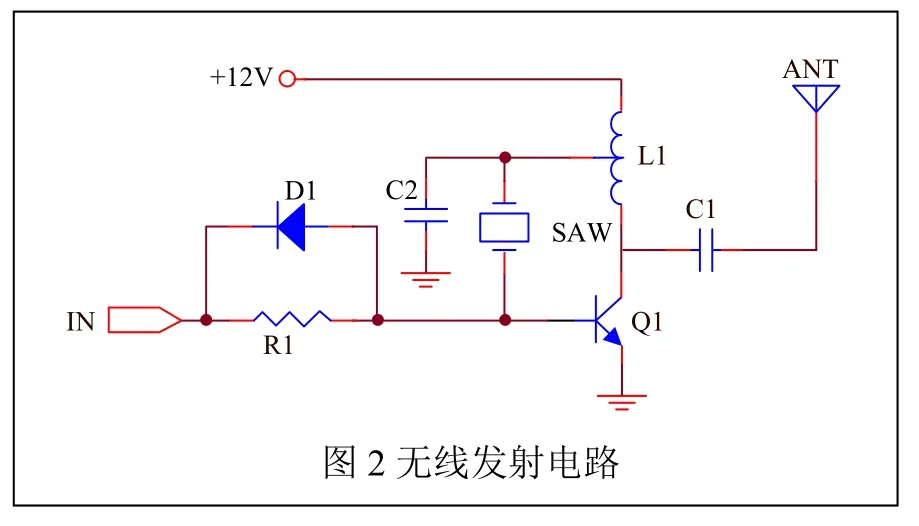
無線發射電路模塊的振蕩器采用聲表器件,如圖2所示,其中IN端口為角加速度信號輸入端,與角加速度傳感器輸出端連接;SAW為聲表器件;ANT為天線發射端,用于將角加速度信息以無線的方式向外發射。
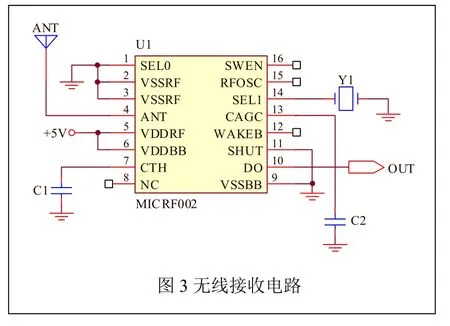
無線接收電路如圖3所示,由美國Micrel公司生產的MICRF002單片集成芯片及外圍電路構成,工作芯片為美國Micrel公司生產的MICRF002,用于無線信號的接收和解調。其中ANT為天線接收端,用于接收無線發射的角加速度信息;OUT端口為角加速度信號輸出端,與信號采集卡的輸出端口連接。
信號采集電路采用基于USB的信號采集卡,USB采集卡采用USB通信協議,無需匹配波特率,大大提高了工作效率,更重要的是完全實現了自動化,無需再人工干預。
為了充分利用計算機資源,采用虛擬實驗室LabView技術,運用特定的算法、通信協議及控制技術,使硬件設備和上位機按照程序設定的流程,完成角加速度測量數據的解析與計算、波形顯示與表格導出、傳感器校正、曲線擬合與線性關系、傅里葉分析和波形回放等功能,通過對不同模塊即子VI的調用可以實現各自不同的功能。
系統首先通過初始化模塊對串口進行設置,然后向下位機發送握手指令,如果指令錯誤,則彈窗提示握手失敗重新進行握手,如果指令正確則進入系統進行功能選擇;當進入模擬量采集時,首先要發送指令到下位機進行通知,并同時發送采集時間及采集速度設置指令,然后下位機開始進入模擬量傳感器數據采集狀態。
三、旋轉機械角加速度測量實驗
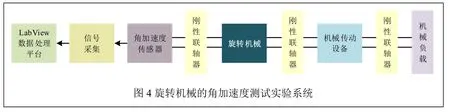
旋轉機械的角加速度測試實驗系統如圖4所示,旋轉機械轉軸的一端通過剛性聯軸器與傳動設備相連,多為齒輪箱減速器,傳動設備再通過剛性聯軸器與機械負載連接,實驗時多采用磁粉制動器,其負載大小可以通過控制電流來調節;旋轉機械轉軸的另一端通過剛性聯軸器與研制的角加速度傳感器連接,傳感器的輸出電信號通過信號采集電路傳送至上位機,通過研制的基于LabView的可視化聯機軟件進行數據處理和分析。

系統工作時,首先按照圖4連接好整個角加速度測量系統,注意與角加速度傳感器連接的聯軸器為剛性,盡量不要采用帶有硬質塑料的十字梅花聯軸器;然后調節負載的控制電流為零,即系統處用空載狀態,接通旋轉機械(單相異步電動機)的電源,旋轉機械開始運行,調節負載的控制電流,同時觀測旋轉機械的工作電流和電壓,保證旋轉機械基本工作在額定狀態;最后打開基于LabView的信號采集與處理實驗平臺,接收信號采集卡傳送的旋轉機械角加速度信息,同時將角加速度數據保存,擬合旋轉機械的角加速度響應曲線,并對測量數據進行頻譜分析,實驗結果如圖5所示。
由實驗結果可知,本文設計的角加速度測量系統,能夠對旋轉機械的角加速度情況進行實時的監測和分析。
四、結束語
本文設計的新型角加速度測量系統,通過可升降支架和三維滑臺的調節,能夠快捷、方便地實現系統中各轉軸的同心,具有成本低廉、適用性好和維護方便等優點;除此之外還綜合了無線傳輸和虛擬儀器技術,與傳統的角加速度測量系統相比,該系統靈活可調,結構簡單,在降低成本的同時還增加了應用的便利性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09
